(54) СИСТЕМА УПРАВЛЕНИЯ ГРУЗОВЫА- И ОПЕРАЦИЯМИ НА ТАНКЕРЕ
M.IVI, a вых(хч - че)ез э,ле.ме1П M-Hf-l, второй вход которого связан с гзыходом ячсйк управления регистром высшего приоритета, с яивсрсьым входом элемента И-НЕ ячейки управления регистром параметра низшего приоритета, матрична-и ячейка фор.;ировання управляю цих кома 1Д содержит элементы И-НЕ, при этом выходы элемо1ггов И-МЕ, формирующих команды на пуск и остановку исполнительных механизмов ячейки, соединенной с регистром параметра высшего приоритета, соединены перекрестно с инверсными входами формирующих команды на остановку и пуск исполнительных механизмов ячеек, соединенных с регистром параметра низniero приоритета и тем, что блок коммутации управляюи1,их команд состоит из переключателя и логических элементов И, НЕ, «Задержка при этом выход переключателя соединен последовательно с одним из входов элемента И, выход которого соединен с элементом «Задержка, а другой вход - с выходом элемента НЕ, вход которого соединен е входом второго элемента И.
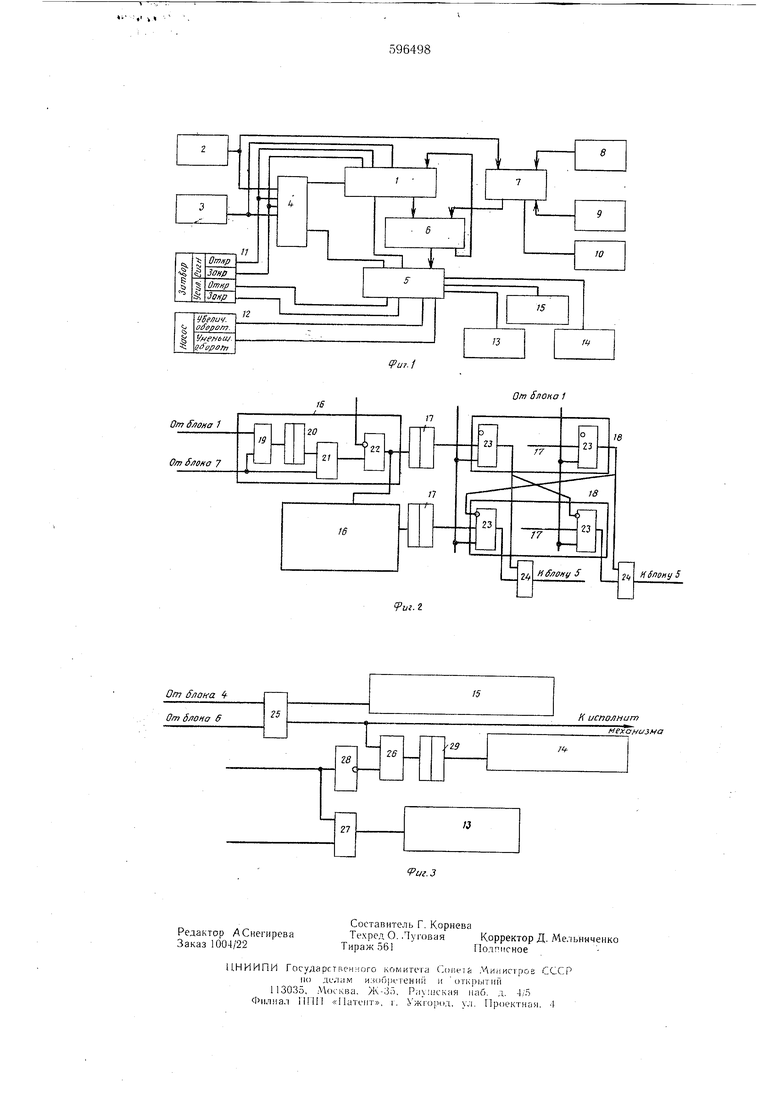
На фиг. 1 представлена функциональная схема системы управления; на фнг. 2 - функциональная схема блока опроса; на фиг. 3 - функциональная схема блока коммутации управляюпхих команд.
Система включает в себя формирователь
1состояния объектов, ко входам которого подключены датчики 2 уровня и датчики 3 режимов работы насосов через устройство 4 ввода и вывода информации, причем другой выход устройства 4 подключен к одному из входов блока 5 коммутации управляющих команд, к другим входам которого подключены соответствующие выходы формирователя 1 непосредствеино и через блок 6 опроса, один из выходов которого подключен к одному из входов формирователя 1. К другому входу блока 6 опроса нодключеп выход фо)мирователя 7 критических параметров, входы которого соединены с датчиками
2уровня, датчиками 8 посадки танкера и блоками 9 и 0 контроля соответствешю посадки и прочности судна. Выходы блока 5 нодключен к иенолнительпым механизмам 11 и 12 насосов и сигнальным табло 13-15.
На табло 13 высвечивается факт ликвидации выбега критических параметров, па табло 14 - информация о неисправности в линии управления, на табло 15 - рекомендация к дейсгВию-оператора.
Блок 6 опроса состоит из матричных ячеек 16, управления регистрами 17 параметров прочности, крена, дифферента, осадки, генеральной линии и матричных ячеек 18 формирования управляющих команд.
Связь матричных ячеек 16 форми К)ваиия управляющих команд е регистрами 17 параметров организована таким образо.м, что в первую очередь опрашиваются емкости, которые возможно подключить к процессу, а затем емкости, которые можно отключить от процесса.
Матричные ячейки 16 управления регистра.ми 17 параметров по приоритету содержат лотическую цепочку, состояи1ую из элемента 19 И, соединенного через элеме1гг 20 «Задержка с одним из входов элемента 21 ИЛИ. Выход
элемента 21 ИЛИ через элемент 22 И-НЕ, второй вход lUJToporo связан с выходсп; ячейки 16 управления региетром высн1его нриоритета, еоединеп с инвереным входо.м элеме1гга 22 И-НЕ ячейки 16 упрагиепия регистром параметра низшего приоритета своим регистром 17.
Матричные ячейки 18 формирования управляющих команд содержат элементы 23 И-НЕ.
Выходы элементов 23 И-НЕ формируюпгих команды через э,тсмепты 24 ИЛИ на пуск и остановку исполните П)Ных механизмов 1 1 и 12, соединены нерекрестно и с гпверсными входами ячеек 18, которые работают с регистром параметра пизшего приоритета.
Входы элементов 23 И-НЕ соединены также с выходами формирователя 1 состояния объектов .
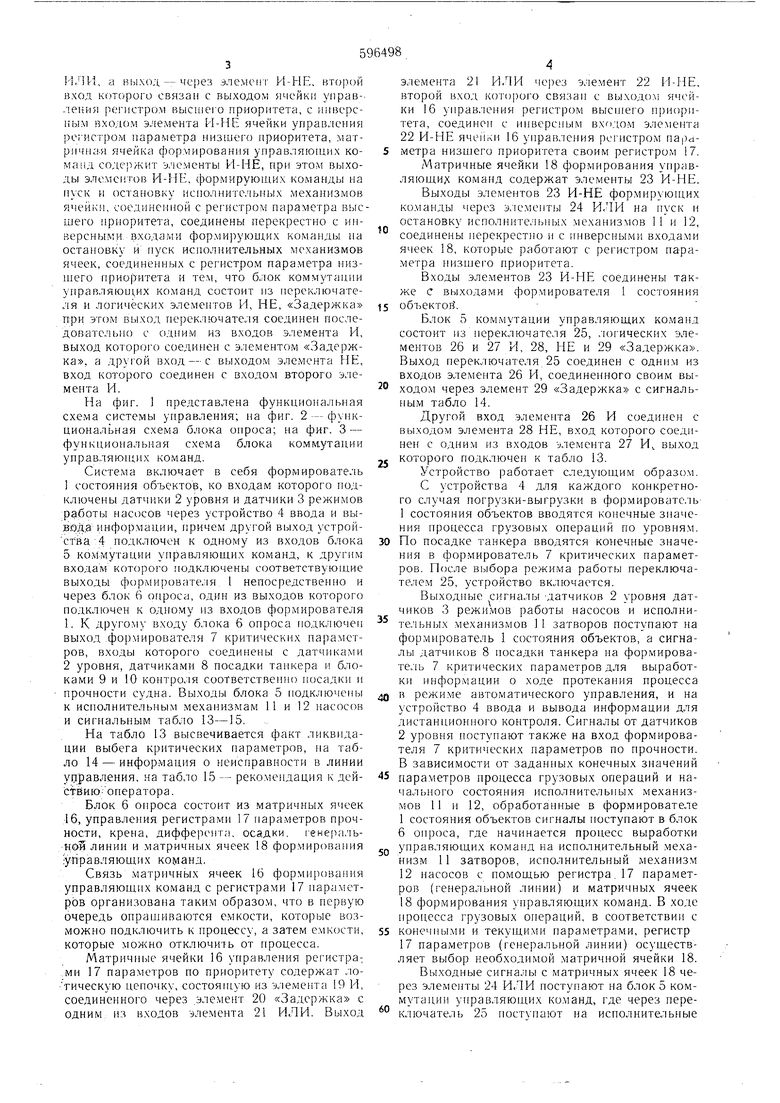
Блок 5 коммутации управляющих ко.манд состоит из переключателя 25, логических элементов 26 и 27 И, 28, НЕ и 29 «Задержка. Выход переключателя 25 соединен е одннм из входов элемента 26 И, соединенного своим выходом через элемент 29 «Задержка с сигнальпы.м табло 14.
Другой вход элемепта 26 И соединен с выходом элемента 28 НЕ, вход которого соединен с одним из входов элемента 27 И выход которого подключен к табло 13.
Устройство работает следующим образом.
С устройства 4 для каждого конкретного случая погрузки-выгрузки в формирователь
1состояния объектов вводятся конечные значения процесса грузовых операций по уровням. По посадке танкера вводятся конечные значения в фор.мирователь 7 критических параметров. После выбора режима работы переключателем 25, устройство включается.
Выходные сигналы -датчиков 2 уровня датчиков 3 режимов работы насосов и иснолните.льных механизмов 11 затворов поступают на формирователь 1 состояния объектов, а сигналы датчиков 8 иосадки танкера на формировате.ть 7 критических параметров для выработки информации о ходе протекания процесса в режи.ме автоматического управления, и на устройство 4 ввода и вывода информации для дистанционного контроля. Сигналы отдатчиков
2уровня поступают также на вход формирователя 7 критических параметров по прочности. В зависимости от заданных конечных значений параметров процесса грузовых операций и начального состояьгия исполпительных механизмов 11 и 12, обработанные в формирователе 1 еостояния объектов сигналы иоступают в блок 6 опроса, где начинается процесс выработки управляющих команд на исполнительный механизм 11 затворов, исполнительный механизм 12 насосов с помощью региетраЛ7 параметров (генеральной линии) и матричных ячеек 18 формирования управляющих команд. В ходе процесса грузовых операций, в соответствии с конечными и текуплими параметрами, регистр 17 параметров (генеральной линии) осуществляет выбор необходимой матричной ячейки 18.
Выходные сигналы с матричных ячеек 18 через эле.менты 24 ИЛИ поступают па блок 5 коммутации управляющих команд, где через переключатель 25 поступают на исполнительпые
механизмы 11 и 12 (в автоматическом режиме) или на табло 15 «Рекомендация к лейстиню при работе устройстьи в режиме «Советчика. В случае неисправности в линии управления, загорается табло 14 путем включения логической цепочки, состоящей из элементов 29 «Задержка, 26 И и 28 НЕ. Информация об открытии и закрытии затворов, пуске и остановке насосов высвечивается также на мнемосхеме устройства 4 ввода и вывода информации.
Если текущее значение какого-либо параметра, например прочности, превзойдет допустимые значения, информация с формирователя ..7 критических параметров поступает на ссотвбтствующее табло блока 10 контроля прочности и. контроля посадки 9, а также на входы матричных ячеек 16 управления регистрами 17 параметров по приоритету блока 6 опроса.
В матричной ячейке 16 управления регистром 17 параметра критический параметр поступает на вход элемента 21 ИЛИ и через элемент 22 И-НЕ, одновременно не запрещающий вход элемента 22 И-НЕ .матричной ячейки 16 параметра низшего приоритета и на включение своего регистра 17 пара.метра.
Регистр 17 параметра осуществляет подключение той матричной ячейки 18 формирования управляющих команд, на которую не поступают запрещающие сигналы от .матричной ячейки 16, подключенной к регистру параметра
17высшего ириоритета,и имеются разрешающие сигналы формирователя 1 состояния объектов «можно подключать или «.можно отключать. Сформированный в матричной ячейке
18управляющий сигнал идет одновременно на вход блока 5 ком.мутации управляющих команд через элементы 24 ИЛИ и перекрестно на запрещающие входы элементов 23 И-НЕ матричных ячеек .18 формирования управляющих команд, подключенных к регистрам 17 пара.мстров низщего приоритета через обратную сея.., на вход формирователя 1 состояния объектов, для формирования команды на включение табло 13 «Ликвидация выбега критического параметра через элемент 27 И. После ликвидации критического параметра сигнал с входа элемента 21 ИЛИ и входа элемента 27 И снимается табло 13 «Ликвидация выбега критического параметра гаснет, регистр 17 параметра устанавливается в исходное положение.
В случае выполнения рекомендации по ликвидации критического параметра путем отключения емкости от процесса грузовых операций, после выдержки времени на эле.менте 20 сигналы о наличии выбега критического параметра с формирователя 7 и об отключении емкости с блока 1 формирования состояния объектов через элемент 19 И поступают на- вход эле.мента 21 ИЛИ для выбора следующей рекомендации.
В случае выхода за допустимые пределы одновре.менно нескольких параметров, выбор peкo.vleндaций по параметрам низшего приоритета производится после выбора рекомендаций по параметру высшего приоритета.
Формула изобретения
1. Система управления грузовы.ми операциями на танкере, содержащая дагчики уровня и датчики режи.мов работы насосов, связанные через устройство ввода и вывода информации с формирователем состояния объектов, датчики носадки танкера, связанные с формирователем критических параметров, к одним из В1 |Водов которого по.аключены блоки контрсхтя посадки и прочности, сигнальные таб.ю и исполнительные механизмы насосов, отличающаяся тем, что, с целью повышения надежности и качества управления, она снабжена блоком коммутации управляющих команд и блоком опроса, состоящим из регистров параметров по приоритет).
.матричных ячеек управления и.ми и матричных ячеек формирования упр.авляющих коман;:., при этом входы блока опроса соединены с одним из выходов фор.мирователей состояния обьекта и критических параметров, а входы - соответственно с одни.м из выходов блока коммутации
управляющих команд, другие вхо.ты которого соединены соответственно с выходами устройства ввода и вывода информации п формирователя состояния объекта, а выходы - соответственно с исполиительными механиз.мами насосов, затворов и сигнальными табло. .
2.Система по п. 1, отличающаяся те.м, чтц матричные ячейки управления рег11страми параметров по приоритету содержат .югическую цепочку, состоящую из алсмента И, соединенного через э.чемент «Задержка с одним из входов
элемента ИЛИ, а выход- через эле.мент И-НЕ, второй вход которого связан с выходо.м ячейки управления регнстром вькмиего приоритета, с инверсным в.ходом элемент; И-Н1 ячейки управления регистром )а низшего приоритета; матричная ячейка формирования управляющих команд содержит элементы И-НЕ, при этом выходы элеме1 |ов И-НЕ, фор.мирующих команды на пуск и остановку ncno.iните,1Ы1ых механизмов ячейки, соединенно с регистром параметра высшего приоритета, соединены перекрестно с инверс1П11ми входами формирую иих команды па остановку и пуск исполнительных .механизмов ячеек, соединенных с регистро.м пара.метра приоритета.
3.Система по п.1, отличающаяся те.м, что 5 блок коммутации управляющих ко.манд состоит
из переключателя и логических э,1ементов И, НЕ, «Задержка, при этом выход переклк чателя соединен последовательно с одним из входов элемента И, выход которого соедннен с элементом «Задержка.а другой вход - с выходом элемента НЕ, вход которого соедннен с входом второго элемента И.
Источники информации, принятые во вни.мание прп экспертизе:
1.Авторское свидетельство СССР Л 373204, 55 кл. В 63 В 27,24, 1969.
2.Патент ФРГ До 1277058, кл. 65 а 27:24. 01.07.71.
fui.l On f/iOHO I- OmS/Joxa 7 От блока 1 Ибпону 5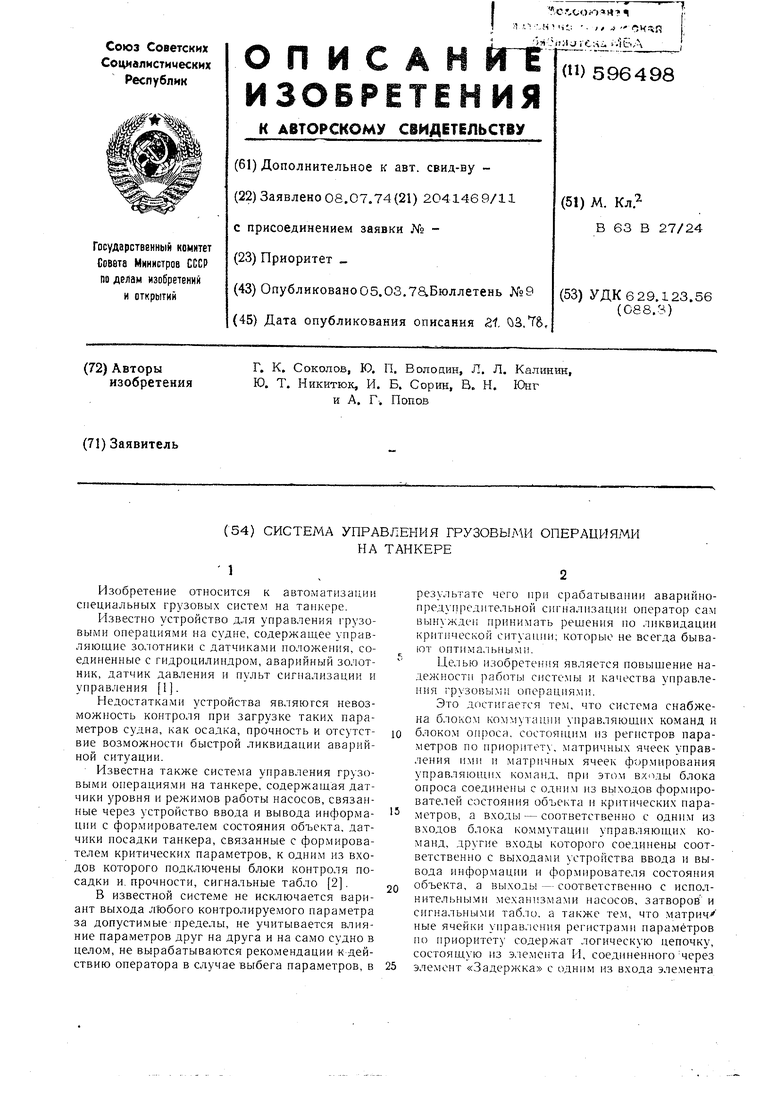

| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления грузовыми операциями на танкере | 1979 |
|
SU919933A2 |
| Система управления грузовыми операциями на танкере | 1978 |
|
SU753709A2 |
| Устройство для управления рабочимипОСТАМи | 1979 |
|
SU840927A2 |
| Коммутирующая сеть | 1986 |
|
SU1411766A1 |
| Устройство для приема и передачи телеинформации | 1977 |
|
SU696519A1 |
| Устройство для сигнализации с индикацией местоположения аварийного объекта | 1982 |
|
SU1121689A1 |
| Устройство для моделирования дискретных систем | 1985 |
|
SU1295411A1 |
| АНАЛИЗАТОР ПАРАМЕТРИЧЕСКИХ ОТКАЗОВ И СБОЕВ | 2004 |
|
RU2270470C2 |
| Телеметрическое устройство | 1979 |
|
SU858061A1 |
| УСТРОЙСТВО АКТИВНОЙ ЗАЩИТЫ И ОБЕСПЕЧЕНИЯ ТЕХНИЧЕСКОЙ ГОТОВНОСТИ ЭЛЕМЕНТОВ РАСПРЕДЕЛЕННОЙ ЛОКАЛЬНОЙ ВЫЧИСЛИТЕЛЬНОЙ СЕТИ В УСЛОВИЯХ ВНЕШНИХ ДЕСТРУКТИВНЫХ ВОЗДЕЙСТВИЙ | 2006 |
|
RU2316810C2 |