Изобретение относится к навигационному приборостроению и может быть использовано для оценки систематических и инструментальных погрешностей датчиков первичной информации (ДПИ), входящих в состав инерциального измерительного блока (ИИБ), при проведении калибровочного этапа на динамическом стенде с двумя осями вращения.
Точностные характеристики инерциальных навигационных систем напрямую зависят от качества выходной информации датчиков первичной информации: трех гироскопов и трех акселерометров. Одним из технологических этапов производства навигационных систем является определение параметров модели инструментальных погрешностей инерциальных датчиков по результатам обработки показаний датчиков во время калибровочных процедур. Традиционно в процессе калибровки оцениваются следующие погрешности ДЛИ: смещения нулевых сигналов, погрешности масштабных коэффициентов и неортогональности осей чувствительности. Рассчитанные значения в дальнейшем используются для компенсации измерений ДЛИ.
Известен способ [1] калибровки ИИБ, заключающийся в том, что последовательно проводят съем информации с измерительных датчиков при неподвижном положении и воздействии угловых скоростей в различных положениях при помощи одноосевого поворотного стенда.
Недостатками данного способа являются необходимость использования специализированного кронштейна для выставки каждой оси чувствительности в различные положения, а также большие временные затраты для проведения необходимого объема испытаний и высокая трудоемкость. На результаты измерений большое влияние оказывает человеческий фактор.
Для повышения эффективности и точности калибровки ИИБ в последнее время все чаще используют двухосевые или трехосевые динамические стенды с температурной камерой. Основными достоинствами применения таких стендов является то, что калибровка ДНИ, входящих в состав ИИБ, осуществляется непрерывно без перезакрепления блока во всем температурном диапазоне применения.
Известны способы калибровки ДНИ на динамических стендах [2], [3], [4], которые используют различные подходы к оценке погрешностей гироскопов и акселерометров, но принятые математическая модель и вектор оцениваемых параметров не учитывают зависимость погрешностей масштабных коэффициентов гироскопов и акселерометров от направления входного воздействия. При этом этап калибровки занимает длительное время.
Известен способ определения ошибок ориентации измерительных осей лазерных гироскопов и маятниковых акселерометров в БИНС [5], заключающийся в проведении измерений выходных сигналов блока гироскопов и блока акселерометров при проведении испытаний на двухосном динамическом стенде и цифровой обработке полученных измерений. Предложенное решение позволяет определить только ошибки ориентации измерительных осей гироскопов и маятниковых акселерометров в БИНС, что является недостаточным для определения всех параметров математической модели погрешностей показаний датчиков первичной информации в составе инерциального блока, так как оценка смещения нулевого сигнала лазерных гироскопов и блока акселерометров не проводится.
Задача, на решение которой направлено заявляемое изобретение, заключается в создании способа калибровки ИИБ на двухосном динамическом стенде, позволяющего с высокой точностью определять значения параметров расширенной математической модели ДПИ.
Технический результат заключается в снижении трудоемкости за счет проведения этапа калибровки на двухосном динамическом стенде с температурной камерой и повышении точностных характеристик ИИБ за счет расширения математической модели и исключения человеческого фактора.
Технический результат достигается за счет того, что ИИБ, установленный на двухосном динамическом стенде, совершает изменение ориентации согласно заданному оптимальному профилю вращений в фиксированных температурных точках, при этом вектор оцениваемых параметров наряду с основными погрешностями включает асимметрию погрешностей масштабных коэффициентов гироскопов и акселерометров, которые в дальнейшем учитываются при компенсации.
Структурная модель показаний акселерометров имеет вид:
где  - вектор показаний блока акселерометров;
- вектор показаний блока акселерометров;
 - матрица погрешностей блока (в которой диагональные элементы характеризуют погрешности масштабных коэффициентов, внедиагональные - перекосы осей чувствительности акселерометров). При этом погрешности масштабных коэффициентов зависят от знака входного сигнала акселерометров (ki+ и ki- погрешность масштабного коэффициента при положительном и отрицательном входном сигнале):
- матрица погрешностей блока (в которой диагональные элементы характеризуют погрешности масштабных коэффициентов, внедиагональные - перекосы осей чувствительности акселерометров). При этом погрешности масштабных коэффициентов зависят от знака входного сигнала акселерометров (ki+ и ki- погрешность масштабного коэффициента при положительном и отрицательном входном сигнале):
 - вектор удельной силы, действующей на чувствительную массу акселерометра;
- вектор удельной силы, действующей на чувствительную массу акселерометра;
 - вектор смещений нулевых сигналов акселерометров;
- вектор смещений нулевых сигналов акселерометров;
 - вектор измерительных шумов акселерометров. Структурная модель показаний блока гироскопов имеет вид:
- вектор измерительных шумов акселерометров. Структурная модель показаний блока гироскопов имеет вид:

где  - вектор показаний гироскопов;
- вектор показаний гироскопов;
 - матрица погрешностей блока (в которой диагональные элементы характеризуют погрешности масштабных коэффициентов, внедиагональные - перекосы осей чувствительности гироскопов). При этом ошибки погрешности масштабных коэффициентов зависят от знака входного сигнала акселерометров (mj+ и mj+ погрешность масштабного коэффициента при положительном и отрицательном входном сигнале), то есть, является кусочно-линейной по входу:
- матрица погрешностей блока (в которой диагональные элементы характеризуют погрешности масштабных коэффициентов, внедиагональные - перекосы осей чувствительности гироскопов). При этом ошибки погрешности масштабных коэффициентов зависят от знака входного сигнала акселерометров (mj+ и mj+ погрешность масштабного коэффициента при положительном и отрицательном входном сигнале), то есть, является кусочно-линейной по входу:

 - вектор угловой скорости;
- вектор угловой скорости;
 - систематические смещения показаний гироскопов;
- систематические смещения показаний гироскопов;
 - вектор измерительных шумов гироскопов.
- вектор измерительных шумов гироскопов.
Данный способ реализуют следующим образом.
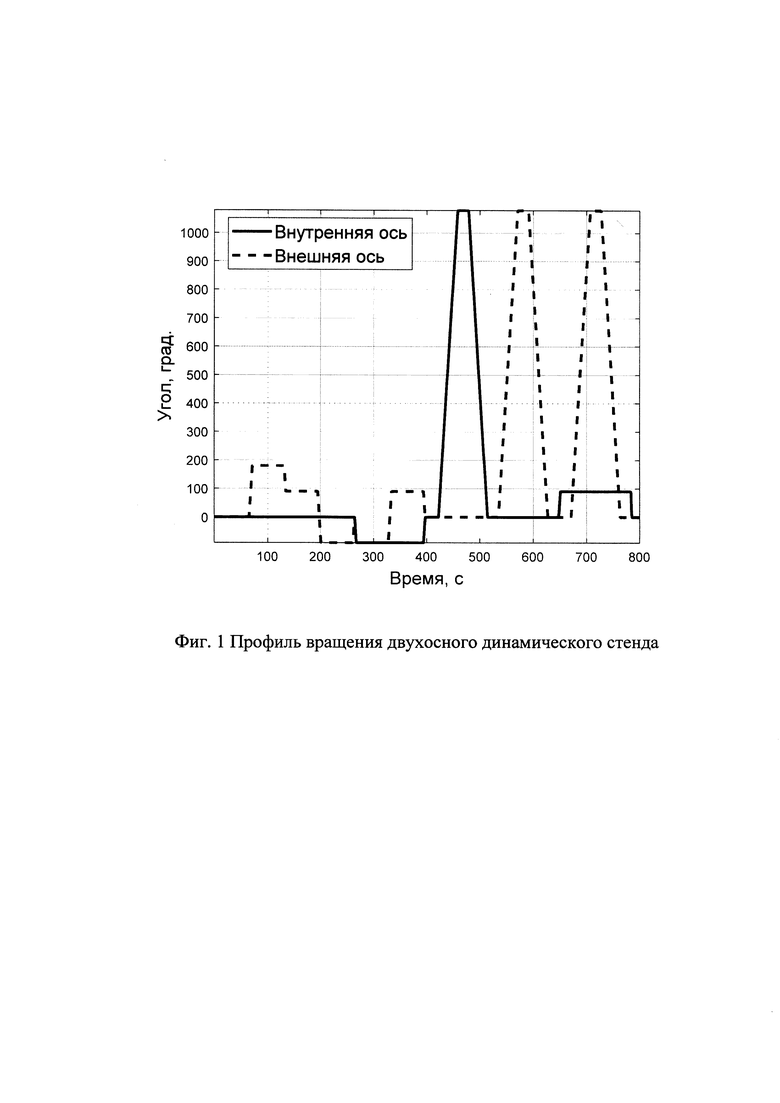
На планшайбу поворотного стола двухосного динамического стенда [6] устанавливают ИИБ таким образом, что вертикальная и продольная приборные оси совпадают с внешней и вертикальной осями стенда. Далее двухосный стенд, согласно предложенному закону изменения угловой ориентации (фиг.1), обеспечивает последовательную выставку блока в статические положения. Одновременно проводится регистрация информации с трех одноосных лазерных гироскопов и трех одноосных акселерометров.
Полученные измерения акселерометров в 6 статических положениях осредняются и формируется матрица S1.
Алгоритм расчета калибровочных констант блока акселерометров следующий:
1. Предварительная оценка нулевых сигналов проводится путем осреднения значений в положениях, когда ось чувствительности ориентируется вдоль вертикали места: 
2. Формирование матриц Г+ (матрица погрешностей блока в случае положительного входного сигнала) и Г- (матрица погрешностей блока в случае отрицательного входного сигнала) проводится с учетом значений предварительно оцененных нулевых сигналов:
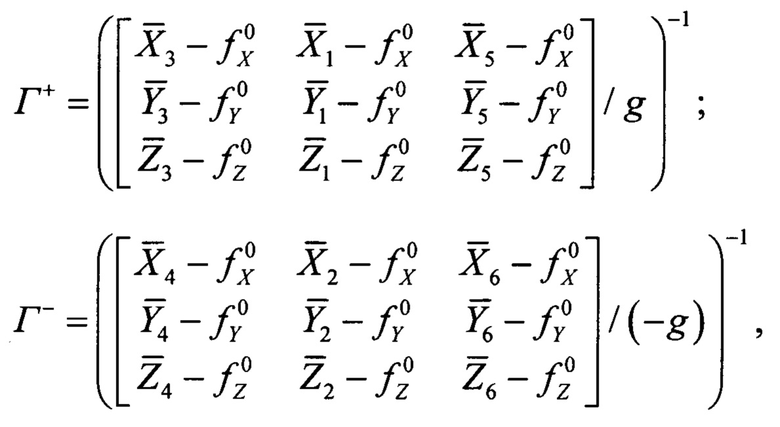
где g - значение удельной силы тяжести.
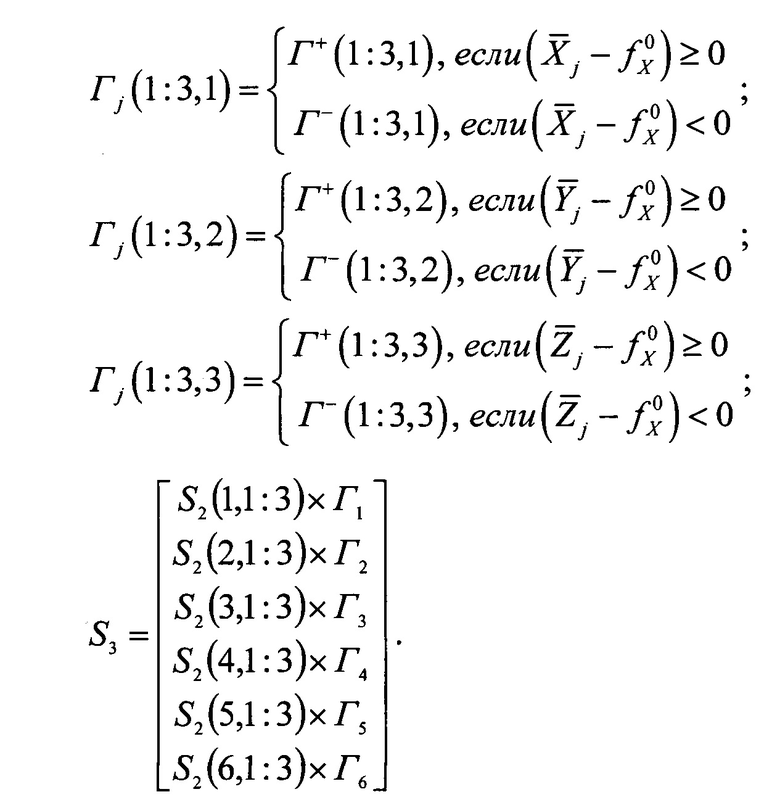
3. Формирование матрицы осредненных значений S2 с учетом рассчитанных нулевых сигналов 
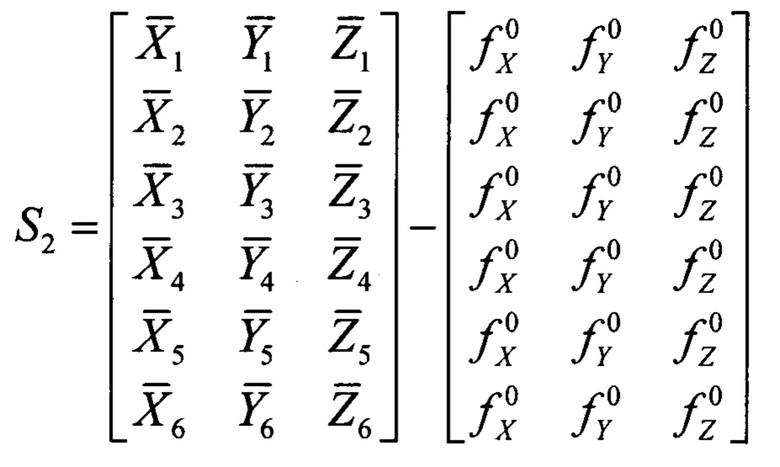
4. Компенсация измерений матрицы осредненных значений S2 с учетом сформированных матриц Гj для каждого статического положения (j=1…6 - номер статического положения):
5. Используя вновь сформированный массив осредненных значений S3, проводится уточнение параметров f0, Г+, Г- по пунктам 1-4 и формируются комбинированные итоговые калибровочные параметры, рассчитанные в результате первой и второй итерации.
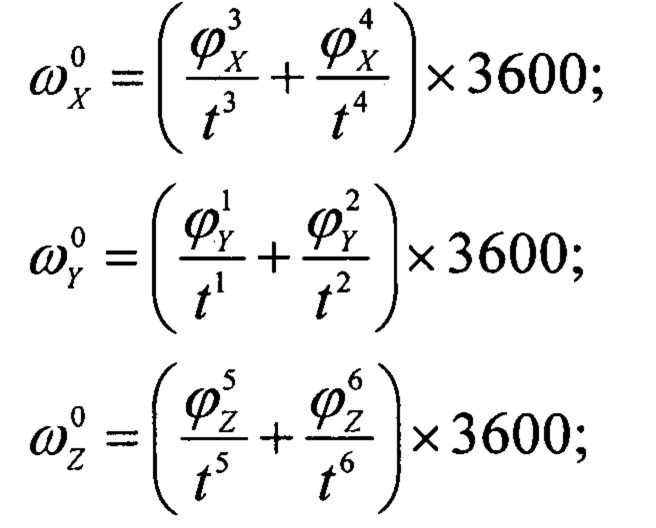
Систематические смещения показаний гироскопов определяются при выставке каждой оси чувствительности в вертикальное положение с учетом информации об угловой скорости вращения Земли.
где
 - систематический дрейф
- систематический дрейф  гироскопа;
гироскопа;
 - накопленный угол
- накопленный угол  гироскопа за время неподвижности
гироскопа за время неподвижности  (j=1…6 - номер статического положения).
(j=1…6 - номер статического положения).
Оценка остальных 12 параметров блока гироскопов (6 погрешностей масштабных коэффициентов и 6 угловых параметров) проводится по измерениям, полученным при повороте на фиксированный угол с заданной угловой скоростью.
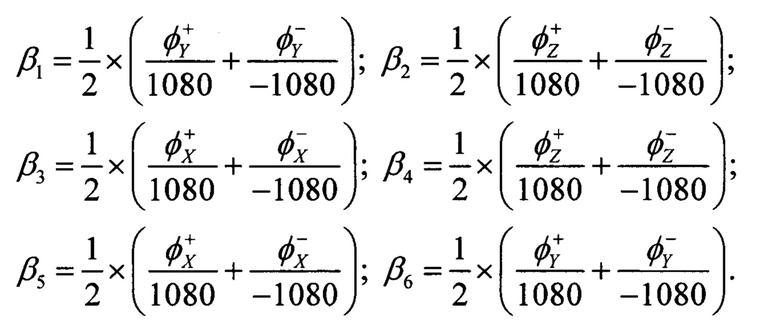
Погрешности масштабных коэффициентов рассчитываются:
где  и
и  - накопленный угол
- накопленный угол  гироскопа, сонаправленного с осью вращения стенда при повороте на положительный и отрицательный угол с учетом вклада систематического дрейфа и проекции угловой скорости вращения Земли, оцененной на участке неподвижности до поворота.
гироскопа, сонаправленного с осью вращения стенда при повороте на положительный и отрицательный угол с учетом вклада систематического дрейфа и проекции угловой скорости вращения Земли, оцененной на участке неподвижности до поворота.
Перекосы осей чувствительности рассчитываются по накопленному углу гироскопа, расположенного ортогонально оси вращения стенда:
Проверка работоспособности и эффективности предложенного способа калибровки основных погрешностей ИИБ с использованием динамического стенда была проведена по результатам натурных испытаний. Полученные результаты позволяют сделать вывод, что затрачиваемое время проведения калибровочных работ в одной температурной точке сократилось в 1,5 раза и составило 14 минут. Точность определения параметров принятой математической модели погрешностей одноосных акселерометров увеличилась, что подтверждается результатами проведения испытаний ИИБ в составе инерциальной навигационной системы на комплексе наземной отработки.
Источники информации
1. Н.Б. Вавилова, Н.А. Парусников, И.Ю. Сазонов. Калибровка бескарданных инерциальных навигационных систем при помощи грубых одностепенных стендов // Современные проблемы математики и механики, Том I. - М.: МГУ, 2009. - С. 212-222
2. Патент РФ №2121134, МПК G01C 25/00, 1998 г.;
3. Заявка на изобретение №98112966, МПК G01 C19/00, G01C 25/00, 1998 г.;
4. Патент РФ №2406973, МПК G01C 25/00, 2010 г.;
5. Патент РФ №2683144, МПК G01C 25/00, 2019 г.;
6. https://gosniias.ru/pages/stends.html#c2300.
Способ калибровки погрешностей инерциального измерительного блока (ИИБ) с использованием динамического стенда может быть использован при проведении технологического этапа калибровки ИИБ на базе лазерных гироскопов. Технический результат данного изобретения заключается в повышении точности за счет расширения вектора калибруемых параметров датчиков первичной информации (ДПИ) с использованием двухстепенного динамического стенда. Для достижения данного результата погрешности масштабных коэффициентов рассчитывают для положительного и отрицательного по знаку входного воздействия. Данное изобретение позволяет оценивать систематические и инструментальные погрешности ДПИ в составе ИИБ, а также позволяет упростить процесс калибровки погрешностей ИИБ за счет автоматизации проведения необходимого объема испытаний на двухосевом динамическом стенде с температурной камерой. 1 ил.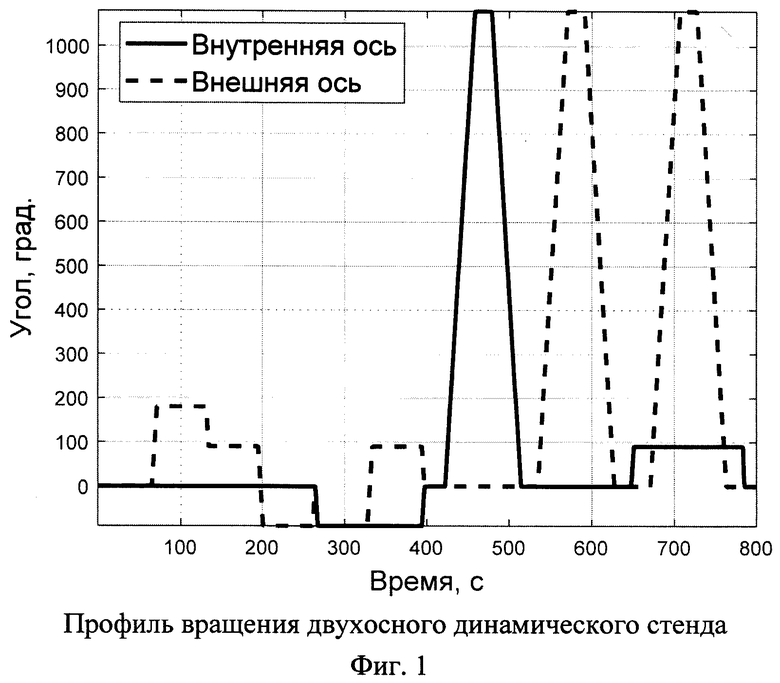
Способ калибровки погрешностей инерциального измерительного блока (ИИБ) на базе лазерных гироскопов, заключающийся в том, что устанавливают на двухосный динамический стенд инерциальный измерительный блок таким образом, чтобы вертикальная и продольная приборная оси совпадали с внешней и вертикальной осями стенда; обеспечивают последовательную выставку блока в статические положения согласно заданному закону изменения угловой ориентации с одновременной регистрацией информации с трёх одноосных лазерных гироскопов и трёх одноосных акселерометров; формируют матрицу измерений акселерометров в шести статических положениях; оценивают нулевые сигналы блока акселерометров путём осреднения значений в положениях, когда ось чувствительности ориентируется вдоль вертикали места; формируют матрицы погрешностей блока акселерометров в случае положительного входного и отрицательного входного сигналов; формируют матрицы осредненных значений с учётом рассчитанных нулевых сигналов; компенсируют измерения матрицы осредненных значений с учётом сформированных матриц погрешностей блока акселерометров в случае положительного входного и отрицательного входного сигналов для каждого статического положения; уточняют параметры оценки нулевых сигналов, а также матриц погрешностей блока акселерометров в случае положительного входного и отрицательного входного сигналов; формируют комбинированные итоговые калибровочные параметры, рассчитанные в результате первой и второй итерации; оценивают параметры блока гироскопов по результатам измерений, полученным при повороте стенда на фиксированный угол с заданной угловой скоростью.
| СПОСОБ КАЛИБРОВКИ ГИРОСКОПОВ | 1997 |
|
RU2121134C1 |
| СПОСОБ КАЛИБРОВКИ БЕСПЛАТФОРМЕННЫХ ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ | 2009 |
|
RU2406973C2 |
| CN 111089606 A, 01.05.2020 | |||
| CN 103090867 A, 08.05.2013 | |||
| US 20070245800 A1, 25.10.2007. | |||

