Изобретение относится к области измерительной техники, к измерительным устройствам, характеризующимся оптическими средствами измерений, и может быть использовано для определения формы волнового фронта, а также для определения дифференциального (относительного) изменения формы волнового фронта, отраженного от поверхности оптических элементов, в том числе асферических.
Применение дифференциальных интерференционных методов контроля при исследовании оптических элементов из нетрадиционных материалов (Be, Al, SiC, Si и др.) позволяет существенно ускорить процесс создания оптических систем. Нетрадиционные материалы для зеркал наряду с положительными качествами (малый удельный вес, большой модуль упругости) имеют и недостатки (анизотропия механических свойств, наличие внутренних напряжений), которые вызывают искажение формы оптических элементов при температурном воздействии.
Наряду с определением свойств материалов оптических элементов, работающих в широком диапазоне температур, большое значение имеет исследование сборок оптический элемент - оправа элемента - элементы крепления оправы. Это связано с разными коэффициентами термического расширения используемых материалов и механическими напряжениями в местах крепления деталей.
Традиционно влияние этих факторов на качество изображения, формируемого оптическими элементами, определяют при термоиспытаниях, измеряя термоаберрации. Под термоаберрациями понимают разность аберраций формы поверхности оптических элементов до и после температурного воздействия. Влияние механических напряжений при креплении оптических элементов также исследуют дифференциальными методами.
Проблемой дифференциальных (относительных) интерферометрических измерений является определение относительно малых аберраций при термо или механическом воздействии на фоне больших собственных аберраций волнового фронта, отраженного от асферической поверхности или высокоапертурной сферической поверхности, расположенной за иллюминатором (термоаберрации обычно измеряются в термовакуумной камере). При малых аберрациях отраженного волнового фронта (совместно с иллюминатором 2-3λ) дифференциальные измерения можно производить обычным амплитудным интерферометром, зарегистрировав и расшифровав интерферограммы начального и конечного состояния объекта, и найдя разность аберраций. Если начальные аберрации больше 2-3λ, возможно применение быстродействующего фазового интерферометра. Требование высокого быстродействия определяется большим виброфоном в термовакуумной камере, что не позволяет применять самые распространенные интерферометры последовательного фазового сдвига.
Все дальнейшие ссылки на диапазон работы интерферометра имеют приблизительную величину, поскольку разрешение интерференционной картины фотоприемником зависит от многох факторов, например, таких как: количество элементов фотоприемника, рабочая длины волны, форма эталонной волны в интерферометре, параметры асферизации измеряемых поверхностей (градиента поверхностей).
Быстродействующие фазовые интерферометры, например, MarSurf F1 3100 VB фирмы Marh, существуют, однако они дороги, имеют сложную конструкцию и составляют малую долю фазовых интерферометров, существующих на рынке. При этом даже они имеют ограниченный диапазон работы (до 20 λ).
Больший диапазон измерений и высокое быстродействие имеют муаровые интерферометры.
Наиболее близким по технической сущности к заявляемому является интерферометр, работающий по муаровому способу с компьютерно-генерированной интерферограммой в качестве эталонной картины сравнения [Пат. US №8482740, МПК G01B 11/02, публ. 09.07.2013 г.], выбранный нами в качестве прототипа.
Интерферометр типа Тваймана-Грина включает лазер, расширитель, светоделитель в виде оптического клина, размещенное в опорной ветви эталонное плоское зеркало, установленное на осевой линейный пьезопривод, соединенный через блок управления с ЭВМ, размещенный в рабочей ветви объектив, проекционную систему и матричный фотоприемник, соединенный с ЭВМ.
Интерферометр работает следующим образом.
Излучение лазера проходит расширитель, полученный параллельный пучок отражается от светоделительной поверхности светоделителя в виде оптического клина и направляется в опорную ветвь на эталонное плоское зеркало. Отраженный от эталонного плоского зеркала пучок в обратном ходе проходит светоделитель, проекционную систему и попадает на матричный фотоприемник. Прямо прошедший светоделитель пучок проходит эталонный объектив в рабочей ветви, отражается от объекта контроля (асферическая поверхность), проходит в обратном ходе эталонный объектив, отражается от светоделительной поверхности светоделителя, проходит проекционную систему и попадает на матричный фотоприемник. В плоскости фотоприемника образуется интерференционная картина, вид которой определяется разностью фаз излучения в объектной и опорной ветвях интерферометра.
Интерференционная картина в виде изображения вводится в ЭВМ, где из нее вычитается компьютерно-генерированная эталонная картина (CGR). Компьютерно-генерированная эталонная картина рассчитывается с учетом формы контролируемой поверхности и хода лучей в интерферометре. В результате вычитания образуется муаровая картина, которая характеризует отклонение формы поверхности от расчетной.
Для работы интерферометра в режиме с последовательным сдвигом фазы изменяют длину оптического хода в опорной ветви, смещая эталонное плоское зеркало при помощи линейного пьезопривода по команде от ЭВМ. Число и величина шагов привода зависят от алгоритма обработки (известны). Фаза в муаровой картине изменяется по такому же закону, что и изменение фазы в опорном плече интерферометра. Алгоритмы расчета фазы волнового фронта по набору сдвинутых по фазе картин известны.
Дифференциальные измерения таким интерферометром можно выполнять, последовательно контролируя начальное и конечное состояние объекта.
При использовании обычного высокоразрешающего матричного фотоприемника диапазон измерения аберраций не превышает 50 λ.
Техническим эффектом заявляемого устройства является расширение функциональных возможностей интерферометра путем обеспечения работы в нескольких режимах: амплитудном, фазовом и муаровом при увеличении диапазона измерения дифференциальных аберраций оптических поверхностей и увеличении точности работы в амплитудном режиме.
Такой технический результат достигнут нами, когда в интерферометре с функцией дифференциальных измерений, включающем лазер, расширитель лазерного пучка, светоделитель в виде оптического клина, размещенные по ходу луча в опорной ветви эталонное плоское зеркало с угловыми ортогональными подвижками и линейным осевым пьезоприводом, подключенным к ЭВМ через блок управления, размещенный в рабочей ветви эталонный объектив, проекционную систему и матричный фотоприемник, подключенный к ЭВМ, новым является то, что эталонное плоское зеркало с линейным пьезоприводом дополнительно размещено на угловом пьезоприводе, подключенном к ЭВМ через блок управления, а перед эталонным объективом в рабочей ветви установлены сменные компенсаторы сферической аберрации.
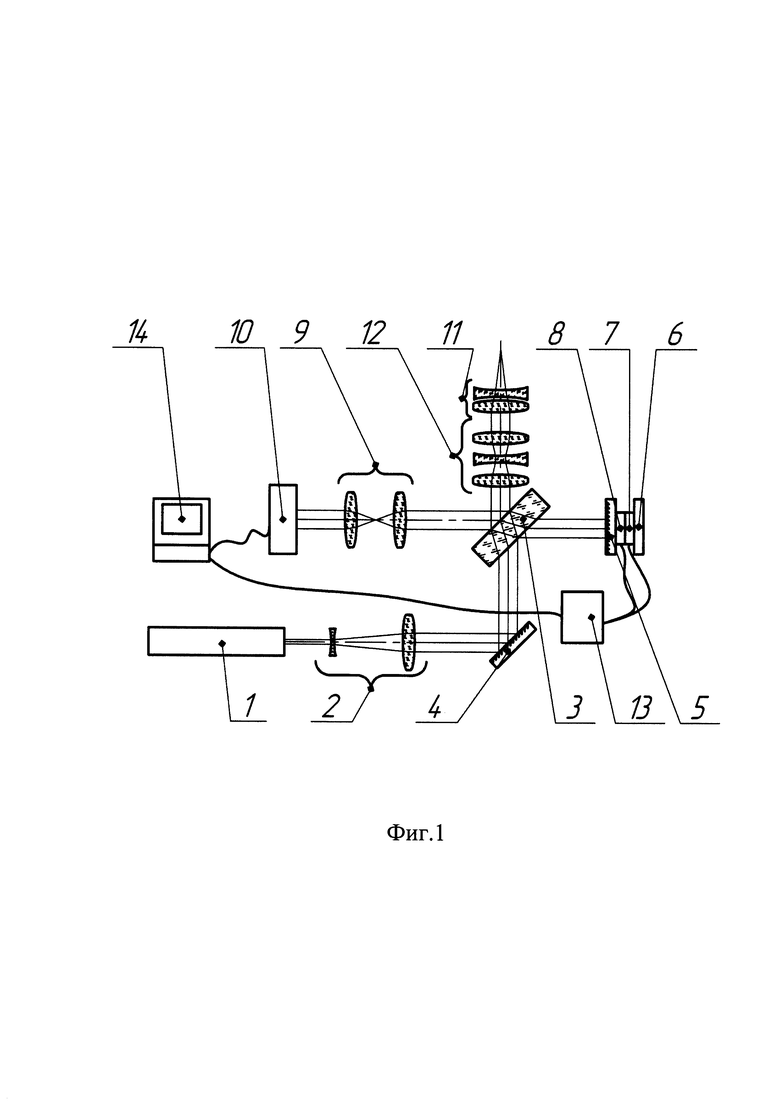
На фиг. 1 приведена функциональная схема интерферометра, где лазер 1, расширитель 2 лазерного излучения, светоделитель 3 в виде оптического клина, поворотное плоское зеркало 4, эталонное плоское зеркало 5, ортогональная двухкоординатная угловая подвижка 6, угловой пьезопривод 7, линейный пьезопривод 8, проекционная система 9, матричный фотоприемник 10, эталонный объектив 11, компенсатор 12 сферической аберрации, блок 13 управления пьезоприводом, ЭВМ 14.
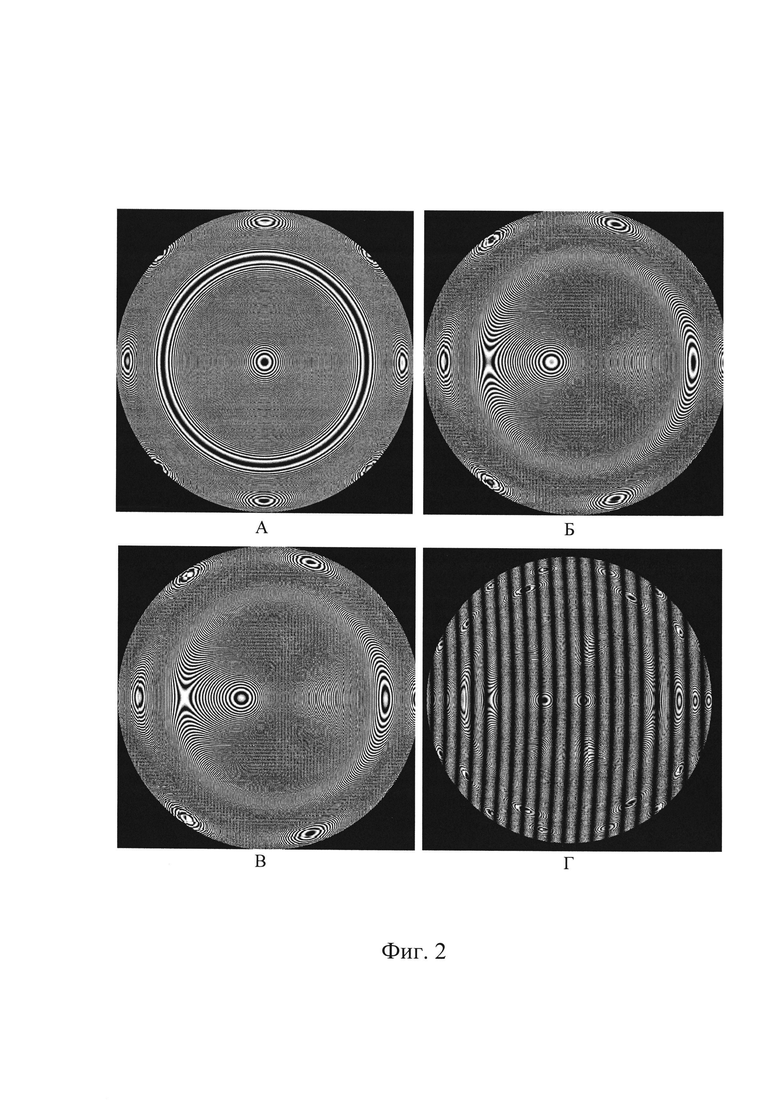
На фиг. 2 приведены картины настройки интерферометра в процессе контроля термоаберраций сферического зеркала за иллюминатором в термовакуумной камере, где А - интерферограмма сферического зеркала совместно с иллюминатором термовакуумной камеры (сферическая аберрация S=47λ), Б - интерферограмма начального состояния сферического зеркала совместно с иллюминатором при включенном угловом пьезоприводе (угол 27 угл. мин.), В - интерферограмма конечного состояния сферического зеркала совместно с иллюминатором при включенном угловом пьезоприводе (угол 30 угл. мин.) после изменения температуры, Г - муаровая картина между интерферограммами Б и В (наведенный астигматизм А=0,5 λ
Предлагаемый интерферометр работает следующим образом. При первоначальной настройке эталонное плоского зеркало 5 юстируют при помощи ортогональной подвижки 6 так, что «бесконечная полоса» интерферограммы соответствует центру поля эталонного объектива 11. Способы юстировки известны. Обычно к посадочному фланцу эталонного объектива 11, который с высокой степенью точности перпендикулярен оптической оси объектива, прижимают плоское автоколлимационное зеркало и двухкоординатной угловой подвижкой 6 добиваются на приемнике 10 «бесконечной полосы».
При работе в амплитудном режиме интерферометр настраивают на «бесконечную полосу» поперечным смещением интерферометра, а настройку на полосы осуществляют включением по команде от ЭВМ 14 через блок 13 управления пьезоприводом углового пьезопривода 7, осуществляющего угловое перемещение эталонного плоского зеркала на угол, соответствующий пятнадцати - двадцати интерференционным полосам. Таким образом, эталонный объектив 11 всегда работает центром поля, что исключает дополнительные ошибки при контроле, связанные с его полевыми аберрациями, в отличие от большинства интерферометров, настройка на полосы в которых осуществляется смещением интерферометра. Затем осуществляют регистрацию интерференционной картины матричным приемником 10 и считывание изображения в память ЭВМ 14 для последующей обработки (определения формы волнового фронта). При отключении углового пьезопривода 7 настройка интерферометра возвращается на «бесконечую полосу».
При настройке интерферометра на «бесконечую полосу» и использовании линейного пьезопривода 8, реализующего шаговое линейное осевое смещение эталонного зеркала 5, интерферометр работает в фазовом режиме с последовательным сдвигом фазы, что значительно повышает точность контроля. Принцип работы фазового интерферометра с последовательным механическим сдвигом фазы известен. При этом ЭВМ 14 по программе выдает последовательные сигналы на блок 13 управления пьезоприводом на осевое перемещение эталонного зеркала 5 и считывание информации с матричного ИК приемника 10 в память ЭВМ 14. Величина осевого шага эталонного зеркала 5 и количество шагов определяются используемым алгоритмом обработки. Алгоритмы работы интерферометра в фазовом режиме с последовательным сдвигом фазы известны.
Амплитудный режим работы интерферометра используют при контроле в условиях воздействия вибрационных помех, когда скорость считывания информации в фазовом режиме с последовательным сдвигом фазы недостаточна.
Фазовый режим используют при высокоточных измерениях формы волнового фронта оптических систем на виброизолированном столе.
При дифференциальном контроле аберраций функцию компьютерно-генерированной интерферограммы выполняет интерферограмма начального состояния поверхности, что упрощает процесс подготовки (не надо генерировать компьютерную интерферограмму) и процесс юстировки (не надо программно совмещать интерферограммы начального и конечного состояния поверхности).
В режиме муарового дифференциального интерферометра при контроле сферических поверхностей начальную картину настраивают на «бесконечную полосу» (при контроле асферики на кольцевую картину) поперечным смещением интерферометра и наклонами держателя контролируемой поверхности (см. фиг. 2), а настройку интерференционной картины на полосы осуществляют включением по команде от ЭВМ 14 через блок управления пьезоприводом 13 углового пьезопривода 7, осуществляющего угловое перемещение эталонного плоского зеркала на угол, соответствующий максимуму разрешаемых интерференционных полос для данного фотоприемника (более 200 полос) и запоминают в памяти ЭВМ 14. Конечную картину регистрируют аналогичным образом, только перемещение эталонного плоского зеркала выполняют на другой угол, отличающийся от первого таким образом, чтобы разность полос была 15 -20.
Затем из конечной интерференционной картины вычитают начальную картину. При вычитании образуется муарововая картина, характеризующая дифференциальные аберрации.
В отличие от известных устройств, угловой привод 7 работает в нескольких режимах: при амплитудном режиме работы интерферометра он осуществляет настройку на заданное количество полос интерферограммы, а в режиме дифференциального муарового интерферометра задает также несущую частоту интерференционной картины и частоту муаровой картины.
Если сферическая аберрация контролируемой асферической поверхности создает интерференционную картину, не разрешаемую фотоприемником, перед эталонным объективом устанавливают компенсатор сферической аберрации (сферическая аберрация третьего порядка составляет основную часть аберраций асферической поверхности).
Применение сменных компенсаторов сферической аберрации позволяет существенно расширить диапазон дифференциального контроля асферических поверхностей. Суммарная сферическая аберрация системы компенсатор - эталонный объектив - асферическое зеркало не должна превышать 50λ.
Пример конкретного исполнения.
По схеме, приведенной на фиг.1, разработан и изготовлен опытный образец интерферометра на длину волны λ=0,53 мкм. В качестве источника 1 излучения использован лазер типа LSM-S-111 производства АО «Лазер Экспорт», Москва. В качестве матричного фотоприемника использована матрица типа формата 4640×2812 элементов производства фирмы Ximea, ФРГ. Светоделитель 3 выполнен в виде оптического клина с углом при вершине 0,5 из стекла К8. На одну поверхность клина нанесено 50% многослойное светоделительное покрытие, на другую поверхность нанесено многослойное просветляющее покрытие. Все оптические элементы расширителя 2, проекционной системы 9, эталонного объектива 11, компенсатора 12 сферической аберрации выполнены из оптического стекла. Сменные компенсаторы 12 рассчитаны на компенсацию сферической аберрации 50λ, 100λ, 150λ.
Для сокращения габаритов в схему введено поворотное зеркало 4.
В линейном пьезоприводе используется линейный пьезоактюатор РРА10М, в угловом пьезоприводе используется линейный пьезоактюатор АРА900М производства фирмы Cedrat Technologies, Франция.
Преобразование линейного перемещения пьезоактюатора в угловое перемещение эталонного зеркала производится традиционной рычажной конструкцией с замыканием пружиной. Пьезоактюатор АРА900М имеет большой диапазон перемещений благодаря механическому усилителю, поэтому удалось выполнить угловую подвижку с диапазоном работы до 0,8 угл.град., что позволило осуществить несколько режимов работы интерферометра на одном пьезоприводе. Благодаря тому, что пьезоактюатор имеет малый гистерезис, настройка интерферометра на необходимое число полос и возврат к настройке на бесконечно широкую полосу производится без применения дополнительных датчиков угла. При этом эталонный объектив 11 работает всегда центром поля, что исключает дополнительную волновую ошибку.
Предполагается выпуск малой серии интерферометров для контроля термоаберраций зеркал.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОКОЛЛИМАЦИОННОЕ УСТРОЙСТВО ДЛЯ ЦЕНТРИРОВКИ ОПТИЧЕСКИХ ЭЛЕМЕНТОВ | 2019 |
|
RU2705177C1 |
| ИНТЕРФЕРОМЕТР ДЛЯ КОНТРОЛЯ АСФЕРИЧЕСКИХ ПОВЕРХНОСТЕЙ ВТОРОГО ПОРЯДКА | 2009 |
|
RU2396513C1 |
| Интерферометр для контроля формы оптических поверхностей | 1980 |
|
SU996857A1 |
| ФУРЬЕ-СПЕКТРОМЕТР | 1994 |
|
RU2100786C1 |
| Установка для измерения микрорельефа поверхности с использованием метода фазовых шагов | 2018 |
|
RU2677239C1 |
| Интерферометр для контроля формы поверхности выпуклых сферических деталей | 1988 |
|
SU1610248A1 |
| БЫСТРОДЕЙСТВУЮЩИЙ ИЗМЕРИТЕЛЬ ДЛИНЫ ВОЛНЫ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ ДЛЯ ВОЛОКОННО-ОПТИЧЕСКИХ СИСТЕМ ПЕРЕДАЧИ ИНФОРМАЦИИ | 2009 |
|
RU2425338C2 |
| ИНТЕРФЕРЕНЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОСИ АСФЕРИЧЕСКОЙ ПОВЕРХНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2658106C1 |
| Интерферометр фазового сдвига | 1989 |
|
SU1816313A3 |
| ДИФРАКЦИОННЫЙ ИНТЕРФЕРОМЕТР (ВАРИАНТЫ) | 2003 |
|
RU2240503C1 |
Изобретение относится к области измерительной техники. Интерферометр с функцией дифференциальных измерений содержит лазер, расширитель, светоделитель в виде оптического клина, размещенные по ходу луча в опорной ветви эталонное плоское зеркало с угловыми ортогональными подвижками и линейным осевым пьезоприводом, подключенным к ЭВМ через блок управления, размещенный в рабочей ветви эталонный объектив, проекционную систему и матричный фотоприемник, подключенный к ЭВМ, при этом эталонное плоское зеркало с линейным пьезоприводом дополнительно размещено на угловом пьезоприводе, подключенном к ЭВМ через блок управления, а перед эталонным объективом в рабочей ветви установлены сменные компенсаторы сферической аберрации. Технический результат - расширение функциональных возможностей интерферометра путем обеспечения работы в нескольких режимах: амплитудном, фазовом и муаровом при увеличении диапазона измерения дифференциальных аберраций оптических поверхностей и увеличении точности работы в амплитудном режиме. 2 ил.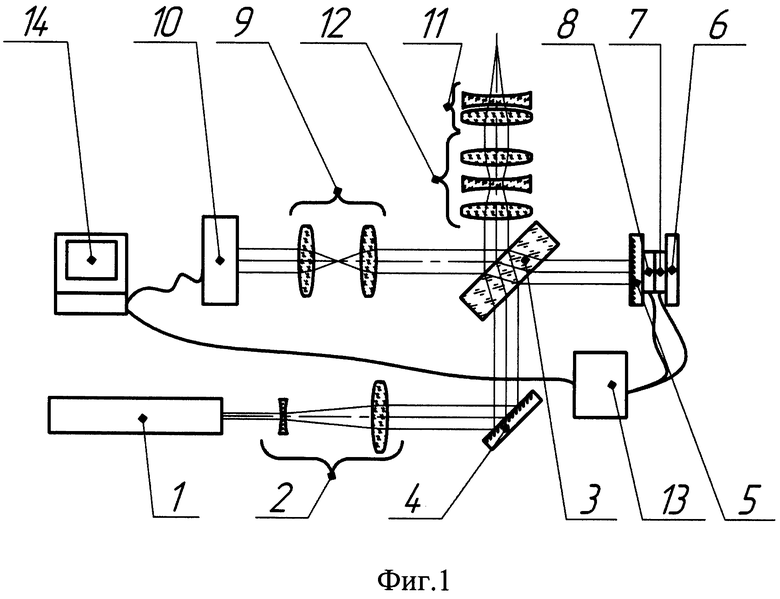
Интерферометр с функцией дифференциальных измерений, включающий лазер, расширитель, светоделитель в виде оптического клина, размещенные по ходу луча в опорной ветви эталонное плоское зеркало с угловыми ортогональными подвижками и линейным осевым пьезоприводом, подключенным к ЭВМ через блок управления, размещенный в рабочей ветви эталонный объектив, проекционную систему и матричный фотоприемник, подключенный к ЭВМ, отличающийся тем, что эталонное плоское зеркало с линейным пьезоприводом дополнительно размещено на угловом пьезоприводе, подключенном к ЭВМ через блок управления, а перед эталонным объективом в рабочей ветви установлены сменные компенсаторы сферической аберрации.
| СПОСОБ ПОЛУЧЕНИЯ 2-СТИРИЛ-4,6 ДИХЛОР-1,3,5-ТРНАЗИНЛ | 0 |
|
SU182727A1 |
| СПОСОБ ЦЕНТРОБЕЖНОЙ ЗАЛИВКИ СЛОЯ АЛЮМИНИЯ НА ПОВЕРХНОСТЬ СТАЛЬНОЙ ТРУБЫ | 1946 |
|
SU69982A1 |
| US 8482740 B1, 09.07.2013 | |||
| ЦИФРОВОЙ ПРИВОД | 0 |
|
SU321806A1 |

