Изобретение относитсй к горному машиностроению и может быть испрльзовано в роторных экскаваторах и отвалообразователях на рельсошагающем ходу, а также в мощных карьерных одноковшовых экскаваторах с гидравлической системой выравнивания платфор1«1Ыв :
Известно устройство для демпфирования колебаний металлоконструкций роторного экскаватора, содержащее датчики колебаний, установленные на металлоконструкциях и подключенные через программный блок к системе управления силовьам органом г. J,
Наиболее близким к изобретение jnp технической сущности является устройство для демпфирования колебаний металлоконструкций роторного экскаватора, оборудованного поворотной надстройкой и опорными гидродомкратами с системами управлния, их рабочими движениями, содержащее установленные на металлоконструкции датчики колебаний, подключенные к формирователю управляющего воздействия, а также системы управления демпфирующими движениями каждого из опорных гидродомкратов С 2, , :
Недостатком известного устройства является малая эффективность демпфирования колебаний при повороте надстройки относительно опорных гидродомкратов в горизонтальной плоскости, производимого для разра бо.тки забоя, поскольку в этом случае плоскость угловых демпфирующих перемещений платформы не совпадает с плоскостью движения колеблющихся масс роторной стрелы, противовесной консоли и надстройки.
Целью изобретения является повышение эффективности демпфирования колебаний при повороте надстройки относительно опорных гидродомкрато в горизонтальной плоскостл
, Указанная цель достигается тем, что устройство для демпфирования колебаний металлоконструкций роторного экскаватора, оборудованного поворотной надстройкой и опорными гидродомкратами с ситемами управления их демпфирующими движениями, содержащее установленные на металлоконструкции датчики колебаний, подключенные к формирователю управляющего воздействия, а также системы управления демпфирующими движениями каждо го из опорных гидродомкратов, снабжено датчиком угла поворота надстройки в горизонтальной плоскости, четырьмя функционал ными косинусно-фазовыми преобразователями, четырьмя множительными блоками, причем система управления дем фирующими движениями каждого
из опорнызс гидродомкратов подключена к выходу одного из четырех множительных блоков, один из входов которых соединен с .формирователем управляющего воздействия, а другой с рдним из четырех функциональных косинусно-фазовых преобразователей, подключенных к датчику угла поворота надстройки в горизонтальной
ПЛОСКОСТЯв
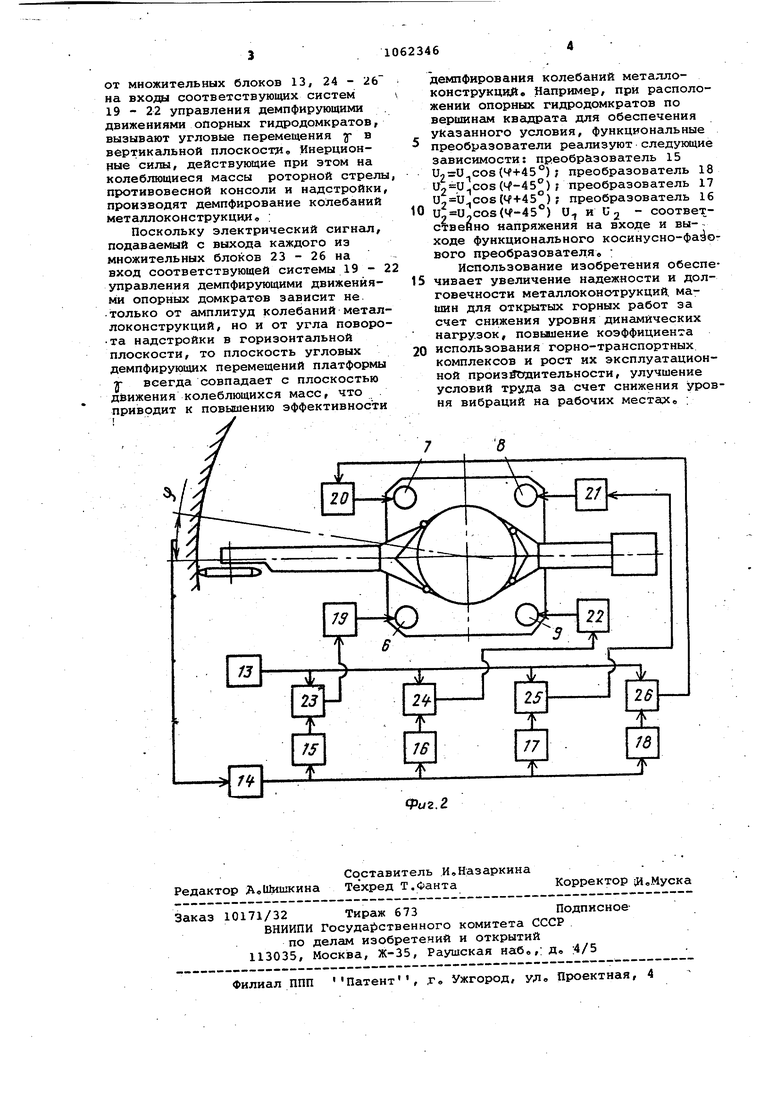
На фнг, 1 представлен роторный экскаватор; на фига2 - блок-схема устройства для демпфирования колебаний его металлоконструкций.
Роторный экскаватор, содержащий платформу 1, поворотный круг 2, поворотную надстройку 3, роторную стрелу 4 и противовесную консоль 5, оборудован опорными гидродомкратами 6 - 9 с соответствующими системами 10 управления их рабочими движениями во время передвижения машины (показана одна система), Датчики 11 и 12 колебаний, установленные на металлоконструкции, подключены к формирователю 13 управляющего воздействия, а датчик 14 угла поворота надстройки в горизонтальной плоскости подключен к функциональным косинусно-фазовым преобразователям 15 - 1:8, Системы 19-22 управления демпфирующими движениями каждого из опорных гидродомкратов подключены к множительным блокам 23 - 26, один из входов которых соединен с формирователем 13 управл ющего воздействия, а другой - с соответствующим функциональным косинусно-фазовьпи преобразователем.
При работе роторного экскаватора вследствие переменности усилия на рабочем органе возникают колебания металлоконструкций, сопровождающиеся вертикальными перемещениями масс.роторной стрелы 4 и прот вовесной консоли .5, Указанные перемещения регистрируются датчиками 11 и 12 колебаний, электрические сигналы с которых поступают на вход формирователя 13 управляющего воздействия, В качестве датчиков 11 и 12 колебаний могут быть использованы, например акселерометры, а в качестве формирователя управляющего воздействия - интегратор. Электрический сигнал с выхода формирователя 13 управляющего воздействия поступает на один из входов каждого из множительных блоков 23 - 2.6, Одновременно на другой вход кгикдого из этих блоков поступает электрический сигнал с выхода соответствующего функционального кбсинусно-фаэового преобразователя 15 - 17 или 18, на вход которого подается сигнал с датчика 14 угла поворота надстройки Ч в горизонтальной плоскост Электрические сигналы, поступающие
от множительных блоков 13, 24 - 26 на входы соответствующих систем 19 - 22 управления демпфирующими движениями опорных гидродомкратов, вызывают угловые перемещения а вертикальной плоскост. Инерционные силы, действующие при этом на колеблющиеся массы роторной стрелы противовесной консоли и надстройки, производят демпфирование колебаний металлоконструкциив :
Поскольку электрический сигнал, подаваемый с выхода каждого из множительных блоков 23 - 26 на вход соответствующей системы 19 - 2 управления демпфирующими движениями опорных домкратов зависит не только от амплитуд колебаний металлоконструкций, но и от угла поворота надстройки в горизонтальной плоскости, то плоскость угловых демпфирующих перемещений платформы jr всегда совпадает с плоскостью д вижения колеблющихся масс, что приводит к повышению эффективности
демпфирования колебаний металлоконструкций. Например, при расположений опорных гидродомкратов по вершинам квадрата для обеспечения указанного условия, функциональные преобразователи реализуютследующие зависимости: преобразователь 15 (4+45°) ; преобразователь 18 U2 PiCOs (45) ; преобразователь 17 cos(4+45 ); преобразователь 16
-1 З соответственно напряжения на входе и вы-
ходе функционального косинусно-фа ового преобразователя :
Использование изобретения обеспе5 чивает увеличение надежности и долговечности металлоконструкций, машин для открытых горных работ за счет снижения уровня динамических нагрузок, повьииение коэффициента
0 использования горно-транспортных, комплексов и рост их эксплуатационной произйОдительности, улучшение условий труда за счет снижения уровня вибраций на рабочих местазс ;
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для демпфирования колебаний металлоконструкций роторного экскаватора | 1986 |
|
SU1452887A1 |
| Роторный экскаватор | 1985 |
|
SU1271942A1 |
| Устройство для гашения колебаний металлоконструкций роторного экскаватора | 1980 |
|
SU899762A1 |
| Устройство для гашения колебаний металлоконструкций роторного экскаватора | 1985 |
|
SU1271941A1 |
| Подвеска стрелы рабочего органа роторного экскаватора | 1988 |
|
SU1709022A1 |
| Устройство для управления роторным экскаватором | 1982 |
|
SU1059073A1 |
| Роторный экскаватор | 1977 |
|
SU787559A1 |
| Устройство для гашения колебаний металлоконструкций роторного экскаватора | 1987 |
|
SU1474222A1 |
| Роторный экскаватор | 1988 |
|
SU1609880A1 |
| Устройство виброзащиты кабины машиниста экскаватора | 1987 |
|
SU1537774A1 |
УСТРОЙСТВО ДЛЯ ДЕМПФИРОВАНИЯ КОЛЕБАНИЙ МЕТАЛЛОКОНСТРУКЦИЙ РОТОРНОГО ЭКСКАВАТОРА, оборудованного поворотной подстройкой и опорными гидродомкратами с системами управления их рабочими движениями, содержащее установленные на металлоконструкции датчики колебаний, подключенные к формирователю управляющего воздействия, а также системы управления демпфирующими движениями каждого из опорных гидродомкратов, отличающееся тем, что, с целью повышения эффективности демпфирования колебаний при повороте надстройки относительно опорных гидродомкратов в горизонтальной плоскости, устройство снабжено датчиком угла поворота надстройки в горизонтальной плоскости, четырьмя функционсшьными косинусно-фазовыми преобразователями, четырьмя множительными блоками, .причем система управления демпфирующими движениями каждого из опорных гидродомкратов подключена к выходу одного из четырех множительв ных блоков, один из входов которых соединен с формирователем управляющего воздействия, а другой - с одним из четырех функциональных косинусно-фазовых преобразователей, подключенных к датчику угла поворо-. та надстройки в горизонтальной ПЛОСКОСТ.И, о: IN9 СО 4 О
| Д, Авторское свидетельство СССР 708016, кл, Е 02 F 3/26, 198,0, .2, Авторское свидетельство СССР 899762, кл, .Е 02 Р 3/26, 1980 (прототип;) , : |
