.-
Изобретение относится к электротехнике и может быть использовано в системах управления объектов различного назначения со стабилизированной частотой вращения.
Целью изобретения является повышение точности стабилизации скорости вращения.
На фиг. 1 пр едставлена блок-схема реверсивного вентильного электропри вода; на фиг,2-4 - варианты выполнения задатчика скорости, датчика положения и источника переменного тока на фиг.5 - принципиальная электрическая схема электропривода.
Реверсивный вентильный электродвигатель содержит синхронную машину 1 с постоянными магнитами на роторе 2 и двухфазными обмотками 3 и А якоря на статоре, одна из которых подклю чена к выходу усилителя 5 мощности, а другая - к выходу усилителя 6 мощности, и фазочувствительные выпрямители 7 и 8. На валу синхронной машины установлен датчик 9 положения, вьтолненный в виде вращающегося трансформатора с обмоткой 10 возбуждения и синусной и косинусной обмотки 11 и 12. Обмотка 10 возбуждения датчика 9 положения подключена к выходу задатчика 13 скорости. Электродвигател снабжен двумя обмотками 14 и 15 сравнения, фильтрами 16 и 17 нижних частот и фильтрами 18 и 19 верхних частот,
Задатчик 13 скорости может быть вьтолнен в виде источника 20 переменного тока (фиг.2), источника 21 постоянного тока и сумматора 22, входы которого подключены к выходам источников 20 и 21, а выход сумматора образует выход задатчика скорости
п.-
Кроме того, датчик положения может быть снабжен дополнительной об- моткой 23 возбуждения (фиг.З), подключенной к выходу задатчика 13 скорости, образованному выходом источника 21 постоянного тока, при этом основная обмотка 10 возбуждения дат- чика 9 положения подключена к выходу задатчика скорости, образованному выходом источника 20 переменного тока,
В качестве сумматора 22 может быт использован суммирующий операционный усилитель или сумматор на резисторах
Источник 20 переменного тока (фиг.4) может быть вьтолнен, наприO
5
5
0
5
0
0
5 0
5
мер, в виде потенциометра 24, запи- танного постоянным напряжением U,,. Средняя точка потенциометра 24 подключена к общей шине 25, а движок соединен с входами операционного усилителя 26 с единичным коэффициентом усиления, неинвертирующий вход которого соединен также с общей шиной 25 через ключ, выполненный на транзисторе 27, На базу транзистора 27 через резистор 28 подается опорное напряжение Ц , В качестве опорного напряжения Ug может быть использовано напряжение сети переменного тока, например 400 Гц или другое, специально сформированное напряжение переменного тока прямоугольной или синусоидальной формы, обеспечивающее коммутацию ключа на тран-- зисторе 27, Выход операционного усилителя 26 соединен с обмоткой 10 возбуждения датчика 9 положения.
Кроме того, источник 20 переменного тока (фиг.4) может быть выполнен, например, в виде трансформатора 29, на первичную обмотку которого подается опорное напряжение U , а вторичная обмотка соединена с по- тенционетром 30, движок которого подключен к обмотке 10 возбуждения датчика 9 положения. Средние точки трансформатора 29 и потенциометра 30 соединены с общей шиной 25.
Источник 21 постоянного тока (фиг.З) выполнен в виде потенгдаомет- ра 315 запитанного постоянным напряжением Движок потенциометра соединен с дополнительной обмоткой 23 возбуждения датчика 9 положения.
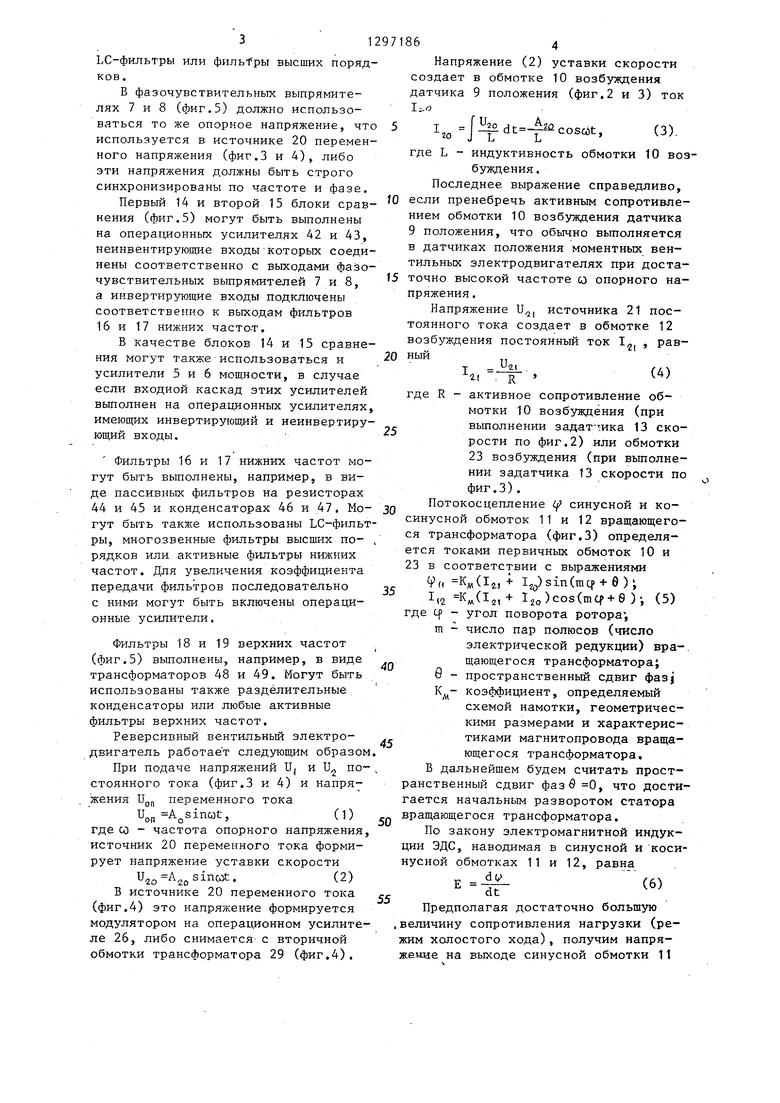
Фазочувствительные выпрямители 7 и 8 (фиг.З) могут быть вьтолнены, нащэимер, на базе операционных усилителей 32 и 33 с единичным коэффициентом усиления, входы каждого из которых соединены соответственно с выходами фильтров 18 и 19 верхних частот, а неинвертирующие входы соединены с общей пшной 25 через ключи, выполненные на. транзисторах 34 и 35. На базы транзисторов 34 и 35 подано опорное напряжение через резисторы 36 и 37.
Выходы операционных усилителей 32 и 33 соединены ,с входами блоков 14 и 15 сравнения через фильтры нижних частот, выполненные, например, на резисторах 38 и 39 и конденсаторах 40 и 41. Могут также применяться
LC-фильтры или фильтры высших порядков.
в фазочувствительных выпрямителях 7 и 8 (фиг.5) должно использоваться то же опорное напряжение, что используется в источнике 20 переменного напряжения (фиг.З и 4), либо эти напряжения должны быть строго синхронизированы по частоте и фазе.
Первый 14 и второй 15 блоки сравнения (фиг.З) могут быть выполнены на операционных усилителях 42 и 43, неинвентирующие входы которых соединены соответственно с выходами фазочувствительных выпрямителей 7 и 8, а инвертирующие входы подключены соответственно к выходам фильтров 16 и 17 нижних часто-т,
В качестве блоков 14 и 15 сравнения могут также использоваться и усилители 5 и 6 мощности, в случае если входной каскад этик усилителей выполнен на операционных усилителях, имеющих инвертирующий и неинвертирующий входы.
Фильтры 16 и 17 нижних частот могут быть выполнены, например, в виде пассивных фильтров на резисторах 44 и 45 и конденсаторах 46 и 47. Могут быть также использованы LC-фильтры, многозвенные фильтры высших по- рядков или активные фильтры нижних частот. Для увеличения коэффициента передачи фильтров последовательно с ними могут быть включены операционные усилители.
Фильтры 18 и 19 верхних частот (фиг.5) вьшолнены, например, в виде трансформаторов 48 и 49. Могут быть использованы также разделительные конденсаторы или любые активные фильтры верхних частот.
Реверсивный вентильный электродвигатель работае т следующим образом
При подаче напряжений U, и U по- стоянного тока (фиг.З и 4) и напряжения U-. переменного тока
Uon A sincot,
(1)
где со - частота опорного напряжения, источник 20 переменного тока формирует напряжение уставки скорости
)
В источнике 20 переменного тока
(фиг,4) это напряжение формируется модулятором на операционном усилителе 26, либо снимается с вторичной обмотки трансформатора 29 (фиг,4).
Напряжение (2) уставки скорости создает в обмотке 10 возбуждения датчика 9 положения (фиг,2 и 3) ток
А
(3). 10 воз- 0 J , где L - индуктивность обмотки буждения.
Последнее выражение справедливо, если пренебречь активным сопротивлением обмотки 10 возбуждения датчика 9 положения, что обычно выполняется в датчиках положения моментных вентильных электродвигателях при достаточно высокой частоте со опорного напряжения .
Напряжение источника 21 постоянного тока создает в обмотке 12
возбуждения постоянный ток I
нь1й
21
,
и.
R
(4)
25
30
35
0
5
0
5
где
m R - активное сопротивление обмотки 10 возбуждения (при выполнении задат-тика 13 скорости по фиг.2) или обмотки 23 возбуждения (при выполнении задатчика 13 скорости по фиг.З).
Потокосцепление (f синусной и косинусной обмоток 11 и 12 вращающегося трансформатора (фиг.З) определяется токами первичных обмоток 10 и 23 в соответствии с выражениями Ф(« KM(II, + Vsin(mq. + e)i 1,2 К„(1,г, + l2o)cosXmCf + 0 )-, (5) где q - угол поворота ротора;
число пар полюсов (число электрической редукции) вра-. щающегося трансформатораJ пространственный сдвиг фаз коэффициент, определяемый схемой намотки, геометрическими размерами и характеристиками магнитопровода вращающегося трансформатора, В дальнейшем будем считать пространственный сдвиг фаз б 0, что достигается начальным разворотом статора вращающегося трансформатора.
По закону электромагнитной индукции ЭДС, наводимая в синусной и косинусной обмотках 11 и 12, равна
(6)
б К.
Е
dt
Предполагая достаточно большую величину сопротивления нагрузки (режим холостого хода), получим напря- ж&ние на выходе синусной обмотки 11
dqi,) ,d(, dt Mt
dtp,, dcf
dt
dCf),
dcf dt
dCf
ir.),
(7)
- частота (скорость) вра- . щения ротора 2. ение (7) получено в соответправилом дифференцирования функции.
авляя в (7) вьфажение (5), после преобразований
+ и и (О + и;,(,., + и ,
. . ) sinotsinmcf - синфазная высокочастотная сое(9)
тавляющая,
и
(к)
.,coso: tcosm - квадратурная высокочастотная
составляющая (Ю) и II
и„ K-U,j, Л cosm tp-низкочастотная составляющая (11)
КмП
(12)
Синфазная (9) и квадратурная (10). составляющие определяются относительно фазы опорного напряжения и,, .
Аналогично можно получить выражение для напряжения на выходе косинус- -30 ной обмотки 12:
и,2 и, 2(с) + и ,2(м + ; (13)
где и, 2(с) K5Ajo sincjtcosmcf; (14) KaAioCos«tcosmcp, (15)
Кц - коэффициент усиления усилителей 5 и 6 мощностиj
К - коэффициент,передачи блоков 14 и 15 сравнения,
В ссУответствии с принципом дейст- ;вия вентильного электродвигателя эти.напряжения образуют в расточке статора синхронной маимны 1 вращающееся магнитное поле, которое созда-
l KgUj, П sinmc.
(16) Э5 вращающий момент двигателя, при- водяш й ротор 2 во вращение с частотой, пропорциональной амплитуде фазных напряжений Ug, и U . Следовательно,
40
45
К А (p)K,K;A2o-W,, (р)а,
(23)
где Kg. - коэффициент, определяемый конструктивными параметрами синхронной машины 1, , и,(р)(р)к э и,,.. (24) Решая уравнение (23) относительно Л , получим
Для нормальной работы вентильного электродвигателя частота опорного напряжения выбирается гораздо больше частоты вращения синхронного двигателя 1 (обычно на два порядка) О О.
образом, высокочастотные составляющие (9), (10), (14), (15) и низкочастотные составляющие (11), (16) синусных и косинусных обмоток 11 и 12 могут быть легко разделены фильтрами 18 и 19 и нижних 16 и 17 частот (фиг,1 и 5), на выходах которых получим напряжения
и,з KeU;, и„ KeU;, , (17)
и,б WH(P)U,, , и,7 н(рЖ , (18) где - коэффициент передачи
фильтров 18 и .19 верхних частот;у г )
W/P)-передаточная функция фильт- 55 где Wjj(p) ,
ров 16 и 17 нижних частот.(ЛРДля нормальной работы устройства
Фазочувствительные выпрямители 7 необходимо выполнение следующих ус- и 8 (фиг,1 и 5) выделяют огибающие ловий:
50 о .KnWip(p)KaK э 1+К,
iO
КпУоЛр) , . S l+K,Woc(p)
(25)
-
2971866
синфазных сигналов (9), (14)на выходах фильтров 18 и 19 верхни х частот и подавляют квадратурныесоставляющие сигналов (10), (15) 5 (p)Kj Кэ A sinmcf ;(19) (p)Ke Кэ A cosincf ,(20)
fO
f5
20
где Wjp(p) - передаточная функция
фазочувствительных вы- прям-гтелей 7 и 8.
Б блоках 14 и 15 сравнения из этих напряжений вычитаются напряжения и и,7 , вьщеленные фильтрами 16 и 17 нижних частот. Полученные сигналы рассогласования после усиления в усилителях 5 ,и 6 мощности поступают на фазные обмотки 3 и 4 синхронного двигателя 1 в виде фазных напряжений:
U5- KyKj-(U7-U,6 )A sinmq / (21) (U8-U, )A(pCosinq)j (22)
где ,,,(p)
-Уц(р)К э Uji - амплитуда фазных напряжений.
Кц - коэффициент усиления усилителей 5 и 6 мощностиj
К - коэффициент,передачи блоков 14 и 15 сравнения,
В ссУответствии с принципом дейст- ;вия вентильного электродвигателя эти.напряжения образуют в расточке статора синхронной маимны 1 вращающееся магнитное поле, которое созда-
той, пропорциональной амплитуде фазных напряжений Ug, и U . Следовательно,
К А (p)K,K;A2o-W,, (р)а,
(23)
где Kg. - коэффициент, определяемый конструктивными параметрами синхронной машины 1, , и,(р)(р)к э и,,.. (24) Решая уравнение (23) относительно Л , получим
50 о .KnWip(p)KaK э 1+К,
iO
у г )
КпУоЛр) , . S l+K,Woc(p)
(25)
к,/к„и„, (р)/ 1, (26)
argW(p)argW(p), (27) где KQ - глубина обратной связи по скорости.
Первое условие (26) означает, что глубина обратной связи по скорости двигателя выбирается достаточно большой. Это достигается, например, подбором коэффициента усиления Ку усилителей 5 и 6 мощности, а также ре- гулировкой напряжения постоянного тока, выполняемой потенциометром 31 (фиг.З).
Второе условие требует равенства фазочастотных характеристик фильтров 16 и 17 нижних частот и фазочувстви- тельных выпрямителей 7 и 8, что достигается выбором параметров фильтров .16 и 17 нижних частот, либо КС-ф1-шьт ров на элемента: 38-41 , входящих в состав фазочувствител ьных выпрямителей 7 и 8 (фиг.З).
Тогда при выполнении условий (26) и (27) выражение (25) примет вид
а к„А,
где (p)/ |-MPl /K,K, (29)
Таким образом, предлагаемое устройство поддерживает скорость ревер- сивного вентильного электродвигателя пропорционально амплитуде напряжения переменного тока на обмотке 10 возбуждения датчика 9 положения, т.е. напряжения уставки скорости. При этом плавное изменение скорости вентильного электродвигателя и его реверс осуществляются, например, потенциометром 24 (фиг.З) или потенциометром 30 (фиг.4).
Положительный технический эффект от применения предлагаемого изобретения заключается в повышении точности стабилизации скорости (частоты) вращения электродвигателя путем введения отрицательной обратной связи по частоте вращения.
В процессе эксплуатации изменение момента нагрузки, температуры окружающей среды или других возмущающих факторов приводит к изменению коэффициентов передачи двигателя Kg. или усилителей мощности К, вызывающих в соответствии с (24) изменение коэффициента К на величину ДК.
При наличии отрицательной обратной связи с глубиной KQ относительно изменение частоты вращения Sa, как следует из (25) . будет в К раз.
5
-
15
20
25
305 40
455055
меньшего К„/Кд, где8К„ лКп/К,.
Таким образом повышение точности стабилизации частоты вращения достигается в устройстве также за счет уменьшения влияния изменения параметров вращающегося трансформатора за счет исключения ошибки, вызванной изменением размеров и характеристик, магнитопровода, так как эти изменения влияют в одинаковой степени на прямой канал и канал обратной связи.
Форму л а изобретения
1. Реверсивный вентильный электродвигатель, содержащий синхронную машину с двухфазной обмоткой якоря на .статоре, датчик положения выполненный в виде вращающегося трансформатора с обмоткой возбуждения, синусной и косинусной обмотками, механически соединенный с ротором синхронной машины, задатчик скорости, выходом связанный с обмоткой возбуждения датчика положения, два фазочувствитель- ных выпрямителя, два усилителя мощности, выход каждого из которых подключен к соответствующей фазной обмотке якоря синхронной машины, о т- л и ч а ю щ и и с я тем, что, с целью повьш1ения точности стабилизации скорости вращения, в него введены два блока сравнения, каждый из которых по первому входу и выходу включен между соответствующим фаз очувст- вительным выпрямителем и усилителем мощности, два фильтра верхних частот, один из которых включен между синусной обмоткой датчика положения и первым фазочувствительным выпрямителем, а другой - между косинусной об- моткой датчика положения и другим фазочувствительным выпрямителем, и два фильтра нижних частот, вход первого из которых подключен к синусной обмотке датчика положения, выход соединен с вторым входом второго блока сравнения, вход второго фильтра нижних частот подключен к косинусной обмотке датчика положения, а выход соединен с вторым входом первого блока сравнения.
2. Электродвигатель по п.1, от- личающийся тем, что задатчик скорости выполнен в виде источника переменного тока, источника постоянного тока и сумматора, два входа которого соединены с выходами указанных источников, а выход сумматора образует выход задатчика скорости.
3. Электродвигатель по п,1, о т- личающийся тем, что датчик положения снабжен дополнительной об1297186-10
моткой возбуждения, а задатчик скорости выполнен в виде источника переменного тока, выход которого является первым выходом задатчика скорости, и источника постоянного тока, выход которого образует второй вькод задатчика скорости и подключен к дополнительной обмотке возбуждения датчика положения.
Qm ротора 2
(Jon
(pi/e.3


| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электродвигатель | 1988 |
|
SU1573508A1 |
| Моментный вентильный электродвигатель | 1988 |
|
SU1582292A1 |
| Реверсивный вентильный электродвигатель | 1983 |
|
SU1153381A1 |
| Вентильный электродвигатель | 1986 |
|
SU1418879A1 |
| Следящий вентильный электропривод | 1982 |
|
SU1241400A1 |
| Вентильный электродвигатель | 1986 |
|
SU1418880A1 |
| Бесконтактный регулируемый электропривод | 1982 |
|
SU1075344A1 |
| Устройство для управления вентильным электродвигателем | 1981 |
|
SU972646A1 |
| Реверсивный вентильный электродвигатель | 1983 |
|
SU1132329A1 |
| Моментный вентильный электродвигатель | 1981 |
|
SU995218A1 |

Изобретение относится к электро- технике и может быть использовано в системах управления объектов различного назначения. Целью изобретения является повышение точности стабилизации частоты вращения. Указанная цель достигается тем, что в реверсивный вентильный электропривод введены два блока 14 и 15 сравнения, два фильтра 16 и 17 низких частот и два фильтра (Ф) 18 и 19 высоких частот. Введение указанных блоков обеспечивает наличие отрицательной обратной связи и исключает влияние на частоту вращения изменения параметров датчика 9 положения. 2 з.п. ф-лы, 5 ил. (pUS.i
Uon
20
К о5ттке 2 toy /w fivi /ir
Фб/г.«
Редактор Ю.Середа
Составитель А.Головченко
Техред Л.Сердюкова КорректорЛ.Патай
Заказ 792/59Тираж 661Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул,Проектная,4
.5
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 0 |
|
SU327552A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Столов Л.И..Авиационные моментные двигатели | |||
| М.: Нашиностроенио,, 1979, с.58-60. | |||
