Изобретение относится к электротехнике и может быть использовано в электроприводах переменного тока общепромышленных механизмов.
Целью изобретения является повышение экономичности.
Способ управления асинхронным электроприводом с тиристорным коммутатором в фазах статора электродвигателя состоит в следующем.
Формируют трехфазную симметричную систему модулирующих напряжений с тем же порядком чередования фаз, что и у источника электроэнергии, с частотой, соответствующей заданной угловой скорости вращения ротора электродвигателя.- Сравнивают полярности фазных напряжений источника электроэнергии с полярностями модулирующих напряжений для каждой фазы в отдельности и определяют интервалы времени, в которых совпадают полярности указанных напряжений во всех трех фазах. В течение
ю оэ
ГчЭ
ю
указанных интервалов времени определяют две фазы источника электроэнергии, между которыми напряжение максимально, и подают сигналы управления на тиристоры коммутаторов в этих фазах, а затем через четверть периода напряжения питания подают сигналы управления на тиристоры коммутатора в третьей фазе. Контролируют токи в фазах статора и для диапазона частот вращения из - (0,5-1,0)юв формируют сигнал на отключение ти- ристормых коммутаторов после перехода токов в двух фазах статора через нулевое значение, для диапазона частот вращения w (0,3-0,5) сигнал на отключение тиристорных коммутаторов- формируют после перехода тока в одной из фаз статора через нулевое значение, а для диапазона частот вращения си (0,2-0,5)uie сигнал на отключение тиристорных коммутаторов формируют после появления тока в третьей фазе статора, где tu0 - синхронная частота вращения
лектродвигателя.
На фиг. 1 показана структурная хема устройства, реализующего даный способ управления у на фиг. 2-4 - римеры реализации блока отключения сигналов управления.
Устройство для осуществления способа управления асинхронным электроприводом содержит тиристорные коммутаторы 1-3, включенные в фазы статора асинхронного электродвигателя 4, управление которыми осуществляется RS-триггерами 5-7, выходы которых подключены к входам соответствующих тиристорных коммутаторов 1-3, трансформатор 8 синхронизации,, первичные обмотки которого подключены к зажимам фаз А, В, С источника электроэнергии, а вторичные обмотки имеют заземленные средние точки и через последовательно соединенные соответствующие элементы 2И-НЕ 9-14 и элементы ЗИ 15-2О подключены на входы элементов ЗИЛИ 21-23, выходы которых подключены на S-входы RS-триггероб 5-7 соответственно. Выходы RS-триг- геров 5-7 через элемент ЗИЛИ-НЕ 24 подключены к вторым входам элементов ЗИ 15-17, третьи входы которых объ
в
10
15
5823224
и третьему входу элемента ЗИ 18. RS-триггер 7 выходом подключен к третьим входам элементов ЗИ 19 и 20. Вторичные обмотки а, Ь, с фазных напряжений и обмотки АВ, ВС, СА линейных напряжений трансформатора 8 синхронизации подключены на входы элементов 2И-НЕ 9-14 соответственно. К обмоткам фазных напряжений а, Ь, с подключены входы формирователей 26- 28 импульсов, выходы которых подключены к первым входам элементов ЭКВИВАЛЕНТНОСТЬ 29-31 соответственно, другие входы которых соединены с выходами генератора 32 модулирующих напряжений, к входу которого подключен блок 33 задания. В фазы статора электродвигателя 4 включены датчики 34-36 тока, выходы которых подключены к входам блока 37 отключения сигналов управления, четвертый вход которого подключен к выходу элемента ЗИ 25, а выход соединен с R-входами RS-триггеров 5-7.
В процессе осуществления способа управления асинхронным электроприводом устройство работает следующим образом,
В соответствии с уставкой блока 33 задания генератор 32 модулирующих напряжений формирует трехфазную систему напряжений, которые, как и фазные напряжения источника электроэнергии
20
25
30
35
40
, преобразуются в сигналы, в которых 1 соответствует положительному значению напряжения, а О - отрицательному значению напряжения. С помощью схем ЭКВИВАЛЕНТНОСТЬ 29-31 осуществляется пофазное сравнение полярности напряжений источника электроэнергии и генератора 32 и при их совпадении во всех трех фазах 1 с выхода элемента ЗИ 25, поступая на входы элементов ЗИ 15-17, разрешает поступление синхронизирующих импульсов с выходов элементов 2И-НЕ 9-11 на S-входы RS-триггеров 5-7. Синхронизирующие импульсы генерируются элементами 2И-НЕ 9-11 в моменты прохож- 50 дения фазными напряжениями а, Ь, с нулевого значения, а также элементами 2И-НЕ 12-14 в моменты прохождения линейными напряжениями АВ, ВС, СА нулевого значения. Предположим, что
45



| название | год | авторы | номер документа |
|---|---|---|---|
| Способ импульсного регулирования частоты вращения асинхронного электропривода | 1982 |
|
SU1072227A1 |
| Способ регулирования частоты вращения трехфазного асинхронного электродвигателя | 1985 |
|
SU1376209A1 |
| Многодвигательный электропривод переменного тока | 1985 |
|
SU1307521A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1984 |
|
SU1192094A1 |
| Частотный электропривод | 1988 |
|
SU1658354A1 |
| Электропривод переменного тока | 1988 |
|
SU1610590A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1988 |
|
SU1721777A1 |
| Устройство для импульсного регулирования частоты вращения асинхронного электродвигателя | 1982 |
|
SU1072226A1 |
| Устройство для моделирования вентильного преобразователя | 1981 |
|
SU968829A1 |
| Устройство управления процессом электроосаждения | 1989 |
|
SU1654385A1 |

Изобретение относится к электротехнике и может быть использовано в электроприводах переменнго тока общепромышленных механизмов. Целью изобретения является повышение экономичности. Способ управления асинхронным электроприводом состоит в следующем. Формируют трехфазную систему модулирующих напряжений, частота которой соответствует заданной частоте вращения электродвигателя, сравнивают полярности фазных напряжений источника электроэнергии с полярностями модулирующих напряжений в каждой фазе и при совпадении во всех трех фазах определяют две фазы источника электроэнергии, между которыми напряжение максимально, и подают сигналы управления на тиристоры коммутаторов в этих фазах. Затем через четверть периода напряжения питания подают сигналы управления на тиристоры коммутатора в третьей фазе, контролируют токи в фазах статора и для частот вращения ω = (0,2-0,5)ω 0 после появления тока в третьей фазе сигналы управления на всех тиристорах коммутаторов отключаются, далее тиристоры запираются путем естественной коммутации. Для частот вращения ω = (0,3-0,5)ω и ω = (0,1-1,0)ω 0 отключение сигналов управления тиристорами осуществляют соотвественно после перехода через нулевое значение тока в одной из фаз или в двух фазах. 4 ил.
единены и подключены к выходу элемен--,5 напряжение проходит нулевое зната ЗИ 25. RS-триггер 5 выходом подключен к вторым входам элементов ЗИ 18 и 20. RS-триггер 6 выходом подключен к второму входу элемента ЗИ 19
чение, тогда импульс напряжения с вы хода элемента 2И-НЕ 9 через элемент ЗИ 15 и элементы ЗИЛИ 22 и 23 поступит на S-входы RS-триггеров 6 и 7,
чение, тогда импульс напряжения с выхода элемента 2И-НЕ 9 через элемент ЗИ 15 и элементы ЗИЛИ 22 и 23 поступит на S-входы RS-триггеров 6 и 7,
переведет их в состояние с сигналами 1 ка выходах, чем обеспечится включение тиристорных коммутаторов 2 и 3 в фазах В и С асинхронного электродвигателя 4 в момент амплитуды линейного напряжения UBC. В этот же момен времени сигнал на выходе элемента ЗИЛИ-НЕ 24 станет равным нулю и блокирует прохождение импульсов через элементы ЗИ 15-17, а сигналы с выходов RS-триггеров 6 и 7, поступая на входы элемента ЗИ 19, подготовят его к пропусканию импульса с выхода элемента 2И-НЕ 13 в момент прохождения через нуль напряжения UpC. Через четверть периода напряжения питания (через 90 эл.град.), когда напряжение U6C проходит нулевое значение, а напряжение Ua проходит максимум, элемент 2И-НЕ 13 формирует сигнал, поступающий через элементы ЗИ 19 и ЗИЛИ 21 на S-вход КЗ-триггера 5, устанавливает на его выходе сигнал 1, который включает тиристорный коммутатор 1 в фазе А электродвигателя 4. Реализация способа управления асинхронным электроприводом требует контроля тока в фазах статора электродвигателя 4, при этом величина тока контролируется дискретно: если ток в фазе статора равен нулю, выходной сигнал датчика тока представляет О, если же мгновенное значение тока в фазе отлично от нуля, выходной сигнал датчики тока 1. Включение коммутатора 1 переводит электродвигатель 4 в симметричный трехфазный режим и при появлении тока в третьей фазе (фаза А) выходной сигнал датчика 34 тока, представляющий 1, посту- 40 ристорными коммутаторами 1-3 сразу
пает на вход блока 37 отключения сигналов управления.
Для управления двигателем 4 в диапазоне частот ш (0,2-0,З) блок 37 отключения сигналов управления может быть образован элементами ЗИ 38 и 4ИЛИ-НЕ 39, входы которых попарно объединены и подключены к выходам датчиков 34-36 тока, а четвертый вход элемента 4ИЛИ-НЕ 39 подключен к выходу элемента ЗИ 25 и S-входу RS- триггера 40, R-вход которого подключен к выходу элемента 4ИЛИ-НЕ 39, а выход - к одному из входов элемента 2И 41, второй вход которого подключен к выходу элемента ЗИ 38, а выход является выходом блока 37 и подключен к R-входам RS-триггеров 5-7 (фиг.2). В этом случае при совпадении поляр
0
ностей модулирующих напряжении и напряжений источника электроэнергии во всех трех фазах 1 с выхода элемента ЗИ 25 переводит RS-триггер 40 в состоянии с сигналом 1 на выходе. После подключения третьей фазы выходные сигналы датчиков 34-36 тока принимают значения, равные 1, и сигнал Г с выхода элемента ЗИ 38 через элемент 2И 41 поступает на выход блока 37 отключения сигналов управления и переводит RS-триггеры 5-7 в состояние с уровнем О на выходе, что в дальнейтям обеспечивает запирание тирис горных коммутаторов 1-3 путем естественной коммутации. Примерно через 60 эл.град. после подключения коммутатора 1 ток в фазе С проходит нулевое значение и при отсутствии сигналов управления на тиристорных коммутаторах 1-3 происходит отключение фазы С электродвигателя 4 от источника электроэнергии. 5 Отключение фаз А и В происходит при снижении тока в этих фазах до нуля путем естественной коммутации. Исходное состояние блока 37 отключения сигнапов управления - О на выходе RS-триггера чО - будет установлено сигналом 1 с выхода элемента 4ИЛИ-НЕ 39 при отсутствии токов в фазах и сигнале О на выходе элемента ЗИ 25. Описанный цикл подключения повторяется.
При частотах вращения со (0,3-0,5) предусматривается работа электродвигателя 4 в трехфазном режиме в течение примерно 120 эл.град. и отключение сигналов управления ти0
5
после того, как ток в одной из фаз перейдет нулевое значение. В этом случае блок 37 отключения сигналов управления может быть образован
(фиг.З) элементами ЗИ 42 и ЗИ-НЕ 43, входы которых попарно объединены и подключены к выходам датчиков 34-36 тока, RS-триггером 44, S-вход которого подключен к выходу элемента
ЗИ 25 и одному из входов элемента 4ИЛИ-НЕ 45, другие входы которого объединены с входами элемента ЗИ 42, а выход элемента 4ИЛИ-НЕ 45 подключен к R-входам RS-триггеров 44 и 46,
S-вхоД последнего подключен к выходу элемента ЗИ 42. Выходы RS-триггеров 44 и 46, а также элемента ЗИ-НЕ 43 через элемент ЗИ 47 подключены к R-входам RS-триггеров 5-7. При этом
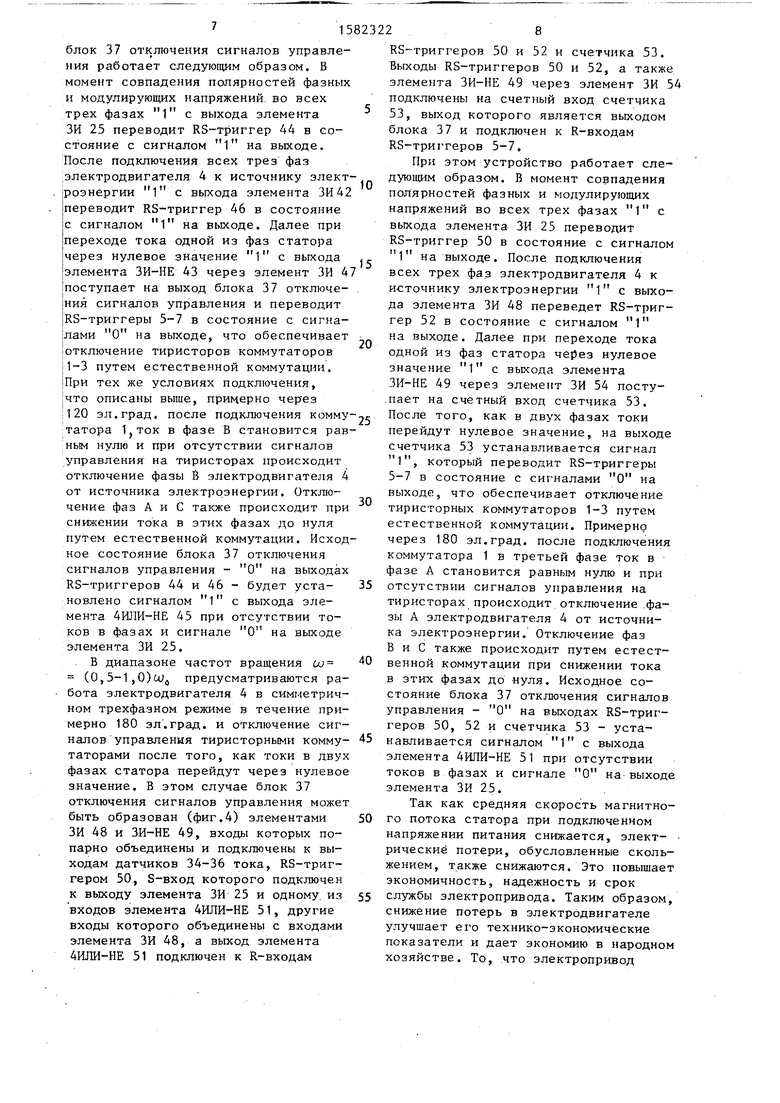
блок 37 отключения сигналов управления работает следующим образом. В момент совпадения полярностей фазных и модулирующих напряжений во всех трех фазах 1 с выхода элемента ЗИ 25 переводит RS-триггер 44 в состояние с сигналом 1 на выходе. После подключения всех трез фаз электродвигателя 4 к источнику электроэнергии 1 с выхода элемента ЗИ42 (переводит RS-триггер 46 в состояние |с сигналом 1 на выходе. Далее при переходе тока одной из фаз статора через нулевое значение 1 с выхода элемента ЗИ-ИЕ 43 через элемент ЗИ 4 поступает на выход блока 37 отключе- ия сигналов управления и переводит RS-триггеры 5-7 в состояние с сигналами О на выходе, что обеспечивает отключение тиристоров коммутаторов 1-3 путем естественной коммутации. При тех же условиях подключения, что описаны выше, примерно через 120 эл.град. после подключения комму татора в фазе В становится равным нулю и при отсутствии сигналов управления на тиристорах происходит отключение фазы В электродвигателя 4 от источника электроэнергии. Отключение фаз А и С также происходит при снижении тока в этих фазах до нуля путем естественной коммутации. Исходное состояние блока 37 отключения сигналов управления - 0м на выходах RS-триггеров 44 и 46 - будет установлено сигналом 1 с выхода элемента 4ИЛИ-НЕ 45 при отсутствии токов в фазах и сигнале О на выходе элемента ЗИ 25.
В диапазоне частот вращения ш- (0,5-1,0) предусматриваются работа электродвигателя 4 в симметричном трехфазном режиме в течение примерно 180 эл.град. и отключение сигналов управления тиристорными коммутаторами после того, как токи в двух фазах статора перейдут через нулевое значение. В этом случае блок 37 отключения сигналов управления может быть образован (фиг.4) элементами ЗИ 48 и ЗИ-НЕ 49, входы которых попарно объединены и подключены к выходам датчиков 34-36 тока, RS-триг- гером 50, S-вход которого подключен к выходу элемента ЗИ 25 и одному из входов элемента 4ИЛИ-НЕ 51, другие входы которого объединены с вхидами элемента ЗИ 48, а выход элемента 4ИЛИ-НЕ 51 подключен к R-входам
5
0
г
0
5
0
5
0
5
RS-триггеров 50 и 52 и счетчика 53. Выходы RS-триггеров 50 и 52, а также элемента ЗИ-НЕ 49 через элемент ЗИ 54 подключены на счетный вход счетчика 53, выход которого является выходом блока 37 и подключен к R-входам RS-триггеров 5-7.
При этом устройство работает следующим образом. В момент совпадения полярностей фазных и модулирующих напряжений во всех трех фазах 1 с выхода элемента ЗИ 25 переводит RS-триггер 50 в состояние с сигналом 1 на выходе. Погле подключения всех трех фаз электродвигателя 4 к источнику электроэнергии 1 с выхода элемента ЗИ 48 переведет RS-триггер 52 в состояние с сигналом 1 на выходе. Далее при переходе тока одной из фаз статора через нулевое значение 1 с выхода элемента ЗИ-НЕ 49 через элемент ЗИ 54 поступает на счетный вход счетчика 53. После того, как в двух фазах токи перейдут нулевое значение, на выходе счетчика 53 устанавливается сигнал 1, который переводит RS-триггеры 5-7 в состояние с сигналами О на выходе, что обеспечивает отключение тиристорных коммутаторов 1-3 путем естественной коммутации. Примерно через 180 эл.град. после подключения коммутатора 1 в третьей фазе ток в фазе А становится равным нулю и при отсутствии сигналов управления на тиристорах происходит отключение фазы А электродвигателя 4 от источника электроэнергии. Отключение фаз В и С также происходит путем естественной коммутации при снижении тока в этих фазах до нуля. Исходное состояние блока 37 отключения сигналов управления - О на выходах RS-триггеров 50, 52 и счетчика 53 - устанавливается сигналом 1 с выхода элемента 4ИЛИ-НЕ 51 при отсутствии токов в фазах и сигнале О на выходе элемента ЗИ 25.
Так как средняя скорость магнитного потока статора при подключенном напряжении питания снижается, электрические потери, обусловленные скольжением, также снижаются. Это повышает экономичность, надежность и срок службы электропривода. Таким образом, снижение потерь в электродвигателе улучшает его технико-экономические показатели и дает экономию в народном хозяйстве. То, что электропривод
становится более экономичным и надежным, позволяет также расширить область его применения.
Формула изобретения
Способ управления асинхронным электроприводом с тиристорным коммутатором в фазах статора электродвигателя, при котором напряжение пита- ния подключают к обмоткам статора в два этапа, при этом на первом этапе определяют две фазы источника электроэнергии, между которыми напряжение максимально, и включают ти- ристоры коммутатора в этих фазах, после чего на втором этапе через четверть периода напряжения питания включают тиристоры коммутатора в третьей фазе, отличающий- с я тем, что, с целью повышения экономичности, формируют трехфазную симметричную систему модулирующих напряжений с тем же порядком чередования фаз, что и у источника элект- роэнергии, с частотой, соответствующей заданной угловой скорости вращения ротора электродвигателя, сравнивают полярности фазных напряжений источника электроэнергии с полярностями модулирующих напряжений для каждой фазы в отдельности, определяют интервалы времени, в которых совпадают полярности указанных напряжений во всех трех фазах, в течение указанных интервалов времени определяют указанные две фазы источника электроэнергии между которыми напряжение максимально, и осуществляют указанное подключение тиристоров в этих фазах, а после включения тиристоров в третьей фазе на втором этапе контролируют токи в фазах статора и формируют управляющие воздействия на отключение тиристорных коммутаторов, при этом для диапазона частот вращения (и (О,5-1,0)oJ0 управляющее воздействие на отключение тиристорных коммутаторов формируют после перехода токов в двух фазах статора через нулевое значение, для диапазона частот вращения и (0, 3-0, 5) - после перехода тока в одной из фаз статора через нулевое значение, а для диапазона частот вращения и) (0,2- -0,3)ы0 после появления тока в третьей фазе статора, где jJ0 синхронная частота вращения электродвигателя.
Фиг.1
Фиг.З
| Способ управления асинхронным электроприводом | 1982 |
|
SU1035767A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ импульсного регулирования частоты вращения асинхронного электропривода | 1982 |
|
SU1072227A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
