fff
в
to
К)
IND
00 Изобретение относится к электро технике.. и может быть использовано в электроприводах конвейеров, например, скребковых, в которых требуется распределение токов нагрузки. , : .4, . : ; .,Известны электропривода скребко вых конвейеров, содержащие базовый и тянущий электродвигатели и регуляторы, в которых обеспечивается контроль распределения токов нагрузки и отключение электропривод при перегрузке и .н гравномерной нагрузке Cl. Недостатки этих .электроприводо определяются.тем, что производител ность конвейера не регулируется, а при неравномерной нагрузке осущест вляется не перераспределение токов а отключение электроприводов,, Наи. бол её близким техническим ре шением к из.обрётению является электропривод, содержащий базовый И тянущий электродвигатели, преобразователи подключенные к якорным обмоткам указанных электродвигателей, регуляторы тока и частоты вращения, подключенные соответственно к преобразователям тянущего и базового электродвигателей. Датчики тока якорей и датчик частоты вращения базового электродви,гателя, подключенный к регулятору частоты вращения. Для скребковых конвейеров требуется различное НаТяжёние холостой и рабочей ветвей цепного тягового органа из-за неодинаковых нагрузок,действующих на ветви t23. Недостатком известного электропривода является то, что из-за отсутствия электрической связи между контурами регулирования возможно только поддержание заданного значения тока н;агрузки тянущего двигателя независимо от режима работы базового двигателя, т.е. невозможно осуществить заданное распределе ние нагрузок между двигателями, что приводит к динамическим перегрузкам двйгателе.й, к уменьшению ресурса цепи конвейера. цель изобретения - уменьшение динамических нагрузок. Поставленная цель достигается тем. Что в электропривод конвейера, содержащий базовый и тянущий электродвигатели, преобразователи, подключенные к их якорным обмоткам, регулятрры тока и частоты вращения, подключенные сортветственно. к преобразователям тянущего и базового электродвигателей, датчики тока якорей и датчик частоты вращения базового элект родвигателя, подключенный к регулятору частоты вращения, дополнительно вредены блок задания соотношения токов, управляемый ключ и блок деления, причем входы блока деления соединены с датчиками тока, а выход - с регулятором тока, к второму входу которого через управляемый ключ подключен блок задания соотношения токов, управляющий вход ключа соединен с датчиком тока якоря базового электродвигателя ; . . -..., . На чертёхсе представлена схема электропривода. Электропривод конвейера содержит базовый 1 и тянущий 2 электродвигатели, преобразователи 3 и 4, подключенные к якорным обмоткам электродвигателей I и 2, регулятор 5 тока и регулятор, б частоты вра1аения, подключенные соответственно к преобразователям 4 и 3, датчики 7 и 8 Tojca якорей электродвигателей 1 и 2 и датчик 9 частоты вращения базового электродвигателя 1, блок 10 задания соотношения токов, управляемый ключ 11 и блок 12 деления, причем входы блока 12 деления соединены с датчиками 7 и В тока а выход -с регулятором 5 тока, к второму входу которого через управляемый ключ 11 подключен блок 10 задания; соотношения токов, управляющий вход ключа 11 соединен с датчиком 8 тока якоря базового электродвигателя 1. Базовый и тянущий электродвигатеЛи 1 и 2 соединены между собой цепью 13. Электропривод работает следующим образом. При пуске электропривода управляк ее напряжение подается на вход регулятора б частоты вращения, при этом увеличивается напряжение преобразователя 3, появляется ток нагрузки ,3 , осуществляется запуск, базового электродвигателя 1. Сигнал с датчика 8 тока поступает на управляющий вход ключа 11 и на один из входов бЛока 12 деления. Второй вход блока 12 деления соединен с выходом датчика 7 тока тянущего электродвигателя 2. В блоке деления осуществляется операция деления U , б де и - выходное напряжение блока 12 деления К - коэффициент пропорциональности; . бт токи базового и тянущего электродвигателей. Выход блока 10 задания соотношения токов подключается через ключ 11 к одному из входов регулятора 5 тока только после поступления сигнала с датчика 8 тока на управлякхций ёход ключа 11. Следовательн управляющее воздействие контура регулирования тянущего электродвигателя 2, т.е. выходной сигнаЛЙз б.лока 10 задания соотношения токоВ воздействует на вход регулятотг ра 5 тока после пуска базового :;эле родвигателя 1. Так как в этот мо мент йремени J.j i О, то U 0. Напряжение на выходе регулятора 5 тока равно . AU . Появление сигнала рассогласована я на входе регулятора 5 тока ври водит к увеличению выходного напряжения преобразователя 4 и к пуску тян5лцёго электродвигателя ,2. . , . .,;. Таким йбразом, запуск тянущего электродвигателя 2 осуществляется после запуска базового электродвигателя 1, т.е. электромагнитные моменты электродвигателей 1 и 2 прикладываются к цепи неодновремен но, тем сакшм снижая суммарные динамические нагрузки при пуске. . ; . , После запуска тянущего электродвигателя 2 через датчик 7 тока на вход блока 12 деления поступает сигнал тока 3 увеличивая тем самым выходное напряжение блока 12 деления и уменьшая напряжение рассогласования на входе регулятора 5 тока. Процесс будет продолжаться до тех пор, пока не установится заданное отнсшение токов . При появлении дополнительных нагрузок в цепи, например в рабочей ветви, увеличивается нагрузка базового электродвигателя 1, т.е. ток S г ° приводит к еньшению О , к увеличению напряжения рассогласования U , к увеличению J- . Таким образом, тянущий электродвигатель .2 прикладывает к базовому электродвигателю J. дополнительные усилия, подтягивая его через холостую ветвь, уменьшая нагрузку, прикладываемую к рабочей &етви. Для того, чтобы сохранилось отношение 37-/Dg,TOK нагрузки Jg уменьшается, а ток нагрузки .3 возрастает. При перегрузке тянущего эле родвигатёля 2 перераспределение нагрузок между электродвигателяьш происходит аналогично. Таким образом, предлагаемый электропривод обеспечивает регулирование скорости движения цепи, расределение нагрузок между электровигателями в заданном отношении, то приводит к уменьшению динами- . еских нагрузок и увеличению ресурса цепи.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод конвейера | 1985 |
|
SU1307529A2 |
| Способ управления электроприводом постоянного тока дебалансного виброисточника и устройство для его осуществления | 1983 |
|
SU1144065A1 |
| Электропривод | 1990 |
|
SU1758820A1 |
| Электропривод постоянного тока | 1981 |
|
SU1005256A1 |
| Электропривод постоянного тока с двухзонным регулированием частоты вращения | 1982 |
|
SU1096745A1 |
| Электропривод подъемной машины с переменными радиусами навивки канатов | 1982 |
|
SU1064408A1 |
| Реверсивный электропривод постоянного тока с двухзонным регулированием частоты вращения | 1986 |
|
SU1394383A1 |
| Нереверсивный вентильный электропривод постоянного тока | 1981 |
|
SU1070679A1 |
| Электропривод | 1985 |
|
SU1277346A1 |
| Реверсивный тиристорный электропривод с двухзонным регулированием | 1977 |
|
SU692043A1 |
ЭЛЕКТРОПРИВОД КОНВЕЙЕРА, содержащий базовый и тянущий электродвигатели, преобразователи, под- ключенные к их якорным обмоткам, j регуляторы тока и частоты вращения, подключенные соответственно к преобразователям тянущего и базового электродвигателей, датчики тока якорей и датчик частоты вращения б&зового электродвигателя, подключенный к регулятору частоты вращения, о тличающийся тем,что, с целью уменьшения динамических нагрузо, в него дополнительно введены блок задания соотношения токов,, управляемый ключ и блок деления, причем входы блока деления соединены с датчиками тока, а выход - с регу(Л лятором тока, к второму входу которого через управляемый ключ подс ключен блок .задания соотношения токов, управляющий вход ключа соединен с датчиком .тока якоря базового S электродвигателя.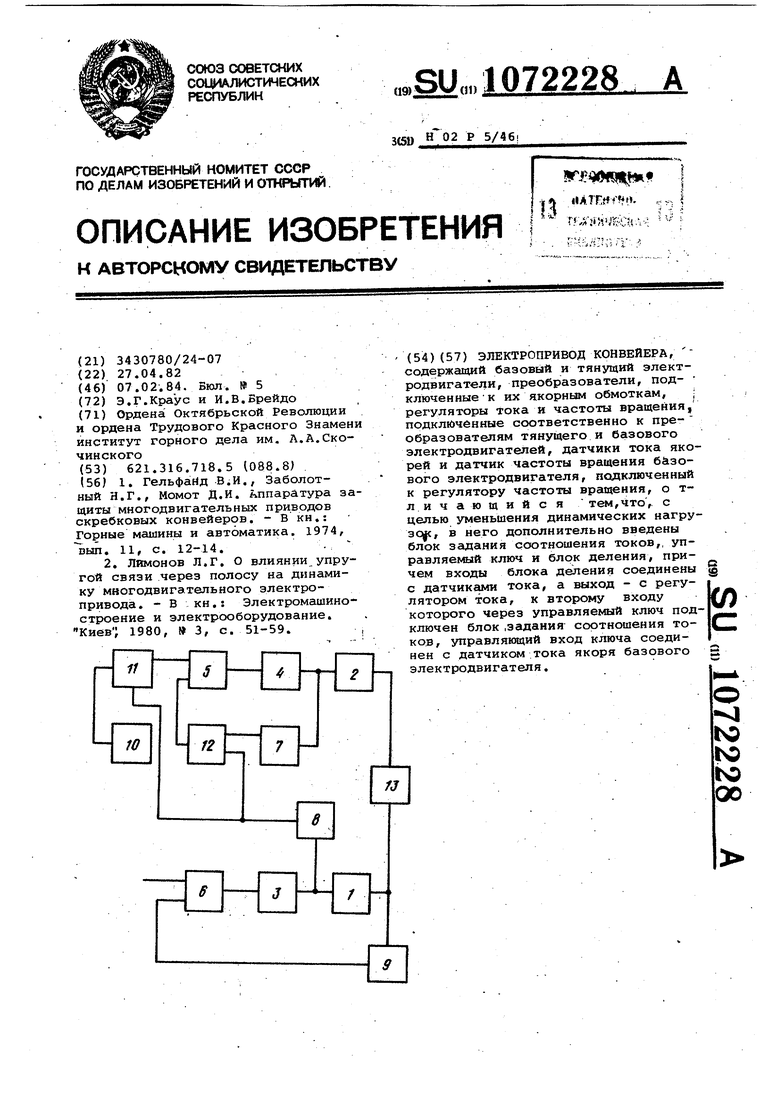
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ГельфаНд В.И., Заболотный Н.Г., Момот Д.И | |||
| аппаратура защиты многодвигательных приводов скребковых конвейеров | |||
| - В кн.: Горные машины и автоматика, 1974, вып | |||
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Лимонов Л.Г | |||
| О влиянии упругой связи через полосу на динамику многодвигательного электропривода | |||
| - В кн.: Электромашиностроение и электрооборудование | |||
| Способ получения фтористых солей | 1914 |
|
SU1980A1 |
| Способ запрессовки не выдержавших гидравлической пробы отливок | 1923 |
|
SU51A1 |
| f/ | |||
