(54) УСТРОЙСТВО ДЛЯ ГАШЕНИЯ КОЛЕБАНИЙ МЕТАЛЛОКОНСТРУКЦИЙ РОТОРНОГО ЭКСКАВАТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для гашения колебаний металлоконструкций роторного экскаватора | 1985 |
|
SU1271941A1 |
| Роторный экскаватор | 1985 |
|
SU1271942A1 |
| Устройство для гашения колебаний металлоконструкций роторного экскаватора | 1987 |
|
SU1474222A1 |
| Устройство для демпфирования колебаний металлоконструкций роторного экскаватора | 1982 |
|
SU1062346A1 |
| Устройство виброзащиты кабины машиниста экскаватора | 1987 |
|
SU1537774A1 |
| Устройство для демпфирования колебаний металлоконструкций роторного экскаватора | 1986 |
|
SU1452887A1 |
| Подвеска стрелы рабочего органа роторного экскаватора | 1988 |
|
SU1709022A1 |
| Роторный экскаватор | 1977 |
|
SU787559A1 |
| Рабочее оборудование роторного экскаватора | 1988 |
|
SU1609879A1 |
| Устройство для гашения колебаний металлоконструкций роторного экскаватора | 1990 |
|
SU1717732A1 |
I
Изобретение относится к горному машиностроению, а именно к устройствам для гашения колебаний металлоконструкций роторного экскаватора или отвалообразователя.
Известно устройство для гашения колебаний металлоконструкций роторного экскаватора, содержащее датчики усилия, дифференцирующее звено, систему управления приводом поворота 1.
Однако это устройство обеспечивает гашение колебаний в металлоконструкции роторного экскаватора только за счет формирования управляющего воздействия на привод поворотатаким образом, чтобы скорость поворотной, платформы препятствовала колебаниям.
Известно также устройство для гашения колебаний металлоконструкций роторного экскаватора, в котором помимо воздействия на привод поворота эффект гашения достигается за счет соответствующих перемещений надстройки роторного экскаватора. Обычно для отработки заданных перемещений используют следящий гидропривод с силовым гидравлическим органом гидрораспределителем и датчиком обратной связи
по перемещению. Устройство содержит датчики усилия, установленные на роторной стреле и стреле противовеса, программный блок, механизм перемещения надстройки, оборудованный силовым гидравлически.м органом с системой управления демпфирующими движениями, включающий гидрораспределитель и датчик обратной связи по перемещению. Кроме того, устройство содержит систему управления приводом поворота с соответствующими связями 2. Однако в том случае, когда для гашения колебаний и выполнения рабочих движений применяется один и тот же гидравлический силовой орган, эффективность гашения колебаний при помощи этого устройства недостаточна потому, что требуемые перемещения гидравлического силоврго органа гораздо меньше, чем для выполнений рабочих движений. Например, для гашения колебаний металлоконструкций роторного экскаватора Или отвалообразователя за счет 2Q поворотов верхней части в вертикальной плоскости требуемые перемещения штока гидроцилиндра составляют доли сантиметра, в то время как для рабочего движения (в данном случае изменения угла наклона
верхней части машины) необходимы перемещения порядка десятков и сотен сантиметров.
В то же время для эффективного гашения колебаний металлоконструкций требуется высокая точность измерения сигнала обратной связи по малым (демпфирующим) перемещениям, что в известных устройствах затруднительно из-за наличия больших рабочих перемещений, усложняющих выделение и точное измерение малых (демпфирующих) перемещений в том случае, когда обратная связь осуществляется непосредственно через гидравлический силовой орган. Недостаточная точность измерения сигнала обратной связи по демпфирующим перемещениям приводит к погрешностям при отработке гидравлическим силовым органом демпфирующего воздействия, снижает эф(()сктивность гашения колебаний и может служить причиной динамической неустойчивости устройства.
,ель изобретения - повышение эффективности га прения колебаний металлоконструкций роторного экскаватора за счет повыпюния точности отработки заданных демпфирующих перемещений.
Указанная цель достигается тем, что устройство снабжено дополнительным гидроцилиидром, одна из полостей которого соединена с силовым гидравлическим органом, другая - с гидрораспределителем, а шток дополнительного гидроцилиндра соединен с датчиком обратной связи но перемещению, причем площади рабочих поверхностей порщня допо.пнительного гидроцилиндра в 5-10 раз меньше соответствующих площадей порщня гидравлического силового органа.
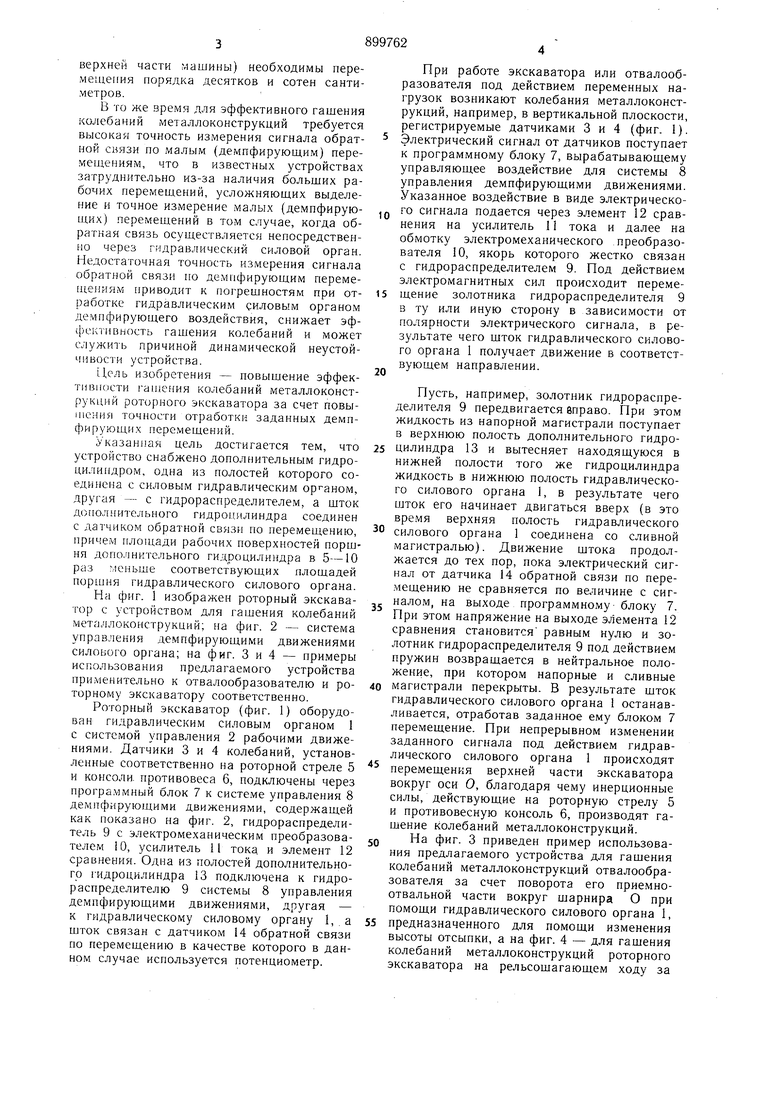
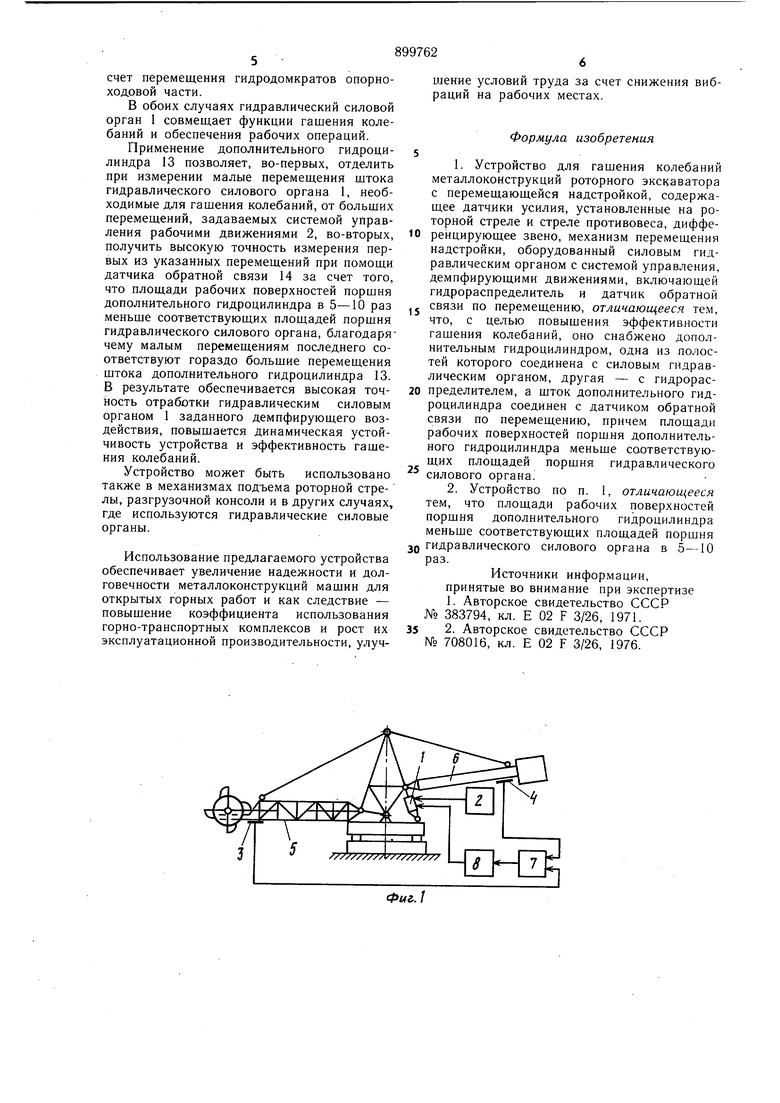
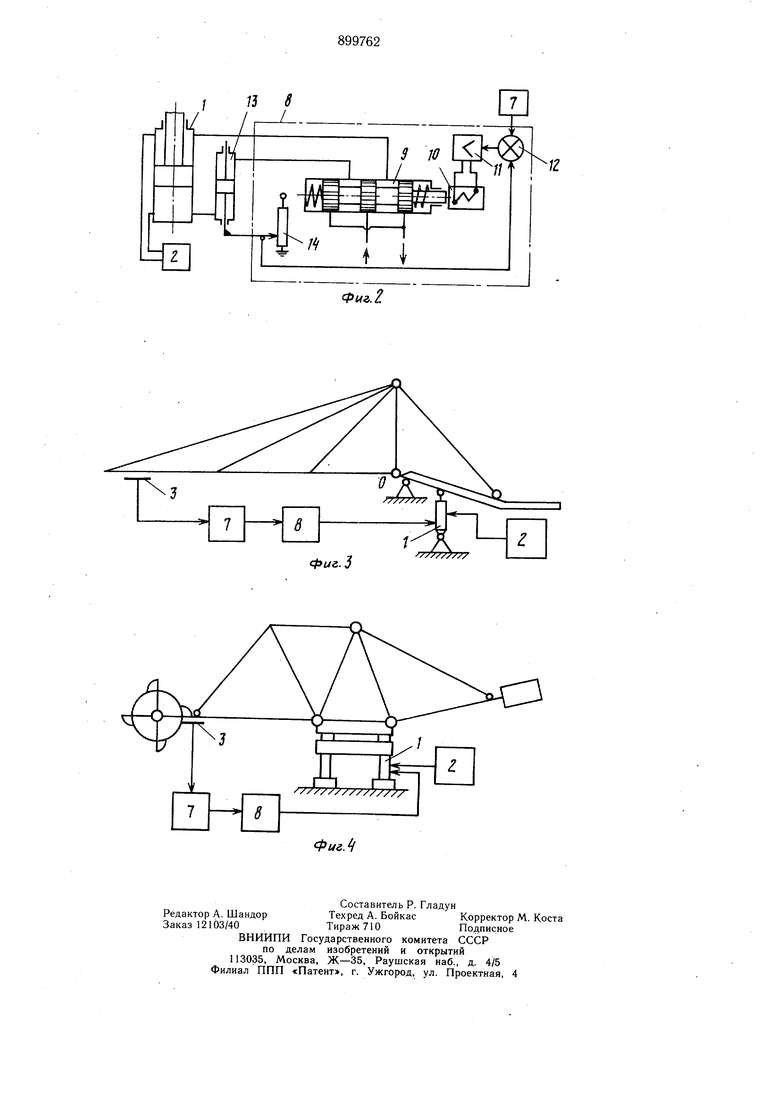
На фиг. 1 изображен роторный экскаватор с устройством для гашения колебаний металлоконструкций; на фиг. 2 - система управления демпфирующими движениями силового органа; на фиг. 3 и 4 - примеры использования предлагаемого устройства применительно к отвалообразователю и роторному экскаватору соответственно.
Роторный экскаватор (фиг. 1) оборудован гидравлическим силовым органом 1 с системой управления 2 рабочими движениями. Датчики 3 и 4 колебаний, установленные соответственно на роторной стреле 5 и консоли противовеса 6, подключены через программный блок 7 к системе управления 8 демпфирующими движениями, содержащей как показано на фиг, 2, гидрораспределитель 9 с электромеханическим преобразователем 10, усилитель 11 тока и элемент 12 сравнения. Одна из полостей дополнительного гидроцилиндра 13 подключена к гидрораспределителю 9 системы 8 управления демпфирующими движениями, другая - к гидравлическому силовому органу 1,.а щток связан с датчиком 14 обратной связи по перемещению в качестве которого в данном случае используется потенциометр.
При работе экскаватора или отвалообразователя под действием переменных нагрузок возникают колебания металлоконструкций, например, в вертикальной плоскости, регистрируемые датчиками 3 и 4 (фиг. 1).
Электрический сигнал от датчиков поступает к программному блоку 7, вырабатывающему управляющее воздействие для системы 8 управления демпфирующими движениями. Указанное воздействие в виде электрическо,, го сигнала подается через элемент 12 сравнения на усилитель 11 тока и далее на обмотку электромеханического .преобразователя 10, якорь которого жестко связан с гидрораспределителем 9. Под действием электромагнитных сил происходит перемещение золотника гидрораспределителя 9 в ту или иную сторону в зависимости от полярности электрического сигнала, в результате чего щток гидравлического силового органа 1 получает движение в соответствующем направлении.
Пусть, например, золотник гидрораснределителя 9 передвигается вправо. При этом жидкость из напорной магистрали поступает в верхнюю полость дополнительного гидроцилиндра 13 и вытесняет находящуюся в нижней полости того же гидроцилиндра жидкость в нижнюю полость гидравлического силового органа 1, в результате чего шток его начинает двигаться вверх (в это вре.мя верхняя полость гидравлического
0 силового органа 1 соединена со сливной магистралью). Движение штока продолжается до тех пор, пока электрический сигнал от датчика 14 обратной связи по перемещению не сравняется по величине с сигналом, на выходе программному- блоку 7. При этом напряжение на выходе элемента 12 сравнения становится равным нулю и золотник гидрораспределителя 9 под действием пружин возвращается в нейтральное положение, при котором напорные и сливные
0 магистрали перекрыты. В результате щток гидравлического силового органа 1 останавливается, отработав заданное ему блоком 7 перемещение. При непрерывном изменении заданного сигнала под действием гидравлического силового органа 1 происходят перемещения верхней части экскаватора вокруг оси О, благодаря чему инерционные силы, действующие на роторную стрелу 5 и противовесную консоль 6, производят гащение колебаний металлоконструкций.
Q На фиг. 3 приведен пример использования предлагаемого устройства для гашения колебаний металлоконструкций отвалообразователя за счет поворота его приемноотвальной части вокруг шарнира О при помощи гидравлического силового органа 1,
предназначенного для помощи изменения высоты отсыпки, а на фиг. 4 - для гашения колебаний металлоконструкций роторного экскаватора на рельсошагающем ходу за
счет перемещения гидродомкратов опорноходовой части.
В обоих случаях гидравлический силовой орган 1 совмещает функции гашения колебаний и обеспечения рабочих операций.
Применение дополнительного гидроцилиндра 13 позволяет, во-первых, отделить при измерении малые перемещения штока гидравлического силового органа 1, необходимые для гашения колебаний, от больших перемещений, задаваемых системой управления рабочими движениями 2, во-вторых, получить высокую точность измерения первых из указанных перемещений при помощи датчика обратной связи 14 за счет того, что площади рабочих поверхностей поршня дополнительного гидроцилиндра в 5-10 раз меньше соответствующих площадей поршня гидравлического силового органа, благодарячему малым перемещениям последнего соответствуют гораздо больщие перемещения щтока дополнительного гидроцилиндра 13. В результате обеспечивается высокая точность отработки гидравлическим силовым органом 1 заданного демпфирующего воздействия, повышается динамическая устойчивость устройства и эффективность гашения колебаний.
Устройство может быть использовано также в механизмах подъема роторной стрелы, разгрузочной консоли и в других случаях, где используются гидравлические силовые органы.
Использование предлагаемого устройства обеспечивает увеличение надежности и долговечности металлоконструкций машин для открытых горных работ и как следствие - повышение коэффициента использования горно-транспортных комплексов и рост их эксплуатационной производительности, улучшение условий труда за счет снижения вибраций на рабочих местах.
Формула изобретения
силового органа.
гидравлического силового органа в 5-10 раз.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 383794, кл. Е 02 F 3/26, 1971.
