Изобретение относится к электротехнике и может быть использовано в электроприводах, в которых требуется глубокое регулирование скорости, высокая перегрузочная способность, обеспечение тяжелого пуска из стопорного режима.
Известно устройство для управления двигателем двойного питания, содержащее асинхронный двигатель с фазным ротором, статорные и роторные обмотки которого подключены к выходам преобразователей частоты статора и частоты ротора соответственно, датчик фазных токов статора, подключенный выходами к управляющим входам блока преобразования токов статора, датчик фазных напряжений статора, подключенный выходами к входам для опорных сигналов блока преобразования токов статора и к входам датчика частоты токов статора, выход которого подключен к второму управляющему входу преобразователя частоты статора, блоки задания амплитуд напряжений статора и ротора, подключенные выходами к первым управляющим входам преобразователей частоты статора и ротора соответственно, блок преобразования магнитных потоков, подключенный входами к выходам датчика ЭДС Холла и датчика фазных напряжений, а выходами соединенный с входами квадраторов, первый сумматор, входами подключенный к выходам квадраторов, а выходом соединенный с первым входом блока сравнения, второй вход которого подключен к выходу блока задания амплитуды магнитного потока, первый интегратор, соединенный входом с выходом блока сравнения, а выходом подключенный к третьему управляющему входу преобразователя частоты ротора, умножители, подключенные входами к выходам блока преобразования токов статора и блока преобразования магнитных потоков, второй сумматор, соединенный входами с выходами умножителей, а выходом через второй интегратор подключенный к третьему управляющему входу преобразователя частоты статора, первый фильтр, подключенный входом к выходам датчика фазных напряжений статора, а выходом соединенный с входом первого блока прямого преобразования координат, второй фильтр, соединенный входом с выходами датчика фазных напряжений ротора, а выходом соединенный со входом второго блока прямого преобразования координат, первый арифметический блок, первый вход которого соединен с выходом первого блока прямого преобразования координат, а второй вход - с выходом второго блока прямого преобразования координат, выход же первого арифметического блока подключен к первым входам третьего и второго арифметических блоков и к первому входу компаратора частоты, задающий генератор двухфазного гармонического сигнала, соединенный выходом со вторым входом второго арифметического блока и со вторым входом частотного компаратора, управляемый аналоговый коммутатор, подключенный входом к выходу второго арифметического блока, а управляющим входом - к выходу частотного компаратора, третий арифметический блок, второй вход которого соединен с выходом управляемого аналогового коммутатора, а выход - с входом блока обратного преобразования координат, который в свою очередь соединен с входом блока формирования управляющих импульсов, выход которого через делитель подключен ко второму управляющему входу преобразователя частоты ротора (SU 1610589, МПК 5 Н02Р 7/42, опубл. 30.11.90).
В отличие от наиболее близкого аналога, обеспечивающего минимум потерь в стали базовой машины и минимум электрических потерь в меди фазных обмоток, а также высокую перегрузочную способность за счет поддержания ортогональности векторов тока статора и результирующего магнитного потока воздушного зазора АД и имеющего в составе системы управления датчики Холла, что подразумевает специальную конструкцию базовой машины, в предлагаемом решении вычисление проекций вектора результирующего магнитного потока осуществляется по мгновенным значениям фазных токов статора и ротора, измеряемых датчиками в соответствующих цепях, что позволяет применять в качестве базовой машины серийный асинхронный двигатель.
Технический результат заключается в реализации законов управления, благодаря которым устройство приобретает свойства, присущие электроприводу с двигателем постоянного тока.
Сущность изобретения заключается в том, что в устройство для управления двигателем двойного питания, содержащее асинхронный двигатель с фазным ротором, статорные и роторные обмотки которого подключены к выходам преобразователей частоты статора и частоты ротора соответственно, датчик фазных токов статора, датчик фазных напряжений статора, подключенный к входам датчика частоты токов статора, выход которого подключен к второму управляющему входу преобразователя частоты статора, блоки задания амплитуд напряжений статора и ротора, подключенные выходами к первым управляющим входам преобразователей частоты статора и ротора соответственно, умножители, сумматор, соединенный входами с выходами умножителей, а выходом подключенный через интегратор к третьему управляющему входу преобразователя частоты статора, задатчик амплитуды магнитного потока, первый арифметический блок, подключенный выходом к первым входам третьего и второго арифметических блоков и к первому входу компаратора частоты, задающий генератор двухфазного гармонического сигнала, соединенный выходом с вторым входом второго арифметического блока и со вторым входом компаратора частоты, управляемый аналоговый коммутатор, подключенный входом к выходу второго арифметического блока, а управляющим входом - к выходу частотного компаратора, третий арифметический блок, второй вход которого соединен с выходом управляемого аналогового коммутатора, делитель, введены преобразователь числа фаз статора, наблюдатель результирующего магнитного потока, тригонометрический анализатор, обратный преобразователь координат токов статора, первый синусно-косинусный преобразователь, обратный преобразователь координат токов ротора, преобразователь числа фаз ротора, датчик токов ротора, регулятор результирующего магнитного потока, блок компенсации ЭДС ротора, прямой преобразователь координат напряжений ротора, второй синусно-косинусный преобразователь, блок заданий частоты токов ротора, задатчик угловой скорости ротора, регулятор угловой скорости ротора, блок вычисления угловой скорости ротора, блок вычисления частоты токов ротора, регулятор момента, вычислитель момента, регулятор составляющей тока статора iys, блок компенсации ЭДС статора, регулятор составляющей тока статора ixs, прямой преобразователь координат напряжений статора, выход которого соединен с входом блока задания амплитуды напряжения статора, а первый вход соединен с выходом блока компенсации ЭДС статора, два других при этом соединены с первым и вторым выходами тригонометрического анализатора. Первый вход блока компенсации ЭДС статора соединен с выходом регулятора составляющей тока статора iys, второй - с выходом регулятора составляющей тока статора ixs, первый вход которого «занулен», а второй вход соединен со вторым выходом обратного преобразователя координат токов статора. Первый вход регулятора составляющей тока статора iys соединен с выходом регулятора момента, а второй вход - с первым выходом обратного преобразователя координат токов статора. Один вход регулятора момента соединен с выходом вычислителя момента, первый вход которого подключен к третьему выходу тригонометрического анализатора, а второй вход подключен к первому выходу обратного преобразователя координат токов статора. Другой вход регулятора момента соединен с выходом регулятора угловой скорости ротора, первый вход которого подключен к выходу задатчика угловой скорости ротора, а второй - к выходу блока вычисления угловой скорости ротора, соединенного первым входом с выходом блока заданий частоты токов ротора, а вторым входом - с выходом датчиков частоты токов статора. Вход блока заданий амплитуды напряжения ротора соединен с выходом прямого преобразователя координат напряжений ротора, первый вход которого соединен с выходом блока компенсации ЭДС ротора, а два других входа - с выходами второго синусно-косинусного преобразователя, вход которого соединен с выходом блока заданий частоты токов ротора и первым входом блока вычисления угловой скорости ротора. Вход блока заданий частоты токов ротора соединен с выходом делителя, выход которого подключен к входу блока вычисления частоты токов ротора. Вход блока компенсации ЭДС ротора соединен с выходом регулятора результирующего магнитного потока, один вход которого соединен с третьим выходом тригонометрического анализатора, а другой - с выходом задатчика амплитуды магнитного потока. Третий и четвертый выходы тригонометрического анализатора соединены также со входами умножителей, а входы - с выходами наблюдателя результирующего магнитного потока. Вход преобразователя числа фаз ротора соединен с выходами датчика токов ротора, а его выход подключен к третьему входу обратного преобразователя координат токов ротора, первый и второй входы которого подключены к выходам первого синусно-косинусного преобразователя, соединенного своим входом с выходом блока вычисления угловой скорости ротора и входом первого арифметического блока. При этом выходы обратного преобразователя координат токов ротора соединены с третьим и четвертым входами наблюдателя результирующего магнитного потока, первый и второй входы которого подключены к выходам преобразователя числа фаз статора. Третий и четвертый входы обратного преобразователя координат токов статора также соединены с выходами преобразователя числа фаз статора, а первый и второй выходы обратного преобразователя координат токов статора соединены с соответствующими входами умножителей. Вход преобразователя числа фаз статора подключен к выходам датчика фазных токов статора.
На чертеже изображена функциональная схема устройства для управления двигателем двойного питания, который содержит асинхронный двигатель 1 с фазным ротором, статорные и роторные обмотки которого подключены соответственно к выходам преобразователя частоты статора 2 и преобразователя частоты ротора 3, датчик 4 фазных токов статора, подключенные выходами к входу преобразователя числа фаз статора 5, выходы которого соединены с первым и вторым входами наблюдателя результирующего магнитного потока 6, подключенного выходами к входам тригонометрического анализатора 7, первый и второй выходы которого соединены с первым и вторым входом обратного преобразователя координат токов статора 8, третий и четвертый входы которого соединены с выходами преобразователя числа фаз статора 5. Выходы первого синусно-косинусного преобразователя 9 подключены к первому и второму входам обратного преобразователя координат токов ротора 10, третий вход которого соединен с выходом преобразователя числа фаз ротора 11, соединенного входом с выходами датчика токов ротора 12, а выходы обратного преобразователя координат токов ротора 10 соединены с третьим и четвертым входами наблюдателя результирующего магнитного потока 6. Выход задатчика амплитуды магнитного потока 13 соединен с первым входом регулятора результирующего магнитного потока 14, второй вход которого соединен с третьим выходом тригонометрического анализатора 7, а выход - с входом блока компенсации ЭДС ротора 15, соединенного выходом с первым входом прямого преобразователя координат напряжений ротора 16, два других входа которого соединены с выходами второго синусно-косинусного преобразователя 17. Выход прямого преобразователя координат напряжений ротора 16 соединен со входом блока заданий амплитуды напряжения ротора 18, выход которого соединен с первым входом преобразователя частоты ротора 3. Выход блока заданий частоты токов ротора 19 соединен со вторым входом преобразователя частоты ротора 3 и входом второго синусно-косинусного преобразователя 17. Выход задатчика угловой скорости ротора 20 соединен с первым входом регулятора угловой скорости ротора 21, второй вход которого соединен с выходом блока вычисления угловой скорости ротора 22, соединенного первым входом с выходом блока заданий частоты токов ротора 19, а вторым входом с выходом датчика 23 частоты токов статора, вход которого соединен с датчиком 24 фазных напряжений статора. Выход регулятора угловой скорости ротора 21 соединен с первым входом регулятора момента 25, второй вход которого соединен с выходом вычислителя момента 26, первый вход которого подключен к третьему выходу тригонометрического анализатора 7, а второй вход подключен к первому выходу обратного преобразователя координат токов статора 8. Первый вход регулятора 27 составляющей тока статора iys соединен с выходом регулятора момента 25, а второй вход - с первым выходом обратного преобразователя координат токов статора 8. Выход регулятора 27 составляющей тока статора iys соединен с первым входом блока компенсации ЭДС статора 28, второй вход которого соединен с выходом регулятора 29 составляющей тока статора iys, первый вход которого «занулен», а второй вход соединен со вторым выходом обратного преобразователя координат токов статора 8. Выход блока компенсации ЭДС статора 28 соединен с первым входом прямого преобразователя координат напряжений статора 30, второй и третий входы которого соединены с первым и вторым выходами тригонометрического анализатора 7. Выход прямого преобразователя координат напряжений статора 30 соединен с входом блока заданий амплитуды напряжения статора 31, соединенного выходом с первым входом преобразователя частоты статора 2, третий вход которого соединен с выходом интегратора 32, соединенного входом с выходом сумматора 33, к первому входу которого подключен выход умножителя 34, соединенного первым входом с первым выходом обратного преобразователя координат токов статора 8, а вторым - с четвертым выходом тригонометрического анализатора 7. Второй вход сумматора 33 подключен к выходу умножителя 35, соединенного первым входом с третьим выходом тригонометрического анализатора 7, а вторым входом - со вторым выходом обратного преобразователя координат токов статора 8. Второй вход преобразователя частоты статора 2 соединен с выходом датчика 23 частоты токов статора. Вход первого арифметического блока 36 соединен с выходом блока вычисления угловой скорости ротора 22, а выход первого арифметического блока 36 подключен к первым входам третьего 37 и второго 38 арифметических блоков и к первому входу компаратора частоты 39. Выход задающего генератора двухфазного гармонического сигнала 40 соединен со вторым входом второго арифметического блока 38 и с вторым входом компаратора частоты 39. Вход управляемого аналогового коммутатора 41 подключен к выходу второго арифметического блока 38, а управляющий вход - к выходу компаратора частоты 39. Второй вход третьего арифметического блока 37 соединен с выходом управляемого аналогового коммутатора 41, а выход - с входом блока 42 вычисления частоты токов ротора, который в свою очередь соединен с входом делителя 43, подключенного к входу блока заданий частоты токов ротора 19.
Устройство работает следующим образом. На силовые входы преобразователей частоты 2 и 3 подают напряжение питания. По сигналам с выходов блоков задания амплитуд напряжений статора 31 и ротора 18 начинают работать выпрямительные звенья преобразователей частоты 2 и 3. В первый момент сигналы управления инверторными звеньями преобразователей 2, 3 частоты статора и ротора отсутствуют. Соответственно сигнал на входе первого арифметического блока 36 равен нулю. Задающий генератор 40 двухфазного гармонического сигнала вырабатывает двухфазный синусоидальный низкочастотный сигнал частотой порядка 6-10 Гц, который подается на второй вход второго арифметического блока 38. На первый вход третьего арифметического блока 37 поступает сигнал с выхода первого арифметического блока 36. Во втором арифметическом блоке 38 двухфазные синусоидальные сигналы преобразуются согласно выражениям
sinω0t·cosωrt-cosω0t·sinωrt=sin(ω0-ωr)t=sinω1t;
cosω0t·cosωrt+sinω0t·sinωrt=cos(ω0-ωr)t=cosω1t,
где ω0 - выходная частота задающего генератора двухфазного синусоидального напряжения; ωr - угловая частота вращения ротора;
ω1=ω0-ωr.
С выхода второго арифметического блока 38 сигнал поступает на вход управляемого аналогового коммутатора 41, на управляющий вход которого поступает сигнал управления с выхода компаратора частоты 39. На первый и второй входы компаратора частоты 39 подаются сигналы с выходов соответственно первого арифметического блока 36 cosωrt и задающего генератора двухфазного гармонического сигнала 40 cosω0t. Когда частота синусоидального сигнала на первом входе компаратора частоты 39 становится больше частоты синусоидального сигнала на втором его входе, на выходе формируется сигнал логического нуля. При частоте сигнала на первом входе компаратора частоты 39 меньше, чем на втором, на выходе формируется сигнал логической единицы. В начальный момент ротор двигателя неподвижен (ωr=0) и соответственно сигнал на входе компаратора частоты 39 имеет уровень логической единицы.
Если на управляющем входе управляемого аналогового коммутатора 41 присутствует уровень логической единицы, то он замкнут, и входной сигнал без изменений поступает на выход. Если управляющий сигнал имеет уровень логического нуля, управляемый аналоговый коммутатор 41 разомкнут и сигнал на его выходе равен нулю.
С выхода управляемого аналогового коммутатора 41 сигнал поступает на второй вход третьего арифметического блока 37, на первый вход которого подается сигнал с выхода первого арифметического блока 36. В третьем арифметическом блоке 37 двухфазные синусоидальные сигналы преобразуются согласно выражениям
sinω1t·cosωrt-cosω1t·sinωrt=sin(ω1-ωr)t;
cosω1t·cosωrt+sinω1t·sinωrt=cos(ω1-ωr)t,
где ω1 - частота на выходе второго арифметического блока 38.
С выхода третьего арифметического блока 37 сигнал поступает на вход блока 42 вычисления частоты токов ротора. После преобразования в блоке 42 вычисления частоты токов ротора сигнал проходит через делитель 43 с коэффициентом деления К=2 и поступает на вход блока заданий частоты токов ротора 19. Так как в начальный момент времени частота вращения ротора ωr=0, то после прохождения через второй 38 и третий 37 арифметические блоки и деления делителем 43 сигнал будет иметь частоту
Частота  является начальной частотой возбуждения (частотой тока ротора).
является начальной частотой возбуждения (частотой тока ротора).
Сигналом управления с блока заданий частоты токов ротора 19 включается инверторное звено преобразователя частоты ротора 3. В обмотках неподвижного ротора асинхронного двигателя 1 начинает протекать трехфазный низкочастотный ток возбуждения частотой  , создающий вращающееся магнитное поле, наводящее ЭДС той же частоты в обмотках статора.
, создающий вращающееся магнитное поле, наводящее ЭДС той же частоты в обмотках статора.
где ωс - угловая (синхронная) частота токов статора.
Сигналы с датчика токов ротора 12 подвергаются преобразованиям в преобразователе числа фаз ротора 11 и преобразователе координат токов ротора 10 с помощью сигналов sinη и cosη из первого синусно-косинусного преобразователя 9, вычисляющего эти значения по сигналу с блока вычисления угловой скорости ротора 22. Наблюдатель результирующего магнитного потока 6 формирует составляющие вектора потока в системе координат статора α, β.

Так как в начальный момент задатчик угловой скорости ротора 20 установлен в положение, соответствующее нулевой скорости, то вентили инверторного звена преобразователя частоты статора 2 заперты ЭДС статорной цепи. Ток в этой цепи отсутствует, и составляющие вектора магнитного потока в системе координат статора формируются только за счет токов ротора и преобразуются тригонометрическим анализатором 7 в систему координат x, y. Составляющая Ψxδ сравнивается регулятором результирующего магнитного потока 14 с выходным сигналом задатчика амплитуды магнитного потока 13. Сигнал рассогласования с выхода регулятора результирующего магнитного потока 14, проходя через блок компенсации ЭДС ротора 15, поступает на вход прямого преобразователя координат напряжений ротора 16, где подвергается преобразованиям из системы координат x, y в систему координат ротора d, q с помощью выходных сигналов второго синусно-косинусного преобразователя 17. Сигнал с выхода прямого преобразователя координат напряжений ротора 16 поступает на вход блока заданий амплитуды напряжения ротора 18, выходной сигнал которого изменяет амплитуду напряжения ротора таким образом, что составляющая магнитного потока Ψxδ, определяющая модуль вектора потока, остается равной величине, установленной в задатчике амплитуды магнитного потока 13.
Поскольку в начальный момент ротор асинхронного двигателя 1 неподвижен, то от датчика 23 частоты токов статора, подключенного к датчику 24 фазных напряжений статора, на управляющий вход преобразователя частоты статора 2 (на управляющий вход инвертора тока) поступает сигнал управления с частотой токов ротора ω2. Этот же сигнал подается на вход блока вычисления угловой скорости ротора 22, на второй вход которого приходит сигнал с блока заданий частоты токов ротора 19, а выходной сигнал, пропорциональный угловой механической скорости ротора ωr, поступает на вход регулятора угловой скорости ротора 21, где сравнивается с сигналом задатчика угловой скорости ротора 20, а результат сравнения поступает на вход регулятора момента 25. На второй его вход приходит сигнал с выхода вычислителя момента 26, в котором производится вычисление электромагнитного момента по соотношению

Необходимые для вычислений составляющие поступают с тригонометрического анализатора 7 и обратного преобразователя координат токов статора 8. Выходной сигнал регулятора момента 25 является задающим для регулятора 27 составляющей тока статора iys и сравнивается с выходным сигналом обратного преобразователя координат токов статора 8. Сигнал рассогласования составляющей тока статора Δiys подается на вход блока компенсации ЭДС статора 28. Сигнал рассогласования второй составляющей тока статора Δixs, поступающий на другой вход блока компенсации ЭДС статора 28, вычисляется в регуляторе 29 составляющей тока статора ixs по сигналу с выхода обратного преобразователя координат токов статора 8. Выходной сигнал блока компенсации ЭДС статора 28 преобразуется прямым преобразователем координат напряжений статора 30 в систему координат статора α, β и управляет блоком заданий амплитуды напряжения статора 31, регулирующим амплитуду напряжения выпрямительного звена преобразователя частоты статора 2.
Выходные сигналы тригонометрического анализатора 7 и обратного преобразователя координат токов статора 8 поступают на входы умножителей 34 и 35, осуществляющих перемножение одноименных составляющих потока Ψδ и тока is, и таким образом на выходе умножителя 34 получают сигнал, пропорциональный произведению Ψyδ·iys, а на выходе умножителя 35 - Ψxδ·ixs.
В электроприводе осуществляется контроль ортогональности векторов тока статора и результирующего магнитного потока в воздушном зазоре, что выполняется при условии равенства нулю их скалярного произведения Ψδ·is=0 или в координатах x, y

Это условие реализуется при помощи сумматора 33 и интегратора 32, сигнал с выхода которого поступает на управляющий вход преобразователя частоты статора 2 (управляющий вход инвертора тока) и определяет смещение фазы управляющих импульсов до тех пор, пока не будет выполнено условие (3). При этом достигается максимум электромагнитного вращающего момента базовой машины Mмакс=Ψδ·is при текущих значениях тока статора и результирующего магнитного потока в воздушном зазоре или при данной нагрузке на валу и заданном значении магнитного потока будет обеспечен минимальный ток статора, т.е. минимальные электрические потери в обмотках статора и силовой части преобразователя частоты статора 2.
Для пуска электропривода необходимо задать значение угловой механической скорости ротора ωr, отличное от нуля. Это приведет к появлению сигналов рассогласования на выходах регулятора угловой скорости ротора 19, регулятора момента 23, регулятора 25 составляющей тока статора iys и сигналов управления на выходах блока компенсации ЭДС статора 26, прямого преобразователя координат токов статора 28 и блок заданий амплитуды напряжения статора 29. В результате начнет увеличиваться амплитуда напряжения на выходе выпрямительного звена преобразователя частоты статора 2, что приведет к пуску инверторного звена и возникновению тока в статорной цепи асинхронного двигателя 1. На выходе датчика 4 фазных токов статора появляются сигналы, пропорциональные протекающим токам, которые, поступая в преобразователь числа фаз статора 5, переводятся из трехфазной естественной системы координат в двухфазную систему координат статора α, β. Нарастающий ток статора приводит к появлению статорной составляющей результирующего магнитного потока, вычисляемого наблюдателем результирующего магнитного потока 6 в соответствии с (1). Это вызывает появление сигнала рассогласования на выходе регулятора результирующего магнитного потока 15, который воздействует на преобразователь частоты ротора 3, изменяя амплитуду напряжения ротора таким образом, что результирующий магнитный поток останется равным заданному.
Увеличение тока статора приводит к возникновению электромагнитного момента. Как только он превысит значение момента сопротивления на валу, ротор начнет вращаться. Частота токов в статоре начинает возрастать

где ωс - угловая (синхронная) частота токов статора;
ω2 - угловая частота токов ротора;
ωе=ωr·pП - электромагнитная угловая скорость вращения ротора;
ωr - механическая угловая скорость вращения ротора;
рП - число пар полюсов АД,
что фиксируется датчиком 24 фазных напряжений статора и датчиком 4 фазных токов статора и продолжается до тех пор, пока рассчитанное в блоке вычисления угловой скорости ротора 22 значение не сравняется с сигналом задатчика угловой скорости ротора 20. В процессе этого происходит вычисление электромагнитного момента по (2), проекций тока статора ixs, iys и сравнение их с задаваемыми значениями в соответствующих регуляторах. Выходные сигналы регуляторов воздействуют на амплитуду напряжения преобразователя частоты статора 2. Одновременно сигнал с выхода блока вычисления угловой скорости ротора 22 поступает на вход первого арифметического блока 36.
При увеличении частоты вращения ротора ωr частота сигнала на выходе второго арифметического блока 38, равная
ω1=ω0-ωr,
начинает уменьшаться. Уменьшается также частота на выходе третьего арифметического блока 37:

Частота возбуждения соответственно равна
Когда скорость ротора достигнет значения  и частота возбуждения ω2=0, то в обмотке ротора течет постоянный ток. При дальнейшем увеличении частоты вращения ротора ωr частота возбуждения ω2 изменяет знак и начинает возрастать, но уже с отрицательным знаком. В момент изменения знака ω2 один из сигналов с выхода третьего арифметического блока 37, а именно
и частота возбуждения ω2=0, то в обмотке ротора течет постоянный ток. При дальнейшем увеличении частоты вращения ротора ωr частота возбуждения ω2 изменяет знак и начинает возрастать, но уже с отрицательным знаком. В момент изменения знака ω2 один из сигналов с выхода третьего арифметического блока 37, а именно  , меняет знак на противоположный. Это приводит к изменению чередования фаз с выхода блока 42 вычисления частоты токов ротора на обратное, что обеспечивает изменение направления вращения магнитного поля ротора. При этом результирующее магнитное поле в воздушном зазоре машины вращается с частотой ωс=ωr-ω2.
, меняет знак на противоположный. Это приводит к изменению чередования фаз с выхода блока 42 вычисления частоты токов ротора на обратное, что обеспечивает изменение направления вращения магнитного поля ротора. При этом результирующее магнитное поле в воздушном зазоре машины вращается с частотой ωс=ωr-ω2.
Когда частота вращения ротора ωr становится равной частоте ω0 задающего генератора двухфазного гармонического сигнала 40, частота сигнала на выходе второго арифметического блока 38 ω1=ω0ωr и, следовательно, на выходе управляемого аналогового коммутатора 41 равна нулю. Одновременно происходит изменение логического сигнала на выходе компаратора частоты 39 - он становится равным логическому нулю и управляемый аналоговый коммутатор 41 перестает пропускать входной сигнал на выход. В результате на втором входе третьего арифметического блока 37 сигнал равен нулю.
Когда частота вращения ротора ωr превысит выходную частоту ω0 задающего генератора двухфазного гармонического сигнала 40, с выхода третьего арифметического блока 37 будет сниматься двухфазный сигнал частотой - ωr. После деления частоты делителем 43 сигнал частотой  поступает через блок заданий частоты токов ротора 19 на второй управляющий вход преобразователя частоты ротора 3.
поступает через блок заданий частоты токов ротора 19 на второй управляющий вход преобразователя частоты ротора 3.
При дальнейшем увеличении скорости вращения ротора частота возбуждения поддерживается равной половине частоты вращения ротора.
При изменении нагрузки электропривода скорость ротора начинает меняться, в результате частота токов в статоре асинхронного двигателя 1 также изменятся, что приводит к изменению выходного сигнала блока вычисления угловой скорости ротора 22. Это в свою очередь приводит к соответствующему изменению сигналов управления на выходах блока компенсации ЭДС статора 28, прямого преобразователя координат токов статора 30 и блока задания амплитуды напряжения статора 31. В результате начнет изменяться амплитуда напряжения на выходе выпрямительного звена преобразователя частоты статора 2, вызывая изменение тока статора и, соответственно, электромагнитного момента и скорости ротора таким образом, что она будет стремиться к заданной. Контур регулирования результирующего магнитного потока отрабатывает изменения тока статора так, что поток остается равным заданному.
По сравнению с известным решением предлагаемое позволяет создать электропривод на базе серийного асинхронного двигателя с фазным ротором, включенного по схеме двойного питания, обеспечивающего возможность тяжелых повторных пусков, обладающего жесткими механическими характеристиками, высокими энергетическими показателями, глубокой и плавной регулировкой скорости вращения ротора посредством изменения напряжения статора аналогично электроприводу с двигателем постоянного тока.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2006 |
|
RU2313895C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2011 |
|
RU2477562C1 |
| Устройство для управления двигателем двойного питания | 2016 |
|
RU2625720C1 |
| Способ управления двигателем двойного питания, выполненным на базе асинхронного двигателя с фазным ротором, и устройство для его осуществления | 1987 |
|
SU1610589A2 |
| Способ управления двигателем двойного питания, выполненным на базе асинхронного двигателя с фазным ротором и устройство для его осуществления | 1987 |
|
SU1515323A1 |
| СИСТЕМА УПРАВЛЕНИЯ МАШИНОЙ ДВОЙНОГО ПИТАНИЯ | 1995 |
|
RU2106055C1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2317632C1 |
| Устройство для частного управленияэлЕКТРОпРиВОдОМ пЕРЕМЕННОгО TOKA | 1978 |
|
SU794701A1 |
| Частотно-регулируемый синхронный электропривод | 1986 |
|
SU1319220A2 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
Изобретение относится к области электротехники и может быть использовано в электроприводах, в которых требуется глубокое регулирование скорости, высокая перегрузочная способность, обеспечение тяжелого пуска из стопорного режима. Устройство для управления содержит асинхронный двигатель с фазным ротором, преобразователи частоты статора и ротора, датчики фазных токов статора, наблюдатель результирующего магнитного потока, тригонометрический анализатор, прямой и обратный преобразователи координат токов статора, преобразователь числа фаз статора, блок заданий постоянной частоты токов ротора, синусно-косинусный преобразователь, преобразователь координат токов ротора, задатчик амплитуды магнитного потока, регулятор результирующего магнитного потока, блок компенсации ЭДС ротора, блок заданий амплитуды напряжения ротора, задатчик угловой скорости ротора, регулятор угловой скорости ротора, блок вычисления угловой скорости ротора, датчик частоты токов статора, датчики фазных напряжений статора. Устройство для управления содержит также регулятор момента, вычислитель момента, регулятор компенсации ЭДС статора, регуляторы составляющих тока статора, блок заданий амплитуды напряжения статора, интегратор, сумматор, умножитель. Соединение указанных блоком осуществлено в соответствии с материалами заявки. Технический результат заключается в создании электропривода на базе серийного асинхронного двигателя с фазным ротором, включенного по схеме двойного питания, обеспечивающего возможность тяжелых повторных пусков, обладающего жесткими механическими характеристиками, высокими энергетическими показателями, глубокой и плавной регулировкой скорости вращения ротора посредством изменения напряжения статора аналогично электроприводу с двигателем постоянного тока. 1 ил.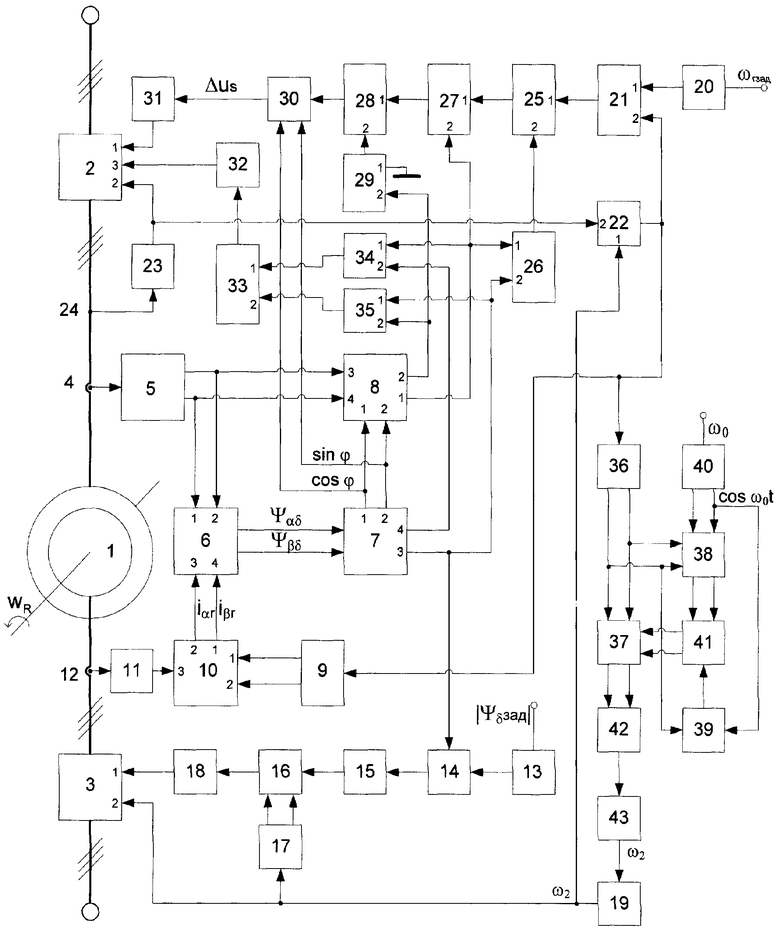
Устройство для управления двигателем двойного питания, содержащее асинхронный двигатель с фазным ротором, статорные и роторные обмотки которого подключены к выходам преобразователей частоты статора и частоты ротора соответственно, датчик фазных токов статора, датчик фазных напряжений статора, подключенный к входам датчика частоты токов статора, выход которого подключен к второму управляющему входу преобразователя частоты статора, блоки задания амплитуд напряжений статора и ротора, подключенные выходами к первым управляющим входам преобразователей частоты статора и ротора соответственно, умножители, сумматор, соединенный входами с выходами умножителей, а выходом подключенный через интегратор к третьему управляющему входу преобразователя частоты статора, задатчик амплитуды магнитного потока, первый арифметический блок, подключенный выходом к первым входам третьего и второго арифметических блоков и к первому входу компаратора частоты, задающий генератор двухфазного гармонического сигнала, соединенный выходом со вторым входом второго арифметического блока и со вторым входом компаратора частоты, управляемый аналоговый коммутатор, подключенный входом к выходу второго арифметического блока, а управляющим входом к выходу частотного компаратора, третий арифметический блок, второй вход которого соединен с выходом управляемого аналогового коммутатора, делитель, отличающееся тем, что введены преобразователь числа фаз статора, наблюдатель результирующего магнитного потока, тригонометрический анализатор, обратный преобразователь координат токов статора, первый синусно-косинусный преобразователь, обратный преобразователь координат токов ротора, преобразователь числа фаз ротора, датчик токов ротора, регулятор результирующего магнитного потока, блок компенсации ЭДС ротора, прямой преобразователь координат напряжений ротора, второй синусно-косинусный преобразователь, блок заданий частоты токов ротора, задатчик угловой скорости ротора, регулятор угловой скорости ротора, блок вычисления угловой скорости ротора, блок вычисления частоты токов ротора, регулятор момента, вычислитель момента, регулятор составляющей тока статора iys, блок компенсации ЭДС статора, регулятор составляющей тока статора ixs, прямой преобразователь координат напряжений статора, выход которого соединен с входом блока задания амплитуды напряжения статора, а первый вход соединен с выходом блока компенсации ЭДС статора, два других при этом соединены с первым и вторым выходами тригонометрического анализатора, первый вход блока компенсации ЭДС статора соединен с выходом регулятора составляющей тока статора iys, второй с выходом регулятора составляющей тока статора ixs, первый вход которого «занулен», а второй вход соединен со вторым выходом обратного преобразователя координат токов статора, первый вход регулятора составляющей тока статора iys соединен с выходом регулятора момента, а второй вход с первым выходом обратного преобразователя координат токов статора, один вход регулятора момента соединен с выходом вычислителя момента, первый вход которого подключен к третьему выходу тригонометрического анализатора, а второй вход подключен к первому выходу обратного преобразователя координат токов статора, другой вход регулятора момента соединен с выходом регулятора угловой скорости ротора, первый вход которого подключен к выходу задатчика угловой скорости ротора, а второй к выходу блока вычисления угловой скорости ротора, соединенного первым входом с выходом блока заданий частоты токов ротора, а вторым входом с выходом датчиков частоты токов статора, вход блока заданий амплитуды напряжения ротора соединен с выходом прямого преобразователя координат напряжений ротора, первый вход которого соединен с выходом блока компенсации ЭДС ротора, а два других входа с выходами второго синусно-косинусного преобразователя, вход которого соединен с выходом блока заданий частоты токов ротора и первым входом блока вычисления угловой скорости ротора, вход блока заданий частоты токов ротора соединен с выходом делителя, выход которого подключен к входу блока вычисления частоты токов ротора, вход блока компенсации ЭДС ротора соединен с выходом регулятора результирующего магнитного потока, один вход которого соединен с третьим выходом тригонометрического анализатора, а другой с выходом задатчика амплитуды магнитного потока, третий и четвертый выходы тригонометрического анализатора соединены также со входами умножителей, а входы с выходами наблюдателя результирующего магнитного потока, вход преобразователя числа фаз ротора соединен с выходами датчика токов ротора, а его выход подключен к третьему входу обратного преобразователя координат токов ротора, первый и второй входы которого подключены к выходам первого синусно-косинусного преобразователя, соединенного своим входом с выходом блока вычисления угловой скорости ротора и входом первого арифметического блока, при этом выходы обратного преобразователя координат токов ротора соединены с третьим и четвертым входами наблюдателя результирующего магнитного потока, первый и второй входы которого подключены к выходам преобразователя числа фаз статора, третий и четвертый входы обратного преобразователя координат токов статора также соединены с выходами преобразователя числа фаз статора, а первый и второй выходы обратного преобразователя координат токов статора соединены с соответствующими входами умножителей, вход преобразователя числа фаз статора подключен к выходам датчика фазных токов статора.
| СИСТЕМА УПРАВЛЕНИЯ МАШИНОЙ ДВОЙНОГО ПИТАНИЯ | 1995 |
|
RU2106055C1 |
| Электропривод с векторным управлением | 1985 |
|
SU1292153A1 |
| Способ управления двигателем двойного питания, выполненным на базе асинхронного двигателя с фазным ротором, и устройство для его осуществления | 1987 |
|
SU1610589A2 |
| Задняя бабка | 1983 |
|
SU1194587A1 |
| US 3859578 А, 07.01.1975 | |||
| DE 1935130 А, 15.01.1970 | |||
| Устройство для поинтервальной закачки реагентов в призабойную зону скважины | 1988 |
|
SU1548414A1 |
| Устройство для контроля качества строительных изделий | 1977 |
|
SU711471A1 |
| WO 2006033181 A1, 30.03.2006. | |||

