2.Устройство по п. 1, отличающееся тем, что датчик угла поворота и вращающийся элемент выполнены в виде кулачка, связанного с подвижной обоймой.посредством гофрированной пружинной шайбы, а приемные элементы выходного преобразователя, размещенногр на внешней стороне неподвижной обоймы, через отверстие, выполненное в цилиндрической стенке неподвижной обоймы, размещены в плоскости перемещения кулачка.
3.Устройство по п. 2, о т л ичающееся тем, что на поверхности кулачка и,внутренней поверхности неподвижной обоймы выполнены стопорящие выступы и пазы.
4.Устройство.по пп. 1 - 3, о тл и ч а ю щ е е с я тем, что, с целью изменения коэффициента масшта.бирования устройства, между подвижной обоймой и датчиком угла поворота в кольцевой герметичной полости расположена планетарная передача, планетарная шестерня которой связана
эксцентричным подшипника с подвижной обоймой, причем планетарi ная шестерня выполнена с двумя зуб|чатыми венцами с различным диаметром I делительной окружности и передаточ1ным отношением, первый зубчатый венец связан с зубчатым венцом кольцевой шестерни с внутренними зубьями, закрепленной на неподвижной обойме, второй зубчатый венец связан с ссгасным вращающимся элементом, являющимся центральным колесом планетарi ной передачи;
; 5, Устройство по п, 4, о т л и чающееся тем, что центральное колесо планетарной передачи установлено с возможностью вращения на неподвижной обойме. I б. Устройство по п. 1, отличающееся тем, что, с целью обеспечения пожаро- и взрывобезопасности, а также безопасности от внешнего избыточного давления, между обоймами установлены подшипники и выполнен пламягасящий зазор.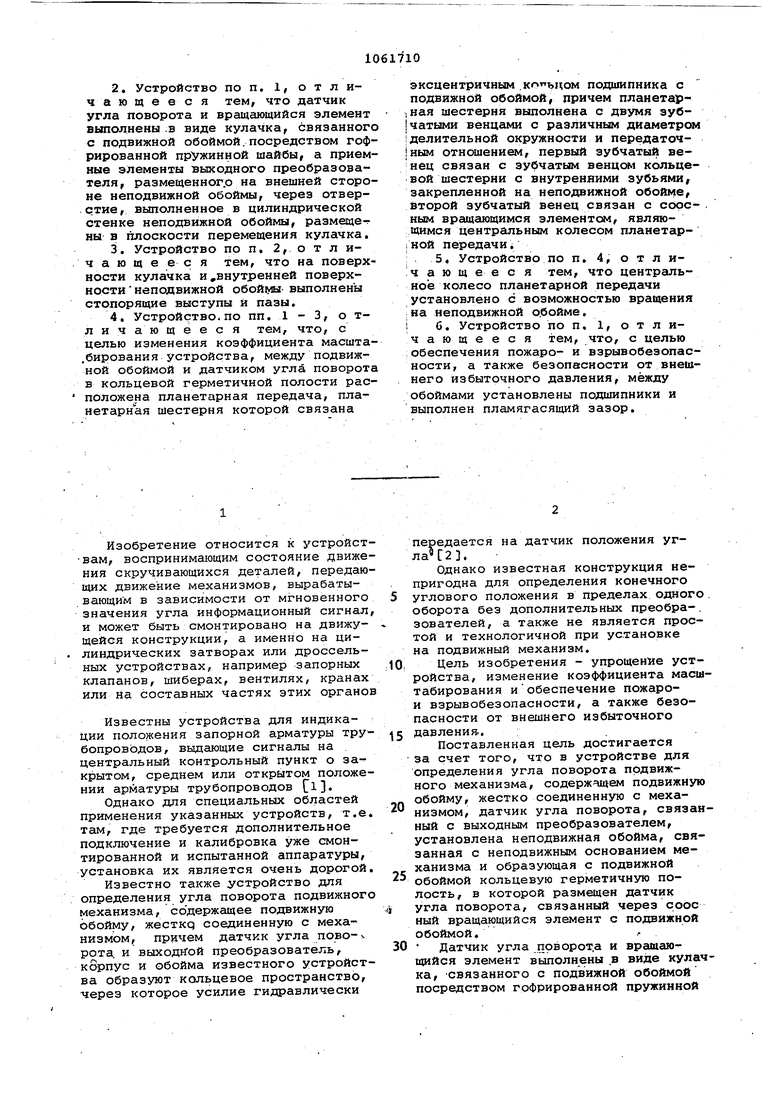


| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм для поворота стрелового самоходного крана | 1977 |
|
SU656956A1 |
| РЕВОЛЬВЕРНАЯ ГОЛОВКА | 1988 |
|
RU2044608C1 |
| ПОВОРОТНОЕ ЗАГРУЗОЧНОЕ УСТРОЙСТВО ДЛЯ ШАХТНОЙ ПЕЧИ | 2013 |
|
RU2614485C2 |
| Строкопечатающий механизм для кассовых аппаратов | 1981 |
|
SU1042624A3 |
| Многоцелевое гидравлическое устройство объемного вытеснения | 1978 |
|
SU1237092A3 |
| РОТОРНАЯ ОБЪЁМНАЯ МАШИНА | 2018 |
|
RU2701306C1 |
| МЕХАНИЗМ ПОДЪЕМА | 2018 |
|
RU2692323C1 |
| ГИДРОМОТОР-КОЛЕСО ТРАНСПОРТНОГО СРЕДСТВА | 1993 |
|
RU2038226C1 |
| Электропривод трубопроводной арматуры с ручным дублером | 2022 |
|
RU2797329C1 |
| Инструментальная револьверная головка | 1987 |
|
SU1484457A1 |

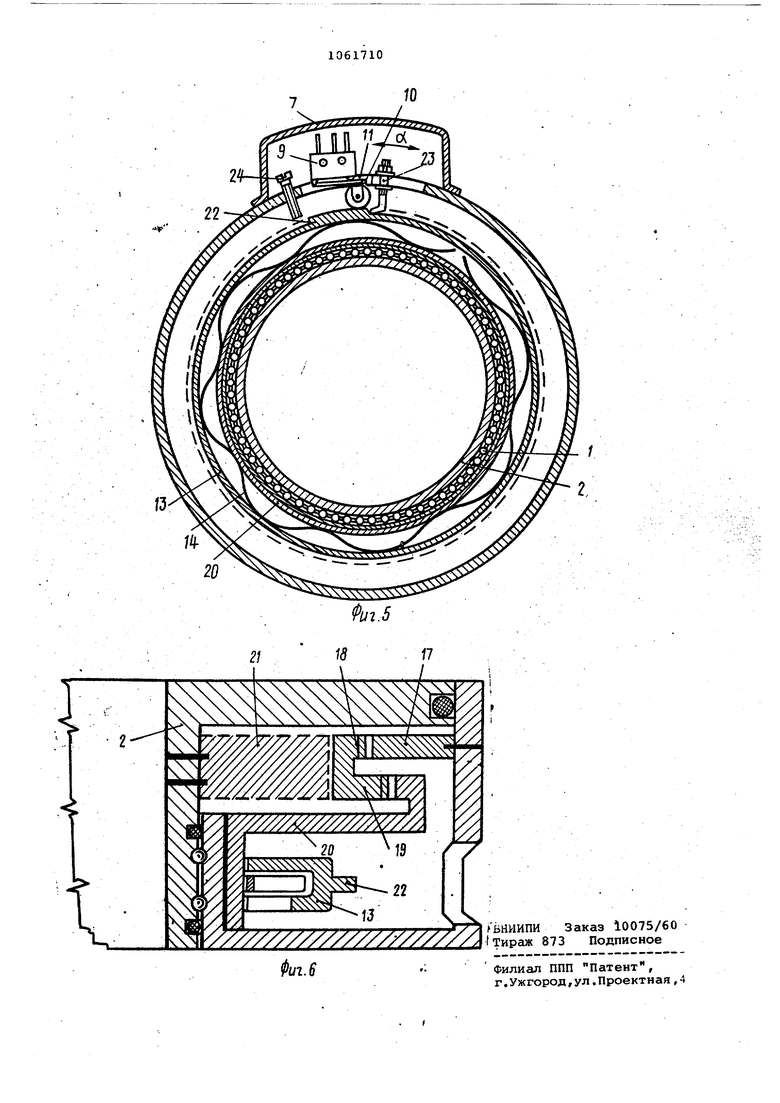
I. УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛА ПОВОРОТА ПОДВИЖНОГО МЕХАНИЗМА, содержащее подвижную обойму, жестко соединенную с ьюханизмом, датчик угла поворота, связанный с выходным преобразователем, о т л ича ю щее с я тем, что, с целью упрощения устройства, оно содержит неподвижную обойму, связанную с неподвижным основанием механизма и образующую с подвижной обоймой кольцевую герметичную полость, в которой размещен датчик угла поворота, связанный через соосный вращающийся элемент с подвижной обоймой. а -ч1 4 у 2Z Фи-i.l
Изобретение относится к устройствам, воспринимающим состояние движения скручивающихся деталей, передающих движение механизмов, вырабатывающим в зависимости от мгновенного значения угла информационный сигнал, и может быть смонтировано на движущейся конструкции, а именно на цилиндрических затворах или дроссельных устройствах, например запорных клапанов, шиберах, вентилях, кранах или на составных частях этих органов
Известны устройства для индикации положения запорной арматуры трубопроводов, выдающие сигналы на . центральный контрольный пункт о закрытом, среднем или открытом положении арматуры трубопроводов
Однако для специальных областей применения указанных устройств, т.е. там, где требуется дополнительное подключение и калибровка уже смонтированной и испытанной аппаратуры, установка их является очень дорогой.
Известно также устройство для определения угла поворота подвижного механизма, содержащее подвижную обойму, жесткд соединенную с механизмом, причем датчик угла пово-s рота, и выходной преобразователь, кбрпус и обойма известного устройства образуют кольцевое пространство, через которое усилие гидравлически
передается на датчик положения углаЧ2.
Однако известная конструкция непригодна для определения конечного
5 углового положения в пределах одного оборота без дополнительных преобра-. зователей, а также не является простой и технологичной при установке на подвижный механизм.
0 Цель изобретения - упрощение устройства, изменение коэффициента масштабирования иобеспечение пожарои взрывобезопасности, а также безопасности от внешнего избыточного
5 давления.. :
Поставленная цель достигается за счет того, что в устройстве для определения угла поворота подвижного механизма, содержащем подвижную обойму, жестко соединенную с механизмом, датчик угла поворота, связанный с выходным преобразователем, установлена неподвижная обойма, связанная с неподвижным основанием ме ханизма и образующая с подвижной
обоймой кольцевую герметичную полость, в которой размещен датчик угла поворота, связанный через соос ный вращающийся элемент с подвижной обоймой..0 Датчик угла поворот.а и вращающийся элемент выполнены в виде кулачка, Связанного с подвижной обоймой посредством гофрированной пружинной шайбы, а приемные элементы выходного преобразователя, размещенного на внешней стороне неподвижной обоймы, через отверстие, выполненное в :ци линдрической стенке неподвижной обоймы, размещены в плоскости перемещения кулачка, а на поверхности кулачка и внутренней поверхности неподвижной обоймы выполнены стопорящие выступы и пазы. Кроме того, между подвижной обоймой и датчиком угла поворота в кольцевой герметичной полости расположена Планетарная передача, планетар ная шестерня которой связана эксцент ричным кольцом подшипника с подвижной обоймой, причем планетарная шестерня выполнена с двумя зубчатыми венцами с различным диаметром делительной окружности и передаточным отношением, первый зубчатый венец связан с зубчатым венцом кольцевой шестерни с внутренними зубьями, закрепленной на неподвижной обойме, вто рой зубчатый венец связан с соосным вращающимся элементом, являющимся центральным колесом планетарной пере дачи, а центральное колесо планетарной передачи установлено с возможностью вреицен ия на неподвижной обой. ме. ,.,. При этом между обоймами установле ны.подшипники и выполнен пламягасящий зазор. На фиг.1 показаны подвижные и неподвижные обоймы в сборе; на фиг.2 вариант исполнения устройства с пламягасящим зазором; на фиг.З - устройство с установленным в кольцевом пространстве между обоймами датчиком угла поворота в виде кулачка, взаимо действующего с выходным преобразователем, вид сверху; на фиг.4 - выходной преобразователь, один из вариантов; на фиг.5 - вариант устройства с планетарной передачей, вид сверху на фиг.6 - то же, вид сбоку . Конкретный объект, на который устанавливается устройство, определяет, из скольких частей оно будет состоять в готовом виде. Существенным является то, что после сборки две кольцевые детали (подвижная и неподвижная обоймы) уложены друг на друга и образуют между собой кольцевое пространство. Эти детали - неподвижная обойма 1 и укрепленная на ней подвижная обойма 2 - представлены на фиг.1, причем для обеспечения их взаимного скручивания установлены подшипники 3, а для защиты от влаги может быть установлено уплотнение 4. При выполнении оборудования в пожаро- и взрывоопасном исполнении, а также для обеспечения безопасности от внешнего избыточного давления между обоймами выполнен пламягасящий зазор 5 с уплотнением 4 в нем. Устройство (фиг.З) также содержит жестко закрепленное на неподвижной обойме 1 колесо б со стопорным пазом. На внийней стороне обоймы 1 установлен закрытый корпус 7, в котором установлен выходной преобразователь 8, который может быть выполнен в виде микровыключате-лей 9, приводимый в действие рычагом 10. Рычаг 10 является приемным элементом выходного преобразователя 8 и воспринимает через отверстие 11, выполненное в цилиндрической стенке 12 неподвижной обоймы 1, движение датчика угла поворота. Датчик угла поворота и вращающийся элемент представлявэт собой кулачок 13, связанный через гофрированную пружинную шайбу 14 с подвижной обоймой 2, жестко соединенную с механизмом, угол поворота которого определяется. Неподвижная обойма 1 связана с неподвижным основанием. Гофрированная пружинная шайба 14 с помощью силы трения создает гарантированное напряжение между обоймой 2 и кулачком 13, размещенным в кольцевой герметичной полости 15. На кулачке 13 выполнен стопор 16 для взаимодействия с пазом на колесе G . Устройство по варианту, изображенному на фиг. 5 и б, содержит подвижную обойму 2, неподвижную обойму 1. Между подвижной обоймой .1 и дат-чиком угла поворота размещена планетарная передача, состоящая из кольцевой шестерни 17 (фиг.6) с внутренними зубьями планетарной шестерни с двумя зубчатыми венцагли 18 и 19 и соосного вращающегося элемента 20 с зубчатым венцом с внутренними зубьями, являющегося центральным колесом планетарной передачи. Планетарная шестерня с венцами 18 и 19 установлена с возможностью вращения на эксцентри чном кольце 21 подшипника. Эксцентричное кольцо 21 жестко связано с подвижной обоймой 2. Первый зубчатьгй венец 18 планетарной шестерни, находится в зацеплении с кольцевой шестерней 17, которая связана с неподвижной обоймой . 1. Второй зубчатьгй венец 19 связан с зубчатым венцом центрсьльного колеса 20 планетарной передачи. Центральное колесо 20 планетарной передачи может быть установлено с возможностью вращения на неподвижной обойме 1. Элементом, передающим движение датчику угла поворота, является центральное колесо 20, связанное посредством гофрированной пружинной шайбы 14 с кулачком 13, имеющим выступ 22. Выступ 22 взаимодействует с рычагам 10. В неподвижной обойме 1 выполвены пазы (отверстия) 11, в которых укреплены переставляемые стопоры 23 для упора в выступ 22, для индикации конечного положения, С другой стороны ьыступа 2 на ббойме 1 уста новлен выступ 24 для индикации начального положения подвижного механизма.
В рассматриваемом варианте угол между обоими положениями механизма имеет при одном обороте около 350 и к этому добавляется полное число o6ppOTOB, -соответствующее значению передаточного отнетиения планетарной передачи. ..
Ус1|гройство (фиг. 3 и 4) работае следующим образом.
При вращении подвижной обоймы 2, связанной с подвижным механизмом, .кулачок 13 воздействует на-рычаг 10 одного из микровыключателей 9. В приведенном примере угол поворота определяется от исходного положения подвижного механизма до его конечного положения и составляет паз 90 Паз на колесе б предназначен для стопорёния кулачка 13 стопором 16 при набегании профиля кулачка 13 на рычаг 10.
Устройство (фиг.6) работает следующим образом.
Эксцентричное колесо 21 вращается совместно с подвижной обоймой 2
и прижимает зубчатые венщл 18 и 19 к кольцевой шестерне 17 и центргшьному колесу 20. Так как -диаметр.делительной окружности и переда.точное отношение венцов планетарной передачи различны, колесо вращается в зависимости от разности этих величин. Например, если различие в числе зубьев обоих венцов равно, например, 129 - 125 - 4, то поворот колеса
20 при обороте подвижной обоймы 2 соответствует дпине дуги в 4 .зуба. При этом кулачок 13 поворачивается в соответствии с поворотом колеса 20.
Угол между обоими положениями механизма можно настраивать с Помощью перестановки венцов 18 и 19, эксцентричного кольца 21 и поворота колеса 20 относительно неподвижной
обоймы 1. Вместо планетарной передачи в устройстве, могут быть использованы зубчатая или червячная передачи со сменными элементами. Датчики угла поворота могут быть выполнены
в виде индуктивного, емкостного
или пневматических датчиков.
Предлагаемая конструкция позволяет сделать устройство для определения угла поворота более универсальным, технологичным и, следовательно, более дешевым.
Фиг.г
г
Jli 7777777
.
11
12
Фиг.З
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Агейкин Д.И., Костина Е.Н., Куз&ецова Н.И | |||
| Датчики систем автоматического контроля и регулирования | |||
| М., Машиностроение, 1959, с | |||
| Приспособление с иглой для прочистки кухонь типа "Примус" | 1923 |
|
SU40A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ИНДИКАТОР ОБОРОТОВ РОТОРА ЦЕНТРИФУГИ С ГИД'РАВЛИЧЕСКИМ ПРИВОДОМ | 0 |
|
SU356560A1 |
