Изобретение относится к измерительной технике и предназначено для стабилизации градуировочной характеристики изм ительного устро.йства (ИУ), Известен способ стабилизации градуировочной характеристики иэмери тельного устройства, заключсШ)1191йся в том, что подают испытательный сигнал, регистрируют исходной сигнал, находят для заданного входного уровня сигнала среднее значение кдходного сигнала, которое затем сравнивают со значением выходного сигнала найденным по номинальной градуировочной характеристике устройства, настраивают устройство до тех пор, пока сравниваемые сигналы не будут равны. В способе Производится регулировка нуля и чувствительности, в результате чего реальная храдуировочная характеристика ИУ поддерживается равной его номинальной градуировочной характеристике. Это позволяет корректировать аддитивные и муль типликативные погрешности ИУ. При регулировке нуля ИУ, на его вход подают нулевой сигнал, и определяют среднее значение выходного сигнала,, Затем это осредненное значен-ие сравнивают со значением выходного сигна ла, которое для данного ИУ соответствует нулевому значению сигнала на его входе, и производят настройку ИУ так, чтобы среднее значение выход ного сигнала соответствовало уровню нуля для данного ИУ. Аналогично производится регулировка чувствител ности ИУ, когда на его вход подают отличный от нуля эталонный сигнал 11 . Однако стабилизация градуировочной характеристики производится тол ко в статическом режиме. При измере нии динамических сигналов градуировочная характеристика ИУ измен яется однако способ не позволяет скоррект ровать это изменение, что приводит к появпению систематических динамических погрешностей ИУ, Наиболее близким к изобретению является способ определения градуировочной характеристики измфительного устройства, заключающийся в том, что на измерительное устройств подают испытательный сигнал, с динс1 мическими характеристиками, близкихк характеристикам изм яемого сигна ла, сравнивают его с заданными уров нями, регистрируют выходной сигнал в моменты равенства входного сигнала заданным уровням, определяют гра дуировочную характеристику устройст ва путем статистической обработки результатов. Известный способ позволяет произвести градуировку устройства в динамическом режиме, и тем caNHM устранить не только систематические статические, но и динамические погрешности Г2. При изменении динамических характеристик сигнала градуировочная характеристика ИУ меняется. Поэтому использование градуировочной характеристики найденной для одного сигнала, при измерении других сигналов будет приводить к появлению погрешностей . Цель изобретения - повышение точности. Поставленная цель достигается тем, что согласно способу определения градуировочной характеристики измерительного устройства, заключающемуся в том, что на измерительное устройство подают испытательный сигнал с динамическими характеристика УШ, близкими к характеристикам измеряемого сигнала, регистрируют выходной сигнал в моменты равенства значений испытательного сигнала заданным уровням, осредняют значения вы-;. ходного сигнала, зарегистрированные для .каждого заданного уровня, предварительно находят для заданных уровней входного сигнала по номинальной градуировочной характеристике значения выходного сигнала, вычитают их из значений выходного сигнал-а, зарегистрированных при соответствующих уровнях входного сигнала, регулируют смещение нуля и коэффициента усиления измерительного устройства до тех пор, пока осредненные значения разностей не будут равны нулю, Введение операции нахождения разностного сигнала на выходе измерительного устройства позволяег определить отклонение градуировочной характеристики измерительного устройства в динамическом режиме от его номингшьной градуировочной характеристики. Введение операции ре;гулировки измерительного устройства из условий минимума этого разностного сигнала позволяет и в динамическом режиме измерения реальную характеристику преобразования устройства поддерживать равной его номинальной з7Е адуировочной характеристики, и тем самым устранять систематические динамические погрешности измерительного устройства, На чертеже представлена блок-схема устройства, реализующего гфедла- . . способ, Устройство сод ержит измерительное устройство 1, сравнивающий блок 2, вычитаю$ций блок 3, масштабный преобразователь 4, задатчик 5 уровня, блок. 6 управления и обработки. Вход измерительного устройства объединен с первым входом сравиивгц щего блока 2, второй вход которого подключен к выходу задатчика 5 уро ня и ко входу масштабного преобраз вателя 4, Выход ИУ 1 подключен к входу галчитающего блока 3, другой вход которого подключен к выходу масштабного преобразователя 4. Выход сравниваюгцего блока 2 и клчи таюцего блока 3 подключены к входа блока б управления и обработки, вы ходы которого подключены к другим входам ИУ 1.На ИУ 1 подают динамический испы тательный сигнал x(t), который может йлть реальным, измеряемым сигналом, либо сигналом, с близкими к нему динамическими характеристиками. В задатчике 5 уровня устанавливают заданный уровень сигнала хе. При коррекции смещения нуля градуи ровОчной- характеристики ИУ выбирают . С помощью масштабного преобразователя 4 реализующего номинальную градуировочную характеристику измеряемого устройства определяют номинальное значение выходного сигнала ИУ 2(, , которое вычитают из значений его кдходного сигнала 2( в вычитёиощем блоке 3. Входной сигнал x{t) непрерывно сравнивают с шлбранным уровнем х,, и гфи их равенстве производят регистрацию разностного сигнала d() с выхода блока 3 в блоке б управления. Регистрацию сигнала а () производят установленное число раз, достаточное для проявления статистических закономерностей. Зарегистрированны значения 4(-fc) осредняют в блоке б. и производят регулировку нуля ИУ так, чтобы свести осреднеМное значение разности к нулю. Таким же образом производят регулировку коэффициента усиления ИУ. При этом уровень сигнала Хд выбирают равным х, где Xfnay: максимальное значение диапазона измерения. Такая коррекция градуировочной характеристик ИУ производится либо перед измерением, либо периодически, в щ оцессе измерения. Тем самым, независимо от характеристик сигнала, градуировочная характеристика ИУ поддерживается постоянной, и равной номинальной градуировочной характеристике ИУ. Использование предлагаемого способа в сравнении с известным обеспечивает возможность стабилизации градуировочной характеристики ИУ в динамическом режиме, и поддержание ее равной номинальной градуировочной характеристике ИУ. Это достигается за счет непрерывного контроля отклонения реальной градуировочной характеристики ИУ от номинальной в динамическом режиме, что обеспечивается операциями выч,1тания из выходного сигнала ИУ номинальных значений ВЫХОДНО1ХЭ сигнала ИУ для защанного уровня входного сигнала, осреднения полученных разностей, и регулировкой уровня нуля и коэффициента усиления ИУ. Таким образом, использование способа позволяет повысить точность измерений в динамическом режиме, так как независимо от изменения характеристик сигнала градуировочная характеристика ИУ остается равной его номинальной градуировочной характеристике.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для градуировки средств измерений | 1985 |
|
SU1275343A1 |
| СПОСОБ КОНТРОЛЯ ПАРАМЕТРОВ ЖИДКИХ СРЕД | 1992 |
|
RU2035733C1 |
| Способ определения градуировочной характеристики измерительного устройства | 1981 |
|
SU960689A1 |
| Способ градуировки информационно-измерительного канала и устройство для его реализации | 1980 |
|
SU871165A1 |
| Способ определения градуировочной характеристики измерительного устройства | 1982 |
|
SU1071983A2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ СТАТИСТИЧЕСКОЙ ПОГРЕШНОСТИ ИЗМЕРИТЕЛЬНЫХ УСТРОЙСТВ | 1990 |
|
RU2024890C1 |
| Устройство аналого-цифрового преобразования | 1981 |
|
SU1012435A1 |
| Кондукционный расходомер | 1982 |
|
SU1064139A2 |
| Способ калибровки погрешностей инерциального измерительного блока на базе лазерных гироскопов с использованием динамического стенда | 2021 |
|
RU2803878C2 |
| СПОСОБ КАЛИБРОВКИ ПАРАМЕТРОВ БЕСПЛАТФОРМЕННОГО ИНЕРЦИАЛЬНОГО ИЗМЕРИТЕЛЬНОГО МОДУЛЯ | 2004 |
|
RU2269813C2 |
СПОСОБ е ПРЕДВЛЕНИЯ ГРАДИРОВОЧНОЙ ХАРАКТЕРИСТИКИ ИЗМЕРИТЕЛЬНОГО УСТРОЙСТВА, заключающийся в том, что на измерительное устройство подают испытательный сигнал с динами-i ческими характеристиками, близкими к характеристикам измеряемого сигнала регистрируют выходной сигнал в моменты равенства значений испытательного сигнала заданным уровням, осредняют значения выходного сигнала, зарегистрированные для кёисдого заданного уровня,, о тличающийся тем, 4TOf с целью поЕБоиения точности, щ едварительно находят для заданных уровней входного сигнала по номинальнс градуировочной хгфактеристике значения выходного сигнала, вычитают их из значений выходного сигна-. ла, зарегистрированных при соответствующих уровнях входного сигнала, регулируют CMeiqsHHe нуля и коэффи д циента усиления измерительного устройства до тех пор, пока осрёдненСЛ ные значения разностей не будут равны нулю.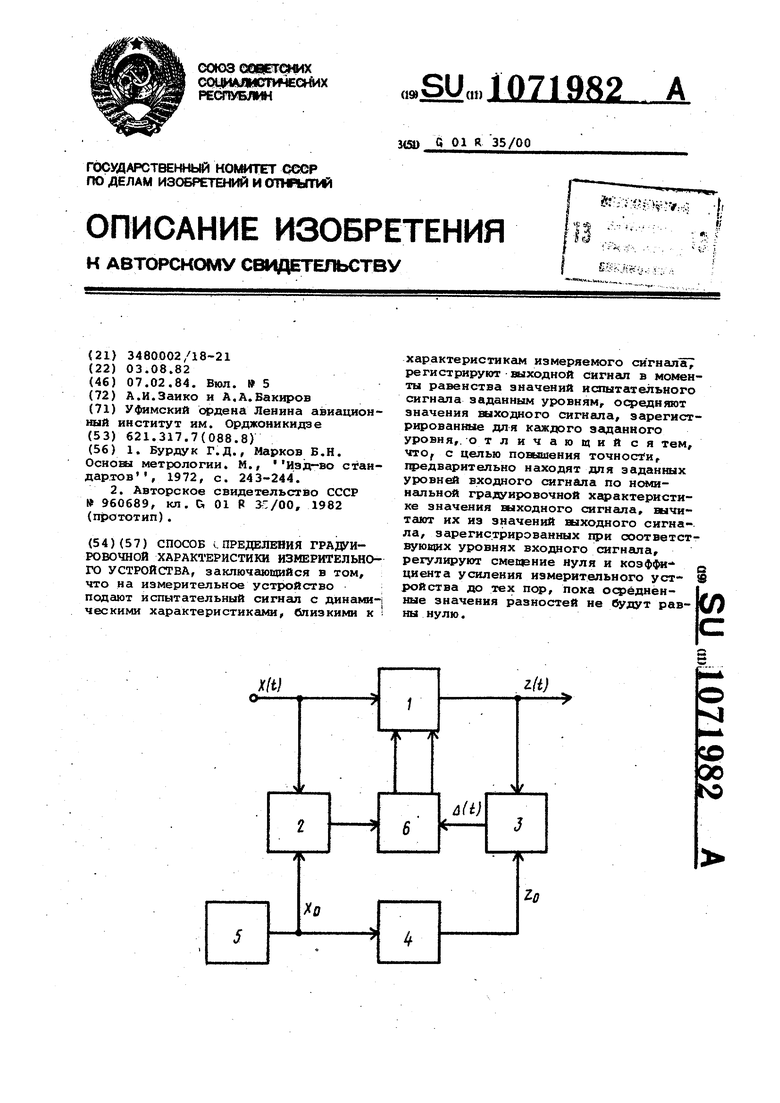
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Бурдук Г.Д., Марков Б.Н | |||
| Основы метрологии | |||
| М., Изд-во стандартов, 1972, с | |||
| Вагонетка для кабельной висячей дороги, переносной радиально вокруг центральной опоры | 1920 |
|
SU243A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ определения градуировочной характеристики измерительного устройства | 1981 |
|
SU960689A1 |
| G, 01 R , 1982 (прототип). | |||
