Область техники, к которой относится изобретение
Изобретение относится к радионавигации и может быть использовано для измерения высоты и составляющих скорости воздушного судна (ВС).
Достигаемый технический результат - измерение высоты и трех составляющих скорости ВС по сигналам двухканального когерентного радиовысотомера (РВ) при сниженных габаритах антенной системы.
Изобретение может быть использовано в РВ воздушных судов, в том числе и в РВ беспилотных летательных аппаратов.
Уровень техники
На сегодняшний день навигационные системы ВС, имеющие возможность измерения высоты и трех составляющих скорости ВС, являются либо неавтономными (навигационная аппаратура потребителей ГНСС), либо имеют большие массогабаритные характеристики антенных систем (ДИСС) или обладают высокими погрешностями при длительной автономной работе (БИНС). В связи с этим для условий сложной помеховой обстановки и длительного автономного полета ВС является актуальным разработка способов измерения высотно-скоростных параметров, обеспечивающих высокую точность и оперативность измерений при малых размерах антенной системы.
Известен способ [1], в котором определение высоты и составляющих путевой скорости ВС производится за счет анализа мгновенных значений взаимно-корреляционной функции (ВКФ) отраженного от земной поверхности сигнала между двумя приемными и одной приемопередающей. Центры антенн находятся в вершинах равнобедренного треугольника, наибольшая сторона параллельна продольной оси ЛА и равна 4Х0, расстояние от центра второй антенны до наибольшей стороны треугольника равно 2Y0. Суть способа заключается в том, что производится излучение приемо-передающей антенной в направлении подстилающей поверхности коротких пакетов радиоимпульсов. Вычисляются мгновенные значения взаимно-корреляционных функций, между сигналами, принятыми 1-й, 2-й и 3-й антеннами

где  - нормированные сигналы, принятые на 1-ю, 2-ю и 3-ю антенны в моменты времени τk;
- нормированные сигналы, принятые на 1-ю, 2-ю и 3-ю антенны в моменты времени τk;
В - количество отсчетов сигналов и1,u2, u3, использующихся при построении ВКФ;
К - количество отсчетов построения ВКФ, В+K≤NΣ;
NΣ - количество отсчетов времени оцифрованного сигнала;
k - индекс значений ВКФ при задержках между сигналамиτk; k=0, …, К-1;
Z - номер отсчета ВКФ, соответствующий 0-й задержке между сигналами;
F12k - ВКФ между сигналами, принятыми на 1-ю и 2-ю антенны;
F23k - ВКФ между сигналами, принятыми на 2-ю и 3-ю антенны;
вычисление положения максимума ВКФ (в относительных единицах)  где параметры b и а определяются из системы уравнений
где параметры b и а определяются из системы уравнений

где 2М+1 - количество точек, по которым производится аппроксимация;
Nd - номер дискрета, на который приходится максимум ВКФ;
 - значения усредненной ВКФ;
- значения усредненной ВКФ;
Wj=М-|j|+1 - треугольная весовая функция;
оценка значений составляющих путевой скорости Vx и Vz согласно выражениям:
где τ1, τ2 - транспортная задержка между сигналами, принятыми на 1-ю и 2-ю антенны и 2-ю и 3-ю антенны соответственно,  Δt - дискрет построения ВКФ.
Δt - дискрет построения ВКФ.
Недостатком способа является необходимость наличия трех антенн, что приводит к увеличению массогабаритных характеристик устройства, реализующего способ.
Известны способы однолучевого измерения высоты, путевой и вертикальной скорости ВС [2-4], которые основаны на зондировании земной поверхности радиолокационным сигналом через широко направленную антенну, когерентном приеме отраженного сигнала с получением дальность-доплеровского портрета (ДДП), спектральном анализе ДДП и формировании оценок высотно-скоростных параметров.
Наиболее близким по технической сущности к заявляемому способу, выбранным в качестве прототипа, является способ [4] однолучевого определения высотно скоростных параметров воздушного судна по сигналам когерентного радиовысотомера, в котором измерение навигационных параметров носителя РВ происходит следующим образом:
Через широконаправленную антенну радиовысотомера излучают вертикально вниз зондирующий сигнал;
когерентно принимают эхо-сигнал и формируют М дальностно-доплеровских портретов  где каждый
где каждый  - спектральное преобразование Фурье эхо-сигнала РВ на всех дальностях n рабочего диапазона высот, kF - доплеровские частоты, М - варьируемый параметр, определяемый скоростными характеристиками носителя, m - порядковый номер ДДП;
- спектральное преобразование Фурье эхо-сигнала РВ на всех дальностях n рабочего диапазона высот, kF - доплеровские частоты, М - варьируемый параметр, определяемый скоростными характеристиками носителя, m - порядковый номер ДДП;
далее для каждого m-го ДДП:
определяют дисперсии шума  и сигнала с шумом
и сигнала с шумом  для разрешаемых элементов ДДП
для разрешаемых элементов ДДП  по доплеровской частоте kF, исходя из предположения о положении скачка мощности сигнала на дальности nос
по доплеровской частоте kF, исходя из предположения о положении скачка мощности сигнала на дальности nос

где K - длина реализации полученного в выбранном окне дальностей участка ДДП по дальности, выраженная в числе разрешаемых элементов δR;
по максимуму логарифма функционала правдоподобия

находят положение скачка дисперсии noc(kF) для всех доплеровских частот m-го ДДП; вычисляют дисперсии шума  и сигнала с шумом
и сигнала с шумом 

где kF1 и kF2 - доплеровские частоты отсчетов ДДП в каждом канале дальности n, где наблюдается скачек мощности сигнала, N - количество доплеровских частот; по максимуму логарифма функционала правдоподобия

находят положение скачка дисперсии kF1(n) и kF2(n) для всех каналов дальности m-го ДДП;
по совокупности, формируют М матриц размером K×N, где ненулевые элементы имеют координаты nос(kF), kF1(n) и kF2(n), равны единице и определяют КМК каждого m-го ДДП в координатах дальность-доплеровская частота;
формируют вектор  описывающий координату дальности средневзвешенной КМК по МДДП;
описывающий координату дальности средневзвешенной КМК по МДДП;
формируют гипотезу о высотно-скоростных параметрах ВС Xi=[Hi,Vпi,Vвi]T, где Hi, Vпi, Vвi - высота, путевая и вертикальные скорости ВС для i-той гипотезы;
для исходной гипотезы значение высоты Н0, путевой Vп0 и вертикальной Vв0 составляющих скорости ВС берутся как соответствующие центральные значения априорно известных окон;
рассчитывают для i-той гипотезы координаты дальности КМК Ri(kF) для всех доплеровских частот в диапазоне 

где δF - ширина доплеровского фильтра ДДП, λ - длина волны;
формируют вектор  описывающий координату дальности КМК для i-той гипотезы; методом наименьших квадратов находят оптимальную оценку ошибки ΔXi вектора Xi относительно истинного значения
описывающий координату дальности КМК для i-той гипотезы; методом наименьших квадратов находят оптимальную оценку ошибки ΔXi вектора Xi относительно истинного значения

где матрица-якобиан  ϕ - корреляционная матрица шумов измерения дальностей Ri(kF) размерностью N×N;
ϕ - корреляционная матрица шумов измерения дальностей Ri(kF) размерностью N×N;
формируют новую (i+1) гипотезу о высотно-скоростных параметрах ВС
Xi+1=Xi+ΔXi;
повторяют итерации уточнения вектора оцениваемых параметров Xi до снижения вектора ошибки ΔXi до допустимых значений, переходят в режим слежения, выдают потребителю оценки высоты, путевой и вертикальной скорости  в режиме слежения.
в режиме слежения.
Способ обеспечивает однолучевое измерение путевой и вертикальной скорости ВС в условиях ограниченности по массогабаритным характеристикам антенной системы над различными видами поверхности.
Недостатком способа является отсутствие возможности измерения составляющих путевой скорости ВС, что накладывает ограничения на применение способа в автономных навигационных устройствах.
Раскрытие сущности изобретения
Целью изобретения является обеспечение возможности измерения высоты и трех составляющих скорости ВС по сигналам двухканального когерентного радиовысотомера.
Указанный результат достигается за счет:
- зондирования земной поверхности радиолокационным сигналом через широконаправленную приемопередающую антенну (ППА);
- одновременного приема эхо-сигнала двумя антеннами: ППА и приемной широконаправленной (ПА) когерентного радиовысотомера, разнесенными вдоль оси Z в связанной с ВС системе координат на базу интерферометра L=λ, λ - длина волны источника излучения, ось Z расположена перпендикулярно продольной оси ВС в сторону правого крыла;
- формирования комплексных ДДП по принятым двумя антеннами сигналам и соответствующих им матриц кривой максимального контраста (КМК) в координатах дальность-доплеровская частота (n, kF);
- расчета средневзвешенных координат КМК эхо-сигнала по двум ДДП;
- расчета разности фаз отсчетов двух ДДП со средневзвешенными координатами КМК;
- расчета фазовым методом значений угла прихода эхо-сигналов β по КМК эхо-сигнала со средневзвешенными координатами;
- расчета средневзвешенной оценки угла сноса ВС α;
- расчета значений путевой Vп и вертикальной скорости Vв ВС по КМК эхо-сигнала со средневзвешенными координатами.
- оценки продольной и поперечной составляющих скорости ВС согласно выражениям:
Vx=Vпcos(α) и Vz=Vпsin(α).
Краткое описание чертежей
Сущность предлагаемого способа однолучевого измерения высоты и составляющих скорости воздушного судна поясняется дальнейшим описанием и чертежами.
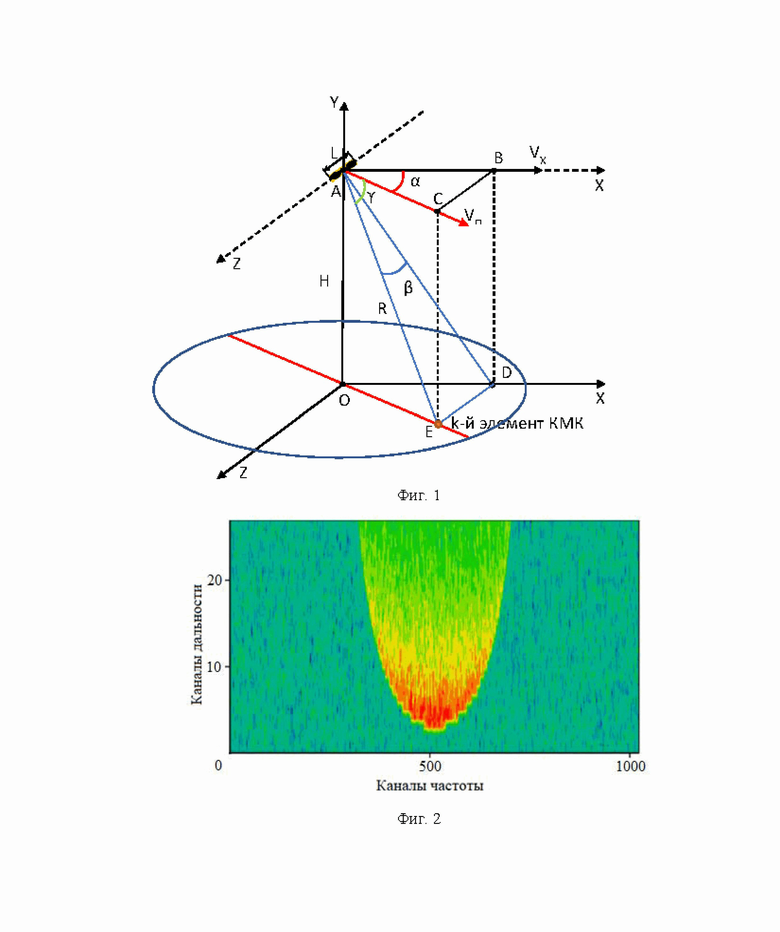
Фиг. 1 отражает пространственное представление задачи.
На фиг. 2 представлена модель ДДП.
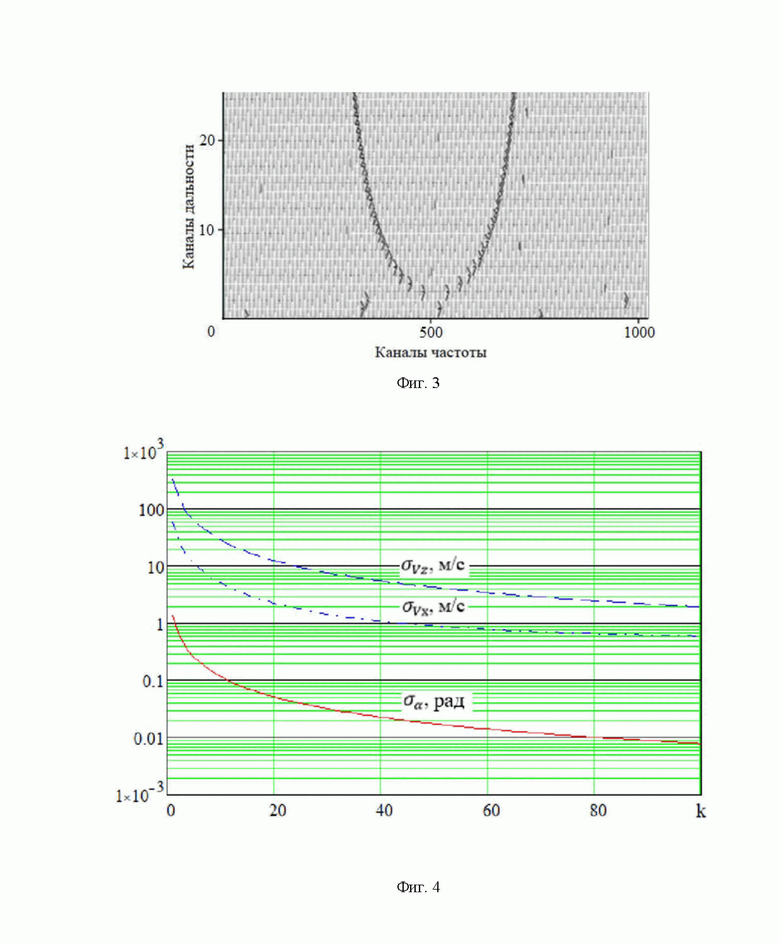
На фиг. 3 представлена средневзвешенная КМК, полученная при обработке ДДП от двух приемных антенн.
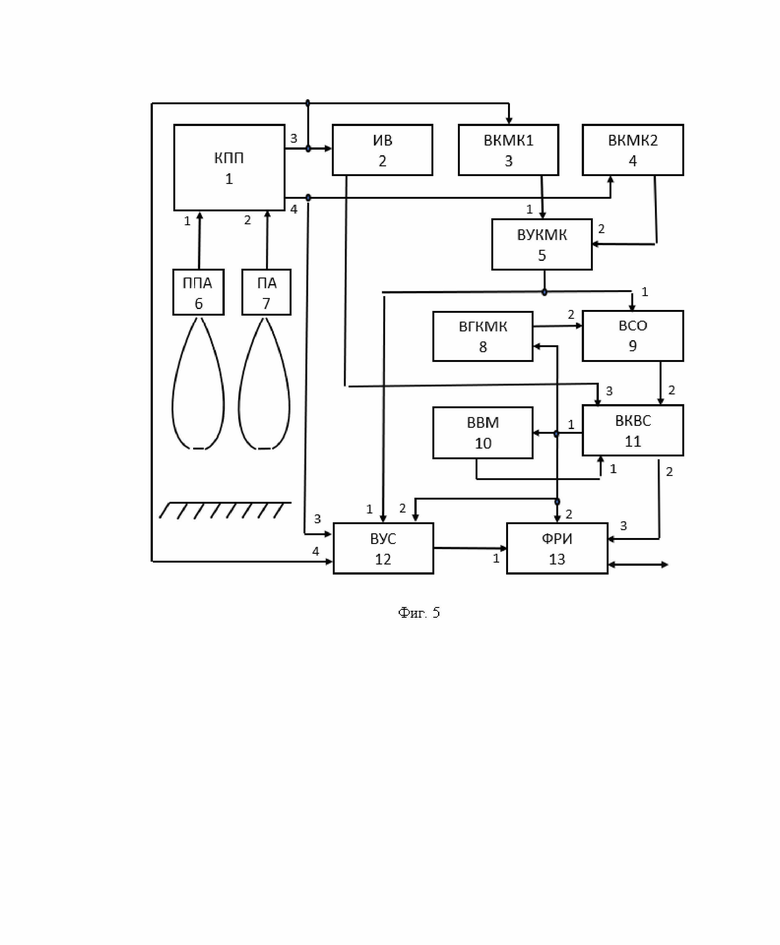
На фиг. 4 представлены зависимости значений СКО погрешности измерения угла сноса σα и составляющих путевой скорости  ВС от числа k элементов разрешения на КМК.
ВС от числа k элементов разрешения на КМК.
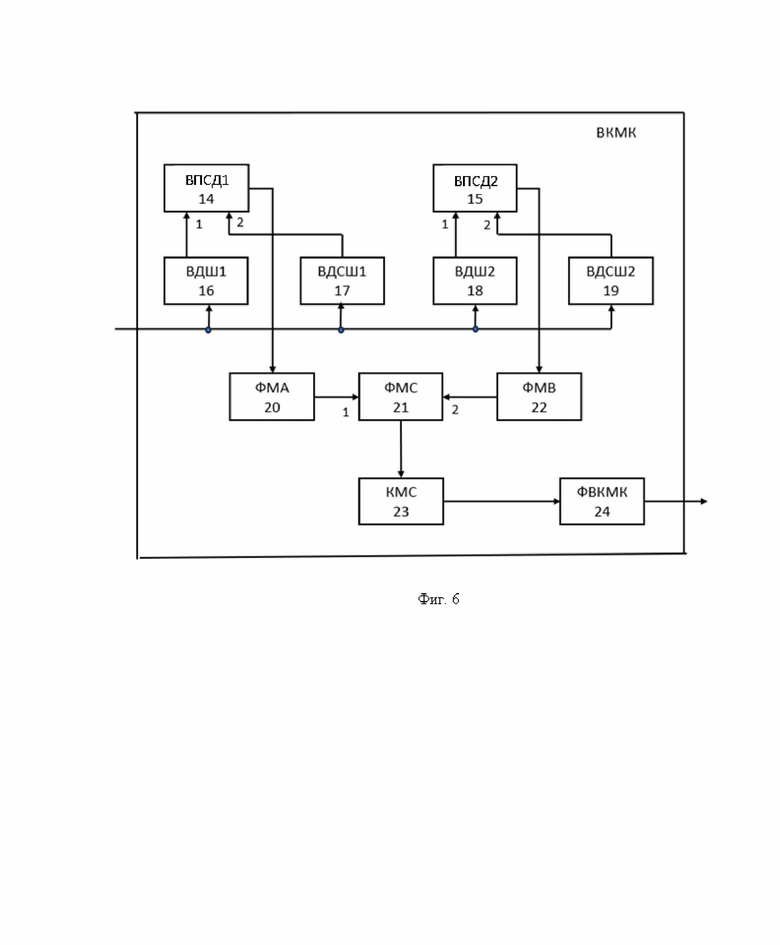
На фиг. 5 представлена структура радиовысотомера, реализующего предлагаемый способ измерения высоты и составляющих скорости ВС.
На фиг. 6 представлена блок-схема вычислителей кривой максимального контраста (ВКМК) по данным ДДП.
На фиг. 5 приняты следующие обозначения:
1 - когерентный приемо-передатчик (КПП);
2 - измеритель высоты (ИВ);
3- первый вычислитель кривой максимального контраста (ВКМК 1);
4 - второй вычислитель кривой максимального контраста (ВКМК 2);
5 - вычислитель усредненной кривой максимального контраста (ВУКМК);
6 -приемопередающая антенна (ППА);
7 - приемная антенна (ПА);
8 - вычислитель гипотез кривой максимального контраста (ВГКМК);
9 - вычислитель сигнала ошибки (ВСО);
10 - вычислитель весовой матрицы (ВВМ);
11 - вычислитель координат вектора состояния (ВКВС);
12 - вычислитель угла сноса (ВУС);
13 - формирователь результата измерений (ФРИ).
На фиг. 6 приняты следующие обозначения:
14 - первый вычислитель положения скачка дисперсии (ВПСД1);
15 - второй вычислитель положения скачка дисперсии (ВПСД2);
16 - первый вычислитель дисперсии шума (ВДШ 1);
17 - первый вычислитель дисперсии сигнала с шумом (ВДСШ 1);
18 - второй вычислитель дисперсии шума (ВДШ 2);
19 - второй вычислитель дисперсии сигнала с шумом (ВДСШ 2);
20 - формирователь матрицы А (ФМА);
21 - формирователь матрицы С (ФМС);
22 - формирователь матрицы В (ФМВ);
23 - корректор матрицы С (KMC);
24 - формирователь вектора кривой максимального контраста (ФВКМК).
На фиг. 5 последовательно соединены блоки КПП 1, ВКМК1 3, ВУКМК 5, ВУС 12 и ФРИ 13; выход ВУКМК 5 через ВСО 9 соединен с вторым входом ВКВС 11, первый выход ВКВС 11 соединен с входом ВГКМК 8, вторым входом ВУС 12, входом ВВМ 10 и вторым входом ФРИ 13; второй выход ВКВС 11 соединен с третьим входом ФРИ 13; четвертый выход КПП 1 через ВКМК2 4 соединен с вторым входом ВУКМК 5; третий выход КПП 1 через ИВ 2 соединен с третьим входом ВКВС 11; четвертый выход КПП 1 соединен с третьим входом ВУС 12; третий выход КПП 1 соединен с четвертым входом ВУС 12; выход ВВМ 10 соединен с первым входом ВКВС 11; первый вход КПП 1 соединен с выходом ППА 6, второй вход КПП 1 соединен с выходом ПА 7.
На фиг. 6 вход блока ВКМК соединен с входами ВДШ1 16, ВДСШ1 17, ВДШ2 18 и ВДСШ2 19; выход ВДШ1 16 через последовательно соединенные ВПСД1 14, ФМА 20, ФМС 21, КМС23 и ФВКМК 24 подключен с выходу блока; выход ВДШ2 18 через последовательно соединенные ВПСД2 15 и ФМВ 22 подключен к второму входу ФМС 21; выход ВДСШ1 17 соединен с вторым входом ВПСД1 14, выход ВДСШ2 19 соединен с вторым входом ВПСД2 15.
Осуществление изобретения
Пояснения к предлагаемому способу измерения угла сноса ВС  (фиг. 1) заключаются в том, что все разрешаемые элементы КМК nсв(kF) находятся в вертикальной плоскости, в которой находится вектор скорости ВС V. Связь угла сноса α с углами визирования β(ncв, kF) разрешаемых элементов КМК относительно плоскости XY ВС при малых β определяется выражением
(фиг. 1) заключаются в том, что все разрешаемые элементы КМК nсв(kF) находятся в вертикальной плоскости, в которой находится вектор скорости ВС V. Связь угла сноса α с углами визирования β(ncв, kF) разрешаемых элементов КМК относительно плоскости XY ВС при малых β определяется выражением
где δR - разрешение радиовысотомера ВС по дальности; где Н - высота ВС;
γ - угол места разрешаемого элемента КМК.
В предлагаемом способе углы визирования β(nсв, kF) разрешаемых элементов КМК nсв(kF) определяются фазовым суммарно-разностным моноимпульсным методом по данным приема отраженного сигнала  двумя антеннами, разнесенными по оси Z ВС на расстояние L, по выражениям
двумя антеннами, разнесенными по оси Z ВС на расстояние L, по выражениям
где λ - длина волны зондирующего сигнала РВ.
Сглаженную оценку угла сноса  определяют как взвешенную оценку угла сноса ВС
определяют как взвешенную оценку угла сноса ВС  по всем полярным координатам разрешаемых элементов КМК (nсв, β, γ)
по всем полярным координатам разрешаемых элементов КМК (nсв, β, γ)
где  - операция суммирования по всем элементам КМК, сигнал от которых превышает порог обнаружения.
- операция суммирования по всем элементам КМК, сигнал от которых превышает порог обнаружения.
С учетом измеренной ранее путевой скорости Vп оценки составляющих путевой скорости  рассчитываются по выражениям
рассчитываются по выражениям

Предлагаемый способ измерения высоты и составляющих скорости по сигналам двухканального когерентного радиовысотомера включает:
зондирование земной поверхности радиолокационным сигналом через широконаправленную приемопередающую антенну (ППА);
одновременный прием эхо-сигнала двумя антеннами: ППА и приемной широконаправленной (ПА) когерентного радиовысотомера, разнесенных вдоль оси Z в связанной с ВС системе координат на базу интерферометра L=λ, λ - длина волны источника излучения, ось Z расположена перпендикулярно продольной оси ВС в сторону правого крыла; формирование двух комплексных дальность-доплеровских портретов (ДДП)  и
и  по принятым ППА и ПА сигналам на основе спектрального Фурье анализа эхо-сигналов в каждом канале дальности n;
по принятым ППА и ПА сигналам на основе спектрального Фурье анализа эхо-сигналов в каждом канале дальности n;
получение первичной оценки высоты ВС  как минимальной, усредненной по нескольким измерениям дальности до разрешаемых элементов ДДП, мощность отраженного сигнала от которых превышает порог обнаружения;
как минимальной, усредненной по нескольким измерениям дальности до разрешаемых элементов ДДП, мощность отраженного сигнала от которых превышает порог обнаружения;
определение номера канала дальности, соответствующего оценке высоты ВС

где int,{.} - операция округления до большего целого;
формирование для каждого ДДП  соответствующих векторов максимального контраста
соответствующих векторов максимального контраста  по единому алгоритму:
по единому алгоритму:
определение дисперсии шума  и сигнала с шумом
и сигнала с шумом  для разрешаемых элементов ДДП
для разрешаемых элементов ДДП  по доплеровской частоте kF, исходя из предположения о положении скачка мощности сигнала на дальности nос, согласно выражению;
по доплеровской частоте kF, исходя из предположения о положении скачка мощности сигнала на дальности nос, согласно выражению;

где n - номер выборки сигнала по дальности в окне дальностей участка ДДП, 
K - длина реализации полученного в выбранном окне дальностей участка ДДП по дальности, выраженная в числе разрешаемых элементов δR;
вычисление логарифма функции правдоподобия  принятой огибающей амплитуды отраженного сигнала
принятой огибающей амплитуды отраженного сигнала  по доплеровской частоте kF, согласно выражению;
по доплеровской частоте kF, согласно выражению;

нахождение положения скачка дисперсии эхо-сигнала noc(kF) для разрешаемых элементов ДДП  по доплеровской частоте kF по гипотезе, дающей максимум логарифма функции правдоподобия
по доплеровской частоте kF по гипотезе, дающей максимум логарифма функции правдоподобия 
формирование нулевой матрицы Aj из K строк и N столбцов, где индекс строки равен индексу канала дальности n, индекс столбца равен индексу доплеровского фильтра kF;
замена значения элемента матрицы Aj с координатами (n, kF) соответствующим положению скачка дисперсии сигнала ДДП на дальности nос, на «1»;
замена значений элементов матрицы Aj, у которых координата дальности
n∈[nh,nh+3], на «0»;
вычисление дисперсии шума  и сигнала с шумом
и сигнала с шумом  согласно выражению;
согласно выражению;

вычисление логарифма функции правдоподобия  принятой огибающей амплитуды отраженного сигнала в канале дальности n, согласно выражению
принятой огибающей амплитуды отраженного сигнала в канале дальности n, согласно выражению

нахождение положения скачков дисперсии эхо-сигнала kF1(n) и kF2(n) для разрешаемых элементов ДДП  по дальности n по гипотезе, дающей максимум логарифма функции правдоподобия
по дальности n по гипотезе, дающей максимум логарифма функции правдоподобия 
формирование нулевой матрицы Bj из K строк и N столбцов, где индекс строки равен индексу канала дальности n, индекс столбца равен индексу доплеровского фильтра kF;
замена значения элемента матрицы Bj с координатами (n, kF) на «1» на частотах kF1,kF2;
формирование матрицы Cj

формирование для каждого элемента Cj с координатами (n, kF) квадратной матрицы Gp размером 3×3
где р=1…N*K.
замена значения  на «0», если сумма всех элементов Gp равна 1;
на «0», если сумма всех элементов Gp равна 1;
определение каналов дальности, соответствующих скачку дисперсии эхо-сигнала nj(kF) по первой координате ненулевых элементов матрицы Cj;
формирование вектора  описывающего координату дальности разрешаемого элемента КМК наблюдаемого ДДП с j-той приемной антенны когерентного радиовысотомера
описывающего координату дальности разрешаемого элемента КМК наблюдаемого ДДП с j-той приемной антенны когерентного радиовысотомера

Далее вычисляют вектор  - средневзвешенных координат кривой максимального контраста эхо-сигнала, равного половине суммы векторов
- средневзвешенных координат кривой максимального контраста эхо-сигнала, равного половине суммы векторов  с округлением до ближайших целых значений;
с округлением до ближайших целых значений;
формируют гипотезы о высотно-скоростных параметрах ВС Xi=[Hi, Vпi, Vвi]T, где Hi, Vпi, Vвi - высота, путевая и вертикальная скорости ВС для i-той гипотезы. Для исходной гипотезы (i=0) значение высоты Н0 берется равным  в качестве значений путевой Vп0 и вертикальной FB0 составляющих скорости ВС берутся соответствующие центральные значения априорно известных окон;
в качестве значений путевой Vп0 и вертикальной FB0 составляющих скорости ВС берутся соответствующие центральные значения априорно известных окон;
определяют для i-той гипотезы координат дальности соответствующих элементов КМК Ri(kF) для всех доплеровских частот в диапазоне 

в расчетах Ri берут элементы КМК, находящиеся в диапазоне дальностей от первичной оценки канала высоты  до положения максимально удаленной точки ДДП (nсв, kF),
до положения максимально удаленной точки ДДП (nсв, kF),
амплитуда которой превышает порог обнаружения; формируют вектор КМК для i-той гипотезы 

находят матрицу-якобиан Di(kF) размерностью N×3 для всех доплеровских частот в диапазоне  согласно выражениям:
согласно выражениям:
находят оптимальную оценку ошибки ΔXi вектора Xi относительно истинного значения методом наименьших квадратов

где  - корреляционная матрица шумов измерения дальностей Ri(kF) размерностью N×N,
- корреляционная матрица шумов измерения дальностей Ri(kF) размерностью N×N,  - дисперсия оценок измерения соответствующей координаты дальности средневзвешенной КМК;
- дисперсия оценок измерения соответствующей координаты дальности средневзвешенной КМК;
формируют новую i+1 гипотезу о высотно-скоростных параметрах ВС согласно выражению:

повторение итерации уточнения вектора оцениваемых параметров Xi до снижения вектора ошибки ΔXi до допустимых значений;
далее для каждой координаты вектора  средневзвешенной КМК (ncв(kF)) по двум комплексных ДДП
средневзвешенной КМК (ncв(kF)) по двум комплексных ДДП  вычисляют суммарный
вычисляют суммарный  и разностный
и разностный  комплексный отсчеты
комплексный отсчеты

вычисляют угол β(ncв, kF) между направлением на разрешаемый элемент КМК плоскостью, нормальной к базе L интерферометра, ортогональной плоскости XY ВС

вычисляют угол места γ(nсв, kF) разрешаемых элементов КМК

вычисляют взвешенную оценку угла сноса ВС  по всем полярным координатам разрешаемых элементов КМК (nсв, β, γ)
по всем полярным координатам разрешаемых элементов КМК (nсв, β, γ)

где  - операция суммирования по всем элементам КМК, сигнал от которых превышает порог обнаружения.
- операция суммирования по всем элементам КМК, сигнал от которых превышает порог обнаружения.
вывод формулы оценки угла сноса ВС представлен в приложении; вычисляют оценки составляющих путевой скорости согласно выражениям

формируют результирующий вектор высотно-скоростных параметров ВС  - оценка высоты полета ВС и его вертикальная скорость, полученные на этапе итераций уточнения вектора оцениваемых параметров Xi;
- оценка высоты полета ВС и его вертикальная скорость, полученные на этапе итераций уточнения вектора оцениваемых параметров Xi;
переходят в режим слежения за параметрами в когерентном радиовысотомере и выдают потребителю оценки высоты и трех составляющих скорости ВС в режиме слежения.
Устройство, реализующее предлагаемый способ измерения высоты и трех составляющих скорости ВС, приведено на фиг. 5 и фиг. 6. Работа его происходит в следующей последовательности.
Во время активной работы КПП 1 формирует зондирующий сигнал, который излучается через ППА вертикально в сторону земной поверхности, отраженный сигнал принимается ППА 6 и ПА 7, ориентированными по вертикали. База интерферометра, образованного ППА 6 и ПА 7, ориентирована вдоль оси Z воздушного судна (ВС) L=λ, где λ - длина волны зондирующего сигнала радиовысотомера. По ППА 6 и ПА 7 отраженным сигналам на третьем и четвертом выходах КПП 1 формируются соответствующие комплексные дальность-доплеровские портреты (ДДП) сцены  где n - номер дальности, kF - номер доплеровской частоты.
где n - номер дальности, kF - номер доплеровской частоты.
По ДДП  измеритель высоты ИВ 2 получает первичную оценку высоты воздушного судна
измеритель высоты ИВ 2 получает первичную оценку высоты воздушного судна  как минимальную дальность до разрешаемых элементов ДДП, мощность отраженного сигнала от которых превышает порог обнаружения. Значение с выхода ИВ 2 поступает на вторые входы первого вычислителя кривой максимального контраста (ВКМК1) 3 и вычислителя угла сноса (ВУС) 12 в виде номера канала дальности, соответствующего оценке высоты ВС
как минимальную дальность до разрешаемых элементов ДДП, мощность отраженного сигнала от которых превышает порог обнаружения. Значение с выхода ИВ 2 поступает на вторые входы первого вычислителя кривой максимального контраста (ВКМК1) 3 и вычислителя угла сноса (ВУС) 12 в виде номера канала дальности, соответствующего оценке высоты ВС
где int>{.} - операция округления до большего целого.
По ДДП сцены  первый и второй вычислители кривых максимального контраста (ВКМК1) 3 и (ВКМК2) 4, формируют соответствующие средневзвешенные вектора максимального контраста
первый и второй вычислители кривых максимального контраста (ВКМК1) 3 и (ВКМК2) 4, формируют соответствующие средневзвешенные вектора максимального контраста  координаты которых соответствуют дальностям точек кривой максимального контраста в развертке по доплеровской частоте kF.
координаты которых соответствуют дальностям точек кривой максимального контраста в развертке по доплеровской частоте kF.
Структура ВКМК2 4 аналогична структуре ВКМК1 3. Блок-схема вычислителя кривой максимального контракта ВКМК приведена на фиг.6. Вычисление соответствующих средневзвешенных векторов максимального контраста  происходит в следующей последовательности.
происходит в следующей последовательности.
По ДДП  поступившему на вход ВКМК, первый вычислитель дисперсии шума (ВДШ1) 16 и первый вычислитель дисперсии сигнала с шумом (ВДСШ1) 17 повыражениям (2) вычисляют дисперсию шума
поступившему на вход ВКМК, первый вычислитель дисперсии шума (ВДШ1) 16 и первый вычислитель дисперсии сигнала с шумом (ВДСШ1) 17 повыражениям (2) вычисляют дисперсию шума  и сигнала с шумом
и сигнала с шумом  Далее первый вычислитель положения скачка дисперсии (ВПСД1) 14 перебором гипотез доплеровской частоты kF на каждой дальности и находит положения скачков дисперсии эхо сигнала на разрешаемых элементах ДДП nocj(kF). Критерием оценки является максимум логарифма правдоподобия
Далее первый вычислитель положения скачка дисперсии (ВПСД1) 14 перебором гипотез доплеровской частоты kF на каждой дальности и находит положения скачков дисперсии эхо сигнала на разрешаемых элементах ДДП nocj(kF). Критерием оценки является максимум логарифма правдоподобия  рассчитываемого по выражению (3). По положениям скачков дисперсии эхо сигнала nocj(kF) формирователь матрицы А (ФМА) 20 формирует матрицу Aj с координатами (n, kF). Элементам, соответствующим положению скачка дисперсии сигнала ДДП на дальности nос, присваивается значение «1», остальным элементам - «0». Далее заменяет значения элементов матрицы Aj, у которых координата дальности n∈[nh, nh+3], на «0».
рассчитываемого по выражению (3). По положениям скачков дисперсии эхо сигнала nocj(kF) формирователь матрицы А (ФМА) 20 формирует матрицу Aj с координатами (n, kF). Элементам, соответствующим положению скачка дисперсии сигнала ДДП на дальности nос, присваивается значение «1», остальным элементам - «0». Далее заменяет значения элементов матрицы Aj, у которых координата дальности n∈[nh, nh+3], на «0».
Положение скачков дисперсии эхо сигнала на разрешаемых элементах ДДП по другому критерию обнаруживают на каждой дальности п на двух частотах kF1(n) и kF2(n). Для этого по ДДП  ВДШ2 18 и ВДСШ2 19 по выражениям (4) находят соответствующие дисперсии шума
ВДШ2 18 и ВДСШ2 19 по выражениям (4) находят соответствующие дисперсии шума  и сигнала с шумом
и сигнала с шумом  Перебором гипотез
Перебором гипотез  о значениях доплеровской частоты kF1(n) и kF2(n) ВПСД2 15 находят гипотезу, в которой логарифм функции правдоподобия
о значениях доплеровской частоты kF1(n) и kF2(n) ВПСД2 15 находят гипотезу, в которой логарифм функции правдоподобия  рассчитанный по выражению (5), максимальный, соответственно положения скачков дисперсии эхо сигнала на кривой максимального контраста.
рассчитанный по выражению (5), максимальный, соответственно положения скачков дисперсии эхо сигнала на кривой максимального контраста.
По положениям скачков дисперсии эхо сигнала формирователь матрицы В (ФМВ) 22 формирует матрицу Bj с координатами (n, kF). Элементам, соответствующим положению скачка дисперсии сигнала ДДП на частотах kF1(n) и kF2(n), присваивается значение «1», остальным элементам - «0».
Суммированием матриц Aj и Bj формирователь матрицы С ФМС 21 по выражению (6) получает матрицу Cj. Корректором матрицы С (KMC) (23) корректируют каждый элемент матрицы Cj через формирование матриц Gp размером 3×3 по выражению (7) и замену значения Cj(n, kF) в матрице Cj на «0», если сумма всех элементов Gp равна 1.
По скорректированной матрице Cj формирователь вектора кривой максимального контраста (ФВКМК) 24 формирует вектор  по выражению (8), являющийся выходом блока ВКМК.
по выражению (8), являющийся выходом блока ВКМК.
Блоки ВГКМК 8, ВСО 9, ВВМ 10 и ВКВС 11 на фиг. 5 являются составными частями фильтра оценки вектора состояния X=[Н, Vп, Vв]T. Фильтр по результатам сравнения наблюдаемого вектора кривой максимального контраста  с вектор-гипотезами кривых максимального контраста
с вектор-гипотезами кривых максимального контраста  рассчитанными для гипотез высотно-скоростных параметров ВС Xi=[Hi, Vпi, Vвi]T, находит оценку вектора состояния X.
рассчитанными для гипотез высотно-скоростных параметров ВС Xi=[Hi, Vпi, Vвi]T, находит оценку вектора состояния X.
На вычислитель координат вектора состояния (ВКВС) 11 с ИВ 2 приходит измеренная высота ВС nh и вектор-сигнал ошибки  с вычислителя сигнала ошибки (ВСО) 9.
с вычислителя сигнала ошибки (ВСО) 9.
Вектор-гипотеза кривой максимального контраста  формируется вычислителем гипотезы вектора кривой максимального контраста (ВГКМК) 8 и поступает на второй вход ВСО 9. Значение
формируется вычислителем гипотезы вектора кривой максимального контраста (ВГКМК) 8 и поступает на второй вход ВСО 9. Значение  рассчитывается по выражениям (9) и (10) по данным текущего вектора состояния Xi=[Hi, Vпi, Vвi]T, формируемого ВКВС 11. Формирование новой i+1 гипотезы о высотно-скоростных параметрах ВС Xi+1 производится ВКВС 11 по выражениям (12) и (13)
рассчитывается по выражениям (9) и (10) по данным текущего вектора состояния Xi=[Hi, Vпi, Vвi]T, формируемого ВКВС 11. Формирование новой i+1 гипотезы о высотно-скоростных параметрах ВС Xi+1 производится ВКВС 11 по выражениям (12) и (13)

в котором значение весовой матрицы Wi рассчитывается вычислителем весовой матрицы (ВВМ) (8) на основании предшествующего вектора состояния Xi по выражениям

где ϕ - априорно известная корреляционная матрица шумов измерения дальностей. При снижении ошибок ΔXi до допустимых значений начнется слежение за измеряемыми параметрами  с выдачей сигнала захват с второго выхода ВКВС 11 на третий вход ФРИ 13.
с выдачей сигнала захват с второго выхода ВКВС 11 на третий вход ФРИ 13.
Вычислитель угла сноса (ВУС) 12 выполняет расчеты по вычислению угла сноса по данным текущих оценок вектора кривой максимального контраста
по данным текущих оценок вектора кривой максимального контраста  высоты ВС
высоты ВС  ДДП
ДДП  поступающих на его с первого по четвертый входы. Вычисления выполняются по выражениям (14), (15), (16), (17) для точек ДДП с координатами (nсв, kF).
поступающих на его с первого по четвертый входы. Вычисления выполняются по выражениям (14), (15), (16), (17) для точек ДДП с координатами (nсв, kF).
Формирователь результатов измерения (ФРИ) 13 по текущим оценкам вектора состояния  и углов сноса
и углов сноса  при наличии сигнала «захват» на третьем входе вычисляет оценки составляющих путевой скорости
при наличии сигнала «захват» на третьем входе вычисляет оценки составляющих путевой скорости  по выражениям (18)
по выражениям (18)

формирует результирующий вектор высотно-скоростных параметров ВС
 - оценка высоты полета ВС и его вертикальная скорость, полученные на этапе итераций уточнения вектора оцениваемых параметров Xi:
- оценка высоты полета ВС и его вертикальная скорость, полученные на этапе итераций уточнения вектора оцениваемых параметров Xi:
и выдает потребителю оценки высоты и трех составляющих скорости ВС в режиме слежения.
Для оценки точности измерения высоты и составляющих скорости по сигналам двухканального когерентного радиовысотомера предлагаемым способом было проведено имитационное моделирование при следующих условиях: высота полета Н=500 м, путевая скорость Vп=250 м/с, разрешение радиовысотомера по дальности δr=1 м, время накопления T=50 мс, длина волны зондирующего сигнала λ=0.07 м, угол сноса α=10°, число элементов разрешения на КМК, сигнал от которых превышал порог обнаружения и был использован для оценки угла сноса и составляющих скорости ВС варьировался и находился в диапазоне 
По результатам моделирования, приведенных на фиг. 4, ошибка оценки угла сноса при k=100 составила σα=0.5°, что обеспечивает СКО оценок горизонтальных составляющих скорости ВС 
Для сравнения, современный ДИСС-Д002 [6] имеет среднеквадратические погрешности измерения в режимах суша/море: по путевой скорости ±0,3%/0,4%, по углу сноса ±0,2°/0,3°, что при этих условиях обеспечивает  При этом его масса 20 кг и соответствующие габариты.
При этом его масса 20 кг и соответствующие габариты.
Использование заявляемого способа, в отличие от известных измерителей высоты и скорости ВС, измеряет высоту и три составляющие скорости ВС с высокой точностью при сниженных габаритах антенной системы и меньшей длительности сеанса измерения. Связано это с тем, что для оценки всех измеряемых параметров используются не одиночный сигнал, отраженный разрешаемым элементом поверхности, а множество разрешаемых элементов, находящихся на КМК зондируемой поверхности.
Использование фазового суммарно-разностного метода измерения угла сноса и горизонтальных составляющих скорости ВС по сигналам, отраженным разрешаемыми элементами КМК, в ранее опубликованных научных статьях и известных технических решениях не обнаружено.
Предлагаемое устройство может быть изготовлено на базе существующей элементной базы и технологиях и применено для измерения высоты и трех составляющих скорости ВС.
ПРИЛОЖЕНИЕ
Оценка угла сноса
Антенные измерения линии максимального контраста относительно строительной оси ЛА β однозначно определяют угол сноса носителя αkF. Из геометрии фиг. 1 следует  Для малых углов αkF следует
Для малых углов αkF следует

при этом αkF≤30° ошибка аппроксимации <1°.
Следует отметить, что k-ый элемент разрешения кривой максимального контраста является протяженным объектом. Его размер определяется разрешением по азимуту. В свою очередь разрешение по азимуту при равномерном прямолинейном полете для переднего обзора определяется формулой [7, с. 165]
 - размер синтезированной апертуры.
- размер синтезированной апертуры.
Положение энергетического центра в k-м элементе разрешения кривой максимального контраста случайно и равновероятно любому угловому положению в пределах этого элемента разрешения  Следовательно, дисперсию углового положения энергетического центра для k-го элемента разрешения можно найти через выражение для случайной величины с равномерным распределением
Следовательно, дисперсию углового положения энергетического центра для k-го элемента разрешения можно найти через выражение для случайной величины с равномерным распределением  При этом СКО оценки угла сноса согласно (1) равно
При этом СКО оценки угла сноса согласно (1) равно  а дисперсия
а дисперсия

Ввиду того, что число элементов на кривой максимального контраста равно NkF=2(K-nh)+1, оценку угла сноса формируем по NkF вычисленным значениям угловых координат разрешаемых элементов КМК (βkF, γkF), сигнал от которых превышает порог обнаружения.
В предположении гауссовского характера распределения αkF за его оценку принимается математическое ожидание  которое определяется методом максимального правдоподобия. Функционал правдоподобия соответствует произведению плотностей вероятности каждой выборки
которое определяется методом максимального правдоподобия. Функционал правдоподобия соответствует произведению плотностей вероятности каждой выборки

где пределы операций перемножения  и суммирования
и суммирования  соответствуют всем элементам КМК, сигнал от которых превышает порог обнаружения.
соответствуют всем элементам КМК, сигнал от которых превышает порог обнаружения.
Функционал приобретает максимум при 

где 
Таким образом, результирующая оценка угла сноса представляет весовую сумму частных оценок αkF, соответствующих конкретному элементу разрешения.
Теперь с учетом (1) и (2) перепишем выражение (4) и получим результирующую оценку угла сноса

Литература:
1. Патент России №2498344. Корреляционный измеритель высоты и составляющих вектора путевой скорости.
2. Патент России №2550081. Способ однолучевого определения высоты и составляющих скорости летательного аппарата и устройство радиовысотомера, реализующего способ.
3. Патент России №2551896. Способ однолучевого определения высоты и составляющих скорости летательного аппарата и устройство радиовысотомера, реализующего способ.
4. Патент России №2782374. Способ однолучевого определения высотно-скоростных параметров воздушного судна по сигналам когерентного радиовысотомера.
5. Тихонов В.И. Статистическая радиотехника, м: Советское радио, 1966. 681 с.
6. https://zrp.ru/production/samoletnye-diss/doplerovskiy-izmeritel-skorosti-i-snosa-samoletn vv-diss-d002/
7. Авиационные системы радиовидения. Монография / Под ред. Г.С. Кондратенкова. - М.: Радиотехника, 2015.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОДНОЛУЧЕВОГО ОПРЕДЕЛЕНИЯ ВЫСОТНО-СКОРОСТНЫХ ПАРАМЕТРОВ ВОЗДУШНОГО СУДНА ПО СИГНАЛАМ КОГЕРЕНТНОГО РАДИОВЫСОТОМЕРА | 2021 |
|
RU2782374C1 |
| СПОСОБ ОДНОЛУЧЕВОГО ИЗМЕРЕНИЯ ВЫСОТЫ И СОСТАВЛЯЮЩИХ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2013 |
|
RU2551896C2 |
| СПОСОБ ОДНОЛУЧЕВОГО ИЗМЕРЕНИЯ ВЫСОТЫ И СОСТАВЛЯЮЩИХ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2013 |
|
RU2550081C2 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ, ИСТИННОЙ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И НАКЛОНА ВЕКТОРА СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ГОРИЗОНТА, УСТРОЙСТВО БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ, ИСПОЛЬЗУЮЩЕЕ СПОСОБ | 2016 |
|
RU2643168C2 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ И УСТРОЙСТВО РАДИОВЫСОТОМЕРА С НЕПРЕРЫВНЫМ ЛЧМ СИГНАЛОМ, ИСПОЛЬЗУЮЩЕГО СПОСОБ | 2013 |
|
RU2550082C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ И РАДИОВЫСОТОМЕР С НЕПРЕРЫВНЫМ ЛЧМ СИГНАЛОМ, ИСПОЛЬЗУЮЩИЙ СПОСОБ | 2013 |
|
RU2552515C2 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ И РАДИОВЫСОТОМЕР С НЕПРЕРЫВНЫМ ЛЧМ СИГНАЛОМ, ИСПОЛЬЗУЮЩИЙ СПОСОБ | 2013 |
|
RU2555865C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОШИБКИ ИЗМЕРЕНИЯ СКОРОСТИ ЛА ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМОЙ И БОРТОВОЙ НАВИГАЦИОННЫЙ КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2411538C2 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА НАЗЕМНЫЕ ЦЕЛИ ПО ДАННЫМ РАДИОЛОКАТОРА С СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ АНТЕННЫ | 2021 |
|
RU2773672C1 |
| СПОСОБ НЕКОГЕРЕНТНОГО ЭКСТРЕМАЛЬНОГО НАКОПЛЕНИЯ-ОБНАРУЖЕНИЯ СИГНАЛА В ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РЛС | 2019 |
|
RU2694809C1 |
Изобретение относится к радионавигации и может быть использовано для измерения высоты и составляющих скорости воздушного судна (ВС). Техническим результатом является измерение высоты и трех составляющих скорости ВС по сигналам двухканального когерентного радиовысотомера (РВ) при сниженных габаритах антенной системы. Заявленный способ включает в себя зондирование земной поверхности радиолокационным сигналом через широко направленную приемопередающую антенну (ППА); одновременный прием эхо-сигнала двумя антеннами: ППА и приемной широко направленной (ПА) когерентного радиовысотомера, разнесенных вдоль оси Z в связанной с ВС системе координат на базу интерферометр, равную длине волны источника излучения, ось Z расположена перпендикулярно продольной оси ВС в сторону правого крыла. Далее проводят формирование двух комплексных дальность-доплеровских портретов (ДДП) по принятым ПА1 и ПА2 сигналам. Формируют для каждого ДДП две кривые максимального контраста (КМК), первую кривую получают перебором гипотез по доплеровской частоте на каждой дальности n, вторую кривую - перебором гипотез по паре доплеровских частот на каждой дальности n, дающих максимум логарифма правдоподобия. Формируют вектора максимального контраста по результатам комбинирования первых и вторых КМК и алгоритма уточнения. Вычисляют вектор средневзвешенных координат КМК эхо-сигнала. Формируют гипотезы о высотно-скоростных параметрах ВС  , где
, где 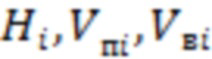 - высота, путевая и вертикальная скорости ВС для i-той гипотезы. Формируют векторы
- высота, путевая и вертикальная скорости ВС для i-той гипотезы. Формируют векторы  описывающие кривые максимального контраста для i-той гипотезы. Находят методом наименьших квадратов оптимальную оценку ошибки вектора
описывающие кривые максимального контраста для i-той гипотезы. Находят методом наименьших квадратов оптимальную оценку ошибки вектора  относительно истинного значения и формируют новые i+1 гипотезы
относительно истинного значения и формируют новые i+1 гипотезы  . Затем повторяют итерации уточнения параметров вектора до снижения вектора ошибки до допустимых значений. Далее для каждой координаты вектора средневзвешенных координат кривой максимального контраста эхо-сигнала по двум комплексным ДДП определяют угловые координаты каждого разрешаемого элемента КМК, вычисляют взвешенную оценку угла сноса ВС по всем полярным координатам разрешаемых элементов КМК, вычисляют оценку продольной и поперечной составляющих скорости ВС согласно выражениям, связывающих измеренную путевую скорость с углом сноса. 2 н.п. ф-лы, 6 ил., 1 прил.
. Затем повторяют итерации уточнения параметров вектора до снижения вектора ошибки до допустимых значений. Далее для каждой координаты вектора средневзвешенных координат кривой максимального контраста эхо-сигнала по двум комплексным ДДП определяют угловые координаты каждого разрешаемого элемента КМК, вычисляют взвешенную оценку угла сноса ВС по всем полярным координатам разрешаемых элементов КМК, вычисляют оценку продольной и поперечной составляющих скорости ВС согласно выражениям, связывающих измеренную путевую скорость с углом сноса. 2 н.п. ф-лы, 6 ил., 1 прил.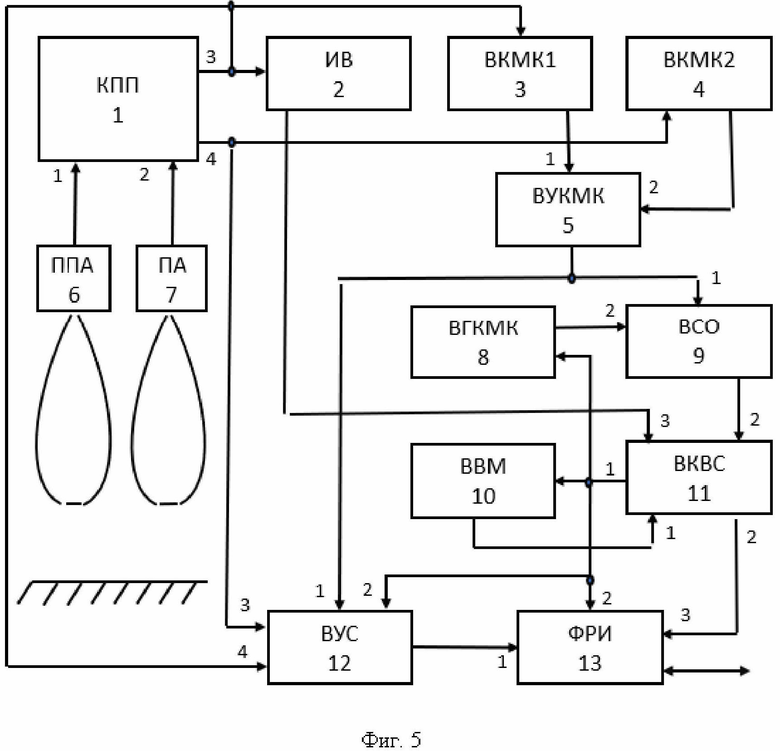
1. Способ измерения высоты и составляющих скорости воздушного судна по сигналам двухканального когерентного радиовысотомера, включающий вертикальное излучение зондирующего сигнала радиовысотомера (РВ), когерентный прием эхо-сигнала с вертикально ориентированной широко направленной антенны и получение двумерного дальность-доплеровского портрета (ДДП) облучаемой местности  получение первичной оценки высоты ВС (воздушного судна)
получение первичной оценки высоты ВС (воздушного судна)  как минимальной, усредненной по нескольким измерениям дальности до разрешаемых элементов ДДП, мощность отраженного сигнала от которых превышает порог обнаружения, определение номера канала дальности, соответствующего оценке высоты ВС
как минимальной, усредненной по нескольким измерениям дальности до разрешаемых элементов ДДП, мощность отраженного сигнала от которых превышает порог обнаружения, определение номера канала дальности, соответствующего оценке высоты ВС
где δR - разрешение радиовысотомера ВС по дальности,
 - операция округления числа до ближайшего большего целого;
- операция округления числа до ближайшего большего целого;
формирование вектора  максимального контраста, соответствующего принятому приемной антенной ДДП облучаемой местности
максимального контраста, соответствующего принятому приемной антенной ДДП облучаемой местности  ;
;
формирование гипотез о высотно-скоростных параметрах ВС  , где
, где  – высота, путевая и вертикальная скорости ВС для i-той гипотезы, для исходной гипотезы
– высота, путевая и вертикальная скорости ВС для i-той гипотезы, для исходной гипотезы  значение высоты
значение высоты  берется равным
берется равным  , в качестве значений путевой
, в качестве значений путевой  и вертикальной
и вертикальной  составляющих скорости ВС берутся соответствующие центральные значения априорно известных окон;
составляющих скорости ВС берутся соответствующие центральные значения априорно известных окон;
вычисление для гипотезы вектора состояния ВС  дальностей ВС до точек кривой максимального контраста
дальностей ВС до точек кривой максимального контраста  (
( ,
,  )
)

где  ;
;
в расчетах  берут точки кривой максимального контраста, находящиеся в диапазоне дальностей от первичной оценки канала высоты
берут точки кривой максимального контраста, находящиеся в диапазоне дальностей от первичной оценки канала высоты  2
2 до положения максимально удаленной точки ДДП
до положения максимально удаленной точки ДДП  , амплитуда которой превышает порог обнаружения;
, амплитуда которой превышает порог обнаружения;
формирование векторов  описывающих кривые максимального контраста для i-той гипотезы
описывающих кривые максимального контраста для i-той гипотезы
 ;
;
вычисление матрицы-якобиана  (
( ) i-той гипотезы преобразованием вектора
) i-той гипотезы преобразованием вектора  размером
размером  для каждого канала частоты
для каждого канала частоты
нахождение методом наименьших квадратов оптимальной оценки ошибки  вектора
вектора  относительно истинного значения;
относительно истинного значения;
формирование новой  гипотезы о высотно-скоростных параметрах ВС согласно выражению
гипотезы о высотно-скоростных параметрах ВС согласно выражению

повторение итераций уточнения вектора оцениваемых параметров  до снижения вектора ошибки
до снижения вектора ошибки  до допустимых значений;
до допустимых значений;
формирование вектора максимального контраста, соответствующего ДДП  выполняют в последовательности:
выполняют в последовательности:
определяют дисперсию шума  и сигнала с шумом
и сигнала с шумом  в каждом разрешаемом элементе ДДП
в каждом разрешаемом элементе ДДП  (
( , исходя из гипотезы о положении скачка мощности сигнала на дальности
, исходя из гипотезы о положении скачка мощности сигнала на дальности 
 длина реализации участка ДДП, выраженная в числе разрешаемых элементов дальности δR, соответствующая максимальной дальности, на которой
длина реализации участка ДДП, выраженная в числе разрешаемых элементов дальности δR, соответствующая максимальной дальности, на которой  порога обнаружения,
порога обнаружения,
 – полоса селектируемых доплеровских частот, выраженная в числе разрешаемых по частоте элементов ДДП δF;
– полоса селектируемых доплеровских частот, выраженная в числе разрешаемых по частоте элементов ДДП δF;
вычисляют логарифм функции правдоподобия  принятой огибающей амплитуды отраженного сигнала
принятой огибающей амплитуды отраженного сигнала  по доплеровской частоте , согласно выражению
по доплеровской частоте , согласно выражению
 ;
;
находят положения скачка дисперсии эхо-сигнала  для разрешаемых элементов ДДП
для разрешаемых элементов ДДП  по доплеровской частоте по гипотезе, дающей максимум логарифма функции правдоподобия
по доплеровской частоте по гипотезе, дающей максимум логарифма функции правдоподобия  ;
;
формируют нулевую матрицу  из K строк и N столбцов, где индекс строки равен индексу канала дальности n, индекс столбца равен индексу доплеровского фильтра ;
из K строк и N столбцов, где индекс строки равен индексу канала дальности n, индекс столбца равен индексу доплеровского фильтра ;
заменяют значения элемента матрицы с координатами  соответствующим положению скачка дисперсии сигнала ДДП на дальности
соответствующим положению скачка дисперсии сигнала ДДП на дальности  , на «1»;
, на «1»;
заменяют значения элементов матрицы , у которых координата дальности  , на «0»;
, на «0»;
вычисляют дисперсии шума  и сигнала с шумом
и сигнала с шумом  согласно выражению
согласно выражению
где  и
и  – доплеровские частоты отсчетов ДДП в каждом канале дальности n, где наблюдается скачок мощности сигнала, N – количество доплеровских частот;
– доплеровские частоты отсчетов ДДП в каждом канале дальности n, где наблюдается скачок мощности сигнала, N – количество доплеровских частот;
находят положения скачков дисперсии эхо-сигнала  и
и  для разрешаемых элементов ДДП по дальности n по гипотезе, дающей максимум логарифма функции правдоподобия
для разрешаемых элементов ДДП по дальности n по гипотезе, дающей максимум логарифма функции правдоподобия 

формируют нулевую матрицу  из K строк и N столбцов, где индекс строки равен индексу канала дальности n, индекс столбца равен индексу доплеровского фильтра ;
из K строк и N столбцов, где индекс строки равен индексу канала дальности n, индекс столбца равен индексу доплеровского фильтра ;
заменяют значения элемента матрицы  с координатами на «1» на частотах
с координатами на «1» на частотах  ;
;
формируют матрицу  ;
;
формируют для каждого элемента матрицы  с координатами квадратную матрицу
с координатами квадратную матрицу 


где  ;
;
рассчитывают сумму всех элементов  , если сумма равна 1, значение
, если сумма равна 1, значение  в матрице
в матрице  заменяют «0»;
заменяют «0»;
определяют каналы дальности, соответствующие скачку дисперсии эхо-сигнала  по первой координате ненулевых элементов матрицы ;
по первой координате ненулевых элементов матрицы ;
формируют вектор , описывающий координату дальности кривой максимального контраста наблюдаемого ДДП с приемной антенны когерентного радиовысотомера
 ;
;
отличающийся тем, что эхо-сигнал дополнительно когерентно принимается второй вертикально ориентированной широко направленной приемной антенной, по которому параллельно получают второй двумерный ДДП местности  , обе антенны образуют интерферометр, база которого L ориентирована вдоль оси Z в связанной с воздушным судном (ВС) системе координат и равна длине волны зондирующего сигнала
, обе антенны образуют интерферометр, база которого L ориентирована вдоль оси Z в связанной с воздушным судном (ВС) системе координат и равна длине волны зондирующего сигнала  , ось Z расположена перпендикулярно продольной оси ВС в сторону правого крыла,
, ось Z расположена перпендикулярно продольной оси ВС в сторону правого крыла,
формируют вектор  кривой максимального контраста, соответствующего ДДП
кривой максимального контраста, соответствующего ДДП  , аналогично вектору ;
, аналогично вектору ;
вычисляют вектор  - средневзвешенных координат кривой максимального контраста эхо-сигнала по формуле
- средневзвешенных координат кривой максимального контраста эхо-сигнала по формуле

где  - операция округления координат вектора до ближайших целых значений;
- операция округления координат вектора до ближайших целых значений;
вычисляют оптимальную оценку ошибки вектора состояния = по формуле
по формуле
где  – корреляционная матрица шумов измерения дальностей
– корреляционная матрица шумов измерения дальностей  размерностью
размерностью  ;
;
далее определяют угол сноса  и составляющие вектора путевой скорости
и составляющие вектора путевой скорости  в последовательности:
в последовательности:
вычисляют методом фазовой суммарно-разностной моноимпульсной пеленгации углы пеленга  разрешаемых элементов поверхности на кривой максимального контраста
разрешаемых элементов поверхности на кривой максимального контраста отсчитанные от плоскости, ортогональной базе интерферометра
отсчитанные от плоскости, ортогональной базе интерферометра  параллельной оси Z ВС, по выражениям
параллельной оси Z ВС, по выражениям
где  - длина волны зондирующего сигнала радиовысотомера;
- длина волны зондирующего сигнала радиовысотомера;
вычисляют оценку угла сноса ВС  , по данным расчетов углов пеленга
, по данным расчетов углов пеленга  и углов места
и углов места  точек кривой максимального контраста
точек кривой максимального контраста  по выражению
по выражению
где  - угол места разрешаемого элемента на кривой максимального контраста;
- угол места разрешаемого элемента на кривой максимального контраста;
вычисляют оценки составляющих путевой скорости (
 )
)

формируют результирующий вектор высотно-скоростных параметров ВС  , где
, где  – оценка высоты полета ВС и его вертикальная скорость, полученные на этапе итераций уточнения вектора оцениваемых параметров ;
– оценка высоты полета ВС и его вертикальная скорость, полученные на этапе итераций уточнения вектора оцениваемых параметров ;
переходят в режим слежения за параметрами в когерентном радиовысотомере и выдают потребителю оценки высоты и трех составляющих скорости ВС в режиме слежения.
2. Устройство измерения высоты и составляющих скорости по сигналам двухканального когерентного радиовысотомера, реализующее способ по п.1, содержащее последовательно соединенные когерентный приемопередатчик, первый вычислитель кривой максимального контраста, вычислитель усредненной кривой максимального контраста, вычислитель угла сноса и формирователь результата измерений, выход вычислителя усредненной кривой максимального контраста через вычислитель сигнала ошибки соединен с вторым входом вычислителя координат вектора состояния, первый выход вычислителя координат вектора состояния соединен с входом вычислителя гипотез кривой максимального контраста, вторым входом вычислителя угла сноса, входом вычислителя весовой матрицы и вторым входом формирователя результата измерений, второй выход вычислителя координат вектора состояния соединен с третьим входом формирователя результата измерений, четвертый выход когерентного приемо-передатчика через второй вычислитель кривой максимального контраста соединен с вторым входом вычислителя усредненной кривой максимального контраста, третий выход когерентного приемо-передатчика через измеритель высоты соединен с третьим входом вычислителя координат вектора состояния, четвертый выход когерентного приемо-передатчика соединен с третьим входом вычислителя угла сноса, третий выход когерентного приемо-передатчика соединен с четвертым входом вычислителя угла сноса, выход вычислителя весовой матрицы соединен с первым входом вычислителя координат вектора состояния, первый вход когерентного приемо-передатчика соединен с выходом приемопередающей антенны, второй вход когерентного приемо-передатчика соединен с выходом приемной антенны, первый и второй вычислитель кривой максимального контраста содержат последовательно соединенные первый вычислитель дисперсии шума, первый вычислитель положения скачка дисперсии, формирователь матрицы А положения скачка дисперсии сигнала ДДП по дальности, формирователь суммарной матрицы С положения скачка дисперсии сигнала ДДП по дальности и частоте, корректор матрицы С и формирователь вектора кривой максимального контраста, выход которого является выходом блока, последовательно соединенные второй вычислитель дисперсии шума, второй вычислитель положения скачка дисперсии и формирователь матрицы В положения скачка дисперсии сигнала ДДП по частоте, выход которого подключен к второму входу формирователя суммарной матрицы С положения скачка дисперсии сигнала ДДП по дальности и частоте, выход первого вычислителя дисперсии сигнала с шумом соединен с вторым входом первого вычислителя положения скачка дисперсии, выход второго вычислителя дисперсии сигнала с шумом соединен с вторым входом второго вычислителя положения скачка дисперсии, вход вычислителя кривой максимального контраста соединен с входами первого вычислителя дисперсии шумом, первого вычислителя дисперсии сигнала с шумом, второго вычислителя дисперсии шума и второго вычислителя дисперсии сигнала с шумом.
| СПОСОБ ОДНОЛУЧЕВОГО ОПРЕДЕЛЕНИЯ ВЫСОТНО-СКОРОСТНЫХ ПАРАМЕТРОВ ВОЗДУШНОГО СУДНА ПО СИГНАЛАМ КОГЕРЕНТНОГО РАДИОВЫСОТОМЕРА | 2021 |
|
RU2782374C1 |
| RU 2775154 C1, 29.06.2022 | |||
| СПОСОБ ОДНОЛУЧЕВОГО ИЗМЕРЕНИЯ ВЫСОТЫ И СОСТАВЛЯЮЩИХ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2013 |
|
RU2551896C2 |
| СПОСОБ ОЦЕНКИ ВЫСОТЫ ПОЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННЫМ ИЗОБРАЖЕНИЯМ ЗЕМНОЙ ПОВЕРХНОСТИ | 2012 |
|
RU2499279C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННОМУ ИЗОБРАЖЕНИЮ | 2017 |
|
RU2656366C1 |
| БУЛАНОВ В.А., МУСАЛЛАМ М., ИВАНОВ С.Л., ТРУЩИНСКИЙ А.Ю | |||
| Применение спектрального анализа сигнала когерентного радиовысотомера для обеспечения навигации воздушного судна // Электромагнитные волны и электронные | |||

