Изобретение относится к авиационной технике, а более конкретно к системам автоматического регулирования газотурбинного двигателя (ГТД).
Известна система регулирования частоты вращения ротора низкого давления газотурбинного двигателя, содержащая последовательно соединенные датчик частоты вращения ротора, блок сравнения с задатчиком, усилитель, воздушный редуктор и регулятор перепада давления на турбине.
В указанной системе в качестве задатчика регулятора перепада используется воздушный редуктор с переменной степенью редукции. Такое выполнение системы позволяет увеличить надежность регулирования ГТД. Однако для обеспечения устойчивости системы, построенной по такому принципу, необходимо ограничивать скорость изменения степени редукции воздушного редуктора.
Время изменения степени редукции от минимального до максимального значения в указанной системе составляет 6-8 с. Поэтому из-за малого быстродействия системы ее использование для обработки возмущений, требующих резких изменений перепада давлений на турбине, на режимах приемистости, сброса и др. , не представляется возможным. Кроме того, в такой системе регулирования запасы устойчивости могут существенно уменьшаться при изменении условий работы ГТД в широких пределах.
Целью изобретения является повышение быстродействия системы без снижения ее запасов устойчивости, а также расширение диапазона устойчивой работы системы при изменении внешних условий.
Это достигается тем, что система, содержащая последовательно соединенные датчик частоты вращения ротора, блок сравнения с задатчиком, усилитель, воздушный редуктор и регулятор перепада давления на турбине, дополнительно содержит сумматор, включенный в линию связи усилителя и воздушного редуктора, логический блок и последовательно соединенные датчик положения исполнительного органа воздушного редуктора, дифференцирующее звено и блок коммутации, второй вход которого через логический блок связан с выходом блока сравнения, а выходом - с одним из входов сумматора, а также последовательно соединенные датчик давления воздуха на входе в двигатель, фильтр, блок формирования и второе дифференцирующее звено, вход которого подключен к выходу блока сравнения, а выход - к одному из входов сумматора.
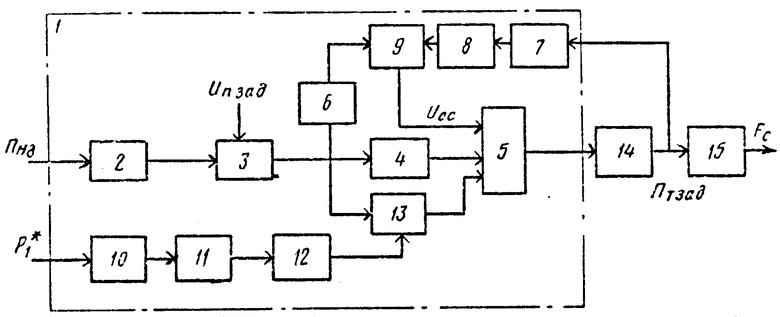
На чертеже изображена блок-схема предложенной системы регулирования.
Система содержит электронный регулятор 1 системы, включающий датчик 2 частоты вращения ротора, блок 3 сравнения с задатчиком, усилитель 4, сумматор 5, логический блок 6, датчик 7 положения исполнительного органа воздушного редуктора, дифференцирующее звено 8, блок 9 коммутации, датчик 10 давления воздуха на входе в двигатель, фильтр 11, блок 12 формирования постоянной времени и второе дифференцирующее звено 13. Система содержит также воздушный редуктор 14 и регулятор 15 перепада давления на турбине.
Система работает следующим образом.
Сигнал с датчика 2 частоты вращения поступает на блок 3 сравнения, где формируется сигнал рассогласования между фактическим и заданным значениями частоты вращения ротора низкого давления. Сигнал рассогласования через параллельно включенные дифференцирующее звено 13 и усилитель 4 поступает на сумматор 5. Сигнал с выхода сумматора 5 подается на астатический воздушный редуктор 14, являющийся задатчиком регулятора 15 (Пт) перепада давлений на турбине. При отклонении частоты вращения от своего значения, в системе возникает отличный от нуля сигнал рассогласования, который, управляя степенью редукции воздушного редуктора 14, изменяет заданное значение регулятора Пт, а следовательно и площадь Fc сопла ГТД таким образом, чтобы скомпенсировать сигнал рассогласования. Тем самым в двигателе устанавливается заданное значение частоты вращения ротора низкого давления.
При малых отклонениях оборотов n от установившегося режима ( | Δ n| ≅ 3% ) сигнал с логического блока 6, управляя блоком 9 коммутации, подключает к входу сумматора 5 сигнал Uос гибкой отрицательной обратной связи, снимаемый с датчика 7 положения исполнительного органа воздушного редуктора 14 и проходящий через дифференцирующее звено 8. При этом сигнал управления Пт.зад регулятором 15 перепада давлений на турбине может быть выражен через сигнал рассогласования Δ n следующим образом: Птзад= Kn(τдP+1) Δn-
Δn-  Uос , ( 1) где Uoc = Koc P . Пт.зад;
Uос , ( 1) где Uoc = Koc P . Пт.зад;
Δ n = nнд - nнд.зад; (2)
nнд - фактическое значение частоты вращения ротора низкого давления;
nнд.зад - заданное значение частоты вращения ротора низкого давления;
Кn - коэффициент передачи электронного регулятора;
Кпт - скоростной коэффициент воздушного редуктора;
Кос - коэффициент гибкой обратной связи;
τд - постоянная времени первого дифференцирующего звена;
Р - оператор Лапласа.
Из уравнений (1) и (2) получают
Птзад= Kп(τдP+1) n (3)
n (3)
При больших рассогласованиях (| Δ n| 3% ) блок 9 коммутации отключает гибкую обратную связь, т. е. Uoc = 0. При этом
Птзад= Kп(τдP+1) Δn (4) При сравнении уравнений (3) и (4) видно, что введение отключаемой отрицательной обратной связи позволяет без потери запасов устойчивости существенно повысить быстродействие системы регулирования за счет увеличения при больших рассогласованиях коэффициента усиления системы в (1 + Кос·Кпт) раз. Включение дифференцирующего звена в цепь обратной связи позволяет сохранить статическую точность регулирования частоты вращения, так как при таком включении система остается астатической.
Δn (4) При сравнении уравнений (3) и (4) видно, что введение отключаемой отрицательной обратной связи позволяет без потери запасов устойчивости существенно повысить быстродействие системы регулирования за счет увеличения при больших рассогласованиях коэффициента усиления системы в (1 + Кос·Кпт) раз. Включение дифференцирующего звена в цепь обратной связи позволяет сохранить статическую точность регулирования частоты вращения, так как при таком включении система остается астатической.
Сигнал с датчика 10 полного давления воздуха на входе в двигатель, проходя через фильтр 11 и блок 12 формирования постоянного времени, изменяет постоянную времени дифференцирующего звена 13 таким образом, чтобы скомпенсировать изменение запасов устойчивости системы и качества регулирования при изменении условий работы двигателя.
С помощью фильтра 11 повышается помехоустойчивость системы регулирования от высокочастотных помех на входе двигателя.
Таким образом, данная система выгодно отличается от известной тем, что позволяет повысить быстродействие и запасы устойчивости системы в широком диапазоне изменения условий работы ГТД при изменении внешних условий, на переходных и установывшихся режимах и т. д. Это, в свою очередь, существенно расширяет возможность использования такой системы для различных типов газотурбинных двигателей. (56) Гаевский С. А. и др. Автоматика авиационных газотурбинных силовых установок. М. , Воениздат, 1980, с. 84-85, рис. 5.3, 5.4.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГУЛИРОВАНИЯ ГАЗОТУРБИННОГО ПРИВОДА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2252329C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ С ФОРСАЖНОЙ КАМЕРОЙ СГОРАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2466287C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ С ФОРСАЖНОЙ КАМЕРОЙ СГОРАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2634997C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2006 |
|
RU2332580C1 |
| СИСТЕМА УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2395704C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2490492C1 |
| Способ управления турбогенератором | 2019 |
|
RU2729584C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2007 |
|
RU2351787C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ С ФОРСАЖНОЙ КАМЕРОЙ СГОРАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2652267C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2653262C2 |