Изобретение относится к сейсмической разведке и сейсмологии, а бо лее конкретно к аппаратуре, используемой для оптимизации режимов рабо ты мощных вибросейсмоисточников. Известны способ и система управления вибратором, в котором регулируют скорость и фазу вращения дебалансов изменением напряжения на якоре в функции заданной развертки фазы сигнала эталонного генератора и фазы сигнала опорной плиты вибратора р . Недостатком, этого способа являет ся то, что при низкой скорости вращения дебалансов в якорной цепи двига еля возникают значительные колебания тока за счет периодическо го наброса разгрузки на валу двигателя, которые вызьшают дополнительный наброс нагрузки на валу двигателя, дополнительный нагрев, вибрацию двигателя, а также колебания круговой скорости вращения деба лансов, что приводит к автоколебаниям в системе управления. Наиболее близким по технической сущности к предлагаемому является способ управления электроприводом постоянного тока механизма с пульсирующей нагрузкой на валу и устройство для его осуществления,в котором регулируют скорость вращени дебалансов изменением напряжения на якоре электропривода в функции заданной развертки частоты колебани и ограничивают при этом максимально значение тока якоря в функции постоянной времени регулятора скорости блока следящей системы, регулирующе го величину напряжения на якоре дви гателя z. Устройство для осуществления известного способа содержит регулируемый вентильный преобразователь, подключенный к якорньм обмоткам и обмоткам возбуждения электродвигателей, вал которьпс соединен с дебалансами и фотоэлектрическим датчиком Подключенным к блоку следящей системы, соединенному через пусковое устройство с входом управления вентильного преобразователя 2 . Недостатком известных способа и устройства отправления .электроприводом является то, что при относител но сложной схеме управления регулирование задания напряжения осущест 652 вляется на якоре электродвигателя. Способ дает положительные результаты сглаживания нагрузочной диаграммы при высокой скорости вращения вала электродвигателя и при неизменной и относительно невысокой амплитуде наброса нагрузки на валу двигателя. Режим работы вибросейсмоисточника с постоянной возмущающей силой в диапазоне частот характеризуется знакопеременной,нагрузкой на валу двигателя, амплитуда которой увеличивается при понижении частоты колеба НИИ дебалансов. При регулировании и задании напряжения только на приводных электродвигателях механизма ток в цепи будет иметь амплитуду колебаний, значительно превьшающую среднее значение тока, что приводит к перегреву и вибрации двигателя, к нестабильности частоты колебаний дебалансов. Цель изобретения - расширение частотного диапазона низкочастотного дебалансного виброисточника. Поставленная цель достигается тем, что согласно способу управления электроприводом постоянного тока дебалансного виброисточника, в котором регулируют скорость вращения дебалансов изменением напряжения на якоре электропривода в функции заданной развертки частоты колебаний и ограничивают при этом максимальное значение тока якоря в функции постоянной времени регулятора скорости блока следящей системы, регулирующего величину напряжения на якоре двигателя, ограничивают напряжение на входе вентильного преобразователя в функции напряжения на его выходе и дополнительно регулируют скорость вращения дебалансов виброисточника путем линейного изменения частоты питания виброисточника, В устройство для осуществления способа, содержащее регулируемый вентильный преобразователь, подключенный к якорным обмоткам и обмоткам возбуждения электродвигателей, вал которых соединен с дебалансами и фотоэлектрическим датчиком, подключенным к блоку следящей системы, соединенному через пусковое устройство с входом управления вентильного преобразователя, введены регулятор напряжения переменного
3
тока и блок управления регулятором, первый вход которого соединён с выходом регулятора и входом вентильн,ого преобразователя, второй вход подключен к выходу вентильного преобразователя, третий вход соединен с одним из выходов блока следящей системы, а вькод соединен с входом управления регулятора напряжения.
При работе вентильного преобразователя (ВП) на силовую цепь,содержащую источник противо-ЭДС, ак тивное сопротивление Rjj и индуктивность Ъц, уравнение внешней характеристики
1)..)
более точно отражает закон изменения внешней характеристики, и после преобразования принимает вид
U Uj co9ot- Ueo-R3lj J (2)
где иj «-{ и в,.л - 1аксимальная ЭДС преобразователя, 11, д фазное линейное напряжение.
„т ,
o(
эквивалентное
сопротивление преобразователя,
Lm и R(p - индуктивность и активное сопротивление фазной обмотки трансформатора ВБ,
iUftQ - падение напряжения на вентилях;
П) - количество фаз вентильного преобразователя;
oDo - частота питающего напряжения;.
У - угол коммутации вентилей.
Для трехфазной симметричной мостовой схемы ВП электропривода виброисточника
Uj U5Uex.A,
тогда уравнение (2) принимает следующий вид:
.5Ue,.(cosw-&U6 -R3lj (3)
При работе электропривода дебалансов виброисточника на низкой частоте (дорезонансный режим) ток Ij в силовой цепи незначительный, угол регулирования oi имеет значение близкое к « J что соответствует режиму работы ВП с зоной прерывистых
440654
токов. При отработке малых отклон1 НИИ скорости (характерно на малых скоростях при падении и подъёме дебалансов) следящей систе- 5 мой управления зона прерывистых токов ВП Ътсазывает существенное вли ние на колебания тока в силовой цепи (и колебания скорости вращения дебалансов). Чтобы исключить зону
0 прерывистых токов и уменьшить колебания тока в силовой цепи, линейное напряжение Ug)(/ уменьшается, а угол регулирования К. имеет значение близкое к 0. Для реализации указанных требований в предлагаемое изобретение введены регулятор напряжения переменного тока и устройство управления им, что и обеспечивает расширение частотного диапазона виброисточника в область низких частот.
Кроме этого при работе ВП на. силовую цепь, близкую к граничнот у режиму, когда ток Ij имеет большую
5 величину колебаний, резко возрастает амплитуда переменной ЭДС, являющейся электрической помехой для слабосточных цепей следяшей системы. Амплитуда каждой гармони- ,
D ки переменной ЭДС определяется углом регулирования (V:
2Ej
t dm I 2 i Гг 7 Icrnr TT COS Ot4(kn,l Sin Oi .
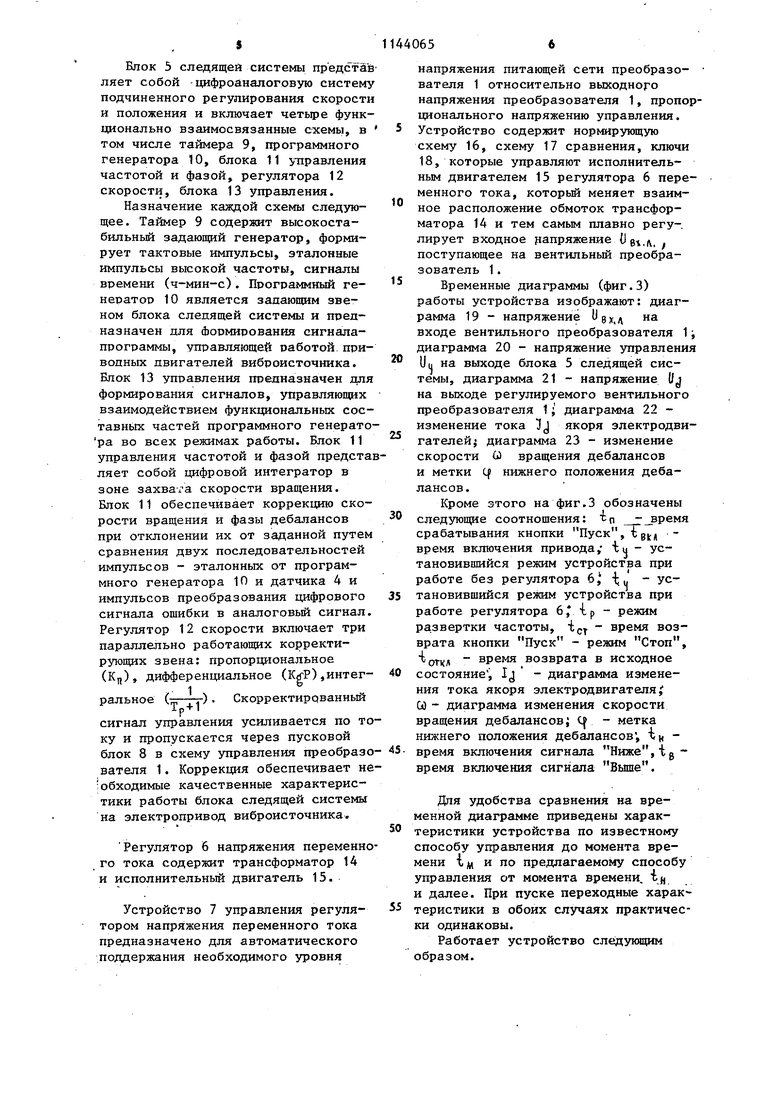
При углах регулирования близких к О также обеспечивается значительное уменьшение амплитуды переменной ЭДС ВП, что также реализуется введением в цепь питания ВП регулятора переменного напряжения и устройства автоматического управления им. На фиг.1 изображена структурная схема устройства, реализующего предлагаемый способj на фиг.2 - функциональная схема устройства управления электроприводом дебалансного виброисточника; на фиг.З - временные диаграммы работы устройства.
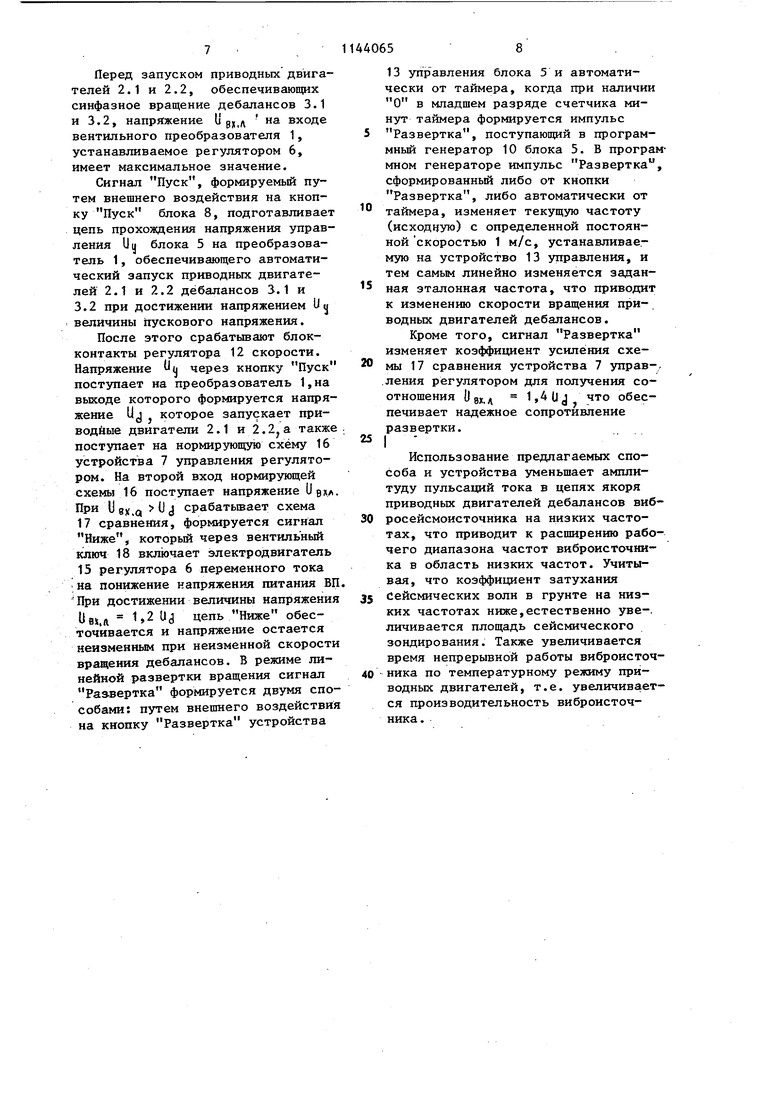
Устройство содержит вентильный преобразователь 1, приводные электрические двигатели 2.1 и 2.2, дебалансы 3.1 и 3.2, фотоэлектрический датчик 4 скорости вращения и положения дебалансов, блок 5 следящей системы, регулятор 6 напряжения переменного тока, устройство 7 управления регулятором, пусковой блок 8. Блок 5 следящей системы предста ляет собой цифроаналоговую систем подчиненного регулирования скорост и положения и включает четьфе функ ционально взаимосвязанные схемы, в том числе таймера 9, программного генератора 10, блока 11 управления частотой и фазой, регулятора 12 скорости, блока 13 управления. Назначение каждой схемы следующее. Таймер 9 содержит высокостабильньй задающий генератор, формирует тактовые импульсы, зталонные импульсы высокой частоты, сигналы времени (ч-мин-с). Программный генератор 10 является задающим звеном блока следящей системы и предназначен для формирования сигналапрограммы, управляющей работой.приводных двигателей виброисточника. Блок 13 управления тзедназначен для формирования сигналов, управляющих взаимодействием функциональных составных частей программного генерато ра во всех режимах работы. Блок 11 управления частотой и фазой предста ляет собой цифровой интегратор в зоне захвата скорости вращения. Блок 11 обеспечивает коррекцию скорости вращения и фазы дебалансов при отклонении их от заданной путем сравнения двух последовательностей импульсов - эталонных от программного генератора Ю и датчика 4 и импульсов преобразования цифрового сигнала ошибки в аналоговьй сигнал Регулятор 12 скорости включает три параллельно работающих корректирующих звена: пропорциональное (К), дифференциальное (),интегральное () . Скорректиррванный Тр + 1 сигнал управления усиливается по то ку и пропускается через пусковой блок 8 в схему управления преобразо вателя 1. Коррекция обеспечивает не обходимые качественные характеристики работы блока следящей системы на электропривод виброисточника. Регулятор 6 напряжения переменно го тока содержит трансформатор 14 и исполнительный двигатель 15. Устройство 7 управления регулятором напряжения переменного тока предназначено для автоматического поддержания необходимого уровня напряжения питающей сети преобразователя 1 относительно выходного напряжения преобразователя 1, пропорционального напряжению управления. Устройство содержит нормирующую схему 16, схему 17 сравнения, ключи 18, которые управляют исполнительным двигателем 15 регулятора б переменного тока, который меняет взаимное расположение обмоток трансформатора 14 и тем самым плавно регу-. лирует входное напряжение (J g. поступающее на вентильный преобразователь 1. Временные диаграммы (фиг.З) работы устройства изображают: диаграмма 19 - напряжение И ex.л входе вентильного преобразователя 1; диаграмма 20 - напряжение управления Uu на выходе блока 5 следящей системы, диаграмма 21 - напряжение i на выходе регулируемого вентильного преобразователя t; диаграмма 22 изменение тока 1 якоря электродвигателей j диаграмма 23 - изменение скорости О вращения дебалансов и метки Cf нижнего положения дебалансов. Кроме этого на фиг.З обозначены следующие соотношения: tn - время срабатывания кнопки nycK,tg|;j время включения привода/ t и установившийся режим устройства при работе без регулятора 6, - установившийся режим устройства при работе регулятора 6 Ip - режим ра звертки частоты, icr время возврата кнопки Пуск - режим Стоп, откл время возврата в исходное состояние Ij - диаграмма изменения тока якоря электродвигателя Си - диаграмма изменения скорости вращения дебалансов} С| - метка нижнего положения дебалансов, in время включения сигнала Ниже,рвремя включения сигнала Выше. Для удобства сравнения на временной диаграмме приведены характеристики устройства по известному способу управления до момента времени i |И и по предлагаемому способу управления от момента времени, ijj и далее. При пуске переходные характеристики в обоих случаях практически одинаковы. Работает устройство следующим образом.
Перед запуском приводных двигателей 2.1 и 2.2, обеспечивающих синфазное вращение дебалансов 3.1 и 3.2, напряжение U рц.д на входе вентильного преобразователя 1, устанавливаемое регулятором 6, имеет максимальное значение.
Сигнал Пуск, формируемый путем внешнего воздействия на кнопку Пуск блока 8, подготавливает цепь прохождения напряжения управления U|j блока 5 на преобразователь 1, обеспечивающего автоматический запуск приводных двигателей 2.1 и 2.2 дебалансов 3.1 и 3.2 при достижении напряжением U величины пускового напряжения.
После этого срабатывают блокконтакты регулятора 12 скорости. Напряжение {i через кнопку Пуск поступает на преобразователь 1,на выходе которого формируется напряжение Uj J которое запускает приводйые двигатели 2.1 и 2.2jа также поступает на нормирующую схему 16 устройства 7 управления регулятором. На второй вход нормирующей схемы 16 поступает напряжение Ugji/, При срабатьтает схема 17 сравнения, формируется сигнал Ниже, который через вентильный ключ 18 включает электродвигатель 15 регулятора 6 переменного тока на понижение напряжения питания ВЦ При достижении величины напряжения
Ueii.a Ь2 Uj цепь Ниже обесточивается и напряжение остается неизменным при неизменной скорости вращения дебалансов. В режиме линейной развертки вращения сигнал Раз-вертка формируется двумя способами: путем внешнего воздействия на кнопку Развертка устройства
13 управления блока 5 и автоматически от таймера, когда при наличии О в младшем разряде счетчика минут таймера формируется импульс 5 Развертка, поступающий в программный генератор 10 блока 5. В программном генераторе импульс Развертка, сформированный либо от кнопки Развертка, либо автоматически от
таймера, изменяет текущую частоту (исходную) с определенной постоянной скоростью 1 м/с, устанавливаемую на устройство 13 управления, и тем самым линейно изменяется заданная эталонная частота, что приводит к изменению скорости вращения приводных двигателей дебалансов.
Кроме того, сигнал Развертка изменяет коэффициент усиления схемы 17 сравнения устройства 7 управ-, ления регулятором для получения соотношения 1,4(jj что обеспечивает надежное сопротивление
развертки. 5 I Использование предлагаемых способа и устройства уменьшает амплитуду пульсаций тока в цепях якоря приводньк двигателей дебалансов виб0 росейсмоисточника на низких частотах, что приводит к расширению рабочего диапазона частот виброисточни- ка в область низких частот. Учитывая, что коэффициент затухания
5 Сейсмических волн в грунте на низких частотах ниже,естественно уве-. личивается площадь сейсмического зондирования. Также увеличивается время непрерывной работы виброисточ0 ника по температурному режиму приводных двигателей, т.е. увеличивается производительность виброисточника.
3.1
J2
4
| название | год | авторы | номер документа |
|---|---|---|---|
| Вибрационный сейсмический источник | 1989 |
|
SU1728823A1 |
| Вибрационная установка для снижения уровня напряжений и стабилизации размеров деталей и конструкций | 1982 |
|
SU1076465A1 |
| Электропривод вибратора | 1987 |
|
SU1550448A1 |
| Автоматизированный электропривод электромеханического центробежного вибромодуля | 1983 |
|
SU1124233A1 |
| Способ управления электроприводом постоянного тока механизма с пульсирующей нагрузккой на валу и устройство для его реализации | 1979 |
|
SU855909A1 |
| ВИБРОПЛОЩАДКА С ИЗМЕНЯЕМОЙ АМПЛИТУДОЙ КОЛЕБАНИЙ | 2002 |
|
RU2233738C2 |
| Электропривод перемещения механизма подачи станка | 1982 |
|
SU1115191A1 |
| Двухзонный вентильный электропривод | 1980 |
|
SU928578A1 |
| НЕРЕВЕРСИВНЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1989 |
|
RU2020714C1 |
| Вентильный электродвигатель | 1983 |
|
SU1141526A1 |


1. Способ управления электроприводом постоянного тока дебалансного виброисточника, в котором регулируют скорость вращения дебалансов изменением напряжения на якоре электропривода в функции заданной развертки частоты колебаний и ограничивают при этом максимальное значение тока якоря в функции постоянной времени регулятора скорости блока следящей системы, регулирующего величину напряжения на якоре двигателя, отличающийся тем, что, с целью расширения частотного диапазона дебалансного низкочастотного виброисточника, ограничивают напряжение на входе вентильного преобразователя в функции напряжения на его выходе и дополнительно регулируют скорость вращения дебалансов виброисточника путем линейного изменения частоты питания виброисточника. 2. Устройство для управления электроприводом постоянного тока дебалансного виброисточника, содержащее регулируемый вентильный преобразователь, подключенный к якорным обмоткам и обмоткам возбуждения электродвигателей, вал которых соединен с дебалансами и фото«Л электрическим датчиком, подключенным к блоку следящей системы, соединенному через пусковое устройство с входом управления преобразователя, отличающееся тем, что, с целью расширения частотного диапазона виброисточника, в 4i 4 него введены регулятор напряжения переменного тока и блок управления регулятором, первый вход которого соец;янен с выходом, регулятора и вхо9д дом вентильного преобразователя, :л второй вход подключен к выходу вентильного преобразователя, третий вход соединен с одним из выходов блока следящей системы, а выход соединен с входом управления регуля тора напряжения.
в
te./
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ отопления гретым воздухом | 1922 |
|
SU340A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ управления электроприводом постоянного тока механизма с пульсирующей нагрузккой на валу и устройство для его реализации | 1979 |
|
SU855909A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
