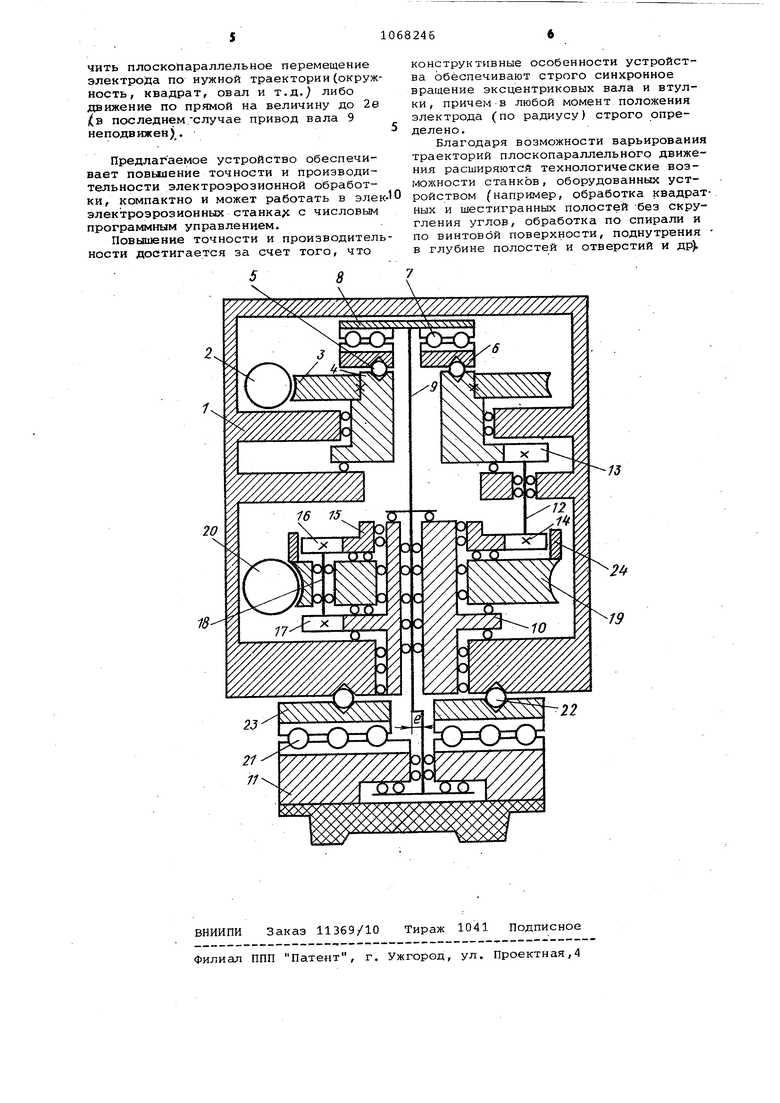
Изобретение отнсюится к электроэрозионным копировально-прошивочным станкам, более конкретно - к констг рукции узла, обеспечивакяцего плоскопараллельное движение электрода или заготовки в плоскости, перпендикуляр ной направлению движения главной подачи, т.е. подачи, осуществляющей копирование. Известно устройство, которое содержит эксцентриковые элементы - вал и втулку, каждый из которых приводит ся во вращение со своей скоростью своим двигателем (опорным и следящим скорость которого зависит от напряжения в эрозионном зазоре). Вал снаб жен поводком, KOTopi i он взаимодействует с упорами, установленными на солнечных колесах планетарного редуктора и ограничивающими угол смещения вала относительно втулки (,что позволяет задавать радиус траектории пределы изменения угла устанавливав ются с помощью третьего двигателя, раздвигающего упоры через планетарный механизм tl}Однако во время, электроэрозионной обработки в устройстве работают два двигателя - опорный и следяющий, в зависимости от разности их скоростей происходит следящая подача по радиусу траектории, максимальная величина радиуса устанавливается включением третьего двигателя. Такая конструкция порождает полную неопределенност положения электрода so всем интернале от нулевого эксцентриситета до максимального, заданного упорами. Из за этого снижается прочность обработ ки и требуются дополнительные проходы что ведет к потере производитель ности. Кроме того, наличие большого числа звеньев приводит к увеличению суммарной кинематической погрешности и недостаточной точности окончательной обработки с заданным эксцентриси тетом. Цель изобретения - повышение точности и производительности. Указанная цель достигается тем, что в устройстве для плоскопараллель ного движения, содержащем сопряженны вал и втулку с. равными эксцентрисите тами, Связывающий их планетарный механизм, электродвигатель для вращения эксцентрикового вала, а также двигатель для поворота втулки относи тельно вала, в кинематическую цепь .привода эксцентрикового вала введена крестовая муфта, первая из полумуфт которой неподвижно соединена с концом вала, эксцентричньам относительно оси вращения и свободно проходящим через вторую полумуфту, которая выполнена в одном блоке с червячным-и цилиндрическим зубчатыми колесами и со едид1ена с приводным электродвигателем через червячную передачу и с первой полумуфтой - через промежуточное звено с взаимно перпендикулярными направляющими с длиной хода, равного двойному эксцентриситету устройства, а в кинематическую цепь привода эксцентриковой втулки введен вал с двумя зубчатыми колесами, одно из которых входит в зубчатое зацепление с второй полумуфтой, а другое с центральным колесом планетарного механизма, в котором водило выполнено в виде имеющего автономный привод червячного колеса с установленным в нем эксцентрично с возможностью вращения сателлитом, который входит в зацепление с центральным колесом и с зубчатым венцом эксцентриковой втулки, при этом кинематические цепи, связывающие электродвигатель с,эксцентриковым валом и с эксцентриковой втулкой, выполнены с равными передаточными отношенит-ли. При этом, с целью повышения удобства эксплуатации, кинематическую цаь от водила к эксцентриковой втулке выполняют с передаточным отношением, равным едияице. На чертеже показана конструкция устройства. В неподвижном корпусе 1 установлен насаженный , на вал приводного электродвигателя (не показан червяк 2, который входит в зацепление с червячншл колесом 3, выполненным ,в одном блоке с цилиндрическим зубчатым колесом и полумуфтой 4.. Эта полумуфта имеет на торце направляющие с шариками 5, по которым ходит призма б, имеющая с двух сторон взаимно перпендикулярные направляющие, нижние с шариками 5 и верхние с шариками 7, по которым ходит полумуфта 8. Полумуфта 8 неподвижно соединена с эксцентриковым валом 9, который свободно проходит через отверстие в полумуфте 4 и установлен в подшипниках эксцентриковой втулки 10. На нижнем конце вала 9 посажена планшайба 11, несущая электрод-инструмент (ЭИ). Привод эксцентриковой втулки,10 включает вал отбора мощности 12 с зубчатыми колесами 13 и 14 и плане-тарный механизм, состоящий из центрального колеса 15, сателлита или пар:л сателлитов 16 и 17, неподвижно сидящих на валу 18 и передаюи;их крутящий, момент эксцентриковой втулке с зубчатым венцом 10. В планетарный механизм входит также червячное колесо 19, выполняющее функцию водила и имеющее привод от электродвигателя сг червяком 20 (двигатель на чертеже не показан). Центральное колесо 15 и водило 19 посажены на подшипники, установленные на втулке 10, а сама втулка установлена в подшипниках корпуса 1. Эксцентриситет вала 9 е равен эксцентриситету втулки 10. Механизм, преобразующий вращение эксцентрикового нижнего конца вала 9 в плоскопараллельное движение план шайбы 11, содержит кроме собственно планшайбы 11 и корпуса 1, имеющих взаимно перпендикулярные направляющие качения 21 и 22, также и промежуточную деталь 23, входящую в указанные направляющие. Передаточные отуошения кинематических -цепей эксцентрикового вала (от черв-яка 2 до вала 9) и эксцентриковой втулки (от червяка 2 до, втул ки 10 при неподвижном водиле 19): выполненыравными друг другу, а передаточное отношение кинематической цепи от водила 19 с лимбом 24 к втул ке 10 выполнено с передаточным отношением, равным единице. Для управления .двигателями в устройство включена система ЧПУ (не показана), которая включает блок управ ления эксцентриситетом, соединенный с двигателем водила, а также -блок управления углом поворота, соединенный с двигателем вращения эксцентрикового вала. Устройство работает следующим образом. При вращении червяка 2 вращается червячное колесо 3с пол.умуфтой 4, от нее через систему взаимно перпендикулярных направляющих качения 5 и 7 движение передается полумуфте 8 с валом 9. При этом вал 9 приводится во вращение с тем же числом оборотов что и полумуфта 4, несмотря, на смеще ние оси вращения вала 9 относительно оси вращения втулки 10. От той же полумуфты 4, имеющей цилиндрический зубчатый венец, вращение переда-ется шестерне 13, валу отбора мощности 12 зубчатому колесу 14, сцепленному с ним центральному колесу 15, сателлиту 16, валу 18, сателлиту 17 и от не го - также имеющей зубчатый венец втулке 10. Число зубьев у перечислен ных деталей взято таким, что передаточное отношение в цепи от полумуфты 4 к втулке 10 равно единице. Благода ря этому передаточное отношение в приводах как эксцентрикового вала 9 так и втулки 10 и то же, и они вращаются в одну сторону и с одинаковой угловой скоростью. При этом вал 9 во втулке 10 не проворачивается, а его эксцентриковый нижний конец приводит в движение планшайбу 11, которая бла 1одаря системе взаимно перпендикуляр ных направляющих с шариками 21 и 22 совершает плоскопараллельное движение по круговой траектории. Эксцентриситет е вала 9 всегда равен эксцентриситету втулки 10, что дает возможность р гулирова гь суммарный эксцентриситет (биение) нижней части эксцентрикового вала 9 относителВНо опорной поверхности втулки от О до величины 2 е. Изменение эксцентриситета осуществляется от автономного двигателя с насаженным на его вал червяком 20, который приводит во вращение червячное колесо 19. Это колесо песет вал 18 пары сателлитов 16 и 17 и при его вращении сателлиты 16 и 17 получают движение вместе с колесом 19 и дополнительное вращение вокруг своей оси. Это дополнительное вращение сателлит 17 передает эксцентриковой втулке 10, что ведет к относительному угловому смещению эксцентрикового вала 9 в этой втулке. В результате такого проворота втулки на валу происходит изменение суммарного эксцентриситета. Благодаря тому, что передаточное отношение от-водила 19 к втулке 10 сделано равньва , угол поворота золила и соответствующий ему угол поворота эксцентриковой втулки относительно вала 9 равны. Поскольку для изменения эксцентриситета от ноля до максимума достаточно проворота втулки 10 на , и такого же (на 180 jповорота водила 19, зубчатое колесо 14 не мешает сателлиту 16, который, не выходит за пределы зоны 180О на колесе 15 со стороны, противоположной участку зацепления с колесом 14. Указанное соотношение (передаточное отношение) вместе с особенностями конструкций обеспечивает поворот водила в пределах 180° вместо обычного в планетарных механизмах (дифференциалах) полного вращения, вследствие чего стало возможным зубчатое колесо -14, занимающее место второй пары сателлитов в обычных дифференциалах, установить на валу отбор мощности а вал установить в подшипниках неподвижно корпуса, что сильно упрощает всю конструкцию. Дополнительным удобством является вбмможность отсчета угла поворота труднодоступной втулки 10 по равному ему углу поворота червячного колеса 19. Оба входа планетарного механизма, т.е. двигатели с червяками 2 и 20 связаны с системой числового программного управления, задакяцей в полярной системе координат приращения эксцентриситета через поворот водила.19, а приращение угла - через совместный поворот эксцентриковой пары. Таким образом, задавая тот или иной закон в соотношениях приращений по радиусу и по углу, можно обеспечить плоскопараллельное перемещение электрода по нужной траектории(окружность , квадрат, овал и т.д. либо движение по прямой на величину до 2е |(в последнем/случае привод вала 9 неподвижен).5
Предлагаемое устройство обеспечивает повыиение точности и производительности электроэрозионной обработки, компактно и может работать в элек-Ю электроэрозионных станках с числовым программным управлением.
Повынюние точности и производительности достигается за счет того, что
конструктивные особенности устройства обеспечивают строго синхронное вращение эксцентриковых вала и втулки, причем-в любой момент положения электрода (по радиусу) строго определено.
Благодаря возможности варьирования траекторий плоскопараллельного движения расширяются технологические воэмохсности станков, оборудованных устройством (например, обработка квадратных и шестигранных полостей без скругления углов, обработка по спирали и по винтовой поверхности, поднутрения в глубине полостей и отверстий и др).
13
22
iOOCX
| название | год | авторы | номер документа |
|---|---|---|---|
| "Устройство для обработки трехмерных поверхностей | 1973 |
|
SU485850A1 |
| СПОСОБ РАСПРЕДЕЛЕНИЯ МОЩНОСТИ ДЛЯ ДИФФЕРЕНЦИАЛА ТРАНСПОРТНЫХ СРЕДСТВ | 1999 |
|
RU2156902C1 |
| МЕХАНИЗМ РЕГУЛИРОВКИ ХОДА ПОЛЗУНА КРИВОШИПНОГО ПРЕССА | 2002 |
|
RU2223862C2 |
| Радиально-поршневой эксцентриковый насос | 1975 |
|
SU514968A1 |
| Устройство для доводки плоских кольцевых поверхностей клиновых задвижек | 1990 |
|
SU1743836A1 |
| УНИВЕРСАЛЬНЫЙ ВЫСОКОМОМЕНТНЫЙ МНОГООБОРОТНЫЙ ЭЛЕКТРОПРИВОД ЗАПОРНОЙ АРМАТУРЫ ТРУБОПРОВОДНОГО ТРАНСПОРТА | 2011 |
|
RU2457385C1 |
| МЕХАНИЗМ РАСПРЕДЕЛЕНИЯ МОЩНОСТИ ДЛЯ ПРИВОДА ВЕДУЩИХ ОСЕЙ И КОЛЕС ТРАНСПОРТНОГО СРЕДСТВА | 1997 |
|
RU2125673C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЗАПОРНО-РЕГУЛИРУЮЩИМ ОРГАНОМ ТРУБОПРОВОДНОЙ АРМАТУРЫ И СПОСОБ НАСТРОЙКИ ЕГО ОГРАНИЧИТЕЛЯ МАКСИМАЛЬНОГО КРУТЯЩЕГО МОМЕНТА | 2005 |
|
RU2273784C1 |
| РЕДУКТОР С ЦИКЛОИДАЛЬНЫМ ЗАЦЕПЛЕНИЕМ | 1995 |
|
RU2123627C1 |
| Электропривод трубопроводной арматуры с ручным дублером | 2022 |
|
RU2797329C1 |
УСТРОЙСТВО ОРБИТАЛЬНОГО ПЕРЕМЕЩЕНИЯ ПРИ ЭЛЕКТРОЭРОЗИОННОЙ ОБРАБОТКЕ, содержащее сопряженные вал и втулку с равными эксцентриситетами, связывающий их планетарный механизм, привод вращения эксцентриков вала и втулки, а также привод изменения эксцентриситета./ отличающееся тем, что, с целью повыиения точности и производительности , в устройство введена крестовая муфта, одна из полумуфт которой неподвижно соединена с эксцентриковым валом, свободно проходящим через среднее звено муфты и ее вторую полумуфту, выполненную в одном блоке с двумя зубчатыми венцами, один из которых кинематически связан с приводом вращения, при этом кинематическая цепь, связывакхцая привод с эксцентриковой втулкой, выполнена в виде вала с двумя- зубчатыми колесами, одно из которых находится в зацеплении с вторым зубчатым венцом полумуфты, а другое - с центральным коле- о сом планетарного механизма, сателлит ® которого находится в зацеплении с (Л зубчатым венцом эксцентриковой втулки, а ось сателлита кинематически связана с приводом изменения эксцентриситета.