Изобретение относится к экскаваторостроению, а именно к роторным экскаваторам, применяемым на открытых горных разработках и в строительстве.
Цель изобретения - повышение надежности и долговечности металлоконструкций за счет снижения затрат энергии на гашение колебаний.
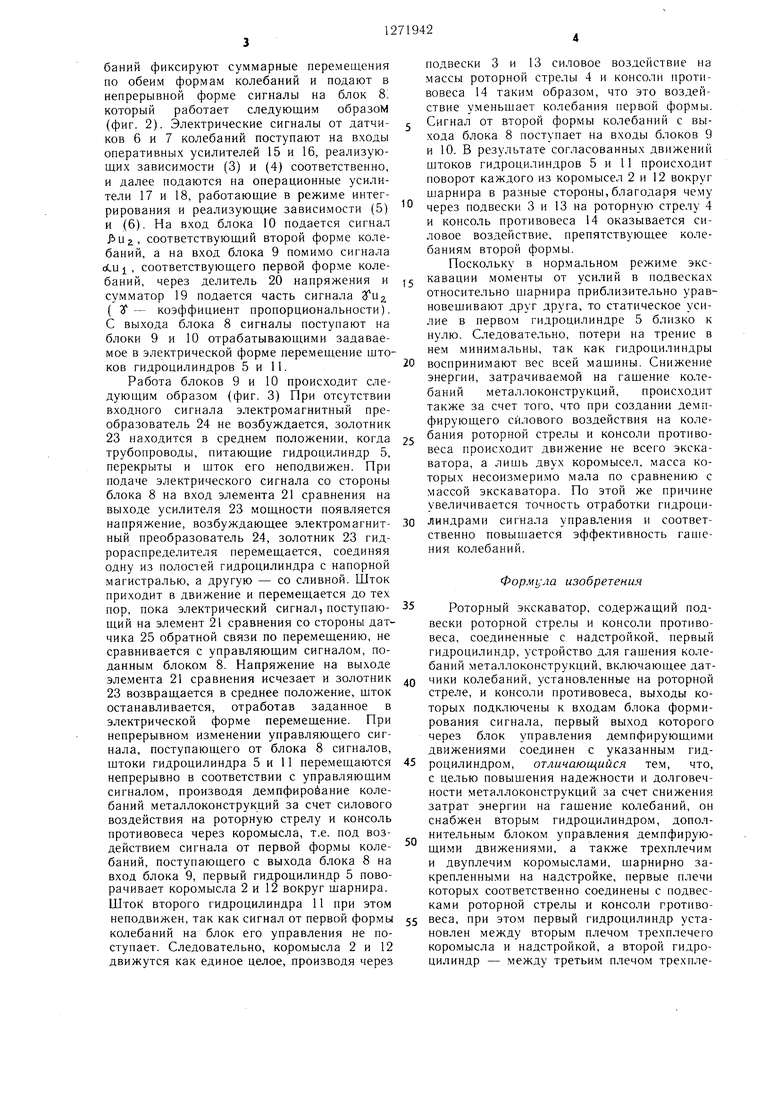
На фиг. 1 представлена схема роторного экскаватора с устройством для гашения колебаний металлоконструкций; на фиг. 2 - принципиальная схема формирователя сигналов; на фиг. 3 - принципиальная схема блока управления демпфирующими движениями.
Роторный экскаватор содержит шарнирно связанное с надстройкой 1 трехплечее коромысло 2, одно из плеч которого саединено с подвеской 3 роторной стрелы 4, а другое через гидроцилиндр 5 - с надстройкой 1. Установленные на роторной стреле и консоли противовеса датчики 6 и 7 колебаний соединены с входами блока 8 формирования сигналов, выходы которого соответственно подключены к блокам 9 и 10 управления демпфирующими движениями гидроцилиндров 5 и 11. Одно из плеч шарнирпо связанного с надстройкой двуплечего коромысла 12 соединено с подвеской 13 консоли противовеса 14. Свободные плечи коромысел 2 и 12 связаны одно с другим при ПОМОШ.И второго гидроцилиндра 11.
Блок 8 (фиг. 2) выполнен по схеме двухполосного фильтра, включающего инвертор, операционные усилители 15-19 и делитель 20 напряжения.
Блок 9 управления демпфирующими движениями гидроцилиндра 5 (фиг. 3) содержит элемент 21 сравнения, усилитель 22 мощности.,золотник 23 гидрораспределителя с электромагнитным преобразователем 24, датчик 25 обратной связи по перемещению из тока гидроцилиндра, в качестве которого используется потенциометр. Аналогичную структуру имеет блок 10.
Принцип работы блока основан на следующем, Математическая модель колебаний металлоконструкций экскаватора с учетом демпфирующего воздействия со стороны гидроцилиндров 5 и 11 имеет следующий вид
a«Xi-i-B,,x,-f B,jXi+ ., + eiU2 0; агаХ2.+ BiiX,+ Вг, Йг.1Ц+ iz U 0; (Я
где х и Xz - вертикальные перемещения роторной стрелы и противовесной консоли соответственно; 2- составляющие демпфирующих перемещений щтоков гидроцилиндров 5 и 11 по каждой из форм колебаний;
а, Ь, ci;e -постоянные, зависящие от геометрии и массы элементов конструкций.
Из теории колебаний известно, что пере5 мещения х и Х2 представляются как суммы
(Я сг)
X1 X 1 -Ь X /;
(1)
(21
I J / ,.l/ С
Хг к, X, + к Xi , (2)
где х , - гармонические составляющие, соответствующие первой и второй форме колебаний; Ki,K2-коэффициенты распределения амплитуд по данным формам, вычисляемые из характеристического
уравнения системы (1) без учета Ui и и.
Поскольку сигналы, соответствующие
перемещениям xj и х, известны, так как
они поступают от датчиков 6 и 7, то из равенств (2) можно найти и xf, т.е.
х1) .- Х.2-к.гХ1
(3)
Л J - - - ;
K,-K
.g) Xz-KtXt
(4)
,Г-i -эффект-раздельного демпфирования каждой из форм колебаний имеет место, если составляющие демпфирующих перемещений штоков гидроцилиндров 5 и 11 изменяются по законам
iui 5x
(5)
), (6)
гдеЛи р - постоянные коэффициенты.
Этот эффект объясняется тем, что если в систему (1) подставить соотношения (3) - (6), то в уравнениях колебаний появляются члены, содержащие первые производные от перемещений, что эквивалентно введению вязкого сопротивления колебательному движению.
Экскаватор работает следующим образом При взаимодействии рабочего органа с забоем возникают переменные силы, которые возбуждают в металлоконструкциях
колебания, сопровождающиеся перемещениями роторной стрелы 4 и консоли противовеса 14 за счет деформации их подвесок и надстройки 1. Наибольщую опасность представляют две главные формы колебаний. При колебаниях первой формы происходит движение роторной стрелы 4 и консоли противовеса 14 в противоположные от положения равновесия стороны, например, роторная стрела 4 движется вниз, а консоль противовеса - вверх (показано
пунктиром). Колебания второй формы сопровождаются одновременным движение.м роторной стрелы и противовесной консоли либо вниз, либо вверх. Датчики 6 и 7 колебаний фиксируют суммарные перемещения по обеим формам колебаний и подают в непрерывной форме сигналы на блок 8. который работает следующим образом (фиг. 2). Электрические сигналы от датчиков 6 и 7 колебаний поступают на входы оперативных усилителей 15 и 16, реализующих зависимости (3) и (4) соответственно, и далее подаются на операционные усилители 17 и 18, работающие в режиме интегрирования и реализующие зависимости (5) и (6). На вход блока 10 подается сигнал JbUj., соответствующий второй форме колебаний, а на вход блока 9 помимо сигнала oLu i , соответствующего первой форме колебаний, через делитель 20 напряжения и сумматор 19 подается часть сигнала ЗГи ( 2Г- коэффициент пропорциональности). С выхода блока 8 сигналы поступают на блоки 9 и 10 отрабатывающими задаваемое в электрической форме перемещение щтоков гидроцилиндров 5 и 11.
Работа блоков 9 и 10 происходит следующим образом (фиг. 3) При отсутствии входного сигнала электромагнитный преобразователь 24 не возбуждается, золотник 23 находится в среднем положении, когда трубопроводы, питающие гидроцилиндр 5, перекрыты и щток его неподвижен. При подаче электрического сигнала со стороны блока 8 на вход элемента 21 сравнения на выходе усилителя 23 мощности появляется напряжение, возбуждающее электромагнитный преобразователь 24, золотник 23 гидрораспределителя перемещается, соединяя одну из полос1ей гидроцилиндра с напорной магистралью, а другую - со сливной. Шток приходит в движение и перемещается до тех пор, пока электрический сигнал,поступающий на элемент 21 сравнения со стороны датчика 25 обратной связи по перемещению, не сравнивается с управляющим сигналом, поданным блоком 8. Напряжение на выходе элемента 21 сравнения исчезает и золотник 23 возвращается в среднее положение, щток останавливается, отработав заданное в электрической форме перемещение. При непрерывном изменении управляющего сигнала, поступающего от блока 8 сигналов, щтоки гидроцилиндра 5 и 11 перемещаются непрерывно в соответствии с управляющим сигналом, производя демпфирование колебаний металлоконструкций за счет силового воздействия на роторную стрелу и консоль противовеса через коромысла, т.е. под воздействием сигнала от первой формы колебаний, поступающего с выхода блока 8 на вход блока 9, первый гидроцилиндр 5 поворачивает коромысла 2 и 12 вокруг шарнира. Шток второго гидроцилиндра 11 при этом неподвижен, так как сигнал от первой формы колебаний на блок его управления не поступает. Следовательно, коромысла 2 и 12 движутся как единое целое, производя через
подвески 3 и 13 силовое воздействие на массы роторной стрелы 4 и консоли противовеса 14 таким образом, что это воздействие уменьшает колебания первой формы. Сигнал от второй формы колебаний с выхода блока 8 поступает на входы блоков 9 и 10. В результате согласованных движений щтоков гидроцилиндров 5 и 11 происходит поворот каждого из коромысел 2 и 12 вокруг шарнира в разные стороны,благодаря чему через подвески 3 и 13 на роторную стрелу 4 и консоль противовеса 14 оказывается силовое воздействие, препятствующее колебаниям второй формы.
Поскольку в нормальном режиме экскавации моменты от усилий в подвесках относительно шарнира приблизительно уравновешивают друг друга, то статическое усилие в первом гидроцилиндре 5 близко к нулю. Следовательно, потери на трение в нем минимальны, так как гидроцилиндры воспринимают вес всей машины. Снижение энергии, затрачиваемой на гашение колебаний металлоконструкций, происходит также за счет того, что при создании демпфирующего силового воздействия на колебания роторной стрелы и консоли противовеса происходит движение не всего экскаватора, а лишь двух коромысел, масса которых несоизмеримо мала по сравнению с массой экскаватора. По этой же причине увеличивается точность отработки гидроцилиндрами сигнала управления и соответственно повышается эффективность гашения колебаний.
Формула изобретения
Роторный экскаватор, содержащий подвески роторной стрелы и консоли противовеса, соединенные с надстройкой, первый гидроцилиндр, устройство для гашения колебаний металлоконструкций, включающее датчики колебаний, установленные на роторной стреле, и консоли противовеса, выходы которых подключены к входам блока формирования сигнала, первый выход которого через блок управления демпфирующими движениями соединен с указанным гидроцилиндром, отличающийся тем, что, с целью повышения надежности и долговечности металлоконструкций за счет снижения затрат энергии на гашение колебаний, он снабжен вторым гидроцилиндром, дополнительным блоком управления демпфирующими движениями, а также трехплечим и двуплечим коромыслами, щарнирно закрепленными на надстройке, первые плечи которых соответственно соединены с подвесками роторной стрелы и консоли противовеса, при этом первый гидроцилиндр установлен между вторым плечом трехплечего коромысла и надстройкой, а второй гидроцилиндр - между третьим плечом трехплечего коромысла и вторым плечом двуплечего коромысла, причем вход дополнительного блока управления демпфирующими движениями соединен с вторым выходом блока формирования сигнала, а выход - с вторым гидроцилиндром.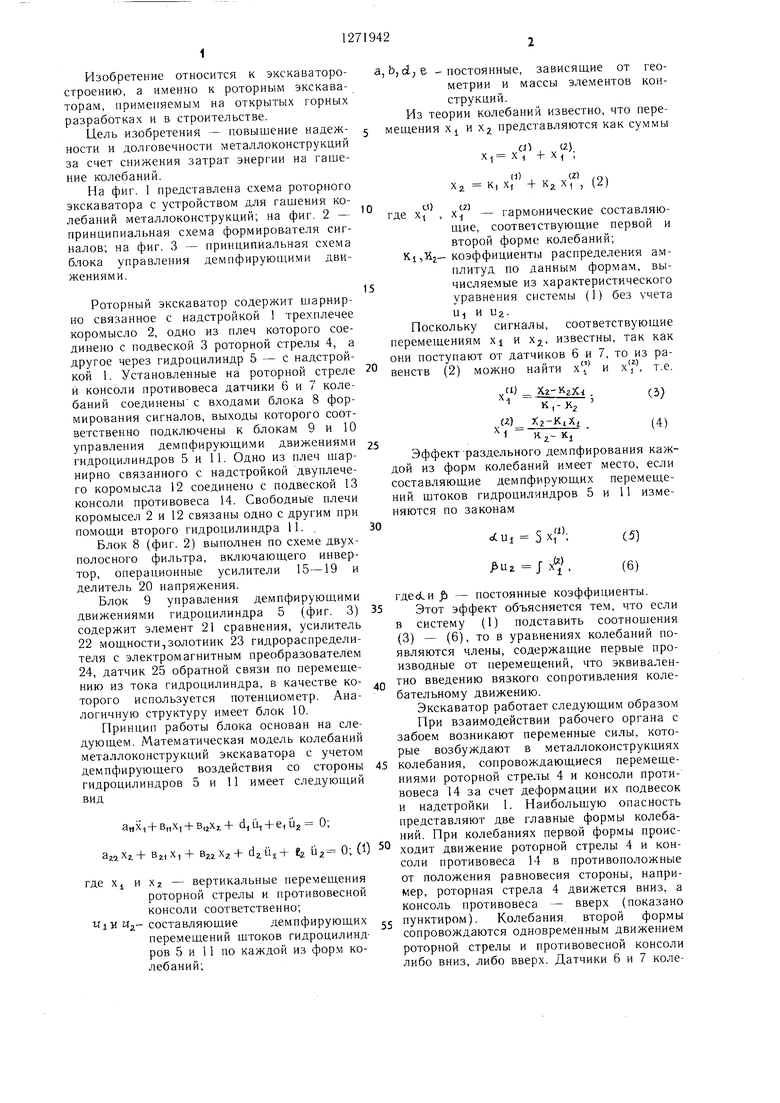
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для гашения колебаний металлоконструкций роторного экскаватора | 1980 |
|
SU899762A1 |
| Устройство для гашения колебаний металлоконструкций роторного экскаватора | 1985 |
|
SU1271941A1 |
| Устройство для подвески стрелы рабочего органа роторного экскаватора | 1982 |
|
SU1087622A1 |
| Устройство для демпфирования колебаний металлоконструкций роторного экскаватора | 1982 |
|
SU1062346A1 |
| Роторный экскаватор | 1977 |
|
SU787559A1 |
| Роторный экскаватор | 1988 |
|
SU1609880A1 |
| Роторный экскаватор | 1985 |
|
SU1258944A1 |
| Устройство для гашения колебаний металлоконструкций роторного экскаватора | 1987 |
|
SU1474222A1 |
| Устройство для демпфирования колебаний металлоконструкций роторного экскаватора | 1986 |
|
SU1452887A1 |
| Устройство для гашения колебаний металлоконструкций машин для открытых горных работ | 1982 |
|
SU1065551A1 |

| Роторный экскаватор | 1983 |
|
SU1138460A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Устройство для гашения колебаний металлоконструкций роторного экскаватора | 1980 |
|
SU899762A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
