2. Устройство по п. 1, отличающееся тем, что операцирнно-логичвский блок подключен к переключателю полярности через триггер,
3.. Устройство по пп. 1 и 2, отличающееся тем, что, с целью сокращения времени холостого хода, одни из выходов операционнологического блока соединен с входом генератора импульсов.
4.Устройство по пп. 1- - 3, от личающеесй тем, что, с целью обеспечения контроля за технологиче ским процессом, к одному из выходов операционно-логического блока подключена схема индикации полярнорти электроимпульсногополя.
5.Устройство по пп. 1 - 4, о тличающееся тем, что операционно логич ский блок содержит логическую окему управления, таймер с подключенными к его входам схемой выборки k генератором синхронизирующих тактов и формирователь команд, причем логическая схема управления входами связана с задатчиками команд выбора технологического процесса и генератором син.хронизирующих тактов, а выходами со схемой выборки, таймером, формирователем команд и генератором имг.. пульсов формирователя электроимпульсного поля, а-выход таймера связан -с генератором синхронизирукяцих такХОВ и формирователем команд, выход которого через триггер соединен с ; переключателем полярности и схемой лндикации полярности.
6.Устройство по п. 5, отличающееся тем, что к входам схемы выборки подключены задатчики длительности операций технологическог го процесса.
7.Устройство по пп. 1/ 2 и 5, отличающееся тем, что,
с целью пов1;лшения надежности, переключатель полярности смонтирован на зарядно-рас11ылительном блоке.
8.Устройство по п. 4, отличающее.с я тем, что индикаторы
полярности смонтированы на заряднораспыпительном блоке. 9. Устройство по П. 4, о т л и ч а ю щ е .е с я тем, что индикаторы полярности смонтированы на поддерживающем элементе.
10. Устройство по п. 6, о т л и чающееся тем, что задатчики длительности операций технологического процесса смонтированы на поддерживающем элементе..
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения цикловой подачи топлива и устройство для его осуществления | 2015 |
|
RU2665566C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА ОПЕРЕЖЕНИЯ ВПРЫСКА ТОПЛИВА ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2543091C1 |
| Интерферометрическая система приема и цифровой обработки сигналов | 1983 |
|
SU1141434A1 |
| Устройство для программного управления | 1980 |
|
SU954940A2 |
| Способ и устройство измерения высоты и составляющих скорости по сигналам двухканального когерентного радиовысотомера | 2024 |
|
RU2832999C1 |
| Программный регулятор | 1985 |
|
SU1247840A1 |
| Устройство для определения шагадиСКРЕТНОСТи КОРРЕляциОННОй фуНКции | 1978 |
|
SU813448A1 |
| Устройство для управления технологическим процессом | 1982 |
|
SU1166138A1 |
| Устройство для контроля перемещения железнодорожных составов | 1983 |
|
SU1207875A1 |
| СПОСОБ ЭЛЕКТРОИСКРОВОГО НАНЕСЕНИЯ ПОКРЫТИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2616694C2 |
1.УСТРОЙСТЮ ДЛЯ НАНЕСЕНИ ПОКРЫТИЙ, содержащее формирователь электроимпульсного поля с генерато импульсов, зарядно-распылительный блок с узлами подачи газа носителя и порошка и поддерживающий элемент, отличающеес я тем, что, с целью расширения технологических возможностей и улучшения качества покрытий, оно снабжено задатчиками команд выбсфа технологического процесса, переключателем полярности и операционно-логическим блоком, к входам которого подключены задатчики команд, а к выходам - исполнительные элементы узлов подачи газаносителя и лорсяика и формирователь электроиютульсного поля, причем переключатель полярности включен меяаду формирователем электроимпульсного поля и входом эаряднораспыяительного блока. if 4 8 7 1 3
1
Изобретение относится к средствам электростатического и (или) элеитроп импульсного нанесения покрытий.
Известно устройство для нанесения покрытий, включакоцее распылитель 5 электрически заряженных частиц и источник высокого напряжения (ИВН), особенностью которого является наличие в нем коквчутатора, периодически переключающего полярность напряжения,10 пЬданного на генератор заряженных частиц 1 .,
Однака отсутствие в нем синхронизации переключения полярности с другими операциями технологического процесса приводит к ухудшеник) качества покрытия, невозможности установления разных длительностей осаждения разнес полярности, сужает технологические возможности, а « наличие ивН со средней точкой делает работу с устройством неудобной и опасной,:
Наиболее близким по технической сущности и достигаемому результату к изобретению является устройство для нанесения покрытий, содержсццее | формирователь электроимпульсного 1 поля с генератором импульсов, заряд-1
но-распылительный блок с узлами подачи газ а- носителя и порошка и поддерживающий элемент 2 .
Недостатком известного устройства i является применимость- его только для однополярного режима нанесения покци|тий, что в итоге сказывается на их iкачестве.
Описанные устройства не могут перестраиваться с одного вида техпроцесса на другой, а их положительные качества невозможно совместить в одном устройстве, позволяющем осуществлять выбор типа технологического процессу как электростатического, так и электроимпульсного нанесения покрытий, и активно управлять икоГ.
Цель изобретения - расширение технологических возможностей и улучшение качеств а покрытия
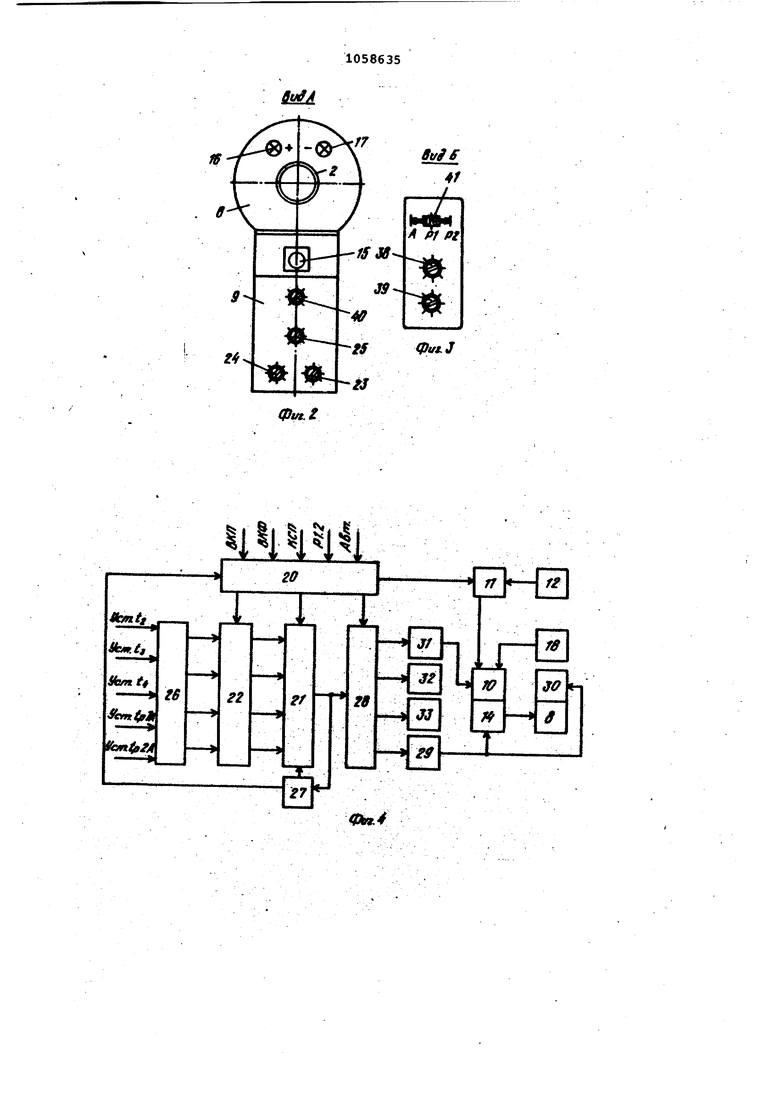
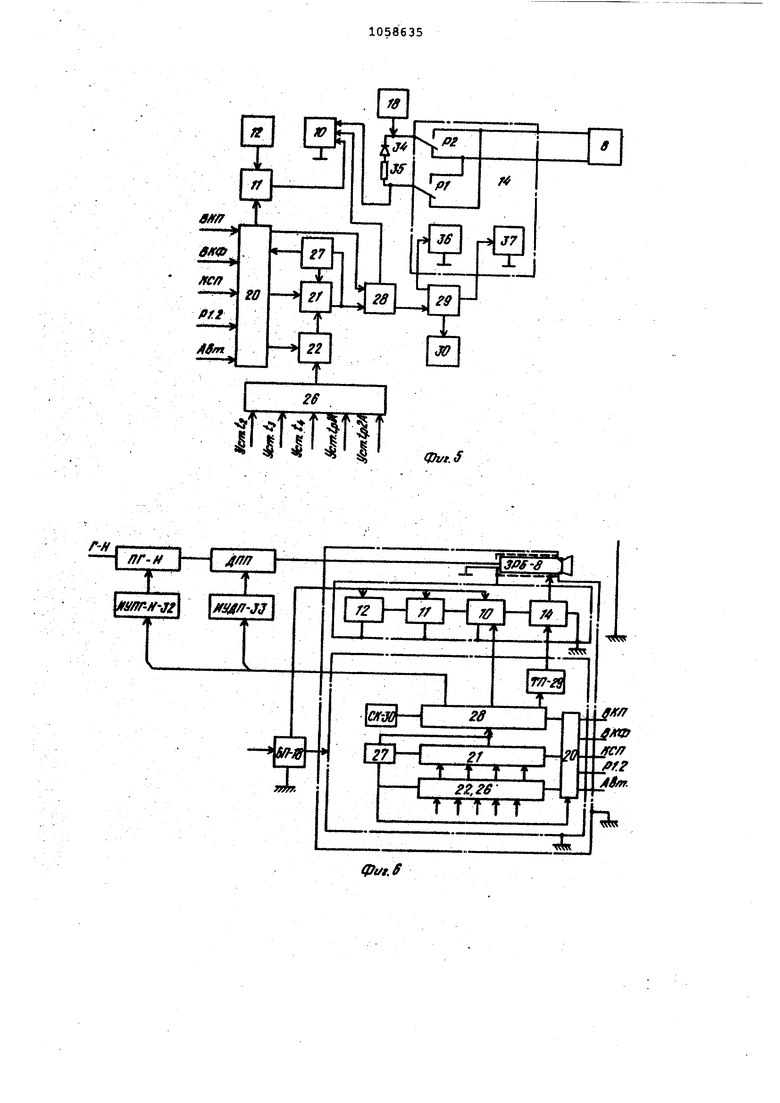
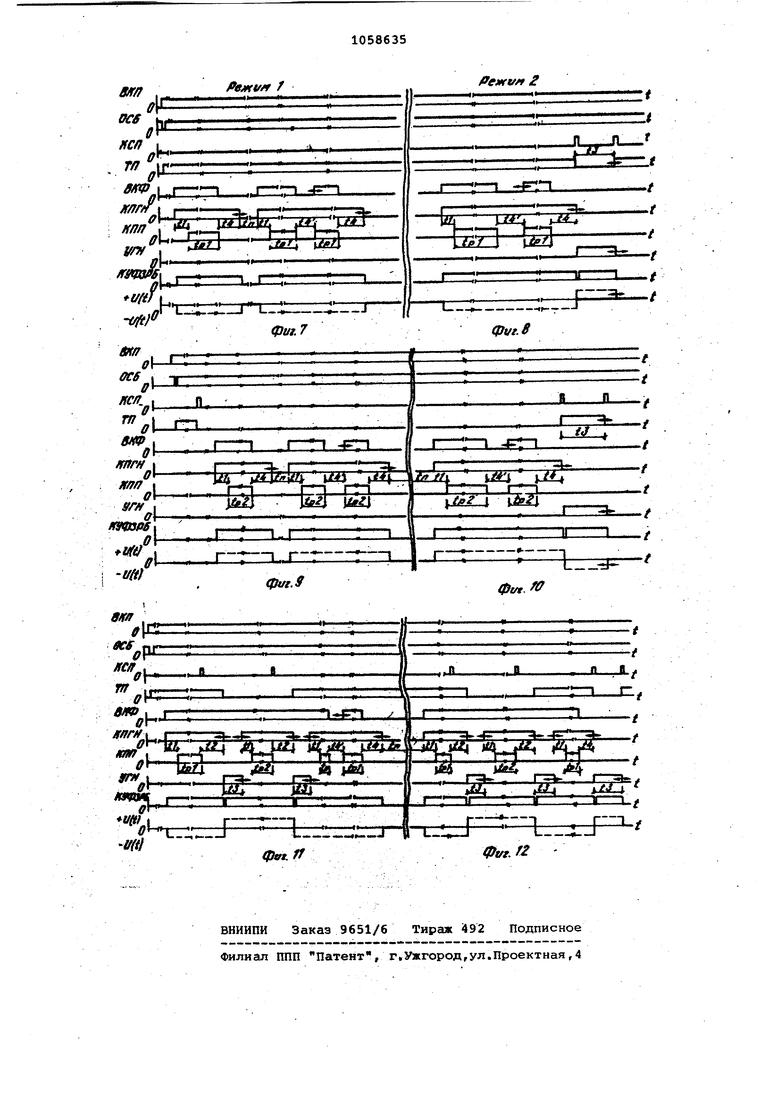
Поставленная цель достигается тем, что устройство, содержащее формирователь электроимпульсного поля с генератором импульсов, заряд но-распылительный блок с узлами подачи газа-носителя и порошка и под; держивающйй элемент, снабжено задат; чиками команд выбора технологичес; кого процерса переключателем полярности и операционно-Логическим блок к входам которого- подключены эадатч ки команд, а к выходгш - исполнительные элементы узлов подачи газаносителя и порошка и формирователь электроимпульсного поля, причем переключатель полярности включен между формирователем электроийпульс ного поля и входом зарядно-распылительного блока. Операционно-Логический блок подк чен к переключателю полярности чере триггер. Кроме того, с целью .сокращения времени холостого хода, один из выходов операционно-логического блока I соединен с входом генератора импульсо С целью обеспечения контроля за технологическим процессом, к одному из выходов операционно-логического блока подключена схема индикации полярности электроимпульсного поля. Операционно-Логический блок содержит логическую схему управления, таймер с подключенными к его входам схемой выборки и генератором синхро низирующих тактов и формирователь команд, причем логическая схема управления входами связана с задатчиками команд выбора технологического процесса и генератором синхронизирующих тактов, а выходами - со схемой выборки, таймерс 1, формирователем команд и генератором импульсов формирователя электроимпульсного поля, а выход таймера связан с генератором синхррнизирукхцих тактов и формирователем команд, выход ко торого через триггер .соединен с переключателем полярности и схемой индикации.полярности. При этом, к входам бхемы выборки подключены задат 1ики длительности операций технологического . Кроме того, с целью повышения надежности, переключатель полярност и иидикатоЕш полярности смонтирован на зарядно-распылительном блоке. Индикаторы полярности и задатчики длительности операций технологического процесса смонтированы на поддерживающем элементе. На фиг. 1 показано устройство/ общий вид; иа фиг. 2 - вид А на фиг. 1; на фиг. 3 - вид В на фиг I на фиг. 4 - структурнгш схема устройства на фиг. 5 - то же вариаит с переключателем полярности (ПП) ца вакуумных реле; на фиг. ва риант технологической схемы с размещением схемы управления в распылительном устройствеу на г..7 - временная диаграмм pea |ЛИзации однополярного процесса с отрицательной полярностью электроймпульсного поля (ЗИП) для режима Pi (переносное устройство, ручной режим); на фиг. 8 - то же, для режи ма Р2 (стационарное устройство, ручной режим); на фиг. 9 - временная диаграмма однополярного процесса с положительной полярностью ЗИП, режим Plf на фиг. 10 - то же, для режима Р2; на фиг. 11 - временная диаграмма двухполярного процесса , для режима Pi; на фиг. 12 - то же, :для режима Р2; На диаграАФ1ах обозначено: tj| время задержки команды подачи порошка (КПП), жестко программируемое аппаратными средствами и обеспечивающее равномерность подачи наносимого материала; tj - время вывода остатка материала покрытия из зарядно-распределительного блока (ЗРБ), устанавливаемого задатчиком 23; t - длительность оперсщии Вывод (в течение этого времени частицы, не осевоше на покрываемое изделие, выводятся ИЗ промежутка РБ-издел iлие) - время, необходимое для перезарядки остатка частиц в ЗРБ, устанавливаемое задатчиком 24; t4 - время пассивной работы - обеспечивает импульсный режим подачи материала покрытия и возможность регулирования его расхода, устанавливается задатчиком 25;tn и tp время активной работы (время эффективного нанесения покрытия) соответственно с ЗИП отрицательной и положительной полярностью (могут быть произвольными и выбираются оператором); t4 -. время прерывания исполнения команды КПП, если t,TO команда подачи газа-носителя (КПГН) не прерывается, что позволяет производить . точную дозировку напыляемого материала в зону нанесения покрытия, а время t маскируется при этом; t время паузы (нерабочее время), может быть произвольным. Устройство содержит (фиг. 1) ч., трубку 1 из изоляционного материала с входным патрубком 2 на одном конце и распылителем 3 - на другом, вокруг которой смонтирована система импульсных трансформаторов (ИТ) на кольцевых сердечниках 4 или кабельные ИТ 5, выводы вторичных рбмоток которых подсоединены к коронирующим электродам б. Вокруг ИТ установлен защитный экран 7. После заливки трубки СТВОЛОВОЙ части устройства - компа- . ундом получается ЗРБ 8, который монтируется на рукоятке 9 или ином поддерживающем элементе, -содержащем ос Тгшьные элементы конструкции - блок ;питания (БП), электронные схемы, коммутирующие элементы и другие необ-ходимые детали и узлы. Ко входу ЗРБ 8 - выводам первичных обмоток ИТ - подключен через ПП формирователь 10 зарядных импульсов ЗИП,, подсоединенный к выходу генераIropa импульсов (ГИ) 11, имеющему на , входе схему управления СУ 12. Кнопка 1 ПП 14и кнопка 15 служат сортветственно для подачи команд Включение формирователя (ВКФ) и Смена полярности (КСП). Устройство снабжено индикаторами 16 и 17 (наприйер, светодиоды с различным свечением ) положительной и отрицательной полярности. В рукоятке 9 (или-вне ее) распол жены блок питания (БП) 18 и операци онно-логический блок (ОЛБ) 19, основу которого составляют логическая схема управления (ЛСУ) 20,.таймер 21, схема выборки (СВ) 22 (с задатчиками ... t4-23...25, смонтированными на панели 26 рукоятки), генератор синхронизирующих тактов (FCT) 27 И1ФК)28. С выходами формирователя команд (ФК) 28 связаны фун ционально триггер 29,ПП 14, схема индикации полярнЬсти (СИП) 30 (она же схема контроля - СК на фиг, 6), а также исполнительные узлы 31 - 33 команд управления формирователем ЗРБ (КУФ ЭРВ) , подачи порсйика (КПП) и газа-носителя (КПГН), Через ПП 14 ко входу .ЗРВ подключена демпфирующая цепочка, состоящая «3 диода 34 и резистора 35, Фун цию коммутируквдих. элементов переклю чателя 14 могут выполнять, например вакуумированные реле 36 и 37, входы которых соединены с выходами тригге ра 29. Регулирование времен tpt и при работе в автоматическом ре жиме(Авт) производится с помощью задатчиков 38 и 39, изменение параметров ЗИП - регулятором 40/а смена режима работы из ручного Pi в ручной Р2 или в АВТ переключателе режима работы (ПРР) 41. . Режим Pi отличается от режима.Р2 только наличием операции Вывод, которая не исполняется при t 0. В этих режимах выполняются все виды операций в ручном управлении тСфиг.7 - 12),причем значения времен tj и tp выбираются оператором и могут быть произвольными, а времена Чр|д и tp,2A маскируются. В режиме Авт все операции выбор ного техпроцесса выполняются автома тически , причем начало исполнения по команде Включение формирователя (ВкФ), а прерывание или конец испол нения - по команде ВкФ (инверсия ВкФ), Команда смены полярности (КСП) в этом режиме выполняет функцию корректирукжцей, что позволяет активно влиять на ход техпроцесса. При t,pu t)j« О (запрещенное состояние)fрежим Авт по команде ВкФ Не исполняется. При t,д О или t.i|il5д ;0; tpJд f о исполняется работа в однополярном режиме соответственно с отрицательной или по ложительной полярностью ЗИП, а при piJi О - в двухполярном режиме. Все команды ОЛВ представляются в трех видах. 1. Команды ВкФ 13 и КСП 15 аналогичны команде Пуск, являются внешними и формируются задатчиками не посредственно с устройства; или поступают по каналам связи для автоматического управления в случае автономной работы. Этими командами аппаратные средства устройства включаются на реализацию выбранного алгоритма техпроцесса. В отсутствие к: команды ВкФ исполняется только КСП (что позволяет выбирать исходные значения полярности ЗИП ЗРВ во всех режимах работы),причем прямым условием ее исполнения является ВкФ, а все остальные операции не исполняются. Команда КСП исполняется автоматичес- ки в режимах Р2 (при t 0) и Авт (соответственно при t 0; tp. Команды КПГН, КПП 0; tpfA tp управляют внешними устройствами техпроцесса. 2. Команды КПГН, КПП, триггер полярности (ТП), ТП, управления ГИ (УГИ),ВкФ,общий сброс (ОСВ) и КУФ ЗРБ являются основными в.нутренними и служат для переключения аппаратных средств на исполнение техпроцесса, последовательность операций котсэрого осуществляют выбором соответствующих подпрограмм алгоритма его реализации в зависимости от состояния команд ВкФ, КСП, а также режимов Р1, Р2.Авт и задатчиков времени tj - t (23 - 25}, и Тел ( 38.. ). Команда ТП исполняется через время tj (операции Вывод) после КСП при наличии команды ВкФ, а в случае ВкФ - сразу за КСП поскольку t маскируется. З.Все остальные команды являются служебными и управляют непосредственно исполнением соответствующих подпрограмм посредством реализации набора микроопераций: Чтение задатчиков времен операций техпроцесса (команда Чт t),Запись в таймер значения времени соответствующей операции (команда Зп t), команды Управление схемой выборки, Управление таймером, Управление ЛСУ, Управление ФК и др. Устройства позволяет реализовать шесть основных видов технологического процесса в ручных режимах Pi и Р2 и три - в автоматическом режиме Авт, которые исполняются по соответствующим алгоритмам, запрограммированным с помощью аппаратных средств. При этом установление времени операции задатчиками на панели 26, равным.нулю, аналогично ее отсутствию в техпроцессе, в результате чего ЛСУ 20 анализирует состояние таймера 21 после записи в нем кода операции и при анализе нулевого состояния осуществляет ее пропуск. Это позволяет при необходимости изменять вид техпроцесса.
Устройство работает следующим образом,(режим Р1).
После включения питания кнопкой 42 (команда ВКП) в ЛСУ 20 формируется команда ОСБ (команда нормализации), приводящая все аппаратные средства в исходное состояние/ при этом триггер 29 устанавливается в 1 (работа с ЗИП отрицательной поярности ), а схема 30 включает соответствующую индикацию знака ЭИП. С помощью задатчика команды ВкФ кнопки 13 в ЛСУ формируются синхронизированные команды ВкФ и КПГН, в результате чего в узле подачи газа-носителя (ПГН) срабатывает исполнительный узел (ИУПГ-Н) 32, в качестве которого используется, например, электромагнит, включающий подачу газа-носителя в зону нанесения покрытия , и одновременно включается генератор 11 с формирователем импульсов 10, ив ЗРБ 8 начинают поступать электрические импульсы, которые после преобразования в ИТ,.подаются на коррнирующиё электроды, создавая в канале транспортировки порсяика объемный заряд, плотность которого определяется частотой следования импульсов ЭИП и может регулироваться регулятором 12 в соответствии с . требованиями процесса нанесения покрытия.
Подачу порсшка осуществляют после подачи газа-носителя через время t, которое с помощью служебных микрокоманд читается схемой 22 (команда ЧТ t ), записывается в цифровом/ например, 5-разрядном коде в таймер 21, время работы которого определяется значением записанного в нем хода и тактирующей последовательностью, с помощью которой код времени операции вычитается из таймера. По достижению таймером состояния, когда в нем находятся одни нули, подается команда Конец работы таймера (СчК) в ЛСУ 20, ФК 28, которые формируют команду КПП, под действием которой в дозаторе-питателе порсшка (ДПП) (фиг, 6) срабатывает, исполнительный узел (например, электромагнит) (ИУДП) 33, включеиощий подачу порошкового материала покуатия, который при прохождении канал ЗРБ 8 заряжается и оседает t на покрываемом изделии -начинается активный цикл нанесения поккштия длительностью tp , которсш определяется в каждом конкЕ)етном случае оператором, например, визуально.
После окончания цикла нанесения отжатием кнопки 13 формируется синхрокоманда ВкФ, прерывается подача порошка, команда и ИУДП 33 выключается, а исполнительный узел
ИУПГН 32 остается включенным на время t4, позволяющее очистить ЗРБ 8 от частиц порсшжа, подготовить его к новому циклу нанесения покрытия и исключить неравномерность по0 дачи порошка из-за его избыточного накопления,
Выключение команды ВкФ прерывает исполнение команды КПП, включает генератор служебных микрокоманд ЛСУ,
5 -Которые с помощью схемы выборки выг-. убирают значение t, записывают его IB таймер, считывают, после чего в ЛСУ 20 и ФК 28 подаются команды на окончание техпроцесса - команды выключения ЗРБ, КПГН и т.д., причем триггер ТП 29 своего состояния не меняет и является памятью предыдущего состояния ЭИП ЗРБ.
Таким образом, в конце времени
- t формирователь ЭИП выключается (КУФ ), цикл нанесения покрытия заканчивается (на временной диаграмме время tj,)/ но все узлы технологической линии ждут повторения команды ВкФ и ВКП - конец работы,
0 Для реализации режима Р2, предназначенного для стационарного использования устройства, по окончании времени t 4 формируется команда КСП, ТП 29 и ПП 14 меняют свое сос5 тояние на противоположное. При этом на время t ЭИП ЗРБ 8 меняет знак, а в ЛСУ формируется команда управление генератором импульсов (УГИ), с помощью которой параметры ЭИП,
0(например частота следования, уста(навливаются такими, чтобы сократить .длительность операции Вывод, т.е. получить минимальное t. ,
После окончания работы таймера (по отсчету t), ЛСУ формирует КСП, ТП и ПП 14 переводят параметры поля ЗРБ в первоначальное состояние.
Чтобы реализовать двухполярный процесс нанесения покрытий, после .
50 отработки описанного режима Р1, осуществляют подачей команды КСП 15 смену полярности ЭИП с отрицательной на положительную. При этом КПП прерывается, а в таймер запйсывает55 ся значение tj, по окончании отсчета которого подается команда на ТП, который меняет свое состояние на противоположное и одновременно прерывается действие команды КПГН, Пос.
60 ле изменения полярности ЭИП в таймер записывается значение tj, на время которого ГИ 11 с помощью ко манды УГИ выдает в формирователь 10 импульсы с максимальной частотой
е:следования. По окончании t включается КПГН, а еще через t - команда КПП и осуществляют нанесение покрытия, как описано, но уже с другой полярность частиц осаждаемого материала. На. время переключения полярности -ЗИП, например, 1 - 3 мс, формирователь выключается командой КУФ ЗРБ, что исключает нежелателные переходные процессы в ЗРВ, повышает надежность ПП 14 и устройства в целом. Описанная последовательность операц устраняет возможность агрегатизации .частиц в ЗРБ и промежутке между ним И noKE«biBaeh4JM изделием, синхрониэи рует работу всех элементов, позволя (получать качественные покрытия. : В дальнейшем при ровторенни циклов нанесения каждая команда КСП исполняется аналогично по общему алгоритму, вид котрого можно изменя исключая ту или иную операцию из их последовательности. Характерной особенностью двухпо1яярного режима является существование минимального значения времени следования команды КСП, которые, как следует из диаграмм, не может быть меньше, чем i-сц у + д . Если tc t + t, команда КСП не исполняется, а устройство продолжает отработку алгоритма согласн предыдущей команде КСП, пока услови ее исполнения ие будет выполнено. Чтобы реализовать описанную рабо ту устройства в автоматичеком рожиме, необходимо переключатель режима работы 41 перевести, в положение Ав и установить заданное значение времени активного нанесения покрытия. заранее определенное из условий оптимизации Техпроцесса, например, методом экспериментального хрономет рирования. Когда tp,д п « о, О, осуществляется работа в однополярном технологическом процессе с отри цательной полярностью ЗИП, а когда PiA ° Р2Д п О - с положительной полярностью, причем подача команды ВкФ приводит к автоматической отработке одного цикла соответственно с активным временем tp|д или , который повторяется, если перевести работу устройства в режим прерывания командой ВкФ. .Бели же установить задатчиком 38 и 39 значения времени tp О flK РИ подаче команды ВкФ устройство автоматически (сначала записывается в таймер и отра батывается tp , а затем ) отрабатывает операции техпроцесса в соответствии с диаЬраммой по фиг.11 : В режиме Авт, также как ив ручных режимах Р1 и Р2, при t t происходит прерывание команды КПП без прерывания команды КПГН, При этом состоя ние таймера, отсчитывающего время tn, устанавливается по окончании прерывания ВкФ в исходное (минимальное время прерывания определяется ГСТ 27 и составляет, например, 0,25 с) а ЛСУ запоминает предыдущее состояние процесса и продолжает работу при подаче команды ВкФ. Команда КСП в этом режиме является корректирующей при выполнении условия минймального времени следования, причем коррекция, в основном, определяет возможность изменения состояния ЗИП на противоположное, при этом Выполнение предыдущей операции игнорируется, и устройство начинает новый цикл согласно алгоритма работы. Изобретение существенно раслаиряет технологические возможности процесса нанесения покрытий, делает его более универсальным, таккак позволяет оперативно выбирать, видоизменять и корректировать его ход. Возможйость устаиовлени51 времен длитель.ности операций, их пропуск, работа с управляемым прерыванием операций, использование приема маскировки делает технологический процесс гибким и удобным на практике, позволяет эффективно расходовать материал покрытий , повьаиает производительность . Ьруда. Возможность динамической крр- ректировки техпроцесса в режиме Авт,Память состояния полярности ЭЙП, управление параметрами ЗИП в зависимости от вида операции и номенклатуры порсмиков материала покрытия, частичный контроль за техпроцессом с помо|щью cxeNH индикации полярности ЗИП также расширяет технологические возможности. Работа в ручном и автоматическом режимах, полная автономность при переносном или стационарном использовании с возможностью дистанционного управления nq каналам связи, позволяет организовать практически любые виды существующих техпроцессов при одно временном обеспечении их максимально возможной помехоустойчивости. Размещение двухполярного источника ЗИП и ЗРБ noBbBuaejr надежность и безопасность работы с устройством.Улучшению качестйа покрытия сйрСЪбствует единый алгоритм реализации двухполярного процесса нанесения покрытия с помощью двухполярного источника ЗИП (с малым временем перекоммутации), что устраняет агрегатизацию частиц в ЗРБ и перед; покрываемым изделием. Возможность выбора времен активного нанесения покрытия в режиме Ав произвольным позволяет оптимизировать процесс нанесения по качеству покрытия.
|i|i|f|fIT
ф1/1.5
фг/tS
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| 1968 |
|
SU418220A1 | |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР 900491, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
