сторонний шток гидроцилиндра (ГЦ) 17 (18) синхронного управления двумя опорными гидродомкратами (ГД) 1, 4 и 2, 3. Последние расположены в противолежащих вершинах четьфехугольни- ка. Каждая из рабочих полостей ГЦ 17 (18) сообщена с рабочей полостью одного из ГД 1-4. Блок управления выполнен из электрогидравлического усилителя и исполнительного ГЦ, шток которого кинематически связан со штоком ГЦ 17 (18). При колебаниях металлоконструкций вертикальные перемещения роторной стрелы регистрирзпотся датчиком 5 колебаний, с выхода которого сигнал поступает на вход формирователя 10 управляющего воздействия. С выхода.формирователя сигнал поступает на входы множительных блоков (МБ) 13 и 14. На другие входы МБ 13 и 14 поступают сигналы с выходов функциональных, косинусно-фазовых преобразователей 8 или 9, на входы которых подается сигнал с датчика 6 угла поворота стрелы в горизонтальной плоскости. Сигналы с выходов МБ 13, 14 поступают на входы систем 11, 12 управления и обрабатьшаются ими. Исполнительные ГЦ каждой системь через шарниры приводят в движение ГЦ 17 и 18 и ГД 1-4. Угловые перемещения экскаватора, пропорциональные колебательной скорости стрелы, производят демпфирование колебаний. 1 з.п. ф-лы, 4 ил.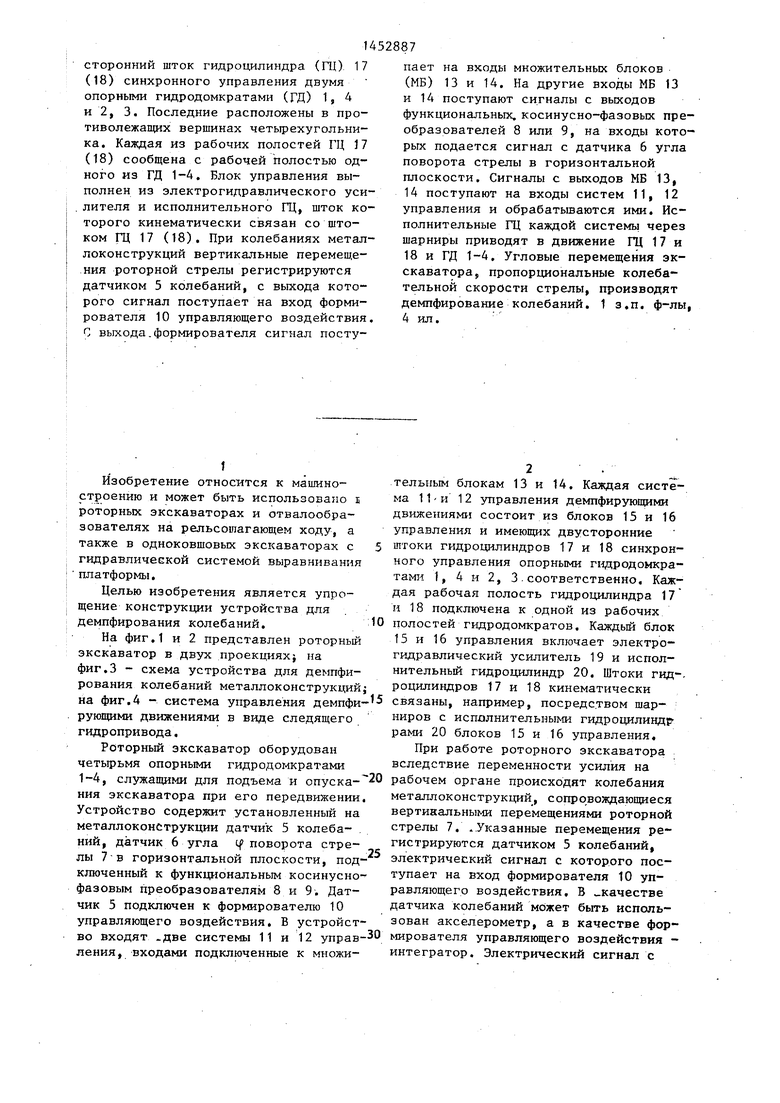
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для демпфирования колебаний металлоконструкций роторного экскаватора | 1982 |
|
SU1062346A1 |
| Устройство для гашения колебаний металлоконструкций роторного экскаватора | 1985 |
|
SU1271941A1 |
| Роторный экскаватор | 1985 |
|
SU1271942A1 |
| Устройство для гашения колебаний металлоконструкций роторного экскаватора | 1987 |
|
SU1474222A1 |
| Устройство виброзащиты кабины машиниста экскаватора | 1987 |
|
SU1537774A1 |
| Устройство для гашения колебаний металлоконструкций роторного экскаватора | 1980 |
|
SU899762A1 |
| Подвеска стрелы рабочего органа роторного экскаватора | 1988 |
|
SU1709022A1 |
| Роторный экскаватор | 1988 |
|
SU1609880A1 |
| Устройство для гашения колебаний металлоконструкций машин для открытых горных работ | 1982 |
|
SU1065551A1 |
| Рабочее оборудование роторного экскаватора | 1988 |
|
SU1609879A1 |
Изобретение относится к машиностроению и м.й. использовано в роторных экскаваторах и отвалообразова- телях на рельсошагающем сХОДу. Цель - упрощение конструкции устр-на для демпфирования колебаний. Для этого устр-во содержит системы 11 и 12 управления демпфирующим движением, каждая из которых выполнена из блока 15 (16) управления и имеющего дву:я (Л i4 Сл ю ЭО ч аг.2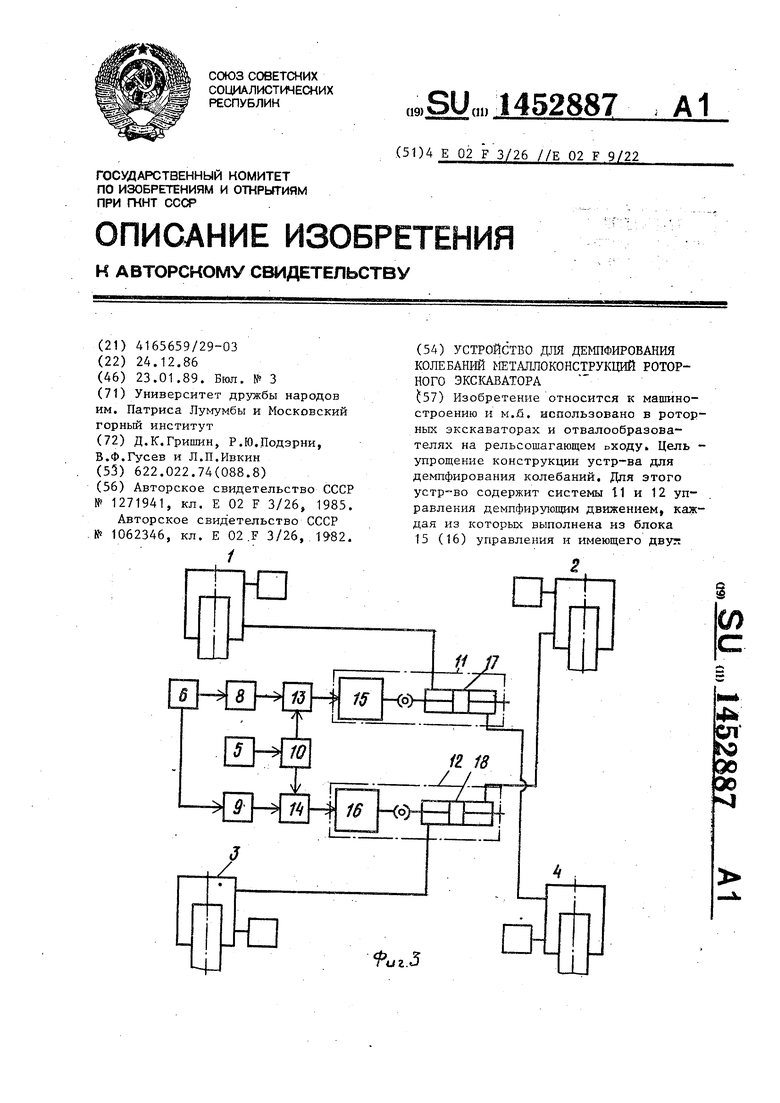
}
Изобретение относится к машиностроению и может быть использовано Е роторных экскаваторах и отвалообра- зователях на рельсошагающем ходу, а также в одноковшовых экскаваторах с гидравлической системой выравнивания платформы.
Целью изобретения является упрощение конструкции устройства для демпфирования колебаний.
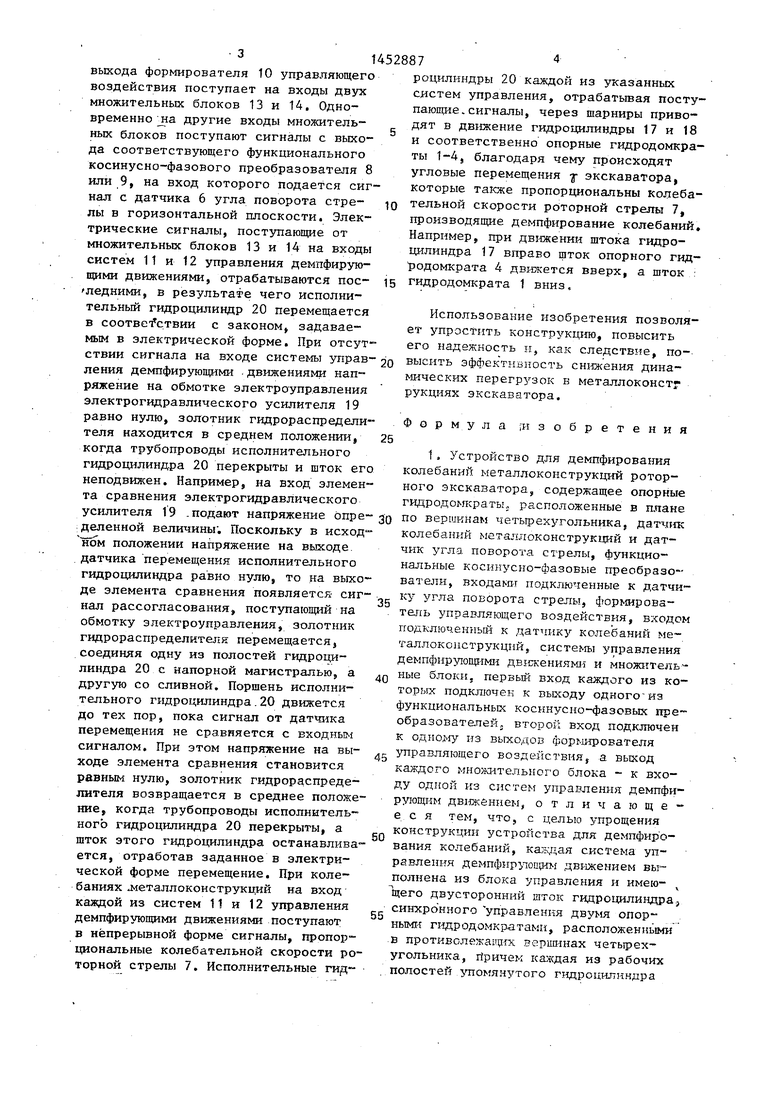
На фиг.1 и 2 представлен роторньй экскаватор в двух проекциях на фиг.З - схема устройства для демпфирования колебаний металлоконструкций на фиг.4 - система управления демпфирующими движениями в виде следящего гидропривода.
Роторный экскаватор оборудован четырьмя опорными гидродомкратами 1-4, слзокащими для подъема и опускания экскаватора при его передвижении Устройство содержит установленный на металлоконструкции датчик 5 колебаний, датчик 6 угла Ц поворота стрелы 7-в горизонтальной плоскости, подключенный к функциональным косинусно- фазовым преобразователям 8 и 9. Датчик 5 подключен к формирователю 10 управляющего воздействия. В устройство входят -две системы 11 и 12 управления, входами подключенные к множи
5
Ю
5
О О
5
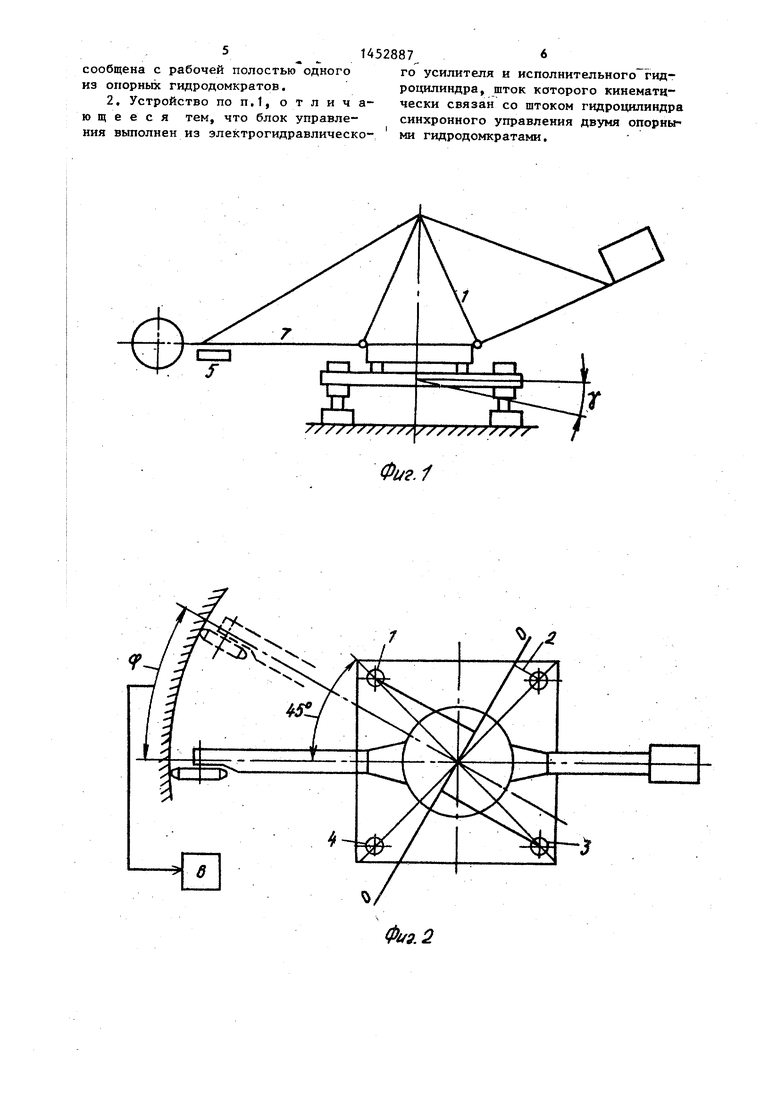
тельным блокам 13 и 14. Каждая систе - ма 11 - и 12 управления демпфирующими движениями состоит из блоков 15 и 16 управления и имеющих двусторонние штоки гидроцилиндров 17 и 18 синхронного управления опорными гидродомкратами 1, 4 и 2, 3.соответственно. Каждая рабочая полость гидроцилиндра 17 и 18 подключена к одной из рабочих полостей гидродомкратов. Каждый блок 15 и 16 управления включает электрогидравлический усилитель 19 и исполнительный гидроцилиндр 20. Штоки гид-. роцилиндров 17 и 18 кинематически связаны, например, посредством шарниров с исполнительными гидроцилиндр рами 20 блоков 15 и 16 управления.
При работе роторного экскаватора вследствие переменности усилия на рабочем органе происходят колебания металлоконструкций, сопровождающиеся вертикальными перемещениями роторной стрелы 7. ..Указанные перемещения регистрируются датчиком 5 колебаний, электрический сигнал с которого поступает на вход формирователя 10 управляющего воздействия. В качестве датчика колебаний может быть использован акселерометр, а в качестве формирователя управляющего воздействия - интегратор. Электрический сигнал с
выхода формирователя 10 управляющего воздействия поступает на входы двух множительных блоков 13 и 14. Одновременно jia другие входы множительных блоков поступают сигналы с выхода соответствующего функционального косинусно-фазового преобразователя 8 или 9, на вход которого подается сигнал с датчика 6 угла поворота стрелы в горизонтальной плоскости. Электрические сигналы, поступающие от множительных блоков 13 и 14 на входы систем 11 и 12 управления демпфирующими движениями, отрабатываются пос- ледними, в результате чего исполнительный гидроцилиндр 20 перемещается в cooтвcfcтвии с законом задаваемым в электрической форме. При отсут
1452887
роцилиндры 20 каждой из указанных слстем управления, отрабатьгоая посту пающие, сигналы, через шарниры приво- g дят в движение гидроцилиндры 17 и 18 и соответственно опорные гидродомкра ты 1-4, благодаря чему происходят угловые перемещения у экскаватора, которые также пропорциональны колеба
10 тельной скорости роторной стрелы 7, производящие демпфирование колебаний Например, при движении штока гидроцилиндра 17 вправо щток опорного гид- родомкрата 4 двта-ется вверх, а шток
15 г идродомкрата 1 вниз.
Использование изобретения позволяет упростить конструкцию, повысить
ствии сигнала на входе системь: управ- п выситГэф6° ч .о °- ления демпфирующими .движениями нап ° ческих сношения дина- ряжение на Обмотке злектроупразления Т.:.Т.T.i:::i:;i м-оконстг электрогидравлического усилителя 19 равно нулю, золотник гидрораспредели- теля находится в среднем положении, 25 когда трубопроводы исполнительного гидроцилиндра 20 перекрыты и шток его неподвижен. Например, на вход элемента сравнения электрогидравлического
Формула ;и зобретени
1, Устройство для демпфирования колебаний металлоконструкций роторного экскаватора, содержащее опорные гидродомкраты., расположенные в плане
усилителя Г9 .пода. „апр™,е„„е .пра-з, .е T.f деленной величины . Пог1сплт. « .г, . .i ольника, датчик
деленной величины; Поскольку в исход ном положении напряжение на выходе. датчика перемещения исполнительного гидроцилиндра равно нулю, то на выходе элемента сравнения появляется- сиг- нал рассогласования, поступающий на обмотку электроуправления, золотник гидрораспределителя перемещается, соединяя одну из полостей гидроцилиндра 20 с напорной магистралью, а другую со сливной. Поршень исполнительного гвдроцилиндра.20 движется до тек пор, пока сигнал от датч11ка перемещения не сравняется с входным сигналом. При этом напряжение на выходе элемента сравнения становится равным нулю, золотник гидрораспределителя возвращается в среднее положение, когда трубопроводы исполнительного гидроцилиндра 20 перекрыты, а шток этого гидроцилиндра останавливается, отработав заданное в электрической форме перемещение. При колебаниях металлоконструкций на вход каждой из систем 11 и 12 управления демпфирующими движениями поступают в непрерывной форме сигналы, пропорциональные колебательной скорости роторной стрелы 7. Исполнительные
колебаний металлоконструкций и датчик угла поворота стрелы, функциональные косинусно-фазовые преобразователи, входатг подключенные к датчи- 32 ку угла поворота стрелы, формирователь управляющего воздействия, входом
подключенный к датт1ику колебаний металлоконструкций, системы управления демпфирующими дв.чжениям и множитель- 40 ные блоки, первый вход каждого из которых подключен к выходу одного-из функциональных косинусно-фазовых пре- образоватепейз второй вход подключен к одному из выходов формирователя 45 управляющего воздействия, а выход каждого множительного блока - к входу одной из систем управления демпфирующим движением, отличающе- е с я тем, что, с целью упрощения gQ конструкции устройства для демпфирования колебаний, ка;адая система уп- равления демпфнрз, движением вы- полнена из блока управления и имеющего двусторонний шток гидроцилиродра, gg синхронного управления двумя опорными гидродомкратами, расположеннь ми в противолежащте верип-шах четырехугольника, йричек калодая из рабочих . полостей ттомянутого педроцилнндра
1452887
роцилиндры 20 каждой из указанных слстем управления, отрабатьгоая поступающие, сигналы, через шарниры приво- дят в движение гидроцилиндры 17 и 18 и соответственно опорные гидродомкраты 1-4, благодаря чему происходят угловые перемещения у экскаватора, которые также пропорциональны колебательной скорости роторной стрелы 7, производящие демпфирование колебаний. Например, при движении штока гидроцилиндра 17 вправо щток опорного гид- родомкрата 4 двта-ется вверх, а шток
г идродомкрата 1 вниз.
выситГэф6° ч .о ° ческих сношения дина- Т.:.Т.T.i:::i:;i м-оконстг
Формула ;и зобретени
выситГэф6° ч .о °- ческих сношения дина- Т.:.Т.T.i:::i:;i м-оконстг
1, Устройство для демпфирования колебаний металлоконструкций роторного экскаватора, содержащее опорные гидродомкраты., расположенные в плане
.е T.f . .i ольника, датчик
з, .е T.f . .i ольника, датчик
колебаний металлоконструкций и датчик угла поворота стрелы, функциональные косинусно-фазовые преобразователи, входатг подключенные к датчи- 32 ку угла поворота стрелы, формирователь управляющего воздействия, входом
подключенный к датт1ику колебаний металлоконструкций, системы управления демпфирующими дв.чжениям и множитель- 0 ные блоки, первый вход каждого из которых подключен к выходу одного-из функциональных косинусно-фазовых пре- образоватепейз второй вход подключен к одному из выходов формирователя 5 управляющего воздействия, а выход каждого множительного блока - к входу одной из систем управления демпфирующим движением, отличающе- е с я тем, что, с целью упрощения Q конструкции устройства для демпфирования колебаний, ка;адая система уп- равления демпфнрз, движением вы- полнена из блока управления и имеющего двусторонний шток гидроцилиродра, g синхронного управления двумя опорными гидродомкратами, расположеннь ми в противолежащте верип-шах четырехугольника, йричек калодая из рабочих . полостей ттомянутого педроцилнндра
сообщена с рабочей полостью одного из опорных гидродомкратов.
го усилителя и исполнительного гидроцилиндра, шток которого кинематически связан со штоком гидроцилиндра синхронного управления двумя опорны ми гидродомкратами.
.-/
Фи9.2
15,16
u
Фиг,
| Устройство для гашения колебаний металлоконструкций роторного экскаватора | 1985 |
|
SU1271941A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для демпфирования колебаний металлоконструкций роторного экскаватора | 1982 |
|
SU1062346A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
