Изобретение относится к радиотехнике и может быть применено в радиосистемах локации, навигации и связи, использующих фазоманипулиро ванные псевдослучайные радиосигналы, фаза которых манипулирована на бинарной ПСП. Известен следящий фильтр сигнала с полайленной несущей, фаза которого манипулирована по закону ПСП, содержащий блок автоматической подстройки частоты и блок слежения за задержкой с некогерентным дискриминатором задержки, представ.ляющие собой: систему синхронизации с перекрестными связями , Однако использование указанного фильтра целесообразно в случае, если погрешность синхронизации по огибающей {сигналу модуляции) не превышает периода несущей частоты сигнала, В противномслучае в фильт ре наблюдаются аномальные ошибки слежения. Вероятность появления аномальных ошибок слежения за задер кой зависит от отношения сигнал/шум и от отношения ширины спектра фазоманипулированного псевдослучайного радиосигнала к его центральной частоте и становится недопустимо .большой при увеличении несущей частоты сигнала. , Наиболее близким к предлагаемому по технической сухцности является следящийфильтр фазоманипулированного псевдослучайного сигнала, содержащий блок АПЧ, состоящий из последовательно соединенных, смесителя, широкополосного усилителя, промежуточной частоты (УПЧ), перемножителя, узкополосного УПЧ, дискриминатора частоты, фильтра нижних частот (ФНЧ) и управляемого генератора, выход которого подключен к входу смесителя, блок слежения за задержкой, состоящий из последовательно соединенных дискриминатора задержки, перемножителя, другой вход которого подключен к другому выходу дискриминатора частоты блока АПЧ, ФНЧ, сумматора, другой, вход ксэторого через линейный преобразователь подключен к выходу ФНЧ блока АПЧ, управляемого генератора и формирователя опорной ПСП, первый выход которого подключен к втог рому входу перемножителя блока АПЧ а второйи третий выходы - к соот-. ветствующим входам дискриминатора задержки С23. Однако известное устройство обладает., недостаточной помехоустойчивостью. Гауссова аппроксимация в задаче нелинейного синтеза приводит лишь к асимптотически оптимальным структурам для высокой апостери орной то.чности. На практике допу1цение высокой апостериорной точности неприемлимо в переходном режиме, т.е. |1роцессе захвата сигнала, или; при недостаточно высоком отношении сигнал/шум. Действительно, априорные погрешности оценки задержки Г ,. получаемой,например, от устройства поиска и обнаружения, существенно больше апостериорные. В противном случае использование следящего фильтра не имеет смысла. Вследствие существенной разницы априорных. (t О} и апостериорных (t ) погрешностей оценки задержки эквивалентное отношение сигнал/шум в блюке АПЧ существенно хуже в переходном режиме (режиме захвата), чем в установившемся режиме. Эти энергетические потери, обусловленные значительными начальными погрешностями синхронизации по адержке, резко уменьшаю .вероятность захвата,, характеризующую помехозащищенность следящего фильтра в переходном режиме (режиме захвата);, Кроме того, вытекающая из синтеза устройства необходимость формирования произвол-, ной по времени от опорнохо сигнала . для реализации оптимального дискриминатора задержки моделируется фиксированной конечной разностью временных сдвигов опорных сигналов, реализуемой в двухканальном корреляционном дискриминаторе задержки. Временнаязадержка ,&±д между сдвинутыми копиями опорного сигнала определяет апертуру дискриминатора задержки и выбирается исходя из компромисса между условиями захвата сигнала и помехоустойчивостью устаг новившихся процессов слежения-. Поэтому значение .tj, не удовлетворяет критерию минимума вероятности захвата в переходном процессе после обнаружения сигнала. НеоптимальНость дискриминатора задержки тем больше, чем больше отношение априорной погрешности оценки задержки, определяющей размер, апэртуры дискриминатора задержки, к ее установившемуся апостериорному значению. Цель изобретения - повышение помехоустойчивости следящего фильтра. Поставленная цель достигается тем-, что в следящий фильтр фазоманипулированного псевдослучайного сигнала, содержащий блок автоматической подстройки частоты (АПЧ), состоящий из последовательно соединенных смесителя, широкополосного усилителя промежуточной частоты и перемножителя, последовательно соединенных узкополосного усилителя промежуточной частоты, дискриминатора частоты, фильтра нижних частот и управляегюго генератора.
выход которого подкл|очен к входу, смесителя, блок слежения за задержкой, состоящий из последовательно соединенных Дискриминатора задержки, перемножителя, другой.вход которого подключен к другому выходу дискриминатора частоты блока АПЧ, фильтра нижних частоТ;, сумматора, другой вход которого через линейный преобразователь подключен к ; выходу фильтра нижних частот блока АПЧ, управляемого генератора и формирователя опорной псевдослучайной последовательности (ПСП), первый выход которого подключен к второму вхрду перем ожителя блока АПЧ, введен блок управления, в блок АПЧ введен блок весового сумйирования, первый .информационный. вход которого соединен с выходом перемножителя, второй и третий информационные входы - с .соответст-; вующими выходами дискриминатора задержки , первый управлянлций вход с первым выходом блока управления, второйи третий управляющие входы объединены и соединены с вторым вы ходом блока управления, а выход с входом узкополосного усилителя промежуточной частоты в блок ележения за задержкой введен блок регулируемой задержки, входы которого подключены к второму и третьему выходам формирователя опорной ПСП, управляющие входы - к второму выходу блока управления, а выходы - к COOTветстаумдам входам дискриминатора задержки.
Кроме того, блок управления содержит последовательно включенные RS-триггер, элемент И и счетчик
:ИМПУЛЬ.СОВ, ПРЯМОЙ ВЫХОД КОТОРОГО
подключен через элемент. ИЛИ к R-BXOду RS-триггера и является вторым в(лходом блока управления,. первым выходом которого является инверснйй выход счетчика импульсов, при этом вход установки нуля счетчика импульсов объединен с вторым входом элемента ИЛИ и является входом установки нуля блока управления, второй вход элемента И - входом сигнила опорной частоты, а s-вход RS-триггера -.входом, сигнала включения режима слежения, :
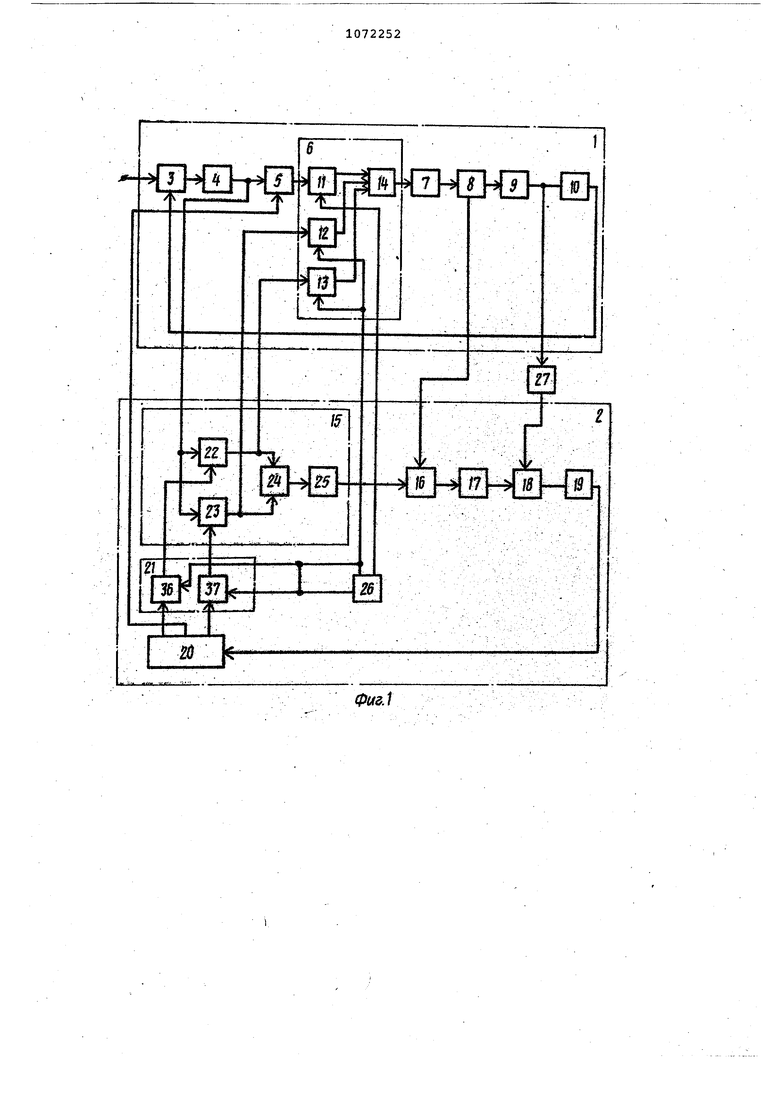
На фиг, 1 представлена структурная электрическая схема -следящего фильтра фазоманипулированного псевг дослучайного сигнала/ на фиг,. 2 - V структурная электрическая схейа блока управления/ на фиг, 3 структурная электрическая схема блока регулируемой задержки.
Следящий фильтр фазоманипулированного псевдослучайного сигнала {фиг, 1) содержит блок 1 АПЧ и . блок 2 слежения за згщержкой. Блок 1 АПЧ состоит из соединенных в кольцо смесителя 3, широкополосного УПЧ 4,перемножителя 5, блока б.весового суммирования, узкополрсного УПЧ 7, дискриминатора 8 чаЬтбты, ФНЧ 9 и управляемого генератора io. Блок б весового суммирования состоит из элементов 11-13 с управляемыми коэффициентами передачи, выходы которых объединены сумматором 14, Блок 2 слежения за::, задержкой состоит из соединенных в кольцо дискри0минатора 15 задержки, перемножителя 16, ФНЧ 17, сумматора 18, управляемого генератора 19, формирователя 20 опорной ПСП и блока 21 регулируемой задержки. Дискриминатор 15 задержки состоит, например, из двух перемножителей 22 и 23, выходы Которых через вычит тель 24 под:ключены к входу узкополосного УПЧ . 25. Фильтр содержит также блок 26 .. управления, первый выхрд которого подключен к управляющему входу элемента 11, второй выхОд - к управляю-, щим входам элементов 12 и 13 и к управляющим входам блока 21 регу5лируемой задержки. При этом выход щcкpиминaтopa 8 частоты соединен с другим входом перемножителя 16, выход ФНЧ 9 через линейный преобразователь 27 с вторым входом сум-0матора 18, выход формирователя 20 опорной ПСП - с вторым входом перемножителя 5, выход цшрокополосного УПЧ 4 - с входами перемножителей 22 и 23, другие входы которых пЪд- ключ1ены к выходам блока 21 регулируемой задержки, а выходы - к информационным входам элементов 12 и 13,
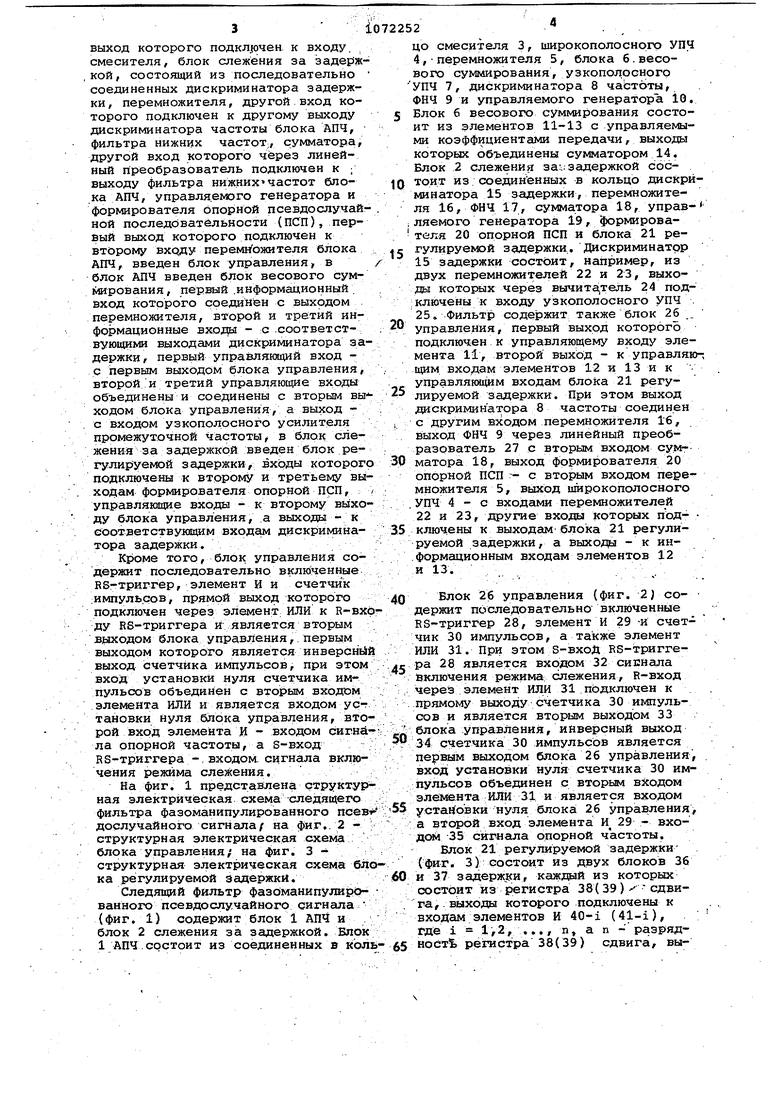
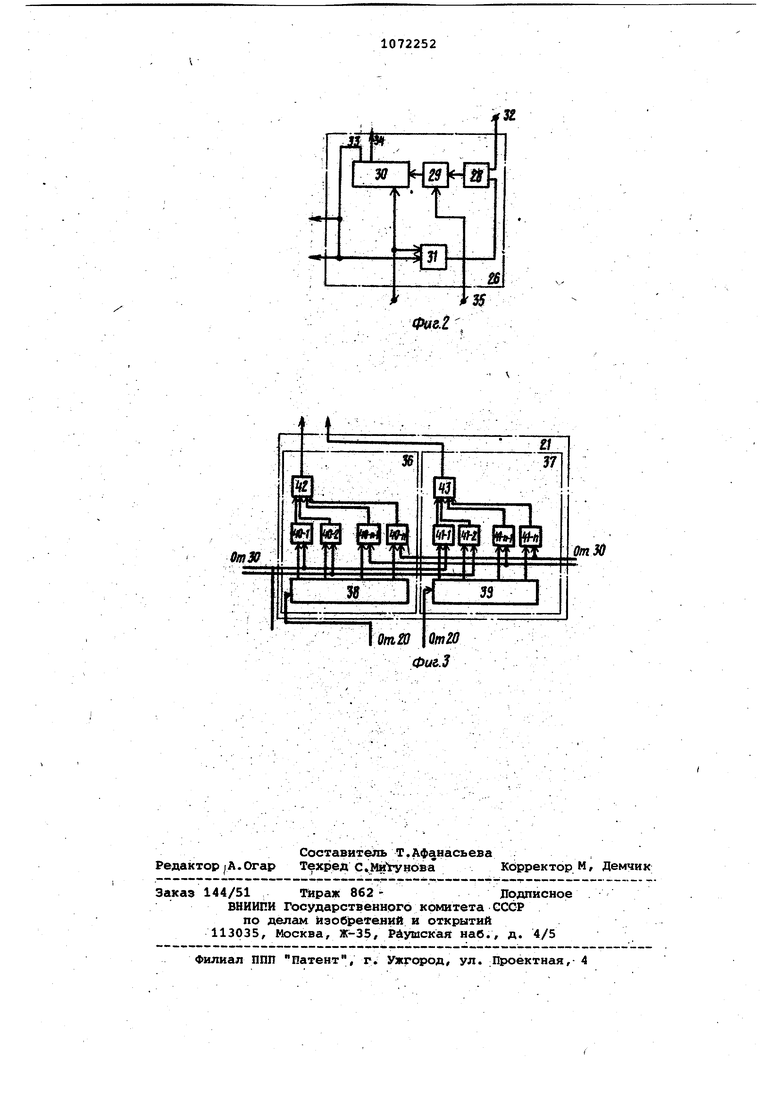
Блок 26 управления (фи г, 2) соержит последовательно включенные RS-триггер 28, элемент И 29 -и счетчик 30 импульсов, а также элемент ИЛИ 31, При этом S-вхоД RS-триггера 28 является входом 32 сигнала
включения режима слежения, R-вход через элемент ИЛИ 31.подключен к . прямому выходу счетчика 30 импульсов и является вторым выходом 33 блока Управления, инверсный выход 34 счетчика 30 импульсов является первым выходом блока 26 управления, вход установки нуля счетчика 30 импульсов объединен с вторым входом элемента ИЛИ 31 и является входом
усхайовки нуля блока 26 управления, а второй вход элемента И 29 - вхоЯО1Л 35 сигнала опорной частоты.
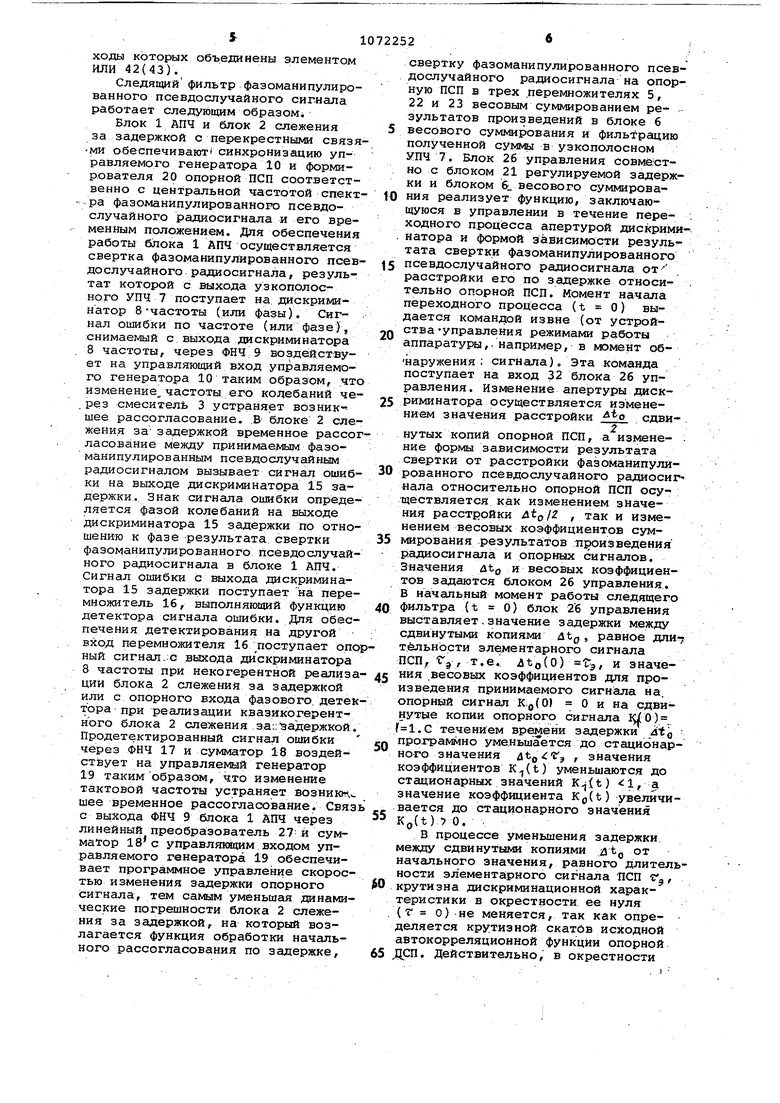
Блок 21 регулируемой задержки (фиг, 3) состоит из двух блоков 36
и 37 задерж и, каждаай из которых
состоит из регистра 38 {39) сдвига,.выходы которого подключены к входам элементов И 40-i (41-i), ;
где i 1/2,
,,, n, а n - разрядностЬ peiracTpa 38(39) сдвига, выходы которых объединены элементом ИЛИ 42(43).
Следяцщй фильтр фазоманипулированного псевдослучайного сигнала работает следующим образом
Блок 1 АПЧ и блок 2 слежения за задержкой с перекрестными связями обеспечивают синхронизацию управляемого генератора 10 и формирователя 20 опорной ПСП соответственно с центральной частотой спектра фазоманипулированноро псевдослучайного радиосигнала и его временным положением. Для обеспечения работы блока 1 АПЧ осуществляется свертка фазоманипулированного псевдослучайного радиосигнала, результат которой с выхода узкополосного УПЧ 7 поступает на дискриминатор 8-частоты (или фазы). Сигнал ошибки по частоте (или фазе), снимаемый с выхода дискриминатора 8 частоты, через ФНЧ 9 воздействует на управляющий вход управляемого генератора 10 таким образом, что изменение, частоты его колебаний че. рез смеситель 3 устраняет возник шее рассогласование. .В блоке 2 слежения за задержкой временное рассогласование между принимаемым фазоманипулированным псевдослучайным радиосигналом вызывает сигнал ошибки на выходе дискриминатора 15 задержки. Знак сигнала ошибки определяется фазой колебаний на выходе дискриминатора 15 задержки по отношению к фазе результата свертки фазоманипулированного псевдослучайного радиосигнала в блоке 1 АПЧ. Сигнал ошибки с выхода дискриминатора 15 задержки поступает на перемножитель 16, выполняющий функцию детектора сигнала ошибки. Для обеспечения детектирования на другой вход перемножителя 16 поступает опоный сигнал.:с выхода дискриминатора 8 частоты при некогерентной реализации блока 2 слежения за задержкой или с опорного входа фазового, детектора при реализации квазикогерентного блока 2 слежения за:: задержкой. Продетектированный сигнал ошибки через ФНЧ 17 и сумматор 18 воздействует на управляемый генератор 19 такимобразом, что изменение тактовой частоты устраняет возниюп шее звременное рассогласование. Связ с выхода ФНЧ 9 блока 1 АПЧ через линейный преобразователь 27- и сумматор leс управлякнцим входом управляемого генератора 19 обеспечивает программное управление скоростью изменения задержки опорного сигнала, тем самым уменьшая динамические погрешности блока 2 слежения за задержкой, на который возлагается функция обработки начального рассогласования по задержке.
свертку фазоманипулированного псевдослучайного радиосигнала на опорную ПСП в трех перемножителях 5, 22 и 23 весовым суммированием результатов произведений в блоке 6 весового суммирования и фильтрацию полученной суммы в узкополосном УПЧ 7. Блок 26 управления совместно с блоком 21 регулируемой задержки и блоком & весового суммирования реализует функцию, заключающуюся в управлении в течение переходного процесса апертурой дискрими натора и формой зависимости результата свертки фазоманипулированного псевдослучайного радиосигнала от расстройки его по задержке относительно опорной ПСП. Момент начала переходного процесса (t О) выдается командой извне (от устройства управления режимами работы аппаратуры,-например, в момент обнаружения : сигнала). Эта команда поступает на вход 32 блока 26 управления. Изменение апертуры дискриминатора осуществляется изменением значения расстройки о сдвинутых копий опорной ПСП, а изменение формы зависимости результата свертки от расстройки фазо1манипулйрованного псевдослучайного радиосиг нала относительно опорной ПСП осуществляется как изменением значения расстройки / / ТЭК и изменением весовых коэффициентов суммирования результатов произведения радиосигнала и опорных сигналов. Значения At(j и весовых коэффициентов задаются блоком 26 управления. В начальный момент работы следящего фильтра (t б) блок 26 управления выставляет.значение задержки между сдвинутыми копиями dtp, равное дли т.ёльности элементарного сигнала ПСП, tr, т.е. to(0) -t-, и значения .весовых коэффициентов для произведения принимаемого сигнала на. опорный сигнал Kijj{0) О и на сдвинутые копии опорного сигнала ) . С течением времени задержки про-граммно уменьшается до стационарного значения , значения коэффициентов K(t) уменьшаются до стационарных значений ) 1, а значение коэффициента K(,(t) увеличивается до стационарного значения K,(t) 0.
в процессе уменьшения задержки между сдвинутыми копиями .St, от начального значения, равного длителности элементарного сигнала ЛСП Г , крутизна дискриминационной характеристики в окрестности ее нуля (f 0) не меняется, так как определяется крутизной скатов исходной автокорреляционной функции опорной ДСП, Действительно, в окрестности « О дискриминационная характёри A.(..-«.) где Ад - амплитуда сигнала при VE г О, R(C) - значение нормированной автокорреляционной; функции ПСП так как нормированная втокорреляционная функция nCnR(f) 1-1 . - . . - . .- , . ..- э ,: при fTJ 4tj . Однако при уменьшении .at JJ уменьшается и протяженность лиг нейного участка да1скриминедионнрй ; характеристики. Если иэменение ээ держки Ato(t) между сдвинутыми копиями опорного сигнгша произв т ся не быстро/ т.е. таким образом, что погрешность, оценки задержки сигнала блокрм 2 слежения за задержкой не превышает.линейного участка даскриминационной характеристики, то парамеТр1Ы блока ,2 сЯе жения за задержкой, связанные с его динамикой (динамическая погре( нЬсть, длительность перекодногр пррдесса, при отсутствий в нём нелинейностей не изменяются. Одйакр шумовая составляющая norffesiah нрсти блока 2 слежения м.еньше; чем в прототипе, причем тем меньше, чем меньше задержка между сдвинутыми копиями опорного сигнала. Это увеличение.точности слежения обус ловлено уменьшёни-ем уровня шума ; на :выходе дискриминатора 15 задёрж1сИ при уменьшении временной рас стройки между сдвинутыми копиями опорного сигнала. Действительно, при значениях этой расстройки меньших, чем длительность элементарного символа , шумовые составляющие на выходе перемножихелей 22 и 23 дискриминатора;. 15 задержки крррег лированы с положительным коэффициентом корреляции г. По определению коэффициент корреляции .- .,., ....,; ,(t)Xg(t|) . V .-;- -v/v где X {t|t{h(tJ4S{t) - реализацня шума на BbixoAGi перемноиси теля 22/ / At V теля , г((t)fS(tnc( - Реализа / ция шума на выходе перемножи теля 23; n(t) - реализаци шума на .. : 8 .,... сигнальных входах перемножите -, . , лей 22 -и . . ;. ; - : S (t) - реализация фаз Рманипули-рованного псевдослучайногррадаосиг. ;; :: ,. ; . . нала на . , входе диcкpIШИнaтoра 15 за держки/U(t)- опорная бинарная ncii .г / , 6jt)±r)i мГп%) - дисперсия/ (мощностьj шума соответствующего процесса/) 1 , так как Uj,(t) 1 1; M|J -: символ операции математичес , кого ожидания (усредненияпо реали3 ациям}.. MHtOR(tJ 2 -. «(4). RCf) - нормированная автокорреляционная функция опорной ПСП. ощность шума на выходе вычита. 24 : -,( 2.f((utJJ. ак Как в пределах (Г/ i С, R Т) Ь..6 ледовательно, уровень на де дискриминатора 15 Задержки ьшается за счет вычитания этих елированных составляющих в вычиле 24. Таким образом, разрешапротиворечие мезвду широкой турой ди.окримина трра 15 заки для .обеспечения нормальных вий захвата сигнала и высокой остью в установившемся режиме, Рвательнр, при одинаковой ционности шумовые сост.авляющие ешностей в предлагаемом фиЛьтре ше, чем в прототипе, что свидетельствует о повышении помехоустойчивости в становившемся режиме Кинимальное значение временной , At{,(t) определяется предельно дос жимьм апостериорным законом распре деления погрешностей Wp5 ) а именно: максимальные значения погрешности с высокой вероятностью не должны выходить за пр делы линейног6 участка дискриминационной характеристики. В против ном случае в блоке 2 начинают про являться пороговые эффекты и шумовые составляющие погрешности слеже ния начинают возрастать. Кроме того, минимальное значение Ato не должно превышать длительность фазо вых переходов ( длительность фронтов фазоманипулированного псевдослучайного радиосигнала, которые имеют конечную длительность у реал ных сигналов. Формирование гармонического сиг нала для работы блока 1 АЦЧ осуществляется путем суммирования.в блоке 6 результатов перемножения фазоманипулированного ПСевдослу- чайного радиосигнала в трех перемножителях 5, 22 и 23 с опорной пеп и ее .сдвинутыми кОПИ51МЙ и посл дующей фильтрации результата произ ведения в узкополосвом УПЧ 7., Шэт му сигнал на выходе, узкополосного УПЧ 7 определяется выражением .Лпч№ Н(о-%).; .где.- . . . ..:. / V)4f,{tH (tM{r)+K(iIAT4--f-i|; A(T) ApRt-e); , АО - амплитуда сигнала, ,(t:) - нормированная. aBTOKOiJpeляционная ф нкция/ К (t) - весовой коэффициент для произведения принимаемого сигнала на сдвинутые копии опорного сигнала Ai. (ti.t К : (t) - весовой коэффициент для прЮизведения принимаемого сигнала на опорный сигнал , t) J - временная задержка между сдвинутыми копиями опорного / ; сигнала. . : ;. Таким образом, зависимость ампл туды получаемого на выходе узкопо лосного УПЧ 7 гармоническозЬс сигна ла от погрешности оценки задержки Т в блоке 2 в предлагаемом техническом решении может быть мен шей, чем в прототипе. Блок. 26 уп равления управляя значениями задержки сдвинутых копий сигнала ilto(t) и значениями весовых коэффициентов ) и Ko(t) (реализуемых в элементах 11, 12 и 13 с управляемыми коэффициентами передачи соответственно), может обеспечить оптимальное значение отношения сигнал/шум для работы блока 1 АПЧ при изменении во времени апостериорного закона распределения вероятностей погрешности оценки задержки WpglC, t) в блоке 2 от начального (априорного -до установившегося (стационарного) распределения вероятностей VfJ.f) . В начальный момент работы системы (), 26 управления, выставляя значения весовых коэффициентов К(0) 1 и Кр(0)0, обеспечивает максимально широкую функцию взаимной корреляции входного и опорного сигналов , определяющую амплитуду сигнала на выходе узкополосного УНЧ 7. Тем самым увеличивается вероятность захвата сигнала блока 1 АПЧ . при значительных априорных погрешностях оценки задержки и уменьшают ся потери на детектирование сигнала ошибки в блоке 2. С течением времени блок 26 управления программно .уменьшает коэффициент К,Н) и увеличивает Кjj(t), поддерживая оптимальную форму функции взаимной Корреляции входного и опорного сигналов при эволюци.и. апостериорного закона распределения вероятностей погрешности оценки задержки/ . Критерий оптимальности с течением времени меняется от критерия максимума вероятности захвата в начальный момент работы следящего фильтра при наихудших условиях синхронизации по задержке до критерия мак симума среднего отношения сигне1л/шум на выходе узкополосного УПЧ 7 при усреднении по стационарному апостериорному закону распределения погрешностей задержки.. Таким образом, в установившемся режиме значения К (t) ;-и Ко 11) определяются из условия : ,ut,/C) ) rftV l -oo ((),6|)at . где.А(К-,Кд, . ) -амплитуда сигнала на выходе узкополосногоУПЧ 7,(K.KO. -дисперсия шума на выходе узкополосногоУПЧ 7f W N(0,6-5. ) - нормальная - аппроксимация стадйонарного апо териорного ра епределёния веройтностей погрешностиоценки задержки f . Таким .образом увеличивается noMie хоустойчивость следящего фильтра . как в переходном режиме 1при захват .сигнала, так ив установившемся СОСТОЯНИИ:. . .. . Блок 26 управления выполнен в ви счетчика 30 импульсов времени пе-. реходного процесса со стартстопным управлением счетными импульсами (RS-триггёр 28, элемент И 29). Состояние определенного раэря-. да счетчика 30 импульсов управ ляет задержкой между сдвинутыми ко ПИЯМИ опорной ПСП d t и значениями весовых коэффициентов К и K.J,Таким образом, формируемый код управления является одноразрядным и принимает всего два значения и 1. При этом К и Кд также да принимают значения О и f т.е. осуществляется разрешение прохождения сигнала на вход сумматора 14 или апирание входа. Поэтому элемент. 11, .12 и 13 с управл емыми коэффициентами передачи мо- : гут ;бнть выполнены в виде управляемых вентилей, пропускающих или не пропусканвдих на выход входной сигнал. Блок 21 регулируемой задержки выполнен-в виде двух блоков 36 и 37 задержки, каждый из которых состоит из регистра 38 (39Г сдвига, с отводами, коммутация которых рсувдествляется элементами И 40-i 1--f) (функция а п с v b;n CJ a,bсигналы с отводом регистра сдвига 38 C39lj t - управляющий сигнал) по сигналу, от счетчика 30 импульсов переходного процесса. Аппроксимация функций A,f(f, t) иг.Гу, t) осуществляется следуйщим образрм: АЛЯ 4tg tj;lc K K.fj.f( ДА ; КрМ . Таким образом, до момента t имеют место широкая апертура дискримйнатора 15 задержки и широкая область сильной корреляции входного фазоманипулированного псевдослучайного сигнала с опорными для работы блока 1 АПЧ и после момента -ц происходит сужение дискриминационной . характеристики и областей силь ной корреляции, что обеспечи 9ает: повышение помехоустойчивости предлагаемого фильтра по сравнению с прототипом. . При применении изобретения в радиосистемах передачи дискретной информации повышается качество синхррнизации передаваемой информации и тем сак|ым уменьшается вероятность ошибок в принимаемых информационных символах,так как качество синхронизации имеет в ряде случа.ев существенное значение. Кроме тогоI использование предлагаемого фильтра в совмещенЕшх измери.тельно-информационных системах системах радиолокации и радионавигации, использующих фазоманипулированные псевдослу- . чайны0 радиосигналы, позволяет увеличить помехоустойчиврсть аппаратуда как в режиме захвата, так ив режиме сопровождения { слежения). Уменьшение шумовых составляющих измерения заде|)жки сигналов особенно важно в радионавигационных сис-. Teriaxj так как точность измерения координат и параметров движения В этих системах связана с погрешностями измерения первичныхрадионавигационных параметров (задерж- . ки, дюплеровбкого сдвига частоты и др.{через геометрический фактор, зкачительно увеличивающий влияние этих погрешностей.
/
Ф1иг.2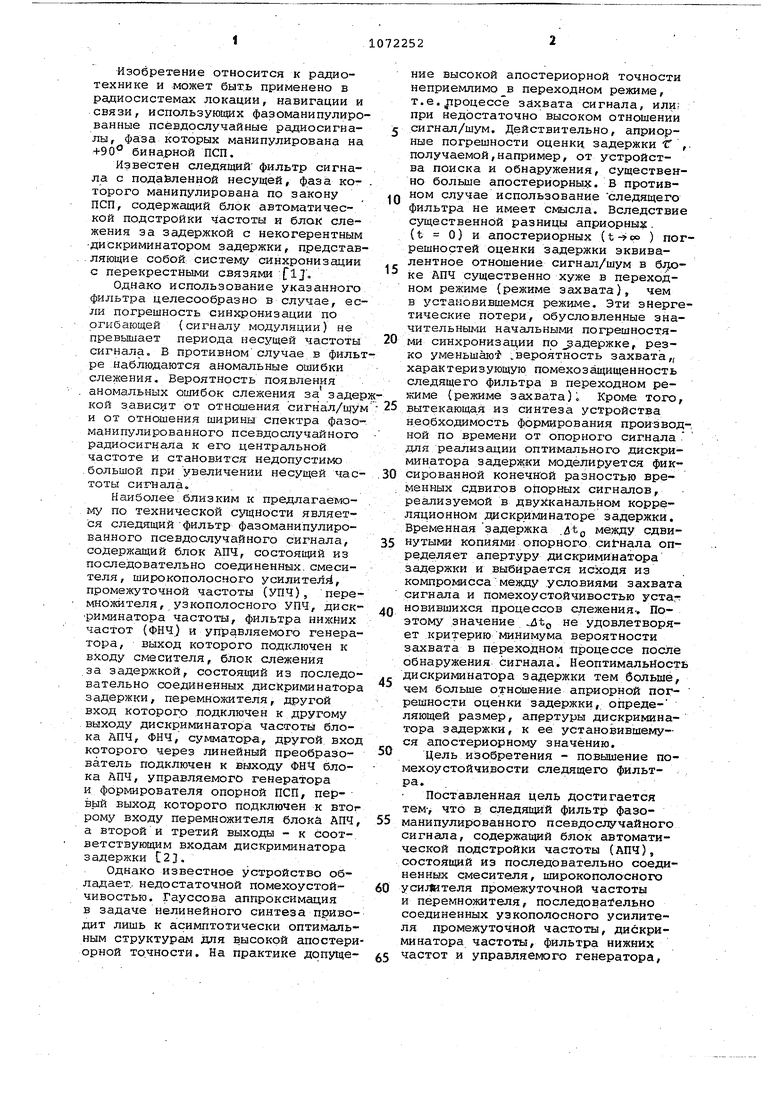


| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий фильтр фазоманипулированного псевдослучайного сигнала | 1986 |
|
SU1394411A1 |
| Следящий фильтр для обработки фазоманипулированного псевдослучайного радиосигнала | 1985 |
|
SU1370793A1 |
| Устройство для корреляционного приема фазоманипулированных псевдослучайных сигналов | 1984 |
|
SU1252964A1 |
| Корреляционный приемник сложных фазоманипулированных сигналов | 1981 |
|
SU1046943A1 |
| Способ формирования фазоманипулированного сигнала с использованием дополнительной бинарной фазовой манипуляции | 2024 |
|
RU2837584C1 |
| Способ расширения спектра сигналов | 2019 |
|
RU2714300C1 |
| ЦИФРОВОЙ МОДЕМ КОМАНДНОЙ РАДИОЛИНИИ ЦМ КРЛ | 2013 |
|
RU2548173C2 |
| КВАЗИОПТИМАЛЬНЫЙ ПРИЕМНИК ДИСКРЕТНО-НЕПРЕРЫВНЫХ ФАЗОМАНИПУЛИРОВАННЫХ СИГНАЛОВ | 2005 |
|
RU2300173C1 |
| УСТРОЙСТВО ДЛЯ ПРИЕМА ШУМОПОДОБНЫХ СИГНАЛОВ | 1992 |
|
RU2097925C1 |
| Устройство для корреляционного приема сложных фазоманипулированных сигналов | 1982 |
|
SU1075438A2 |
1. СЛЕДЯЩИЙ ФИЛЬТР ФАЗОМА.НИПУЛИРОВАННОГО ПСЕВДОСЛУЧАЙНОГО СИГНАЛА, содержащий блок автоматической подстройки частоты (АПЧ), состоящий из последовательно соединен-, ных.смесителя, широкополосного уси- лителя.промежуточной частоты и пёремножителя, последовательно соедивенных узкополосного усилителя npoi- л межуточной частоты, дискриминатора частоты, фильтра нижних частот/и управляемого генератора, выход которого подключен к входу смесителя, блок слежения за задержкой, состоя- . щий. из последовательно соединенных: : дискриминатора задержки, перемножителя, другой вход которого подклю-. чен к другому, выходу дискриминато- ; , - ра частоты блока фильтра ниж- них частот, суш1атора, другой вход ;:. которого через линейный преобразова-. тель подключен к выходу фильтра ниж- них частот блока АПЧ, управляемого .- . генератора и формирователя опорной . псевдослучайной последовательности .(ПСП), первый выход .которого подключен к второму входу перемножи- : теля блока АПЧ, отличающий-, с я тем, что, с целью повышения помехоустойчивости, в него введен блок управления, в блок АПЧ введен блок весового суммирования, первый информационный вход которого соединен с выходом перемножителя, второй и третий информацнонные входы с соотвеокзтвующими выходами дискри-гминатора задержки, первый управляющий вход - с первым вьаходом блока управления, второй и третий управляющие входы объединены и соединены с вторым выходом, блока управления, а вуход - с входом узкополосного усилителя промежуточной частоты, в блок слежения за задержкой введен блок регулируемой задержки, 8 входы которого подключены к второму и третьему выходам, формироватеW ля опорной ПСИ, управляющие входы к второму .выходу блока управления, а выходи - к соответствующим входам дискриминатора задержки. 2, Фильтр по п, 1, о т л ич а ю щ и и с я тем, что блок управления содержит последовательно включенные. R5- триггер, -элемент Ни счетчик импульсов, прямой -выход которого подключен через элемент ИЛИ к R-входу RS -триггера и яв- I ляется вторым выходом блока управ.л1енйя, первым выходом которого является инверсный выход счетчика км пульсов, при этом вход установки нуля счетчика импульсов объединен i :с вторым входом элемента ИЛИ и яв ляется входом установки нуля блока управления,, второ.й вход элемента И-входом сигнсша опорной частоты, а RS -триггера - входом сигнала включения режима слежения.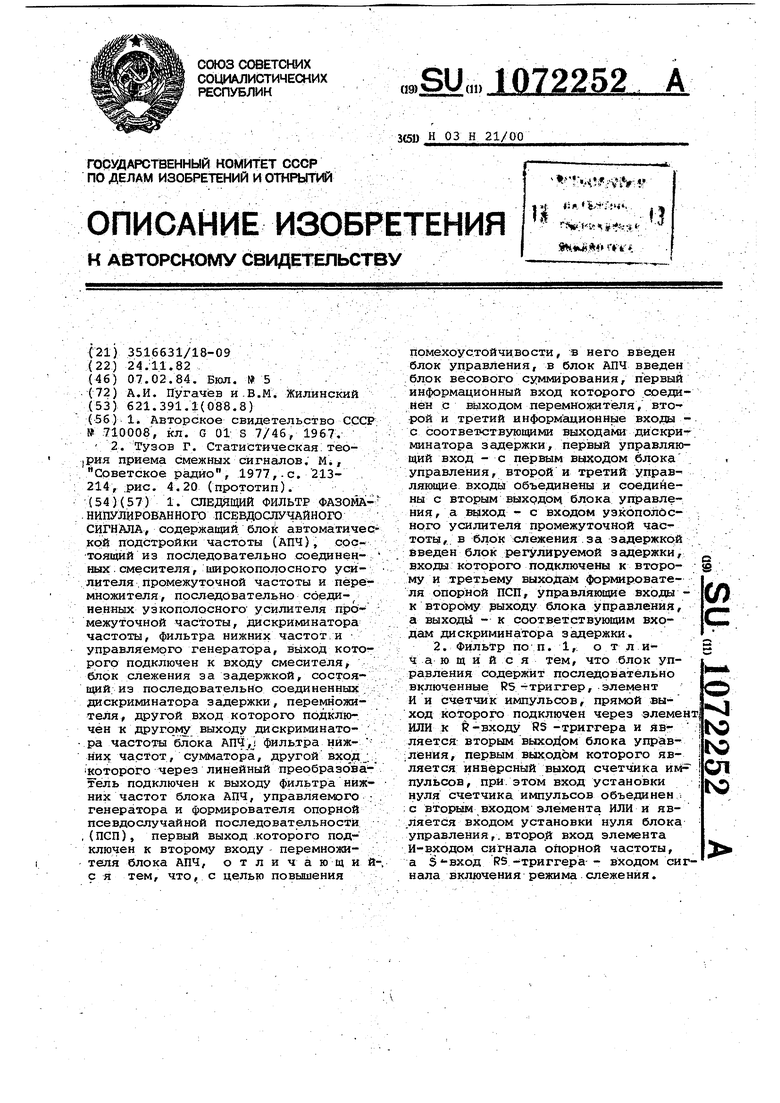
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Следящий фильтр для некогерентной обработки сигнала с подавленной несущей фаза которого манипулирована по закону бинарной псевдослучайной последовательности | 1967 |
|
SU710008A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Тузов Г | |||
| Статистическая: тео- (Рия приема смежных сигналов | |||
| Mi, Срветское радио, 1977,-с | |||
| Кулиса для фотографических трансформаторов и увеличительных аппаратов | 1921 |
|
SU213A1 |
| Устройство для вытяжки и скручивания ровницы | 1923 |
|
SU214A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
