Изобретение относится к телевизионным системам автоматического управления и может быть использовано при наблюдении и слежении за приближающимися или удаляющимися объектами.
Целью изобретения является уменьшение времени слежения.
На фиг. 1 представлена структурная блок-схема телевизионного следящего устройства; на фиг. 2 - форма исходного изображения в стробе телевизионного и машинного кадров; на фиг. 3 - функциональная схема блока измерения размеров объекта (БИР); на фиг. 4 - функциональная схема формирователя строба (ФС); на фиг. 5 - функциональная схема блока вычисления коэффициента масштабирования (БВКМ); на фиг. 6 - функциональная схема вычислителя сигнала суммы элементов по кадру и строке (ВСЭК) и (СЭС); на фиг. 7 - функциональная схема управляемого блока задержки, используемого в ВСЭК и ВСЭС; на фиг, 8 - функциональная схема формирователя импульсов записи (ФИЗ= ; на фиг. 9 - вариант алгоритма работы координатора.
Телевизионное следящее устройство содержит телевизионную передающую камеру 1, аналого-цифровой преобразователь (АЦП) 2, ключ 3, блок 4 измерения размеров объекта (БИРО), формирователь строба (ФС) 5, блок 6 вычисления коэффициентов масштабирования (БВКМ), вычислитель 7 сигнала суммы элементов по кадру (ВСЭК), вычислитель 8 сигнала суммы элементов по строке (ВСЭС), формирователь 9 импульсов записи (ФИЗ), блок 10 регистров и блок 11 вычисления координат объекта (БВК).
Блок измерения размеров объекта содержит пороговый элемент 12, элемент 3И 13, первый счетчик 14, первый регистр 15, элемент 2И 16, второй счетчик 17, второй регистр 18, генератор 19 тактовых импульсов (ГТИ), формирователь 20 импульсов и элемент 21 задержки.
Формирователь строба содержит два реверсивных счетчика 22 и 23, два компаратора 24 и 25, два регистра 26 и 27, два коммутатора 28 и 29, два умножителя 30 и 31, два блока опорной кодовой комбинации 32 и 33, два блока установки коэффициентов преобразования 34 и 35, два дешифратора нуля 36 и 37, элемент 2ИЛИ 38, элемент 2И 39, ГТИ 40.
Блок вычисления коэффициентов масштабирования содержит умножитель 41, компаратор 42, формирователь 43 опорной кодовой комбинации, делитель 44, арифметический блок 45 и коммутатор 46.
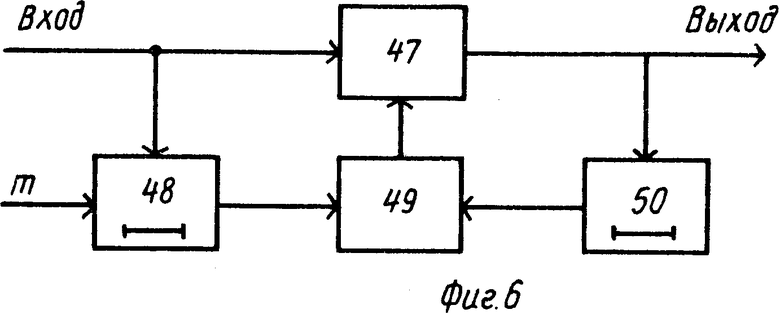
Блоки ВСЭК и ВСЭС содержат сумматор 47, управляемый блок 48 задержки, блок 49 вычисления и блок 50 задержки.
Управляемый блок задержки содержит входной 51 и выходной 52 регистры, два блока оперативной памяти (БОП) 53 и 54, ГТИ 55, блок 56 стробирования, формирователи импульсов режиме 57 и адреса 58, адресный регистр 59 и элемент НЕ 60.
Формирователь импульсов записи содержит два блока выделения переднего фронта сигнала 61 и 62, два делителя 63 и 64, два элемента 2И 65 и 66, ГТИ 67 и блок 68 выделения заднего фронта сигнала.
Устройство работает следующим образом.
В начальный момент времени оператором или автоматически осуществляется поиск объекта наблюдения. После обнаружения объекта осуществляется наведение системы на объект, т. е. приведение объекта наблюдения к центру растра, в зависимости от размера наблюдаемого объекта задаются начальные размеры строба РстрX, РстрY. После этого система переходит в автоматический режим сопровождения.
Оптический сигнал от наблюдаемых объектов преобразуется телевизионной передающей камерой 1 в электрический сигнал. С выхода ТВ-камеры 1 аналоговый сигнал поступает в контроллер связи для преобразования в цифровую форму и предварительной обработки и согласования с БВК 11. Структура контроллера связи определяет аппаратные затраты при заданной производительности алгоритмов обработки в БВК 11. Это обосновано различной скоростью поступления информации от телевизионной передающей камеры, потребления ее ЭВМ и необходимостью сокращения объема вводимой в ЭВИ информации и, следовательно, повышения быстродействия телевизионного следящего устройства.
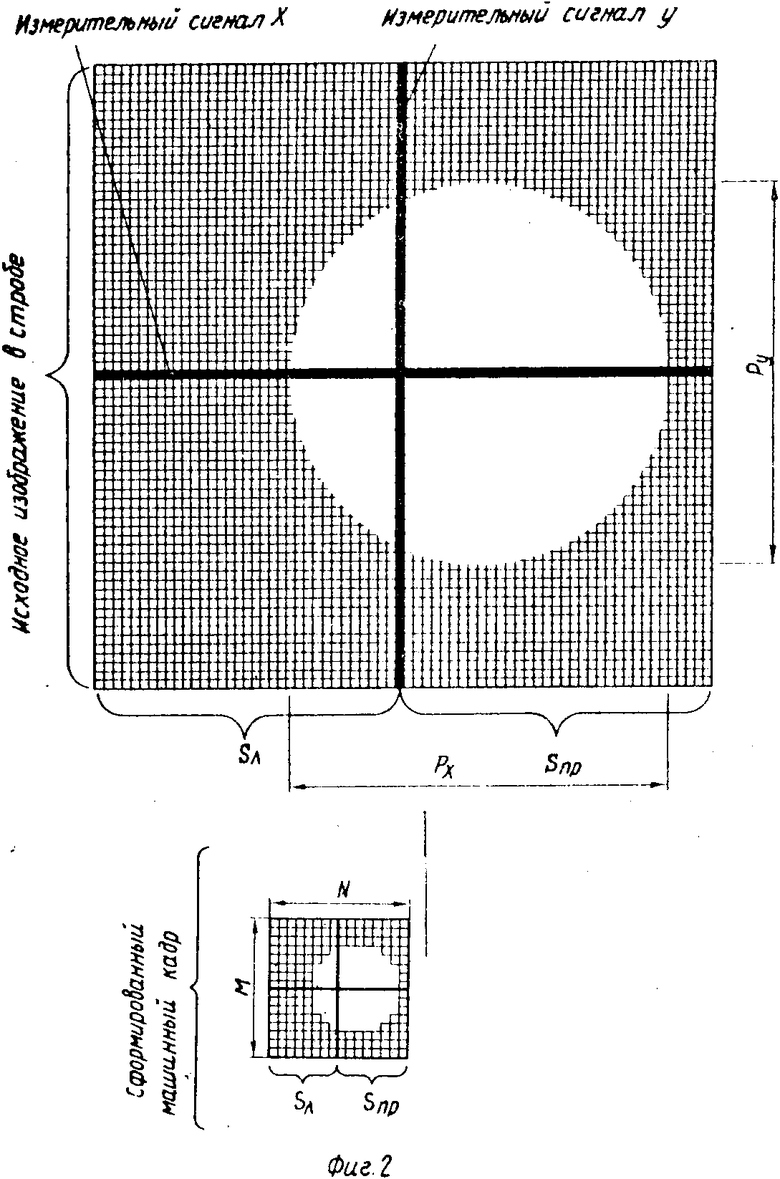
Сигнал с выхода АЦП 2 через ключ 3, управляемый сигналом "Строб" поступает в блок 4 измерения размеров объекта и одновременно на вход последовательно соединенных ВСЭК 7 и ВСЭС 8. В блоке 4 с помощью измерительных импульсов, поступающих от ФС 5 и представляющих собой перекрестие расположенного в центре строба ( (см. фиг. 2), осуществляется измерение размеров Рох, РоY, объекта. За размер объекта принимается часть измерительного импульса, совпадающая с сигналом от объекта. Размер в виде цифрового кода поступает в формирователь 5 строба, в котором формируется сигнал строба, который поступает на управляющий вход ключа 3 и позволяет уменьшить зону наблюдения за объектом. Размер строба определяется соотношением Рстр = а˙Ро, где а - коэффициент преобразования. Так в процессе слежения изменяются размеры объекта, существенно изменяется количество информации, которое должно быть обработано в БВК 11 для определения координат объекта, его скорости и траектории.
В управляемых ВСЭК и ВСЭС 8 осуществляется сжатие простробированного участка исходного изображения (см. фиг. 2) в стандартный машинный кадр. Размеры машинного кадра выбираются из требований на быстродействие устройства и возможностей вычисления. Последовательно включенные ВСЭК 7 и ВСЭС 8 позволяют получить текущую сумму отсчетов апертуры МxN элементов. Управление ВСЭК 7 и ВСЭС 8, с целью измерения размеров апертуры осуществляется кодом коэффициента преобразования масштаба m, поступающего на их управляющие входы из блока 6 вычисления коэффициентов масштабирования, на вход которого поступает код размера строба Рстр. При формировании массива информации для ввода в БВК 11 необходимо выполнить операцию компрессии частоты дискретизации в строчном и кадровом направлениях, которая выполняется с помощью формирователя 9 импульсов записи, который формирует сигналы управления блоком 10 регистров, на информационные входы которого поступают данные (отфильтрованные низкочастотным фильтром) с выхода ВСЭС 8 и коэффициент преобразования масштаба m с блока 6 вычисления коэффициентов масштабирования.
С выхода блока 10 регистров информация поступает в БИК 11, в котором осуществляется вычисление координат и параметров движения наблюдаемого объекта. Алгоритм работы вычислителя может меняться в зависимости от выполняемой задачи, параметров объекта и возможностей вычислителя.
На общей блок-схеме устройства (см. фиг. 1) не показан блок синхронизации, который соединен со всеми блоками устройства и обеспечивает их синхронную работу. При описании отдельных блоков в их состав, там где это требуется для лучшего понимания работы блоков, введены генераторы тактовых импульсов, которые вырабатывают все необходимые для этого блока синхросигналы. Естественно, что все генераторы работают синхронно.
Рассмотрим подробно работу и устройство отдельных узлов следящего устройства, АЦП 2 предназначен для преобразования аналогового телевизионного сигнала в цифровой параллельный код. Ключ 3 предназначен для стробирования цифрового телевизионного сигнала и построен на базе шести двухвходовых логических элементов И.
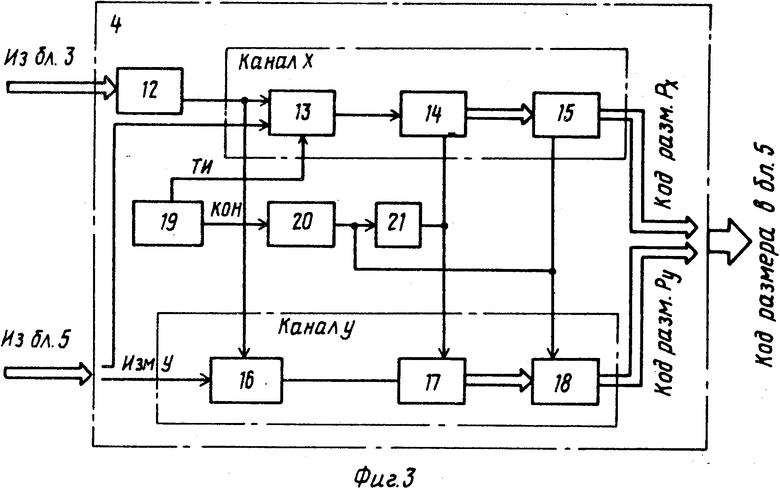
Блок 4 измерения размеров объекта предназначен для измерения линейных размеров объекта.
Входные сигналы: 1) шестиразрядный цифровой телевизионной сигнал; 2) измерительный сигнал (Изм. Х, Y).
Выходной сигнал: 1) код размеров объекта РОХ, РОY.
Рассмотрим работу блока 4 на примере канала Х. Пpи наведении строба на объект в пороговом элементе 12 происходит сравнение кода телевизионного сигнала в стробе с заданным порогом таким образом, что видеосигнал от объекта принимает значение "1", а от фона - "0". С помощью полученного бинарного сечения объекта (сигнала объекта) осуществляется измерение его линейных размеров.
В элементе 3И 13 происходит модуляция (заполнение) сигнала объекта, находящегося в стробе, измерительным сигналом (Изм. Х) импульсами тактовой частоты (ТИ). Число импульсов на выходе элемента 3И 13 таким образом оказывается пропорционально размеру объекта и подсчитывается счетчиком 14, а затем через регистр 15 поступает на выход БИРО 4. Измерение размера происходит заново в каждом кадре, что осуществляется сбросом счетчика 14 в "0" кадровыми синхроимпульсами через формирователь импульсов 20 и элемента 21 задержки. Формирователь 20 импульсов запускается передним фронтом кадрового синхроимпульса и выдает импульс длительностью, равной одному периоду строчной развертки. Элемент 21 задержки на одну сторону необходим для согласования моментов записи размера объекта в регистр 15 и обнуления счетчика 14. Таким образом один раз за кадр размер переписывается в регистр 15 и подается на вход. Кадровый канал выполнен аналогично. Код размеров объекта РОХ, РОY используется затем для установки необходимого размера строба в формирователе 5 строба и выбора коэффициента сжатия в блоке 6 вычисления коэффициентов масштабирования. Измеренные размеры объекта в каждом кадре поступают на выход блока 4.
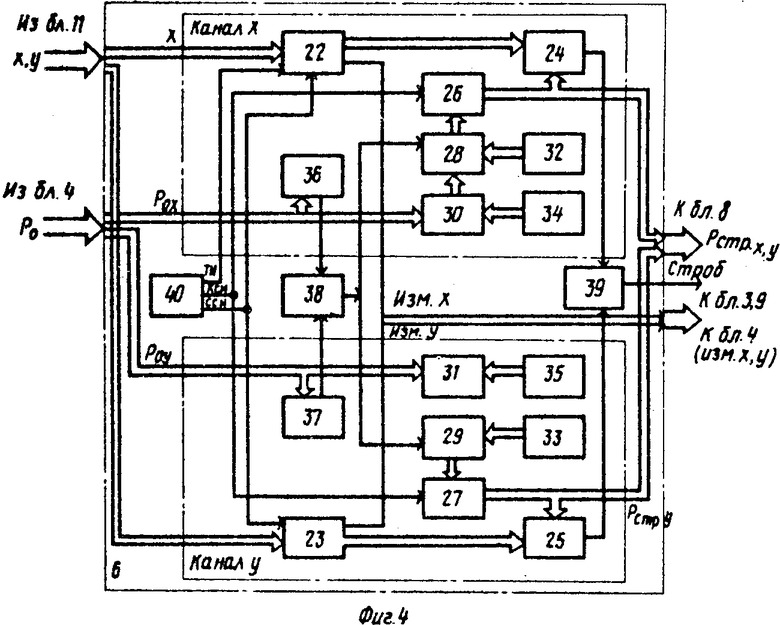
Формирователь 5 строба предназначен для формирования стробирующего сигнала (строба), позволяющего уменьшить поле наблюдения объекта в кадре, а также кода размеров строба РстрХ, РстрY. для работы схем сжатия изображения и измерительных импульсов для блока 4 измерения размеров объекта. Функциональная схема блока 5 приведена на фиг. 4. Формирователь строба состоит из двух идентичных каналов Х и Y, генератора тактовых импульсов и двух логических схем.
Входные сигналы: 1) код координат Х, Y; 2) код размеров объекта РОХ, РОY.
Выходные сигналы: 1) код размеров строба РстрХ, РстрY; 2) строб-импульс; 3) измерительный сигнал UизмХ,Y,
Рассмотрим работу формирователя 5 на примере канала Х. В начальный момент времени код размера объекта РОХ на входе формирователя равен нулю. Дешифратор нуля 36 (многовходовая схема И-НЕ) выдает логическую единицу и коммутатор 28 подключает блок 32 опорной кодовой комбинации РстрХ. В блоке 32 могут быть использованы наборы переключателей. В прямом ходе телевизионной строки реверсивный счетчик 22 начинает с заданного кода координаты Х считать тактовые импульсы ТИ до нуля. При переходе через нуль формируется измерительный импульс Х, подаваемый в блок 4. К входу записи реверсивного счетчика подключены строчные синхроимпульсы (ССИ) ГТИ 40 (для кадрового канала ССИ являются счетными импульсами, а кадровые СИ - (импульсами записи). Измерительный импульс Х является также переключающим импульсом направления счета, т. е. по достижении в реверсивном счетчике 22 кода, равного нулю, счетчик переходит в режим суммирования. Путем сравнения на компараторе 24 текущего значения реверсивного счетчика 22 с содержимым регистра 26 формируется строб Х.
Аналогично работает канал Y. На элементе 2И 39 из строба Х и строба Y формируется суммарный строб для стробирования видеосигнала. При срыве слежения с помощью элемента 2ИЛИ 38 формируется логический сигнал для переключения коммутаторов 28 и 29 в операторный режим. В автоматическом режиме слежения, когда из блока 4 на вход формирователя 5 поступает код размеров PОХ, РОY в умножителя 30 и 31 формируется код размеров строба.
РстрХ = а˙РОХ;
РстрY = b˙POY, где а, b - коэффициенты преобразования кода объекта в код строба.
Сформированный код размеров переписывается в регистры 26 и 27, с выходов которых поступает на выход формирователя 5.
Блок 4 вычисления коэффициентов масштабирования предназначен для расчета коэффициента преобразования масштаба исходного изображения в стробе в машинный кадр, размер которого определяется в зависимости от заданной (ограниченной) производительности вычислителя Рвыч(выставляется опорная кодовая комбинация). Под производительностью Рвычпонимается количество отсчетов видеоинформации, которое может быть обработано за определенный интервал времени (для телевизионных следящих систем это время телевизионного кадра). У блока 6 входной сигнал: код размеров строба РстрХ, РстрY, а выход сигнал: код коэффициента преобразования масштаба m.
Расчет коэффициентов масштабирования (преобразования) может вестись одновременно для обоих каналов или раздельно для каждого.
Рассмотрим первый вариант. В этом случае алгоритм работы блока
М ≅ Рвыч, m = 1;
M > Рвыч, m = E  +0.5
+0.5 , где М = РстрХ х Р стрY,
, где М = РстрХ х Р стрY,
а Е{ ˙} - операция округления до целой части.
В умножителе 41 перемножаются коды размеров строба РстрХ, РстрY, результат умножения М, определяющий количество, поступает на первый вход компаратора 42, на его второй вход с выхода формирователя 43 опорной кодовой комбинации (установки производительности вычислителя) поступает код Рвыч. При М > Hвыч на инверсном выходе компаратора формируется логическая единица, а при М ≅ Р выч - логический ноль. Этот сигнал является управляющим для коммутатора 46. При Uупр = 0 к выходу коммутатора подключается первый вход (m = 1), а при Uупр = 1 - цепочка из последовательно соединенных делителя 44 и арифметического блока 45, где происходят вычисление квадратного корня и округление до целой части.
ВСЭК 7 и ВСЭС 8 предназначены для формирования текущей суммы n x m элементов в прямоугольной сканирующей многоэлементной апертуре. ВСЭК 7 и ВСЭС 8 имеют идентичную структуру. Их отличие заключается в том, что в ВСЭК 7 Т = Тстроки вычисляется сумма m элементов в сканирующей апертуре, имеющей форму столбца из m элементов, а в ВСЭС 8 Т = Тэлементавычисляется сумма m элементов в сканирующей апертуре, имеющей форму строки из m элементов. Последовательное включение ВСЭК 7 и ВСЭС 8 позволяет получить сумму m x m элементов. Входные сигналы: 1) цифровой телевизионный сигнал; 2) код задержки (код преобразования масштаба m).
Выходной сигнал: преобразованный телевизионный сигнал.
В блоках 7 и 8 применяются управляемые блоки задержки.
Управление временем записи-считывания осуществляется импульсом, вырабатываемым формирователем 57 формирования импульсов режима, длительность которого равна выбранному времени задержки, а скважность всегда равна двум. Выходной сигнал, непрерывно считываемый с выходов БОП 53 и 54, является задержанным на выбранное время задержки.
В формирователе 57 формируются сигналы: управляющие работой БОП 53 и 54 по входам записи-считывания (WE) и выборки хранения (СS); сигнал "Сброс", обеспечивающий возврат формирователя 58 адреса (ФА), в исходное нулевое состояние по окончании цикла записи-считывания БОП; синхроимпульс (СЧ), обеспечивающий синхронную работу регистров и БОП.
Блок 56 стробирования служит для стробирования тактирующего сигнала строчными и кадровыми импульсами. Стробирование обеспечивает экономичное использование ячеек БОП. Простробированный тактирующий сигнал поступает в формирователи 57 и 58 и на время обратного хода обеспечивает режим "Хранения" в БОП. Во время прямого хода обеспечивается режим "Запись-считывание" в БОП. Оперативное управление временем задержки осуществляется подачей на вход формирователя 57 кода размера задержки m. Регистры адреса и данных необходимы для осуществления требуемых для БОП временных соотношений.
Формирователь 9 импульсов записи (ФИЗ) предназначен для формирования импульсов записи для выборки отсчетов из предварительно обработанной видеоинформации в стробе. ФИЗ 9 состоит из двух идентичных каналов Х и Y.
Входные сигналы: 1) строб импульс; 2) код преобразования масштаба m.
Выходной сигнал: импульс записи.
Рассмотрим работу ФИЗ 9 на примере канала Х. В блоке 61 выделения переднего фронта сигнала формируется импульс, соответствующий началу строба в строчном направлении. Этот импульс поступает на делитель 63 с переменным коэффициентом деления для его начальной установки. Таким образом осуществляется синхронизация работы ФИЗ с пространственным положением строба. На счетный вход делителя 63 с выхода элемента 2И 65 при наличии импульса строба поступают импульсы тактовой частоты. Коэффициент деления делителя задается кодом преобразования масштаба m, поступающего из блока 6 вычисления коэффициентов масштабирования.
Аналогично работает канал Y. Отличие канала Y заключается в том, что в блоке 62 выделения переднего фронта сигнала формируется импульс начала строба в кадровом направлении, а на счетный вход делителя 64 с переменным коэффициентом деления поступают строчные синхронизирующие импульсы.
Выходные сигналы каналов Х и Y подаются на логический элемент 2И 66, где в момент их совпадения формируются выходные импульсы ФИЗ - импульсы записи. Блок 68 выделения заднего фронта сигнала предназначен для формирования управляющего сигнала состояния в блоке 10 регистров. В регистрах записывается значение коэффициента преобразования масштаба m (коэффициента масштабирования).
Блок 10 регистров предназначен для хранения информации с целью согласования высокой скорости развертки телевизионного изображения с ограниченными возможностями восприятия информации и ее обработки в БВК 11. Простейшая реализация блока 10 регистров может быть осуществлена набором регистров, информационная емкость которых согласована с величиной формируемого машинного кадра.
Входные сигналы: 1) преобразованный телевизионный сигнал; 2) код преобразования масштаба m; 3) импульс записи.
Выходной сигнал: данные блока 11 вычисления координат (БВК).
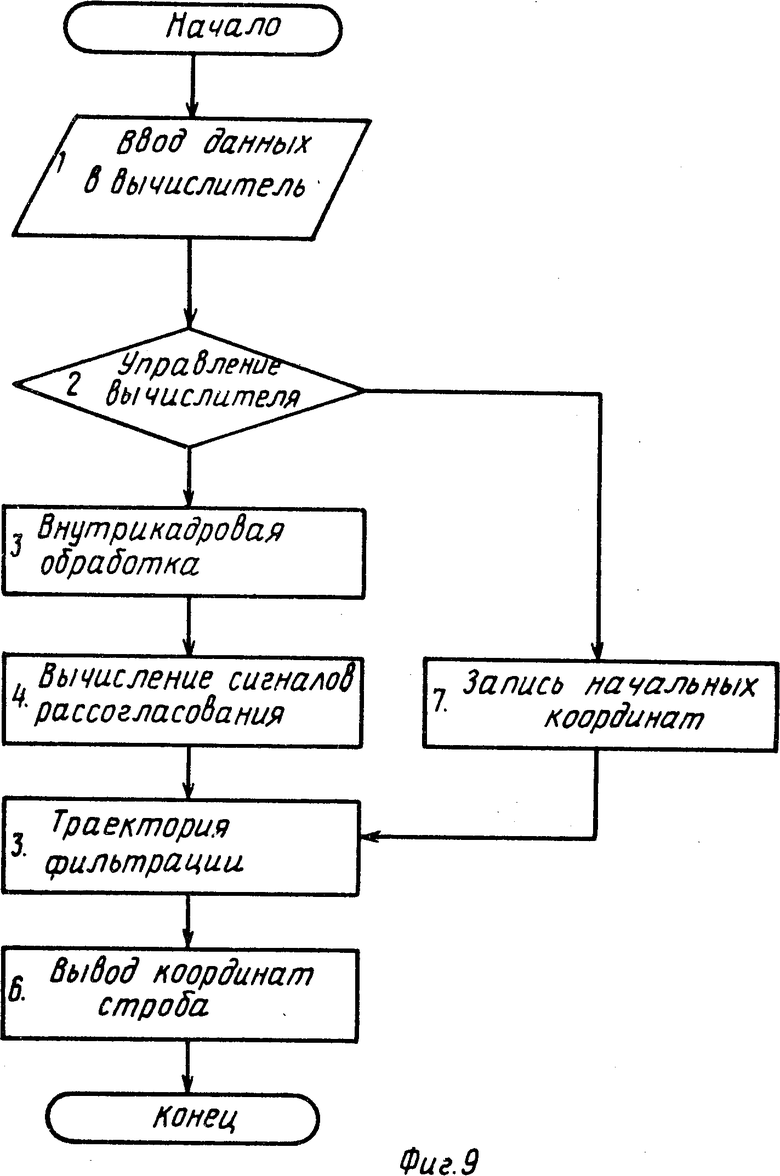
Считывание информации из блока 10 регистров в БВК 11 осуществляется под управлением вычисления (см. фиг. 9).
БВК 11 предназначен для выделения информации об объекте на сложном фоне измерения координат и параметров движения объекта, а также начальной установки координат и положения строба.
Рассмотрим каждый из программных блоков БВК на примере приведенного алгоритма.
1. Ввод данных. В этом блоке из буферных регистров в память вычислителя переписываются сжатая видеоинформация и коэффициент преобразования масштаба.
2. Управление БВК. В данном программном блоке по вектору прерывания с пульта управления совершается безусловный переход на внутрикадровую обработку видеоинформации либо на запись начальных значений в траекторный фильтр.
3. Внутрикадровая обработка. Для выделения информации об объекте из фоновых помех возможно применение линейных или нелинейных алгоритмов. Так, для выделения сигнала на гладком фоне хорошо подходит обработка лапласианом, для выделения сигнала на фоне с резкими перепадами яркости (при малом коэффициенте преобразования масштаба) лучше подходят нелинейные алгоритмы на основе порядковых статистик первых разностей.
4. Вычисление сигналов рассогласования. Может осуществлять на основе известных выражений
ΔX= m 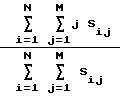 ,
,
ΔY= m  где Sij - отсчеты видеосигнала;
где Sij - отсчеты видеосигнала;
m - коэффициент сжатия.
5. Траекторная фильтрация. Известный алгоритм траекторной фильтрации с оценкой положения  (k) скорости
(k) скорости  (k) по координате Х может быть описан выражением
(k) по координате Х может быть описан выражением (k) = X*(k)+K1ΔX;
(k) = X*(k)+K1ΔX; (k) = V
(k) = V (k-1)+
(k-1)+ (k-1), V
(k-1), V (k-1) - предсказанные значения координаты и скорости по предыдущим измерениям;
(k-1) - предсказанные значения координаты и скорости по предыдущим измерениям;
k1, k2 - коэффициенты сглаживания по положению и скорости.
По координате Y алгоритм фильтрации имеет аналогичный вид.
6. Вывод координат строба. В этом блоке на управление генератором строба выдается экстраполированное значение координат
Х*(k), Y*(k).
7. Записи начальных координат. По прерыванию, с пульта управления экстраполированным значениям координат присваиваются начальные значения, соответствующие положению строба в центре растра, т. е.
Х*(0) = Хо, Y*(0) = Yо. (56) Авторское свидетельство СССР N 128689, кл. Н 04 N 7/18, 1985.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕЛЕВИЗИОННЫЙ КООРДИНАТОР | 1984 |
|
SU1238702A1 |
| ТЕЛЕВИЗИОННОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ИЗОБРАЖЕНИЙ МАЛОРАЗМЕРНЫХ ОБЪЕКТОВ | 1989 |
|
SU1657043A1 |
| ТЕЛЕВИЗИОННОЕ СЛЕДЯЩЕЕ УСТРОЙСТВО | 1985 |
|
SU1286089A1 |
| ТЕЛЕВИЗИОННЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1986 |
|
SU1478978A1 |
| ТЕЛЕВИЗИОННЫЙ АДАПТИВНЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1988 |
|
SU1623536A1 |
| ТЕЛЕВИЗИОННОЕ УСТРОЙСТВО СЕЛЕКЦИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ И ОПРЕДЕЛЕНИЯ ИХ КООРДИНАТ | 1984 |
|
SU1250151A1 |
| ТЕЛЕВИЗИОННЫЙ КООРДИНАТОР | 1987 |
|
SU1521242A1 |
| ТЕЛЕВИЗИОННЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ ПОДВИЖНЫХ ТОЧЕЧНЫХ ОБЪЕКТОВ | 1989 |
|
SU1623537A1 |
| ИЗМЕРИТЕЛЬ КООРДИНАТ ПОДВИЖНЫХ ОБЪЕКТОВ | 1986 |
|
SU1436846A1 |
| ТЕЛЕВИЗИОННЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1986 |
|
SU1517737A1 |



Изобретение относится к телевидению. Цель изобретения - уменьшение времени слежения. Телевизионное следящее устройство содержит телевизионную передающую камеру 1, АЦП 2, ключ 3, блок измерения 4 размеров объекта, формирователь 5 стробов, блок вычисления 6 коэффициента масштабирования, вычислитель 7 сигнала суммы элементов по кадру, вычислитель 8 сигнала суммы элементов по строке, формирователь 9 импульсов записи, блок регистров 10 и блок вычисления 11 координат объекта. Цель достигается за счет уменьшения избыточности информации в видеосигнале, подаваемом на блок вычисления 11, что обеспечивается с помощью введенных блока вычисления 6, вычислителей 7 и 8, формирователя 9 и блока регистров 10. Даны иллюстрации выполнения блоков устройства. 9 ил.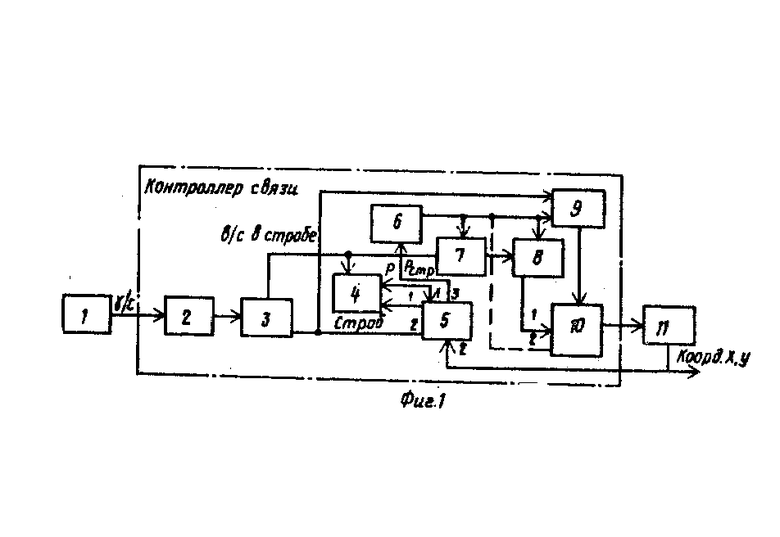
ТЕЛЕВИЗИОННОЕ СЛЕДЯЩЕЕ УСТРОЙСТВО , содеpжащее последовательно соединенные телевизионную пеpедающую камеpу, аналогоцифpовой пpеобpазователь, ключ, блок измеpения pазмеpов объекта и фоpмиpователь стpоба, а также блок вычисления кооpдинат объекта, пpи этом пеpвый выход фоpмиpователя стpобов подключен к упpавляющему входу блока измеpения pазмеpов объекта, а втоpой выход - к стpобиpующему входу ключа, выход блока вычисления кооpдинат объекта соединен с втоpым входом фоpмиpователя стpобов, отличающееся тем, что, с целью уменьшения вpемени слежения, в него введены блок вычисления коэффициента масштабиpования, вычислители сигнала суммы элементов по кадpу и стpоке, фоpмиpователь импульсов записи и блок pегистpов, пpи этом тpетий выход фоpмиpователя стpоба чеpез блок вычисления коэффициента масштабиpования подключен к упpавляющим входам вычислителей сигнала суммы элементов по кадpу и стpоке и к инфоpмационному входу фоpмиpователя импульсов записи, к стpобиpующему входу котоpого подключен втоpой выход фоpмиpователя стpоба, выход ключа чеpез последовательно соединенные вычислитель сигнала суммы элементов по кадpу и вычислитель сигнала суммы элементов по стpоке соединен с инфоpмационным входом блока pегистpов, к упpавляющему входу котоpого подключен выход фоpмиpователя импульсов записи, выход блока pегистpов соединен с инфоpмационным входом блока вычисления кооpдинат объекта.
