Изобретение относится к электротехнике и может быть использовано при создании электроприводов с асинхронным электродвигателем, питаемым от источника электроэнергии через управляемый коммутатор, позволяющий осуществить детерминированную коммутацию обмотки статора в процессе импульсного регулирования в заданном диапазоне частоты вращения ротора, для механизмов со спокойным характером нагрузки и значительными маховыми массами, например, сепараторы, центрифуги и др.
Известен способ и.мпульсного регулирования частоты вращения асинхронного привода, электродвигатель которого питают от источника электроэнергии через тиристорный коммутатор,, при котором осуществляют детерминированную коммутацию обмоток статора в два этапа. На первом этапе .определяют две фазы источника электроэнергии, между которыми напряжение максимально, подключают его к двум обмоткс1М статора, на втором этапе через двенадцатую часть периода подключают -.напряжение питания к третьей обмотке статора Cl3.
Недостатком данного способа явля ется отсутствие-, контроля ЭДС наведенной в обмотках статора затухающим -полем короткозамкнутого ротора, отключенного от источника электроэнергии электродвигателя,что. приводит к значительным динамическим перегрузкам при повторных включениях
Наиболее близким к предлагаемому по технической сущности и достигаемому результату является способ импульсного регулирования частоты вра щения асинхронного электропривода, при котором контролируют частоту вращения электродвигателя, а также .соотнсяпение по фазе между напряжениями питания и ЭДС наводиких затухающим полем ротора в обмотках статора, при достижении верхней границы диапазона регулирования частоты вращения отключазат напряжения питания с вьщержкой времени, определяемой достижением заданного соотношения по фазе между напряжениями питания и ЭДС наводимым затухающим полем ротора в обмотках статора С2.
Недостатком известного способа является низкая экономичность, обусловленная одновременной ксвлмутацией обмоток статора после выдержки времени, что повышает динамические перегрузки, приводящие к повыгиенному износу и сокращению срока службы обо рудования как электропривода, так и приводного механизма.
Цель изобретения - повышение эконс ичности за счет снижения динамических перегрузок в электроприводе.
, Указанная цель достигается тем, что согласно способу импульсно-. го регулирования .частоты вращения асинхронного электропривода, при котором контролируют частоту вращения электродвигателя, а также соотношение по фазе между напряжениями питания и ЭДС наводимых затухающим полем ротора в обмотках статора, при достижении верхней границы диапазона регулирования частоты вращения отключают напряжения питания, при достижении нижней границы диапазона регулирования частоты вращения подключают напряжения питания с выдержкой времени, определяемой дости..-;ёнием заданного соотноношения по фазе между напряжениями питания и ЭДС наводимой затухающим полем ротора в обмотках статора, указанную выдержку времени осуществляют в два этапа, при этом на первом этапе выдержки времени определяют две обмотки статора, в которых наведены наибольшие ЭДС совпадающие по знаку с напряжениями сети определяют две фазы источника питания, между которыми напряжение максимально, и подключают это напряжение на указанные обмотки статора с соблюдением заданного порядка чередования фаэ, после чего на втором этапе выдержки .времени, длящемся четверть периода напряжения питания, подключают напряжение питания к третьей обмотке статора.
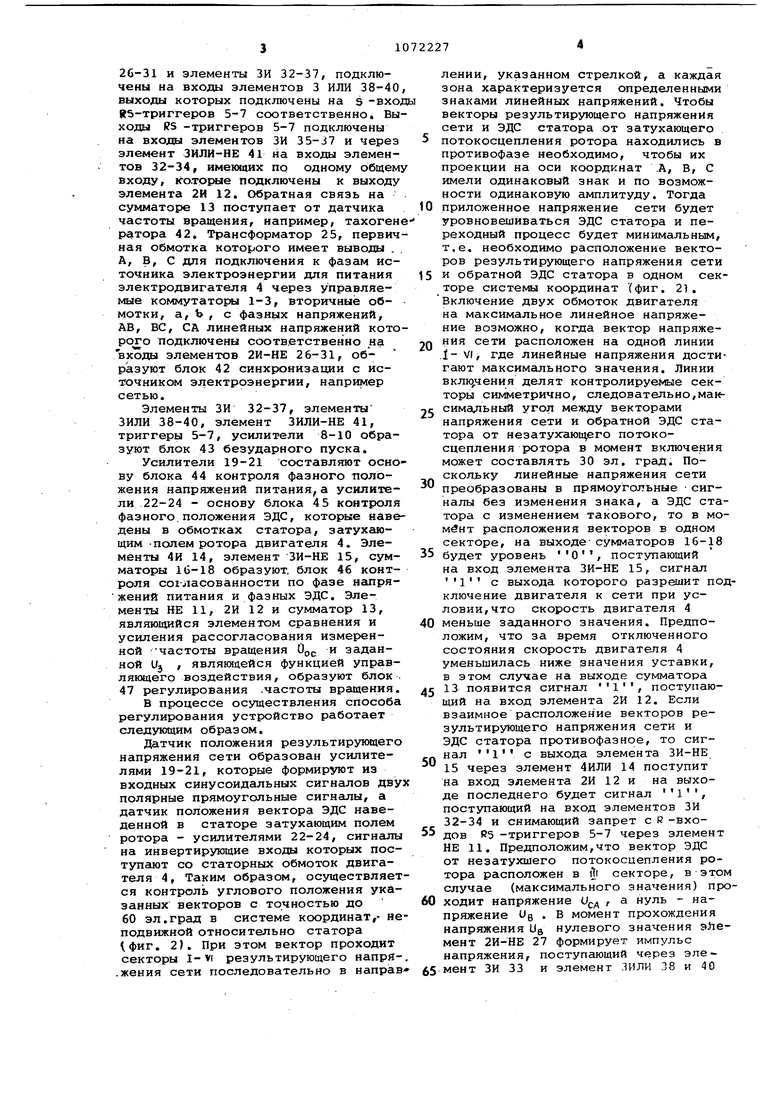
На фиг, 1 представлена функциональная схема одного из вариантов устройства для осуществления способа импульсного регулирования частоты вращения асинхронного электропривода; на фиг. 2 - диаграмма фазового состояния коммутации обмоток статора.
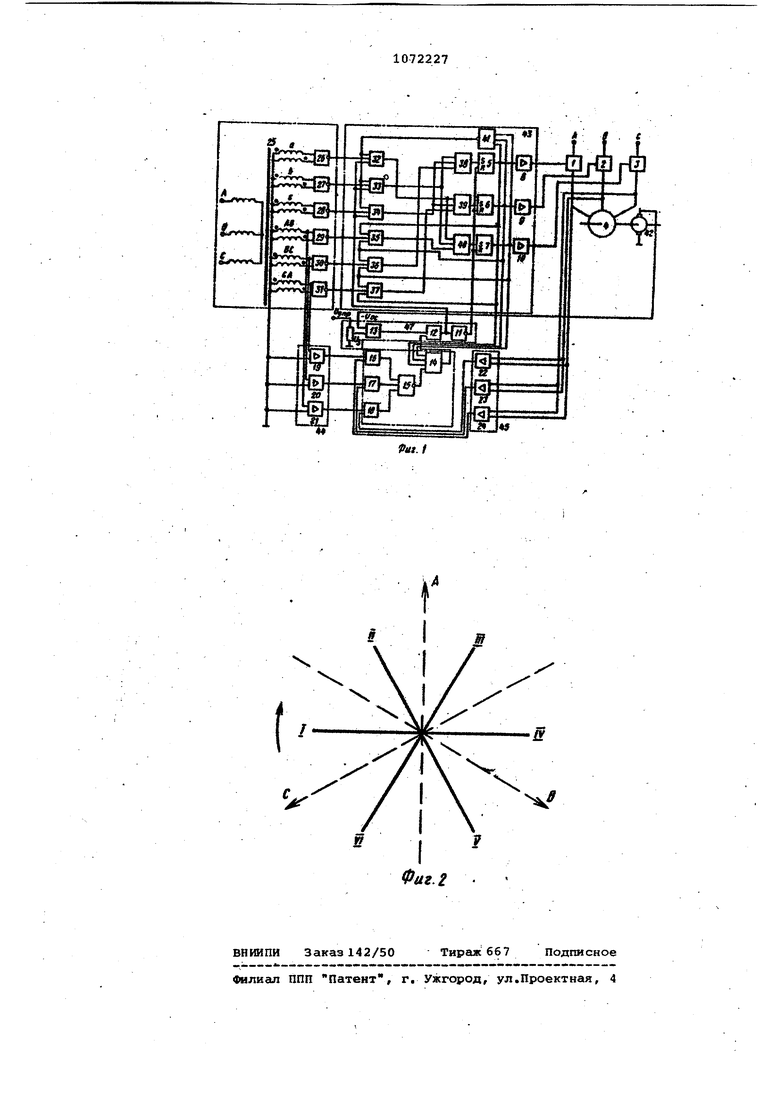
Устройство для осуществления спо соба содержит тиристорные коммутаторы 1-3, включенные в фазы статора асинхронного двигателя 4, управление которьми осуществляется R5 -триггерами 5-7, выходы которых через усилители 8-10 подключены на входы соответствующих тиристорных коммутаторов 1-3, Р-входы триггеров 5-7 oбiъeдинeны и через элемент НЕ 11 подключены к выходу элемента 2И 12, на один вход которого подключен сумматор 13 сигналов задания и обратной связи по частоте вращения, а на второй вход - через элемент 4ИЛИ 14 подключен выход элемента ЗИ-НЕ 15, вход которого через сумматоры 16-18 подключены к выходам усилителей 19-21 и к выходам усилителей 22-24, подключенных к статорной обмотке двигателя 4. Напряжения с вторичных обмоток трансформатора 25 синхронизации, имеющих средние точки, через последовательно соединенные элементы 2И-НЕ 26-31 и элементы ЗИ 32-37, подключены на входы элементов 3 ИЛИ 38-40 выходы которых подключены на s -вхо й5-триггеров 5-7 соответственно. Вы ходы RS -триггеров 5-7 подключены на входы элементов ЗИ 35-J7 и через элемент ЗИЛИ-НЕ 41 на входы элементов 32-34, имеющих по одному общем входу, которые подключены к выходу элемента 2И 12. Обратная связь на сумматоре 13 поступает от датчика частоты вращения, например, TaxoreH ритора 42. Трансформатор 25, первич ная обмотка которого имеет выводы А, В, С для подключения к фазам источника электроэнергии для питания электродвигателя 4 через управляемые коммутаторы 1-3, вторичные обмотки, а, Ь, с фазных напряжений, АВ, ВС, СА линейных напряжений кото подключены соответственно на входы элементов 2И-НЕ 26-31, образуют блок 42 синхронизации с источником электроэнергии, например сетью. Элементы ЗИ 32-37, элементы ЗИЛИ 38-40, элемент ЗИЛИ-НЕ 41, триггеры 5-7, усилители 8-10 образуют блок 43 безударного пуска. Усилители 19-21 составляют осно ву блока 44 контроля фазного тюложения напряжений питания,а усилители 22-24 - основу блока 45 контроля фазного.положения ЭДС, которые наве дены в обмотках статора, затухающим -полем ротора двигателя 4, Элементы 4И 14, элемент ЗИ-НЕ 15, сумматоры 16-18 образуют, блок 46 контроля согласованности по фазе напряжений питания и фазных ЭДС. Элементы НЕ 11, 2И 12 и сумматор 13, являющийся элементом сравнения и усиления рассогласования измеренной ; частоты вращения 0(,с и заданной Uj , являкнцейся функцией управляющего воздействия, образуют блок 47 регулирования .частоты вращения. В процессе осуществления способа регулирования устройство работает следующим образом. Датчик положения результирующего напряжения сети образован усилителями 19-21, которые формируют из входных синусоидальных сигналов дву полярные прямоугольные сигналы, а датчик положения вектора ЭДС наведенной в статоре затухающим полем ротора - усилителями 22-24, сигналы на инвертирующие входы которых поступают со статорных обмоток двигателя 4, Таким образом, осуществляет ся контроль углового положения указанных векторов с точностью до 60 эл.град в системе координат,- не подвижной относительно статора ,фиг. 2). При этом вектор проходит секторы 1-VI результирующего напря.жения сети последовательно в направ лении, указанном стрелкой, а каждая зона характеризуется определенными знаками линейных напряжений. Чтобы векторы результирующего напряжения сети и ЭДС статора от затухающего потокосцепления ротора находились в противофазе необходимо, чтобы их проекции на оси координат .А, В, С имели одинаковый знак и по возможности одинаковую амплитуду. Тогда приложенное напряжение сети будет уровновешиваться ЭДС статора и переходный процесс будет минимальным, т.е. необходимо расположение векторов результирующего напряжения сети и обратной ЭДС статора в одном секторе системы координат (фиг. 21. Включение двух обмоток двигателя на максимальное линейное напряжение возможно, когда вектор напряжения сети расположен на одной линии .1- VI, где линейные напряжения достигают максимального значения. Линии вклю,чения делят контролируемые секторы симметрично, следовательно,максимальный угол между векторами напряжения сети и обратной ЭДС статора от незатухающего потокосцепления ротора в момент включения может составлять 30 эл. . Поскольку линейные напряжения сети преобразованы в прямоугольные сигналы без изменения знака, а ЭДС статора с изменением такового, то в момйнт расположения векторов в одном секторе, на выходесумматоров 16-18 будет уровень О, поступающий на вход элемента ЗИ-НЕ 15, сигнал с выхода которого разрешит подключение двигателя к сети при условии, что скорость двигателя 4 меньше заданного значения. Предположим, что за время отключенного состояния скорость двигателя 4 уменьшилась ниже значения уставки, в этом случае на выходе сумматора 13 появится сигнал 1 , поступающий на вход элемента 2И 12. Если взаимное расположение векторов результирующего напряжения сети и ЭДС статора противофазное, то сигнал Ч с выхода элемента ЗИ-НЕ 15 через элемент 4ИЛИ 14 поступит на вход элемента 2И 12 и на выходе последнего будет сигнал , поступающий на вход элементов ЗИ 32-34 и снимающий запрет с R-входов R5 -триггеров 5-7 через элемент НЕ 11. Предположим,что вектор ЭДС от незатухшего потокосцепления ротора расположен в fli секторе, в этом случае (максимального значения) проходит напряжение (Jj- , а нуль - напряжение Ug . В момент прохождения напряжения Ug нулевого значения эЛемент 2И-НЕ 27 формирует импульс напряжения, поступающий через элемент ЗИ 33 и элемент ЗИЛИ 38 и 40
на S, -вхрды ffS -триггеров 5 и 7. Это возможно, так как на третьем входе элемента ЗИ 33 присутствует
с выхода элемента
сигнал
ЗИЛИ-НЕ 41, подключенного на входы . RS -триггеров 5-7. Происходит
1
установка сигналов
на выходах RS -триггеров 5 и 7, которые через усилители 8 и 10 включаюттиристорные ксялмутаторы 1 и 3 в .фазах А и С, асинхронно1 о двигателя и через элемент ЗИЛИ-НЕ 41 осуществят блокировку прохождения импульсов напряжения с выходов элементов ЗИ 32-34. Через 30 эл.град. после, прохождения напряжения U нулевого значения положение нуля проходит напряжение и элемент 2И-НЕ 29 формирует импульс напряжения, но на одном из входов элемента ЗИ 35 присутствует сигнал .О с выхода RS-триггера б и прохождение сигнала через элемент ЗИ 35 невозможно. Через 60 эл.град. нуль проходит напряжение Уд V но элемент ЗИ 32 заблокирован -сигналом О с выхода элемента ЗИЛИ-НБ 41. Через 90 эл.гр нуль проходит линейное напряжение и импульс напряжения с выхода элемента 2И-НЕ 31 через элементы ЗИ 37 и ЗИЛИ 39 пропускает на 9Г вход R5 -триггера б, устанавливая йа его выходе сигнал 1 , который усилитель 9 включает тиристорный коммутатор 2 в фазе В двигателя 4. Чтобы не произсшло отклю- , чейия двигателя 4 при работе в двухфазном режиме предусмот ена блокировка подклйзчёнием выходов RS-триггеров 5-7 на входы элемента 4ЙЛИ 14, при этом включение одного
из тиристорных коммутаторов 1-3 устанавливает на выходе элемента 4ИЛИ 14 уровень «Ч независимо от изменения положения векторов результирующего напряжения сети и ЭДС статора. Отключение двигателя 4 прЬисхоД1Гт, когда скорость двигателя; 4 превысит значение уставки. При этом на выходе сумматора 13 устанавливается уровень О, а на выходе элемента 2И 12 сигнал Ч с выхода элемента НЕ 11 переводит триггеры 5-7 в нулевое состояние, тиристорные коммутаторы 1-3 закрываются и напряжение питания на двигатель 4 не подается, происходит останов двигателя 4 под действием статического мсмента, далее процесс повторяется Таким образом, осуществляется импульсное регулирование частоты вращения асинхронного двигателя при подключении двух обмоток двигателя к питающей сети в максимуме линейного напряжения с последующим подключением третьей обмотки через 90 эл.град. с соблюдением условия противо$азности векторов результирующего напряжения сети и ЭДС статора от незатухшего магнитного потока роггора.
Предлагаемый способ импульсного регулирования частоты вращения обеспечивает уменьшение динамических перегрузок за счет исключения апериодических составлякщих результирующего электромагнитного момента, благодаря чему снижается потребление электроэнергии, увеличивается срок службы и улучшаются энергетические показатели электропривода.

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления асинхронным электроприводом с тиристорным коммутатором | 1988 |
|
SU1582322A1 |
| Способ регулирования частоты вращения трехфазного асинхронного электродвигателя | 1985 |
|
SU1376209A1 |
| Устройство для векторно-импульсного управления асинхронным электроприводом | 1975 |
|
SU600681A1 |
| Способ параметрического управления асинхронным короткозамкнутым электродвигателем с вентиляторной нагрузкой и устройство для его осуществления | 1989 |
|
SU1697250A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1984 |
|
SU1192094A1 |
| Частотно-регулируемый электропривод с многовентильным непосредственным преобразователем частоты | 1990 |
|
SU1830610A1 |
| Устройство для управления двигателем двойного питания | 2016 |
|
RU2625720C1 |
| Электропривод | 1985 |
|
SU1354380A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2006 |
|
RU2320073C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
СПОСОБ «ИМПУЛЬСНОГО РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ АСИНХРОННОГО ЭЛЕКТРОПРИВОДА, при котором контролируют частоту вращения электродвигателя, а также соотношение по фазе между напряжениями питания и ЭДС наводимых затухакяцим полем ротора в обмотках статора, при достижении верхней границы диапазона регу.лирования частоты вращения отключают напряжения питания, при достижении нижней границы диапазона регулирования : частоты вращения подключают нагпряжёнйя питания с выдержкой времени, определяемой достижением задан- ного соотношения по фазе между напряжениями питания и ЭДС наводимой затухающим полем ротора в обмотках статора о и ч а ю щ и и с я тем, что, с целью повьвиения экономичности за счет снижения дкнсцлйческих jtreperpy- . зок, указанную выдержку времени-осу ществляют в два зтапа, при этом на первс этапе выдержки времени определяют две обмотки статора, в которых наведены наибольшие ЭДС,совпаданлцие по знаку с напряжениями сети, определяют дае фазы источника питания, между которыми напряжение максимально, и подключают это напряже ние на указанные обмотки статора с сл соблюдением заданного порядка чередования фаз, после чего на втором этапе выпержКи времени, длящемся четверть периода напряжения питания, .подключают напряжение питания к третьей обмотке статора. tsD tsd to 
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР № 904160, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для векторно-импульсного управления асинхронным электроприводом | 1975 |
|
SU600681A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
