Изобретение относится к электротехнике.
Целью изобретения является повышение КПД.
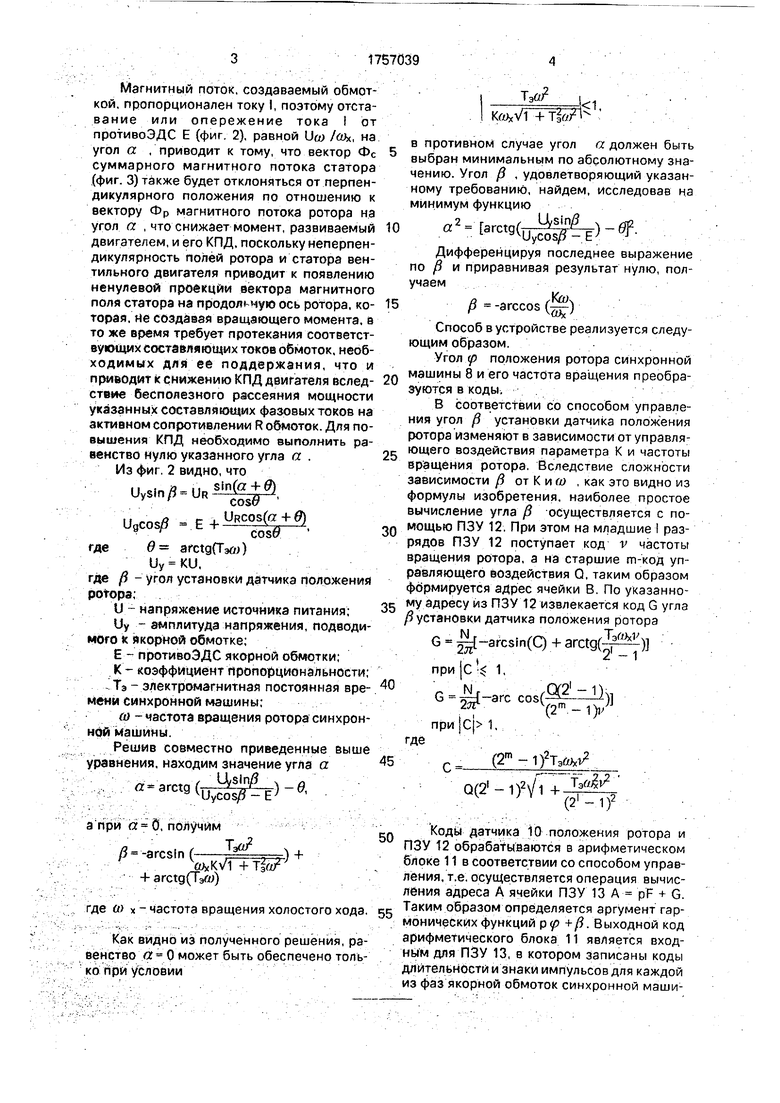
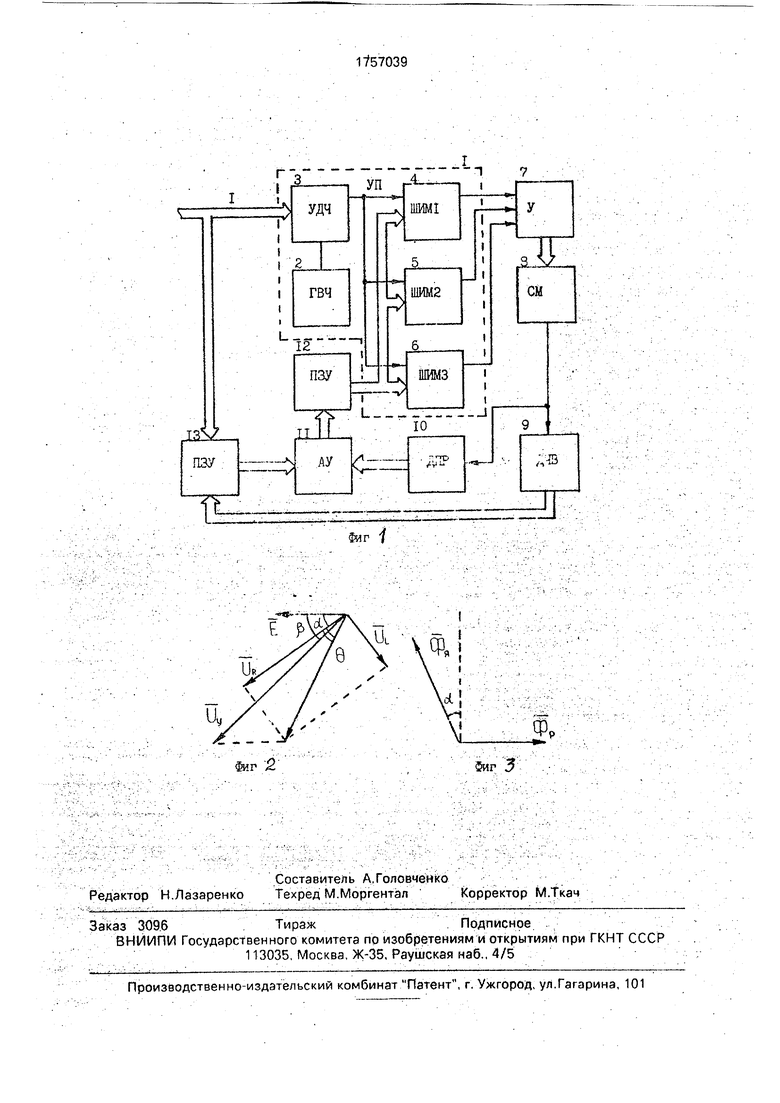
На фиг. 1 приведена функциональная схема устройства, реализующего способ; на фиг. 2,3- векторные диаграммы, поясняющие сущность способа.
Устройство, реализующее способ управления вентильным двигателем постоянного тока, содержит блок 1 умножения, включающий генератор 2 высокой частоты и управляемый делитель 3 частоты, входом соединенный с выходом генератора высокой частоты, а выходом - с первыми входами широтно-импульсных модуляторов (ШИМ) 4-6. Кодовый вход управляемого делителя 3 частоты служит первым входом блока 1 умножения, вторые входы ШИМ 4-6 - вторым
входом блока 1 умножения, а выходы ШИМ - выходами блока 1 умножения, подключенные к входам усилителя 7, выходы которого соединены с разными выводами якорной обмотки синхронной машины 8 вентильного двигателя. На валу синхронной машины установлены датчик 9 частоты вращения и датчик 10 положения ротора, выход которого подключен к первому входу арифметического блока 11, второй вход которого соединен с выходом постоянного запоминающего устройства (ПЗУ) 12, а выход - с входом второго постоянного запоминающего устройства 13, выходом подключенного ко второму входу блока 1 умножения, к первому входу которого подключен второй вход ПЗУ 12.
Сущность способа управления вентильным электроприводом заключается в следу- ющем.
Х|
СЛ xj О
СО
чэ
Магнитный поток, создаваемый обмоткой, пропорционален току I, поэтому отставание или опережение тока I от противоЭДС Е (фиг 2), равной Uo , на угол а , приводит к тому, что вектор Фс суммарного магнитного потока статора (фиг. 3) также будет отклоняться от перпендикулярного положения по отношению к вектору Фр магнитного потока ротора на угол а , что снижает момент, развиваемый двигателем, и его КПД, поскольку неперпендикулярность полей ротора и статора вентильного двигателя приводит к появлению ненулевой проекции вектора магнитного поля статора на продольную ось ротора, которая, не создавая вращающего момента, в то же время требует протекания соответствующих составляющих токов обмоток, необ- ходимых для ев поддержания, что и приводит к снижению КПД двигателя вследствие бесполезного рассеяния мощности указанных составляющих фазовых токов на активном сопротивлении R обмоток. Для повышения КПД необходимо выполнить равенство нулю указанного угла а .
Из фиг 2 видно, что
UvsM-UK S
и,соф. Е +а%г.
где Q- afctgfTsoO
Uy KU,
где / - угол установки датчика положения ротора,
О - напряжение источника питания;
Uy - амплитуда напряжения, подводимого к якорной обмотке;
Е - противоЭДС якорной обмотки;
К - коэффициент пропорциональности;
Тэ - электромагнитная постоянная времени синхронной машины;
(а - частота вращения ротора синхронной машины.
Решив совместно приведенные выше уравнения, находим значение угла а
«-
а при а- 0, получим
в -arcsin ( ,.,) +
WV1 + Tiof 4- агс1д()
где (о - частота вращения холостого хода.
Как видно из полученного решения, равенство ft 0 может быть обеспечено только при условии
Тэй/2
,
KftvVTTTfftTl
0
5
0
5
0
5
0
в противном случае угол а должен быть выбран минимальным по абсолютному значению. Угол / , удовлетворяющий указанному требованию, найдем, исследовав на минимум функцию
,)-
Дифференцируя последнее выражение по /5 и приравнивая результат нулю, получаем
а№о
р -arccos ()
Способ в устройстве реализуется следующим образом.
Угол (р положения ротора синхронной машины 8 и его частота вращения преобразуются в коды,
В соответствии со способом управления угол /3 установки датчика положения ротора изменяют в зависимости от управляющего воздействия параметра К и частоты вращения ротора, Вследствие сложности зависимости / от К и о , как это видно из формулы изобретения, наиболее простое вычисление угла р осуществляется с помощью ПЗУ 12. При этом на младшие I разрядов ПЗУ 12 поступает код v частоты вращения ротора, а на старшие m-код управляющего воздействия Q, таким образом формируется адрес ячейки В По указанному адресу из ПЗУ 12 извлекается код G угла / установки датчика положения ротора
G
-arcsin(C) + arctg(-b)
JSJj 2jji uiwiM |
npnjc s 1,
et- cos),
при JC 1,
где
C
(2m - 1)
Q(2-1)
Коды датчика 10 положения ротора и ПЗУ 12 обрабатываются в арифметическом блоке 11 в соответствии со способом управления, т.е. осуществляется операция вычисления адреса А ячейки ПЗУ 13 А pF + G.
Таким образом определяется аргумент гармонических функций +fi. Выходной код арифметического блока 11 является входным для ПЗУ 13, в котором записаны коды длительности и знаки импульсов для каждой из фаз якорной обмоток синхронной машины, при этом в S(i-1) + 1 SI-1 разрядах
сформированы коды RI длительности в соответствии с законом sin(p{p +
РО-1).е. R, ( 25-фп 2
л(А/Ат + p(i-1)/n. кроме того в Si разрядах указываются соответствующие знаки импульсов, т.е. в ячейке с адресом А содержится код
(28-М) + %1г(2я(А/Ат
У
+
+ p(i-1)/n)} +2si-1 -I. где 3S - разрядность выходного слова ПЗУ 13;
Am - наибольшее значение адреса в ПЗУ 13, определяемое его емкостью;
е 1, при sfn (2л(Д + p(i - 1)/п))0;
я™
е 0, при sin (2л(- + p(i - 1)/п))0
Блок 1 перемножения производит перемножение кода управляющего воздействия Q, формируемого внешним устройством (на фигурах не показано), с кодами тригонометрических функций, поступающих с ПЗУ 13, следующим образом. Код управляющего воздействия Q поступает на вход управляемого делителя частоты, на второй вход кото- рого - выход генератора 2 высокой частоты. импульсы с выхода которого следуют с частотой f. На выходе управляемого делителя 3 частоты будут присутствовать импульсы с частотой f/Q. Длительности импульсов в ей- де кодов RI, поступающих с ПЗУ 13, записываются в ШИМ 4 - ШИМ 6, на вычитающие входы которых поступает частота f/Q, при этом длительность выходных импульсов будет равн RiQ/f. Если коды RI записываются в ШИМ 4 - ШИМ 6 с частотой fi, то для нормальной работы блока 1 необходимо, чтобы 12s 2m. Тогда длительность выходных импульсов будет равна RiQ /(fi2s
или
JK|sln( p(i-1)
Широтно-модулированные импульсные последовательности усиливаются в усилителе 7, который фактически производит перемножение KJsin(p) + 2л p(i-1)/n + fi на напряжение источника питания U, и поступают на фазы якорной обмотки синхронной машины 8. Таким образом, угол установки датчика угла зависит от частоты у вращения ротора синхронной машины и от параметраК,учитывающего неперпендикулярность магнитных полей ста
тора и ротора. Следовательно, исключаются ненулевые проекции вектора магнитного поля статора на продольную ось ротора, что приводит к увеличению вращающего момента.
Формула изобретения Способ управления вентильным электродвигателем постоянного тока с датчиком положения ротора на валу его синхронной машины, при котором измеряют угол положения ротора синхронной машины вентильного электродвигателя и его частоту вращения и подводимое к одной из фаз якорной обмотки синхронной машины напряжения изменяют в функции указанных измеренных параметров и угла установки датчика положения ротора по закону
Ui KUsin{P + (и) + р},
дополнительно по определенному закону изменяют угол установки датчика положения ротора в зависимости от частоты вращения ротора синхронной машины, отличающийся тем, что, с целью повышения КПД, указанное изменение угла установки датчика положения ротора осуществляют по закону
а. fТэОГч .
р -arcsm ( -9-т-) +
WyTTr&ftF
+ агстд(ТэйУ),
при|
Тэй/2
w KvTTrift
rK«x,
&
-arccos
(О
+ ,эс
где К - коэффициент пропорциональности, учитывающий неперпендикулярность магнитных полей статора и ротора синхронной машины;
U - напряжение источника питания;
р - число пар полюсов;
п - число фаз якорной обмотки синхронной машины;
ft - угол установки датчика положения ротора;
L, R - индуктивность и активное сопротивление якорной обмотки;
Тэ ргг - электромагнитная постоянная времени двигателя;
со х - частота вращения холостого хода; со - частота вращения ротора синхронной машины.

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления вентильным электродвигателем постоянного тока | 1989 |
|
SU1757040A1 |
| Вентильный электропривод | 1986 |
|
SU1670752A2 |
| СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА | 1991 |
|
RU2016473C1 |
| Вентильный электропривод с цифровым управлением | 1988 |
|
SU1582291A1 |
| Вентильный электропривод | 1990 |
|
SU1791953A1 |
| Способ торможения бесконтактного двухфазного вентильного электродвигателя | 1989 |
|
SU1721770A1 |
| СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА | 1991 |
|
RU2016474C1 |
| Способ управления вентильным электродвигателем | 1989 |
|
SU1690160A1 |
| Вентильный электропривод с непосредственным питанием от сети переменного тока | 1989 |
|
SU1721738A1 |
| СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА | 1991 |
|
RU2016472C1 |
Изобретение относится к электротехнике. Целью изобретения является повышение КПД с этой целью в способе управления вентильным электроприводом одновременно с изменением напряжения, подводимого к фазе якорной обмотки синхронной машины, в функции частоты вращения ротора синхронного машины и угла установки датчика положения ротора изменяют и угол установки датчика положения ротора в функции частоты вращения ротора синхронной машины и параметра, определяемого конструкцией синхронной машины, учитывающего неперпендикулярность магнитных полей статора и ротора синхронной машины. 3 ил е
| Овчинников И.Е., Лебедь Н.И, Бесконтактные двигатели постоянного тока | |||
| Л.: Наука, с | |||
| Способ обработки грубых шерстей на различных аппаратах для мериносовой шерсти | 1920 |
|
SU113A1 |
| Реверсивный дисковый культиватор для тросовой тяги | 1923 |
|
SU130A1 |
| Электронная техника в автоматике | |||
| Под ред | |||
| Ю.И.Конева, вып | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| М.: Радио и связь, 1985,с | |||
| Приспособление для подвешивания тележки при подъемках сошедших с рельс вагонов | 1920 |
|
SU216A1 |
| Известия Вузов | |||
| Электромеханика, 1986.№ 6, с | |||
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
