Предлагаемое изобретение относится к области электротехники и может быть использовано при проектировании источников питания, выполненных на основе механоэлектрических систем генерирования, применяемых в летательных аппаратах, судах, других транспортных средствах и автономных объектах.
Известны бесконтактные синхронные генераторы с магнитоэлектрическим возбуждением, стабилизация выходного напряжения которых осуществляется изменением магнитного сопротивления цепи якоря за счет введения дополнительной тороидальной подмагничивающей обмотки [А.И.Бертинов «Авиационные электрические генераторы», учебное пособие, М., 1959. Государственное издательство оборонной промышленности, 1959 г., с.338-341]. Данные генераторы имеют ограниченные возможности регулирования напряжения при изменении частоты вращения в широком диапазоне, что является их недостатком. Применяемые в этом случае преобразователи уровня напряжения имеют повышенные массогабаритные характеристики. Это обусловлено тем, что вся генерируемая мощность, за исключением мощности нагрузки, должна быть поглощена преобразователем. Кроме того, системы стабилизации напряжения с подобными генераторами имеют относительно низкий коэффициент мощности.
Для стабилизации уровня напряжения при изменении скорости вращения в широком диапазоне известно применение синхронных бесконтактных генераторов с комбинированным возбуждением [Электрооборудование летательных аппаратов: учебник для вузов. Т.1, под ред. С.А.Грузкова. - М.: Издательство МЭИ, 2005 г., с.180-184]. Повышенные массогабаритные показатели электромеханического преобразователя и высокая трудоемкость изготовления ограничивают применение таких генераторов.
Известен также синхронный бесконтактный генератор, содержащий ротор с постоянными магнитами и якорь с m-фазной рабочей и m-фазной дополнительной обмотками, соединенными по схеме звезда, выходные выводы рабочей обмотки присоединены к нагрузке через промежуточный фильтр, а выходные выводы дополнительной обмотки присоединены к внешней системе стабилизации напряжения нагрузки [патент РФ на полезную модель №81609 от 05.12.2008]. Данный генератор наиболее близок к предлагаемому устройству и является прототипом. К недостаткам прототипа следует отнести существенную зависимость выходного напряжения рабочей обмотки при изменении скорости вращения и, как следствие, необходимость внешней схемы стабилизации напряжения генератора, что ограничивает его функциональные возможности. Кроме того, необходимость дополнительных выводов от якоря для подключения дополнительной обмотки к внешней схеме стабилизации напряжения снижает надежность генератора.
Технический результатом, который достигается при использовании предлагаемого синхронного бесконтактного генератора, является расширение функциональных возможностей генератора за счет уменьшения его выходного напряжения при изменении скорости вращения и тока нагрузки и увеличение надежности за счет сокращения числа внешних выводов от якоря генератора.
Технический результат достигается за счет того, что в синхронном бесконтактном генераторе, содержащем ротор с постоянными магнитами и якорь с m-фазной рабочей и m-фазной дополнительной обмотками, соединенными по схеме звезда, выходные выводы рабочей обмотки которого присоединены к нагрузке, согласно изобретению выходные выводы дополнительной обмотки соединены между собой, причем фазные зоны рабочей и дополнительной обмоток совмещены, а их витки расположены в общих пазах якоря.
Кроме того, в каждую фазу дополнительной обмотки может быть включен последовательно конденсатор, вторые выводы которых объединены в общую точку.
На Фиг.1 представлена конструктивная схема предлагаемого генератора.
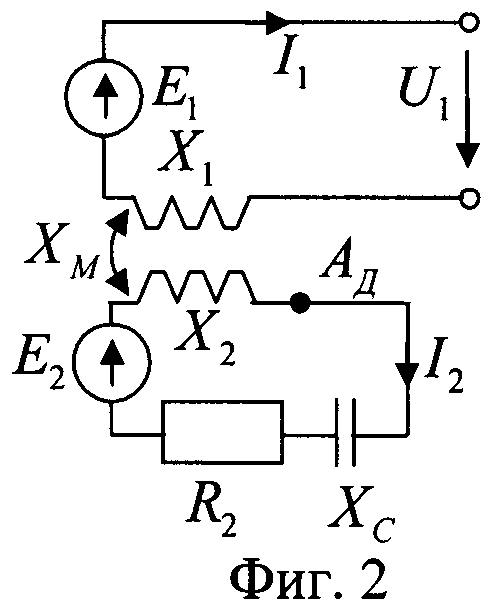
На Фиг.2 приведена упрощенная схема замещения фазы генератора.
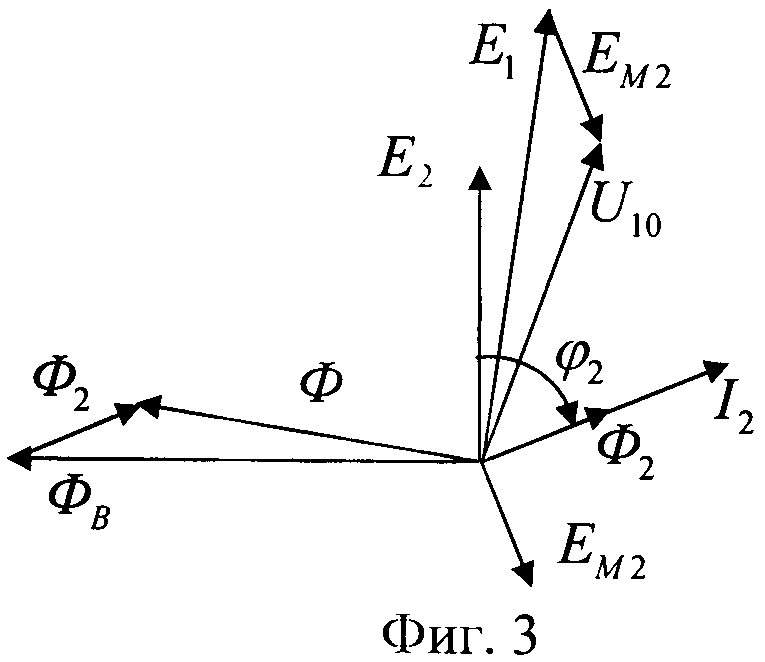
На Фиг.3 приведена векторная диаграмма, поясняющая работу генератора в режиме холостого хода.
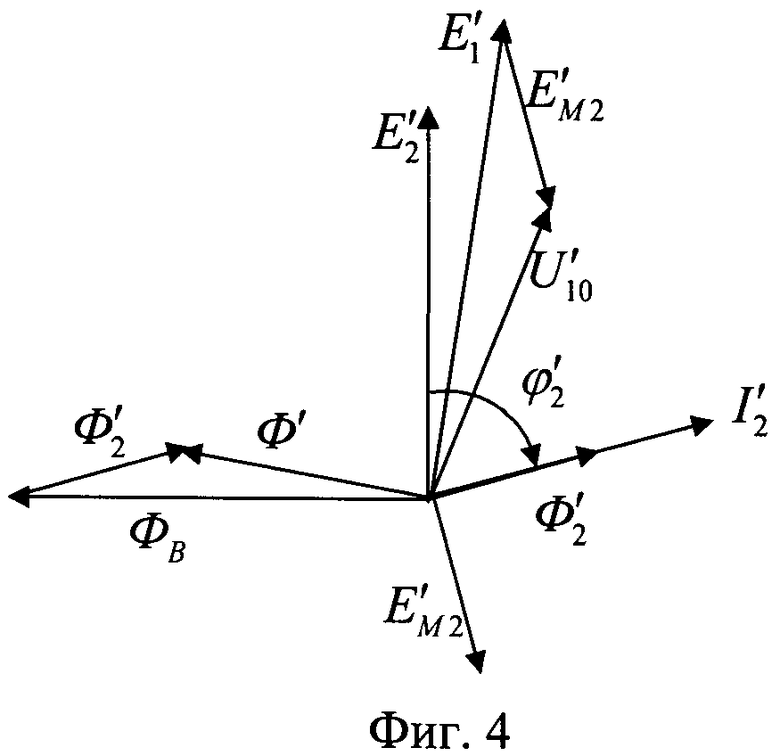
На Фиг.4 приведена векторная диаграмма, поясняющая работу генератора в режиме холостого хода при увеличении скорости вращения ротора.
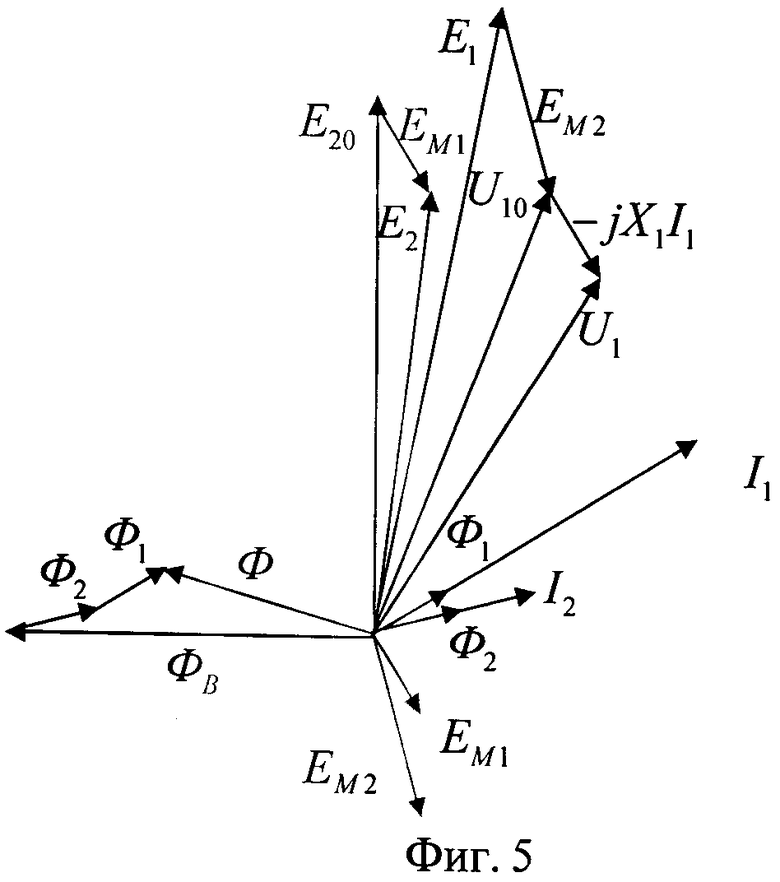
На Фиг.5 приведена векторная диаграмма генератора в нагруженном режиме.
На Фиг.6 представлен вариант генератора с дополнительно включенными конденсаторами.
Синхронный бесконтактный генератор (Фиг.1) содержит ротор 1 с постоянными магнитами для создания основного магнитного потока и якорь 2, который в свою очередь содержит рабочую (основную) обмотку 3 и дополнительную 4. Выходные выводы дополнительной обмотки (Ад, Вд, Сд) соединены между собой, а с выводов рабочей обмотки снимается выходное напряжение генератора. Для усиления магнитной связи между рабочей и дополнительной обмотками их одноименные фазные зоны совмещены, а витки рабочей и дополнительной обмоток расположены в общих пазах.
На Фиг.6 приведена схема генератора, в котором к выходным выводам каждой фазы дополнительной обмотки 4 присоединены конденсаторы 5, вторые выводы которых объединены в общую точку.
Устройство работает следующим образом.
Упрощенная схема замещения фазы генератора Фиг.1 приведена на Фиг.2. В соответствии со схемой замещения Фиг.2 напряжение на выходе генератора определяется выражением

где E1=К1ωФ - ЭДС вращения, наводимая результирующим магнитным
потоком Ф в фазе рабочей обмотки;
К1 - коэффициент пропорциональности;
ω - угловая частота вращения ротора;
 - ЭДС взаимной индукции, наводимая током дополнительной обмотки I2 и пропорциональная угловой частоте вращения ротора; М - коэффициент взаимной индукции между рабочей и дополнительной обмотками;
- ЭДС взаимной индукции, наводимая током дополнительной обмотки I2 и пропорциональная угловой частоте вращения ротора; М - коэффициент взаимной индукции между рабочей и дополнительной обмотками;
I1 - ток фазы рабочей обмотки;
Х1 - синхронное реактивное сопротивлении рабочей обмотки.
Таким образом, основными факторами, определяющими стабильность выходного напряжения генератора, являются изменение частоты вращения ω и тока нагрузки I1.
Оценим влияние частоты вращения в режиме холостого хода, когда ток фазы рабочей обмотки I1 (см. схему замещения Фиг.2) равен нулю. При вращении ротора 1 в фазах дополнительной обмотки 4 в соответствии с законом электромагнитной индукции наводится ЭДС, равная Е2=К2ωФВ, где K2 - коэффициент пропорциональности. Данная ЭДС на 90° отстает от вектора магнитного потока ФВ, созданного постоянными магнитами полюсной системы ротора, как это показано на векторной диаграмме Фиг.3. При этом в фазах дополнительной обмотки будет протекать ток I2, который на угол φ2 смещен относительно ЭДС Е2. Этот ток создает магнитный поток Ф2, который по отношению к магнитному потоку полюсной системы Фв является продольно размагничивающим. В результате результирующий рабочий магнитный поток в воздушном зазоре машины Ф уменьшается (векторная диаграмма построена при пренебрежении потоками рассеяния). Рабочий магнитный поток наводит в витках основной обмотки 3 якоря ЭДС Е1, которая отстает от этого потока на 90°. Кроме того в витках основной обмотки током дополнительной обмотки I2 наводится ЭДС взаимной индукции ЕМ2, которая на 90° отстает от вектора тока I2· В результате напряжение на выходе рабочей обмотки в режиме холостого хода будет равно
 .
.
Как видно из векторной диаграммы Фиг.3, выходное напряжение U10 меньше ЭДС вращения Е1, так как вектора  и
и  находятся практически в противофазе.
находятся практически в противофазе.
Таким образом, можно сделать вывод, что дополнительная обмотка уменьшает выходное напряжение основной обмотки за счет двух факторов: снижения результирующего магнитного потока, обусловленное продольно размагничивающей реакцией якоря, и противоЭДС взаимной индукции.
При увеличении скорости вращения ротора (предположим ω'=1.5ω) пропорционально возрастает ЭДС дополнительной обмотки  , как это показано на векторной диаграмме Фиг.4. Возрастает, но в меньшей степени, и ток дополнительной обмотки
, как это показано на векторной диаграмме Фиг.4. Возрастает, но в меньшей степени, и ток дополнительной обмотки  , который определяется выражением
, который определяется выражением

где R2 - активное сопротивление фазы дополнительной обмотки;
L2 - индуктивность дополнительной обмотки;
Х2=ωL2 - реактивное сопротивление дополнительной обмотки.
Одновременно возрастает и угол φ'2=arctg(ω`L2/R2), на который ток дополнительной обмотки отстает от ЭДС  В совокупности эти два фактора приводят к увеличению продольной размагничивающей составляющей реакции якоря
В совокупности эти два фактора приводят к увеличению продольной размагничивающей составляющей реакции якоря  от тока дополнительной обмотки. Как следствие, уменьшается результирующий магнитный поток Ф' в воздушном зазоре машины, что отображено на векторной диаграмме Фиг.4. Поэтому ЭДС вращения рабочей обмотки
от тока дополнительной обмотки. Как следствие, уменьшается результирующий магнитный поток Ф' в воздушном зазоре машины, что отображено на векторной диаграмме Фиг.4. Поэтому ЭДС вращения рабочей обмотки  возрастает в меньшей степени, чем увеличивается скорость вращения вала генератора ω'.
возрастает в меньшей степени, чем увеличивается скорость вращения вала генератора ω'.
С увеличением числа оборотов вала генератора и тока дополнительной обмотки возрастает также ЭДС взаимной индукции, наводимой в рабочей обмотке током дополнительной обмотки

В итоге изменение модуля напряжения на выходе генератора с увеличением скорости вращения ротора, относительно его исходного значения U10 (при соответствующем выборе параметров рабочей и дополнительной обмоток), может быть сведено к минимуму, что следует также из сопоставления векторных диаграмм Фиг.3 и Фиг.4.
Как уже отмечено ранее, кроме частоты вращения стабильность выходного напряжения генератора зависит и от тока нагрузки I1. Векторная диаграмма предлагаемого генератора при нагрузке индуктивного характера, когда ток рабочей обмотки отличен от нуля, приведена на Фиг.5. Ток нагрузки в этом случае создает магнитный поток Ф1, который по отношению к магнитному потоку полюсной системы также является продольно размагничивающим. Это приводит к дополнительному снижению рабочего магнитного потока Ф. Кроме того, в витках дополнительной обмотки током основной обмотки наводится ЭДС взаимной индукции ЕМ1.
При возрастании тока нагрузки с одной стороны за счет увеличения потока реакции якоря Ф1 и падения напряжения на синхронном реактивном сопротивлении рабочей обмотки (Х1I1) выходное напряжение уменьшается. Но с другой стороны, как это видно из векторной диаграммы Фиг.5, за счет ЭДС взаимной индукции ЕM1 уменьшается ЭДС дополнительной обмотки Е2, а следовательно, и ее ток I2. Одновременно уменьшаются поток реакции якоря этой обмотки Ф2 и ЭДС взаимной индукции ЕМ2. Рабочий магнитный поток Ф1 и связанная с ним ЭДС вращения рабочей обмотки Е1 возрастают. Увеличение ЭДС вращения Е1 и ЭДС взаимной индукции ЕМ1 способствуют тому, что в результате увеличения тока нагрузки выходное напряжение генератора изменяется незначительно.
Параметры дополнительной обмотки должны выбираться из условия обеспечения номинального напряжения при минимальных оборотах и максимальной нагрузке.
Если в каждую фазу дополнительной обмотки включить последовательно конденсатор, как это показано на Фиг.6, то габариты дополнительной обмотки (ампер витки) могут быть уменьшены. В этом случае при номинальных оборотах ωн реактивное сопротивление фазы дополнительной обмотки должно быть равно реактивному сопротивлению конденсатора
Поэтому при уменьшении скорости вращения сопротивление фазы дополнительной обмотки будет носить емкостной характер. Ток дополнительной обмотки будет создавать подмагничивающую реакцию якоря, которая компенсирует уменьшение ЭДС рабочей обмотки при снижении числа оборотов вала генератора.
При увеличении скорости относительно номинальной сопротивление фазы дополнительной обмотки будет носить индуктивный характер. Ток дополнительной обмотки будет создавать размагничивающую реакцию якоря, которая компенсирует увеличение ЭДС рабочей обмотки при возрастании числа оборотов вала генератора.
В отличие от прототипа, предлагаемый генератор имеет более высокую стабильность выходного напряжения при изменении частоты вращения вала генератора и тока его нагрузки, что расширяет его функциональные возможности в системах генерации стабильного напряжения переменного тока, и меньшее число выводов от якоря генератора, что увеличивает его надежность.

Изобретение относится к области электротехники и может быть использовано при проектировании источников питания, выполненных на основе механоэлектрических систем генерирования, применяемых в летательных аппаратах и других автономных объектах. Техническим результатом является уменьшение зависимости выходного напряжения от скорости вращения и тока нагрузки, что расширяет его функциональные возможности и увеличение его надежности за счет уменьшения числа выводов от якоря генератора. Синхронный бесконтактный генератор содержит ротор (1) с постоянными магнитами и якорь (2) с m-фазной рабочей (3) и m-фазной дополнительной (5) обмотками, соединенными по схеме звезда. Одноименные фазные зоны рабочей и дополнительной обмоток совмещены, а их витки расположены в общих пазах якоря. Ротор генератора (1) приводится во вращение валом первичного двигателя, пропорционально скорости которого изменяется частота и напряжение на выходе генератора. Зависимость выходного напряжения генератора на выходе рабочей обмотки уменьшается за счет размагничивающего действия потока реакции якоря, создаваемого дополнительной обмоткой (4). Дополнительным фактором, стабилизирующим выходное напряжение рабочей обмотки (3), является также ЭДС взаимной индукции, создаваемая дополнительной обмоткой (4) при увеличении скорости первичного двигателя или тока нагрузки. Таким образом, дополнительная обмотка обеспечивает внутреннюю отрицательную обратную связь по напряжению генератора. 1 з.п. ф-лы, 6 ил.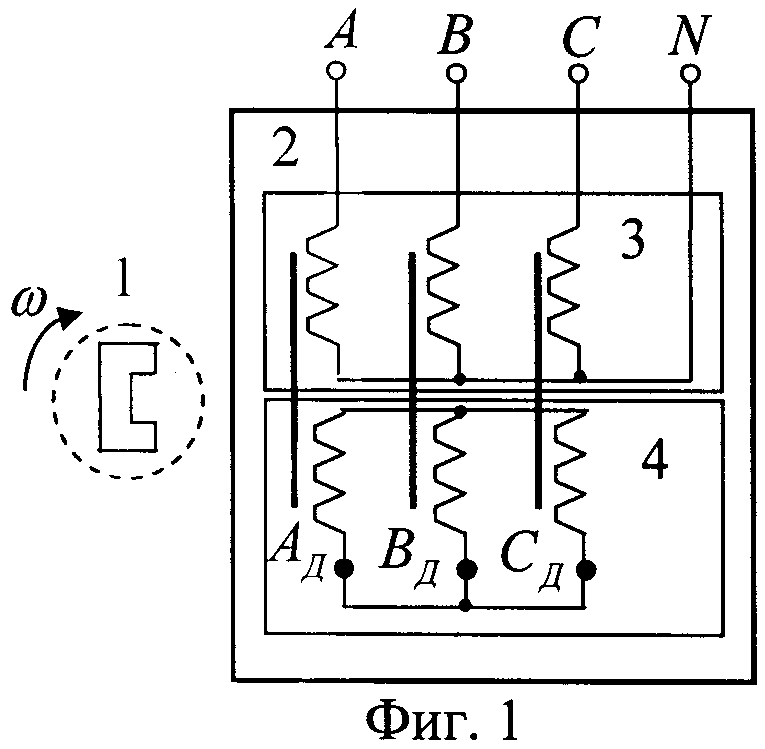
1. Синхронный бесконтактный генератор, содержащий ротор с постоянными магнитами и якорь с m-фазной рабочей и m-фазной дополнительной обмотками, соединенными по схеме звезда, отличающийся тем, что выходные выводы дополнительной обмотки соединены между собой, причем одноименные фазные зоны рабочей и дополнительной обмоток совмещены, а их витки расположены в общих пазах якоря.
2. Синхронный бесконтактный генератор по п.1, отличающийся тем, что к выходным выводам каждой фазы дополнительной обмотки присоединены конденсаторы, вторые выводы которых объединены в общую точку.
| СПОСОБ ПОЛУЧЕНИЯ ТЕПЛОИЗОЛЯЦИОННОГО ЯЧЕИСТОГО БЕТОНА (ВАРИАНТЫ) | 2004 |
|
RU2266271C1 |
| Механический загрузчик (штабелер) для камер | 1949 |
|
SU81609A1 |
| US 20060250116 A1, 09.11.2006 | |||
| US 7126313B2, 24.10.2006. | |||

