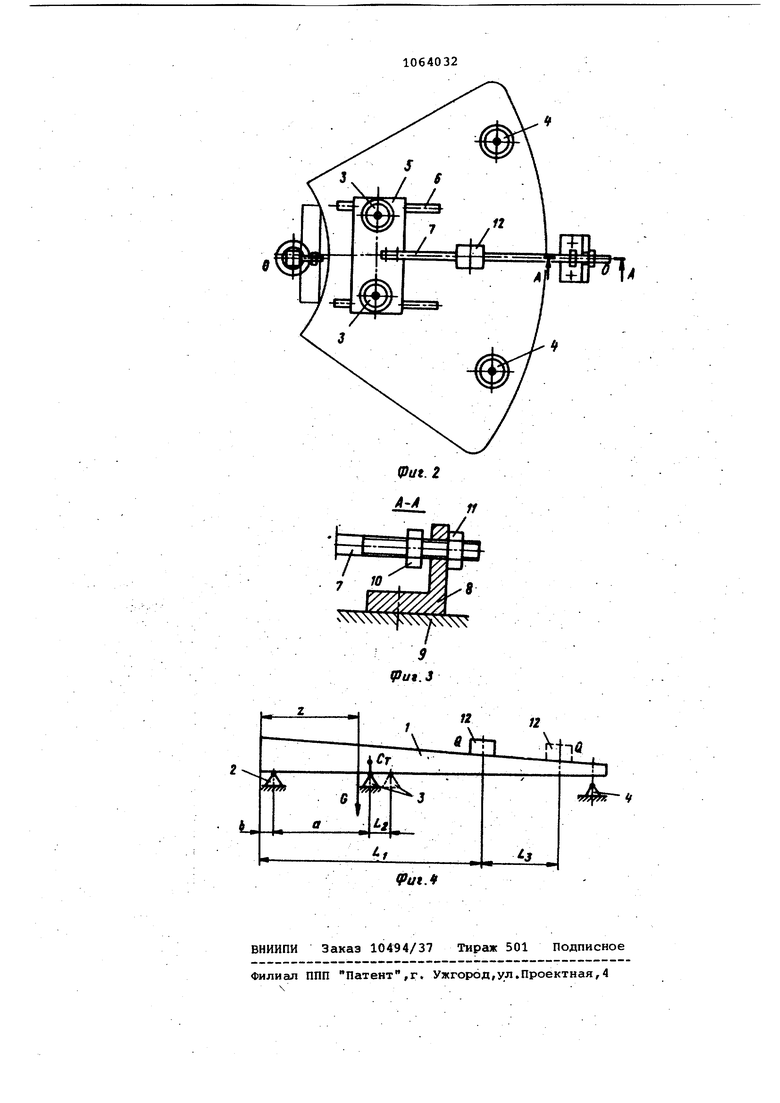
Изобретение относится к гидромаш ностроению и может быть использован для определения веса лопасти рабоче го колеса гидротурбины в условиях ГЭС. Известен способ определения веса лопасти, например вертолета, заключающийся в том, что лопасть с известным дополнительным грузсм разме щают на нечетном ислё опор и находят смещение фактического центра тяжести лопасти путем определения ее равновесного положения на средне . опоре ij . Однако при таком способе необходим двукратный поиск равновесного положения непосредственно детали и системы деталь - груз. В поискахh равновесного состояния производят непрерывное перемещение детали отно сительно опоры,т.е. для лопасти гид ротурбины,вес которой достигает нес кольких тонн,каждое такое перемацен весьма трудоемкая и небезопасная оп рация, связанная с возможностью опр кидывания лопасти при опоры, Цель изобретения - обеспечение безопасности работ и;повышение точности определения веса. Поставленная цель достигается тем, что в способе определения веса лопасти рабочего колеса гидротурбин заключающемся в тем, что лопасть с известным дополнительным грузсм размещают на нечетном числе опор и находят смещение . фактического цен ра тяжести лопасти, путем определени ее равновесного положения иА среяне опоре, последнюю предварительно раз мадают под расчетным центре тяжести лопасти, а ее равновеснее положение определяют путем после«овател ного перемещения грузд вДоль оси лопасти и средней опоры с освобождением ее между перемещениями, и по величинам перемещений опоры и груза судят о смещении фактического центр тяжести лопасти. На фиг. 1 показано устройство для реализации предлагаемого способа; на фиг. 2 - то же, вид сверху; на фиг. 3 - разрез А-А на фиг. 2; на фиг. 4- расчетная схема определения веса лопасти. Устройство для определения веса лопасти 1 рабочего колеса гидротурбины содержит опоры 2,3 и 4 и основание 5, установленное на направлякадие б и среднюю опору 3. Жесткой тягой 7 основание связано с кронштейном 8, установленным на плите 9. На свободном конце тяги выполнена резьба, и она имеет гайки 10 и 11, при помощи которых происходит перемещение опори 3. Устройство имеет дополнительный груз.12. Способ реализуют следующим образом.. На плиту 9 устанавливают и за крепляют направляющие 6 и помещают на них основание 5. Закрепляют на плите 9 кронштейн.6. Опору 2, на которую опирается фланец лопасти 1,помещают на таком расстоянии а от средней опоры 3, что расчетный центр тяжести лопасти С. располагается нац нею (фиг. 4), ось поворота лопасти ОО после установки лопасти на опору 2 должна быть параллельна направляющим 6, зту линию наносят на плиту 9. Опора 4, на которую опирлется перо лопасти 1, устанавливают так, чтобы она находилась по другую ь сторону опоры 3, одновременно корректируют расстояние а так, чтобы центр тяжести лопасти .был несколько левее опоры 3, т.е. опирание происходит на 3 и 2, а между лог пастью 1 и опорой 4 есть зазор. Груз 12 известного весаQ перемацают вдоль оси поворота лопасти, пока фланец лопасти не оторвется от опоры 2.Замеряют расстояние 1, груза от торца лопасти 1, Далее опору 2 под- . нимают, освобождая среднюю опору 3, при этом лопасть опирается на опору 4. Посредством гаек 10 и 11 и тяги 7 опору 3 смещают в положение, показанное на фиг. 4 пунктиром, определяют велинину этого перемещения ij . Опору 2 опускают, освобождая отюру 4, перемещают груз 12 до нового равновесного положения системы и изменяют смещение L груза 12. Условие равновесия системы для первого равновесного положения имеет вид Q(l4-a-b) GCa + b-z, . а для второго QU34L,-o-b-L,V.QtLj+a + b-zU где Z - действительное расстояние от торца фланца лопасти, отсюда Z-j-73 -(oitb)L,-L,L2l, а вес лопасти L -L Испытание следует организовать так, чтобы величины а,в,Ц были неизменными, вес груза О также постоянная величина в испытании серии лопастей. В этом случае для определения веса лопасти достаточно замерить L и 1 определение же веса G проводят,по приведенным выше формулам. Таким образом, реализация прндлагаемого способа позволяет определить параметры лопастей достаточно просто не только в условиях ГЭС, но и в заводских условиях при отсутствии весов не.р.бхрдимой1 грузоподъемности , к тому же осуществление этого способа обеспечивает безопасность работ при замерах, поскольку все операции выполняются вне пределов площади лопасти в плане.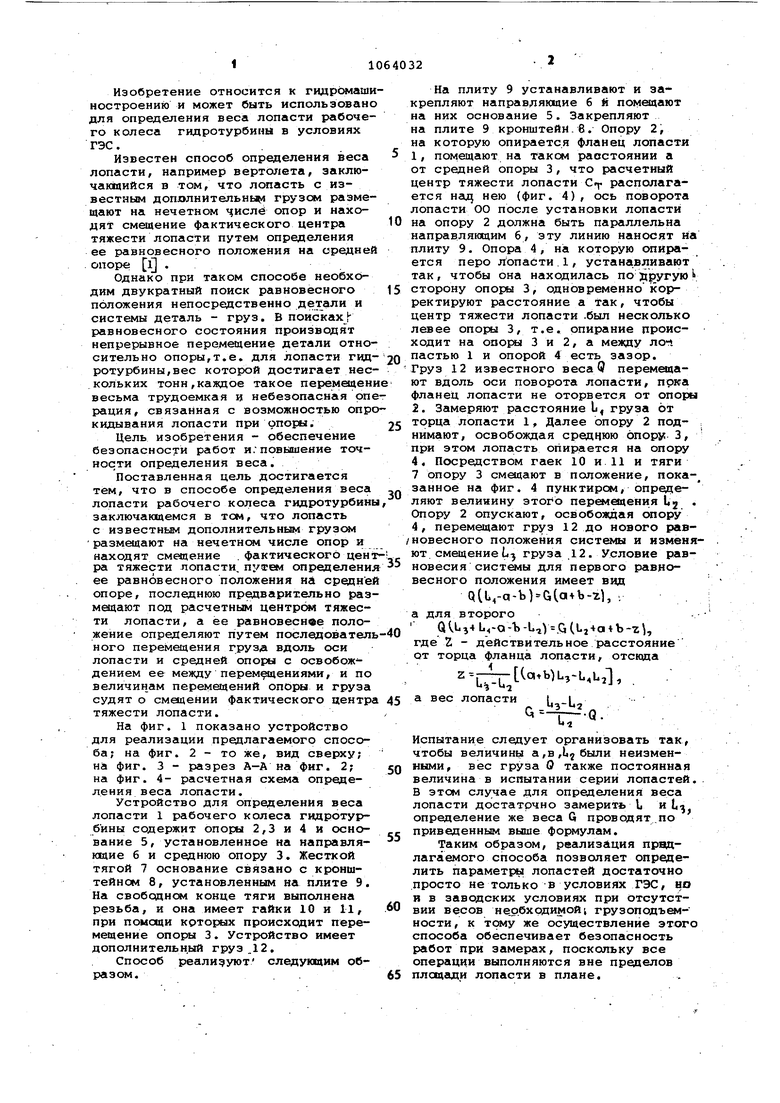
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСПЛОТИННАЯ ПРИЛИВНАЯ ГИДРОЭЛЕКТРОСТАНЦИЯ | 2023 |
|
RU2818414C1 |
| СИСТЕМА ИСПОЛЬЗОВАНИЯ ДИНАМИЧЕСКОЙ СИЛЫ ТЕКУЧЕЙ СРЕДЫ НА ПЛАВУЧЕЙ КОНСТРУКЦИИ И СУДНО, ПРИВОДИМОЕ В ДВИЖЕНИЕ ВЕТРОМ | 2012 |
|
RU2607713C2 |
| Способ восстановления работоспособности гидротурбины после длительного периода её эксплуатации | 2017 |
|
RU2689236C2 |
| СВОБОДНОПОТОЧНАЯ ОПЕРАТИВНАЯ ГИДРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 1992 |
|
RU2049929C1 |
| СПОСОБ БАЛАНСИРОВКИ РАБОЧЕГО КОЛЕСА ГИДРАВЛИЧЕСКОЙ ТУРБИНЫ | 2013 |
|
RU2530428C1 |
| РАБОЧЕЕ КОЛЕСО РАДИАЛЬНО-ОСЕВОЙ ГИДРОТУРБИНЫ | 1999 |
|
RU2157465C2 |
| БЕСПЛОТИННАЯ ПРИЛИВНАЯ ГЭС | 2021 |
|
RU2757047C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ РАБОТОСПОСОБНОСТИ ГИДРОАГРЕГАТА | 2005 |
|
RU2275525C1 |
| РУСЛОВЫЙ ГИДРОЭНЕРГОАГРЕГАТ | 2011 |
|
RU2469207C2 |
| СПОСОБ СТАТИЧЕСКОЙ БАЛАНСИРОВКИ РАБОЧЕГО КОЛЕСА ГИДРАВЛИЧЕСКОЙ ТУРБИНЫ | 2011 |
|
RU2456566C1 |
СПОСОБ ОПРЕДЕЛЕНИЯ BECAj ЛОПАСТИ РАБОЧЕГО КОЛЕСА ГЙДРОТУРБИ-i НЫ, заключающийся в тся4, что лопасть с известным дополнительным грузом раэмацают на нечетном числе опор и находят смещение фактического центра тяжести лопасти путем определения ее равновесного положения на средней опоре, отличающийся т&л, что , с целью обеспечен.ия безопасности работ и повышения точности. ся1ределения веса, среднюю опору предварительно размещают под расчетным центром тяжести .лопасти, a ее равно весное положение определяют путем последовательного перемещения груза вдоль оси лопасти и средней опоры с освобождение ее между перемещениями, и по величинам перемещений опоры и груза судят о смещении фактического центра тяжести лопасти.в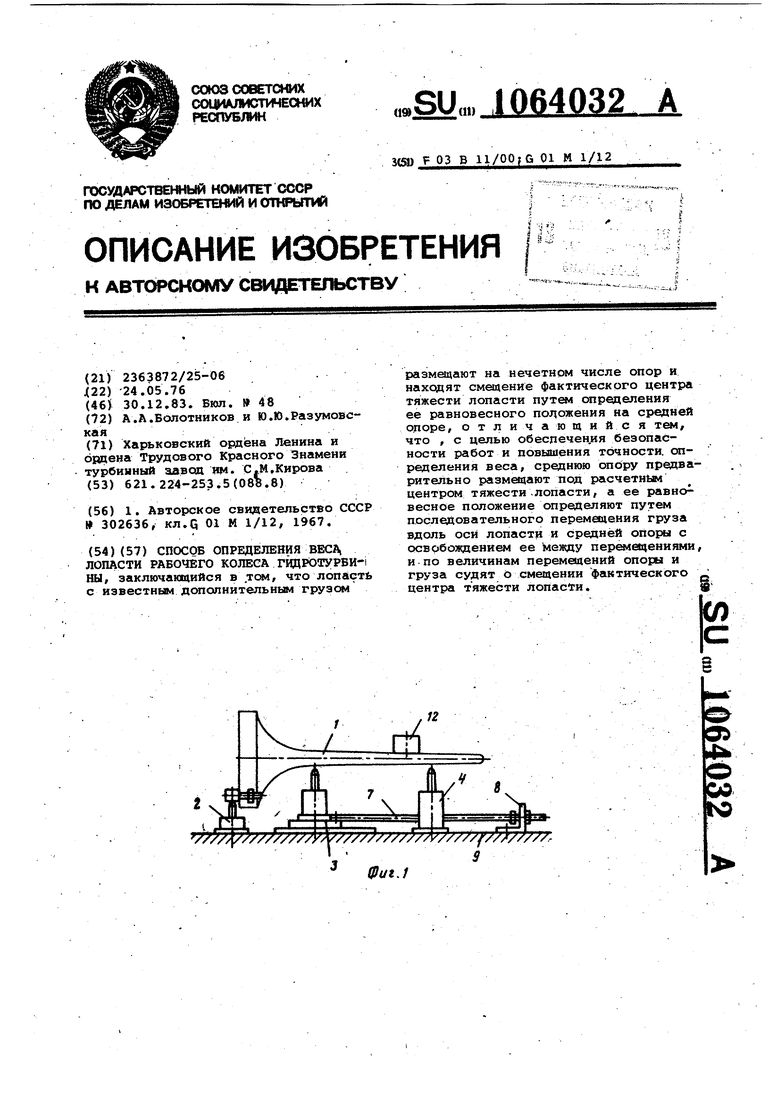
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СТАТИЧЕСКОГО МОМЕНТА ДЛИННОМЕРНЫХ ДЕТАЛЕЙ | 0 |
|
SU302636A1 |
