2, .Способ определения индуктивных сопротивлений обмотки якоря синхронной машины путем измерений параметров обмотки в генераторном режиме при вращении ротора с индуктором и последующих вычислений, о т л и ч аю щ и и с я тем, что, с целью повышения точности определения сопротивлений, каждую фазу обмотки подключают к одинаковым тарированным активным сопротивлениям, при трех разных .значениях частоты вращения ротора измеряют напряжения фаз обмотки якоря , после чего определяют путём вычислений индуктивные сопротивления из системы уравнений
К; - Кц. А. при 4 1,2,3
( по выражениям, ,,j. ,-. Г/к,.
Г ,., ..хе.. -..J, L V., ...eJJ
i ЧкчГГТГГ)
Lj. KpV-ц -, Xc. 2ft{ Ц-, Xj 2ir{ e,
коэффициенты которых определяют по уравнению
К(Ае|48Е се,1 + 2Х(Ае, + 8Е,сеО А4в4С 0,
где А К4 (nj-n) ; В К {П4-п|) ; С )К; пЬн +КнГ
Кр; f/n - коэффициент редукции f - частота напряжения
фазы;
п - частота вращения ротора;
R). - активное сопротивлет ние нагрузки в цепи фазы обмотки якоря; R(p - активное сопротивление фазы обмотки якоря.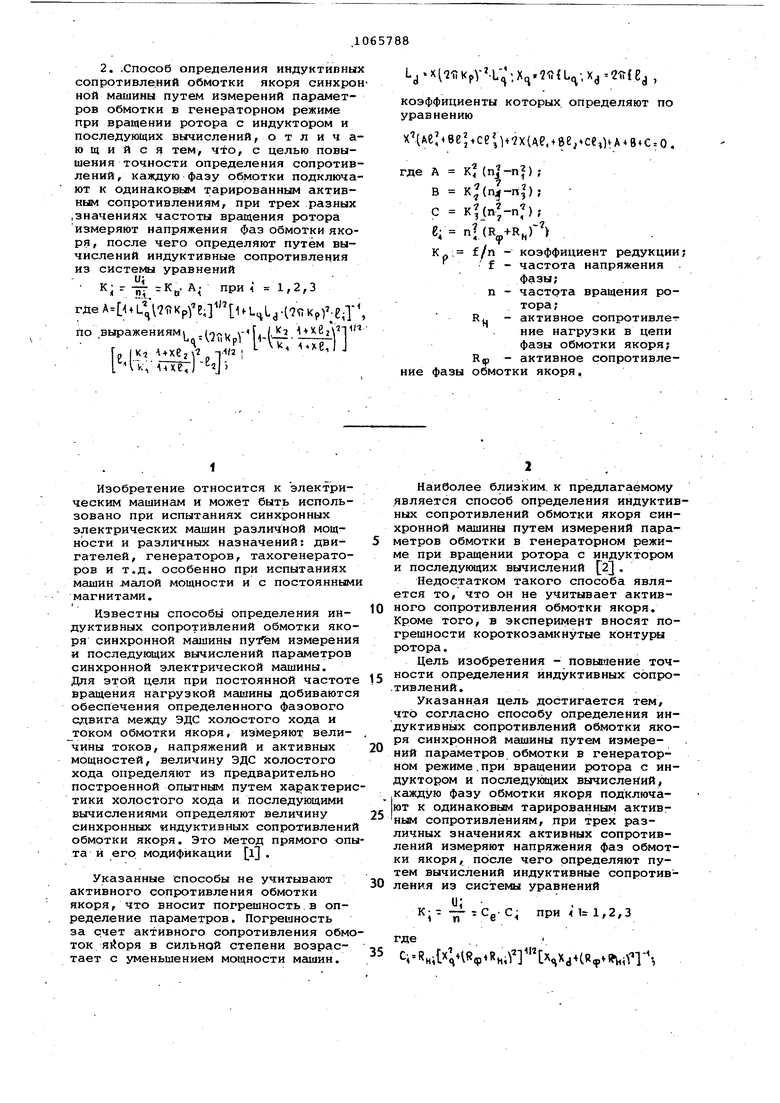

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения синхронных индуктивных сопротивлений явнополюсного синхронного генератора | 1982 |
|
SU1064248A1 |
| СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА | 1991 |
|
RU2016473C1 |
| УСТРОЙСТВО, ИМИТИРУЮЩЕЕ ЭЛЕКТРОННЫМ СПОСОБОМ БЕСКОНТАКТНЫЙ СИНХРОННЫЙ ГЕНЕРАТОР, И СТЕНД ПРОВЕРКИ И НАСТРОЙКИ БЛОКОВ РЕГУЛИРОВАНИЯ, ЗАЩИТЫ И УПРАВЛЕНИЯ | 2018 |
|
RU2710956C1 |
| Вентильный электродвигатель | 1988 |
|
SU1573508A1 |
| СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА | 1991 |
|
RU2016474C1 |
| Реверсивный вентильный электродвигатель | 1985 |
|
SU1297186A1 |
| СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА | 1991 |
|
RU2016472C1 |
| Способ управления вентильным электродвигателем постоянного тока | 1989 |
|
SU1757039A1 |
| Вентильный электродвигатель | 1977 |
|
SU699617A1 |
| СИНХРОННЫЙ БЕСКОНТАКТНЫЙ ГЕНЕРАТОР | 2011 |
|
RU2472274C1 |
1. Способ определения индуктив ных сопротивлений обмотки якоря синхронной машины путем измереии1Г параметров обмотки в генераторном режиме при вращении ротора с индукторЪм и последующих вычислений, о т личающийся тем, что, с целью повышения точности определения сопротивлений, каждую фазу обмотки якоря подключают к одинаковым тарированным активным сопротивлениям. при трех разных значениях активных сопротивлений измеряют напряжения |фаз обмотки якоря, после чего опре деляют путем вычислений индуктивные сопротивления из системы уравнений Щ. при 1 1,2,3 :гдеА ,{ НКф4К„,(я.р,.по выражениям .,,(X.l y-xlRt,(X.R,) HR.RH U RZ K-JMH-IC R. коэффициенты которых определяют по уравнению АХ +2ХВ+С 0, дeA..,, R,.(,jRj4 eH7f;R5 lR4+RHi ;KrxjR,R iRj-R,V,m..R,).,, k,(-Rj), - активное сопротивление нагрузки в цепи фазы обмотки якоря; АЛ - активное сопротивление фа. зы обмотки якоря; п - частота вргицения ротора. 0-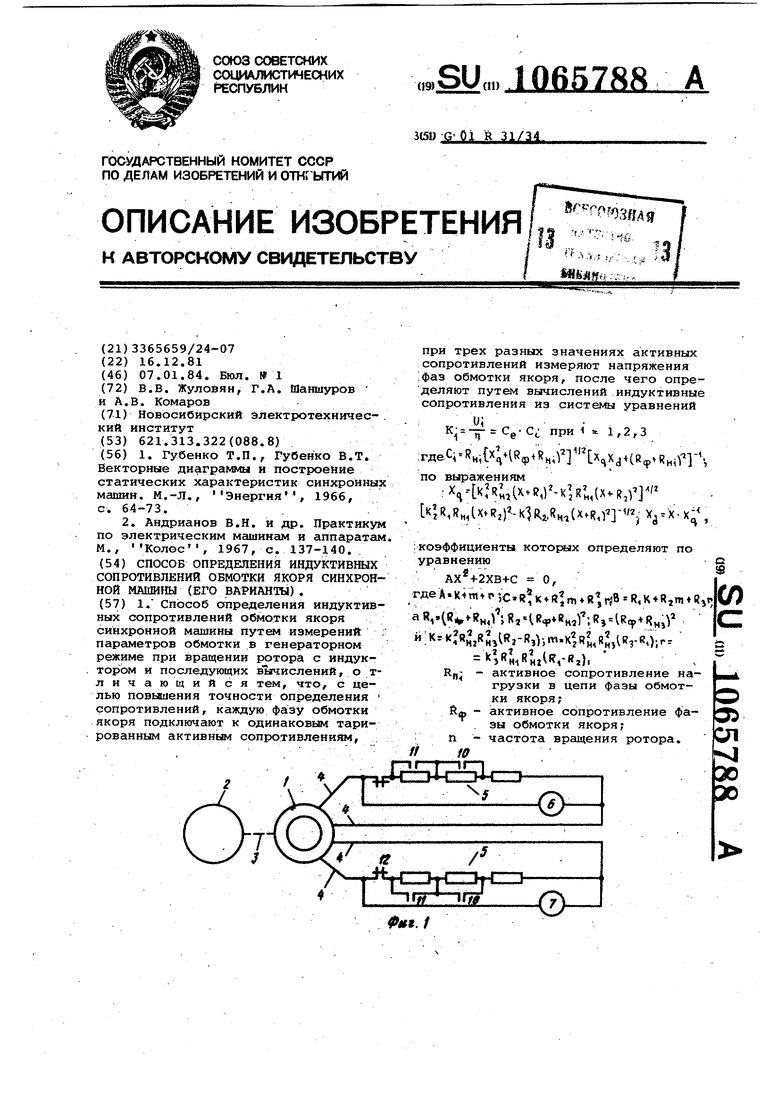
1
Изобретение относится к электрическим машинам и может быть использовано при испытаниях синхронных электрических машин различной мощности и различных назначений: двигателей, генераторов, тахогенераторов и т.д. особенно при испытаниях машин малой мощности и с постоянными магнитами.
Известны способы определения индуктивных сопротивлений обмотки якоря синхронной машины измерения и последующих вычислений параметров синхронной электрической машины. Для этой цели при постоянной частоте вреицения нагрузкой мгиаины добиваются обеспечения определенного фазового сдвиги между ЭДС холостого хода и током обмотки якоря, измеряют величины токов, напряжений и активных мощностей, величину ЭДС холостого хода определяют из предварительно построенной опытным путем характеристики холостого хода и последующими вычислениями определяют величину синхронных индуктивных сопротивлений обмотки якоря. Это метод прямого опыта и его модификации ij .
Указанные способы не учитывают активного сопротивления обмотки якоря, что вносит погрешность в определение параметров. Погрешность за счет активного сопротивления обмоток яйоря в сильной степени возрастает с уменьшением мощности машин.
Наиболее близким к предлагаемому является способ определения индуктивных сопротивлений обмотки якоря синхронной машины путем измерений параметров обмотки в генераторном режиме при вращении ротора с индуктором и последующих вычислений 2.
Недостатком такого способа является то, что он не учитывает активного сопротивления обмотки якоря. Кроме того, в эксперимент вносят погрешности короткозамкнутые контуры ротора.
Цель изобретения - повышение точности определения индуктивных сопротивлений.
Указанная цель достигается тем, что согласно способу определения индуктивных сопротивлений обмотки якоря синхронной машины путем измерений параметров обмотки в генераторном режиме.при вращении ротора с индуктором и последующих вычислений, каждую фазу обмотки якоря подключают к одинаковым тарированным активным сопротивлениям, при трех различных значениях активных сопротивлений измеряют напряжения фаз обмотки якоря, после чего определяют путем вычислений индуктивные сопротивления из системы уравнений
п
K-.- rCgC при Ы,2,3
где
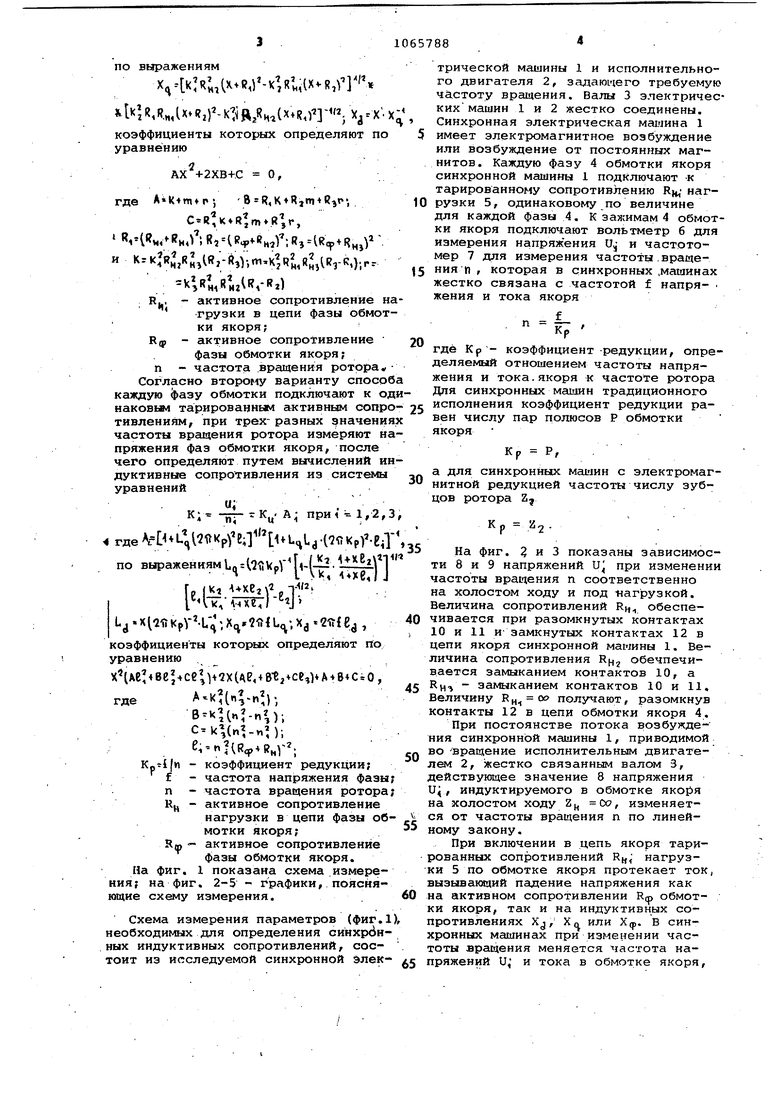
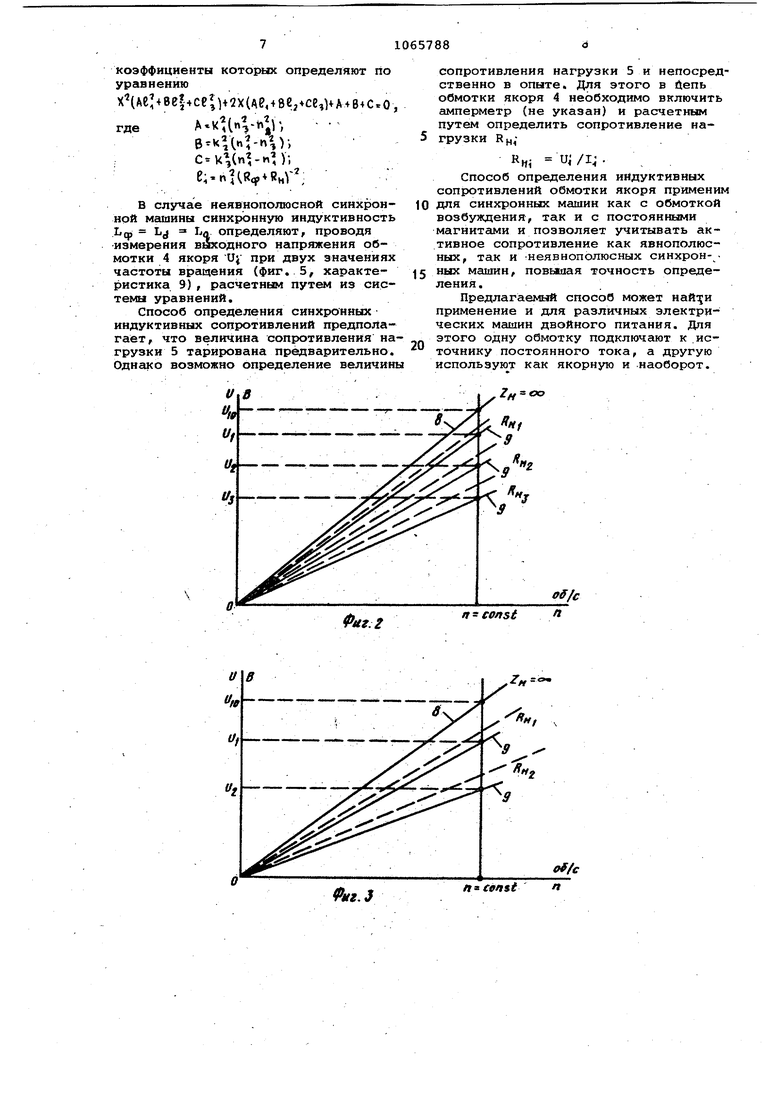
CrRHitV tVdHRT(fi.T, по выражениям х к:к„Дк.к,)-к,к1,(х.к,% ,R.„Дx RJf-k ft,Rц(x.R,). . Х коэффициенты которых определяют по уравнению АХ +2ХВ+С 0, где А«К+|ц п-, 8 R, KtRjiTi + . ,r. В Ч ч КиУ;К Ч();R -lRcp+RHj) и К кХгнз « ;«зУ, -Кг«м,йю гЧ; i HiR., - активное сопротивление н грузки в цепи фазы обмот ки якоря; Кф - активное сопротивление фазы обмотки якоря; п - частота вращения ротора Согласно второму варианту способ каждую азу обмотки подключают к од наковым тарированным активным сопро тивлениям, при трех- разных начени частоты вращения ротора измеряют на пряжения фаз обмотки якоря, после чего определяют путем вычислений ин дуктивные сопротивления из системы уравнений К; -пТ-гКцА ,2, I где i: + LV P «il t 4ld-l «« P)-EiT по выражениям ( Г jK, ,-тгггЧ Lj«X(7fiKpV-U ,,Xj ««irfgj , коэффициенты которых определяют по уравнению x iAe4Be5- cc l+5x(.AeHB 2 ce,), где )-, ); ,); ; , е. Kp-i(« - коэффициент редукции; f - частота напряжения фазы п - частота вращения ротора Кц - активное сопротивление нагрузки в цепи фазы об мотки якоря; Rm - активное сопротивление фазы обмотки якоря. На фиг. 1 показана схема измерения; на фиг. 2-5 - графики, поясняющие схему измерения.. Схема измерения параметров (фиг.1 необходимых для определения синхрбнных индуктивных сопротивлений, состоит из исследуемой синхронной Электрической машины 1 и исполнительного двигателя 2, задаю1чего требуемую частоту вращения. Валы 3 электрических машин 1 и 2 жестко соединены. Синхронная электрическая магиина 1 имеет электромагнитное возбуждение или возбуждение от постоянных магнитов. Каждую фазу 4 обмотки якоря синхронной машины 1 подключают -к тарированному сопротивлению Кц, нагрузки 5, одинаковому по величине для каждой фазы 4. К зажимам 4 обмотки якоря подключают вольтметр б для измерения напряжения Uj и частотомер 7 для измерения частоты вращения п , которая в синхронных .машинах жестко связана с частотой f напря- . жения и тока якоря где Кр - коэффициент редукции, определяемый отношением частоты напряжения и тока.якоря к частоте ротора Для синхронных машин традиционного исполнения коэффициент редукции равен числу пар полюсов Р обмотки якоря Кр Р, а для синхронных MauiHH с электромагнитной редукцией частоты числу зубцов ротора Z, К Р 55 2 На фиг. и 3 показаны зависимости 8 и 9 напряжений U при изменении частоты вращения п соответственно на холостом ходу и под -нагрузкой. Величина сопротивлений R обеспечивается при разомкнутых контактах 10 и 11 и замкнутых контактах 12 в цепи якоря синхронной машины 1. Величина сопротивления R обечпечивается замыканием контактов 10, а RH, - замыканием контактов 10 и 11. Величину RHI O получают, разомкнув контакты 12 в цепи обмотки якоря 4. При постоянстве потока возбуждения синхронной мгиаины 1, приводимой во вращение исполнительным двигателем 2, жестко связанным валом 3, действующее значение 8 напряжения и, индуктируемого в обмотке яко)Я на холостом ходу Z со, изменяется от частоты вращения п по линейному закону. При включении в цепь якоря тарированных сопротивлений Нц нагрузки 5 по обмотке якоря протекает ток, вызывающий падение напряжения как на активном сопротивлении Rф обмотки якоря, так и на индуктивных сопротивлениях X j, Хп или Хф. В синхронных машинах при изменении частоты овргццения меняется частота напряжений и; и тока в обмотке якоря. что приводит к изменению индуктивных сопротивлений Xj, Хл или Хф. :)то определяет нелинейный характер (9) изменения UJ (фиг. 2 и 3). От величины сопротивления нагрузки RKJ зависит и наклон характеристик 9 и степень отклонения от их линейного закона К; Н Се-С .при i 1,2,3. -п Се N при i 1,2,3. Коэффициенты нелинейности С; и Ы, определяются из уравнений электрического равновесия, в которое и входят параметры обмотки якоря Х, . Х( или Х(- Х С; йн;К ф н 1 ЧХ НйфГйыП--, N, RHi V q H4fr Если синхронная машина 1 явнополюсная, то при трех значениях сопро тивления нагрузки якоря .замараю соответственно три значения (фиг.2) напряжения Ui с помощью вольтметра б, а частоту вращения фиксируют при этом, например, с помощью частотомера 7. Путем последующего расчета по соотношениям, полученным из урав нения электрического равновесия, рассчитывают синхронные индуктивные сопротивления обмотки якоря из системы уравнений V. - 21 Cg- с, при i 1,2 п по выражениям . (х.к,)-ки;дх к,У 1к1к,.р,)Я-к,.к,1П ; а коэффициенты которых определяют по уравнению АХ+2ХВ+С 0, A-kim+r; + + R, C + Rjm+R r, a Rv(. R-24i cp Rhcif, . и ,R,iRj-R3V) 4RLRH3V r«0; ) Расчетную часть и экспериментальную часть можно упростить. Для этого измерения U, , т.е. пер вое измерение, выполняют при разомкнутом конта кте 12 на холостом ходу (Кц со ). Параметры синхронной ма шины расчитывают по выражениям S l HZylLxHR tR f Хп ( Гг, ,г„ . (,fR;, коэффициенты которых определяются уравнением ,Kl-RH,(R, - к1 кэ-я1-кн к о- . в случае неявнополюсной машины синхронное индуктивное сопротивление фазы обмотки якоря Х„,сХ Хп определяют, проведя измерения выходного напряжения обмотки якоря U при двух различных значения нагрузки R, расчетным путем из системы уравнений К Cg-N,- , i 1,2,3, где ( г ,, ,2 7/ выражениюх...,( . . В зтом - случае расчет и эксперимент могут быть упрощены, если первое измерение фазного напряжения выполняют на холостом ходу при Rj oo , а параметры расчитывают по выражению V Напряжение фазы изменяется под нагрузкой от частоты вращения п. не по линейному закону (фиг, 4 и 5) характеристика 9 и «ипри i 1,2,3 « KtvVB, Коэффициент нелинейности А и Вопределяется из уравнения электрического равновесия, в которое входят . параметры обмотки якоря Lg, L или L A--LlM iMifff, , ,. / -SKp-kaa-i-i r4bd( ) в.-Гик Если синхронная машина 1 явнополюсная при трех значениях частоты вращения п; , обеспечиваемых исполнительным двигателем 2 по второму варианту способа замеряют соответственно три значения (фиг, 2) напряжения и с помощью вольтметра 6, а частоту вращения фиксируют при этом, например, с помощью частотомера 7. Путем последующего расчета по соотношениям, полученным из уравнения электрического равновесия, расчитывают синхронные индуктивности обмотки якоря из системы уравнений К Si- Kj. при i 1,2,3. по выражениям ,Ш1тГ- гП ргч-,
коэффициенты которых определяют по уравнению
x(Ae Bef+ce,)+2xue,+Be,+ce,UA4B4CrO,
где А«кДпз-«л1, BrkVCnl-l)) ). е;.«Кй внГ;
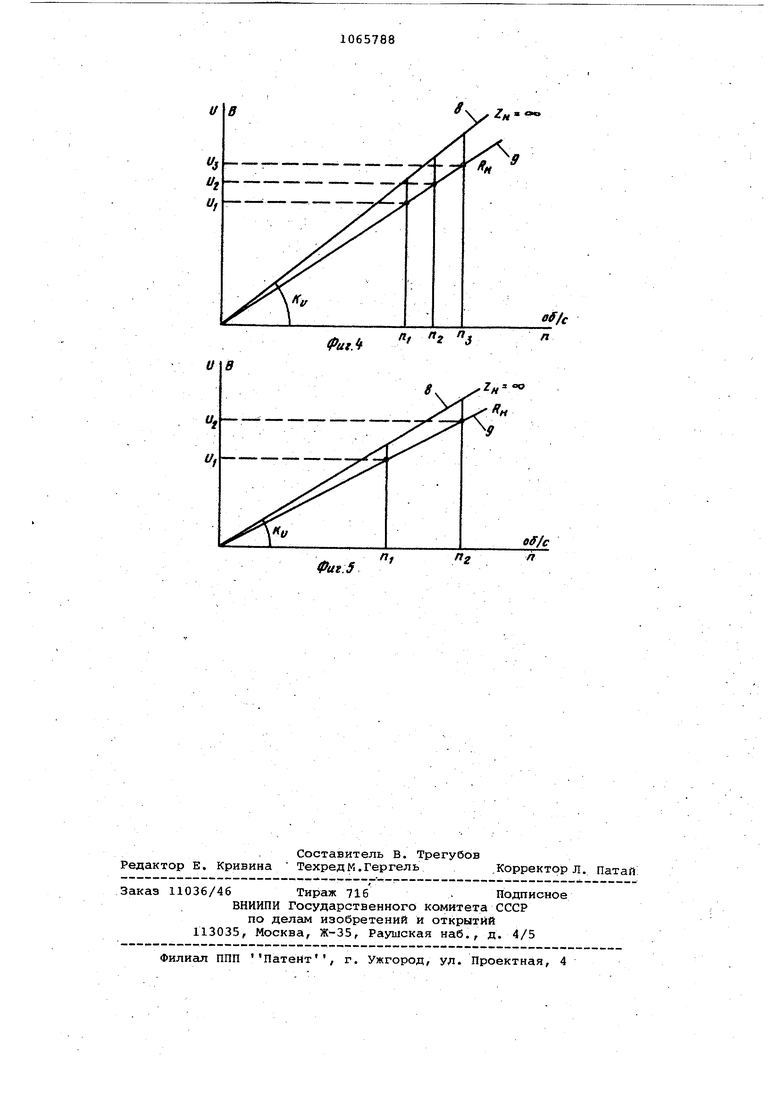
в случае неявнополюсной синхронной машины синхронную индуктивность LCD LJ La определяют, проводя измерения выходного напряжения обмотки 4 якоря U} при двух значениях частоты вращения (фиг. 5, характеристика 9), расчетным путем из системы уравнений.
Способ определения синхронных индуктивных сопротивлений предполагает, что величина сопротивления нагрузки 5 тарирована предварительно. Однс1ко возможно определение величин
Фаг. 2
сопротивления нагрузки 5 и непосредственно в опыте. Для этого в йепь обмотки якоря 4 необходимо включить амперметр (не указан) и расчетным путем определить сопротивление на5 грузки RH,
Rffi Ui/l;. Способ определения индуктивных сопротивлений обмотки якоря применим 0 для синхронных машин как с обмоткой возбуждения, так и с постоянными магнитами и позволяет учитывать активное сопротивление как явнополюсных, так и неявнополюсных синхрон-ных машин, повышая точность опреде5ления.
Предлагаемый способ может най:5и применение и для различных электрических машин двойного питания. Для этого одну обмотку подключают к ис0точнику постоянного тока, а другую используют как якорную и наоборот.
Z/y «
oS/c
и г const Л
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Губенко Т.П., Губенко В.Т, Векторные диаграммы и построение статических характеристик синхронны машин | |||
| М.-Л., Энергия , 1966, с | |||
| Нефтяной конвертер | 1922 |
|
SU64A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Андрианов В.Н | |||
| и др | |||
| Практику по электрическим машинам и аппарата М., Колос, 1967, с | |||
| Способ приготовления строительного изолирующего материала | 1923 |
|
SU137A1 |
