Изобретение относится к электротехнике и может быть использовано в электроприводах переменного тока на основе асинхронного двигателя с фазным ротором, в основном для крановых механизмов подъема и передвижения, требующих получения пониженных (ползучих) скоростей.
Известен способ управления (SU 646800, 15.04.1980), при котором фактические напряжения ротора преобразуют в опорные напряжения пилообразной формы с постоянными амплитудами и длительностью, равной половине периода напряжения ротора. При фазовом управлении пульсации момента получаются минимальными.
Известно устройство (SU 646800, 15.04.1980), содержащее асинхронный двигатель, трехфазный трансформатор, формирователь пилообразного напряжения, задатчик интенсивности, схему сравнения, управление формирователем импульсов, тиристорную силовую схему, балластный резистор, пороговое устройство, шунтирующее устройство.
Однако при этом способе исчезает эффект параметрической стабилизации скорости и техническое исполнение получается очень сложным.
Наиболее близким к изобретению и принятым за прототип является способ управления асинхронным двигателем с фазным ротором (патент RU 2202850, МПК 7 Н02Р 5/40, опубликован 20.04.2003. Бюл. №11). Способ основан на получении эффекта параметрической стабилизации скорости при ограничении пульсаций момента.
Однако при этом способе сложная форма опорного напряжения не обеспечивает равномерное изменение угла регулирования при увеличении нагрузки, что приводит к нелинейным механическим характеристикам при регулировании скорости и ограничивает величину момента значениями меньшими, чем возможно в схеме с включенными импедансами.
В основу изобретения положена техническая задача, заключающаяся в исключении импульсного режима регулирования скорости и повышении жесткости механической характеристики за счет линейности пилообразного напряжения ("пилы"). Так как "пила" линейная, то обеспечивается линейность механических характеристик при регулировании скорости. Повышается жесткость механических характеристик.
Указанная техническая задача решается тем, что в способе управления асинхронным двигателем с фазным ротором, при котором устанавливают задающее напряжение для тиристора или симистора каждого контура цепи фазного ротора, затем формируют опорное напряжение и сравнивают его с задающим и, когда опорное напряжение превышает задающее, включают тиристор или симистор каждого контура цепи фазного ротора, согласно изобретению опорное напряжение формируют суммированием напряжения обратной связи и пилообразного напряжения, формируемого при положительной полуволне линейного напряжения на кольцах ротора.
Для осуществления способа предлагается устройство управления асинхронным двигателем с фазным ротором. Устройство содержит импедансы в каждой фазе ротора, тиристоры или симисторы, замыкающие в треугольник выходы импедансов, подключенные к напряжению на кольцах ротора трансформаторы с вторичными обмотками, блоки сравнения и управления тиристорами или симисторами, выходы которых соединены с тиристорами или симисторами ротора, отличается тем, что в него введены блок формирования обратной связи, блоки выделения положительного напряжения, блоки формирования пилообразного напряжения, сумматоры и блок задания, при этом одна из обмоток трансформатора каждой фазы ротора соединена с блоком формирования обратной связи, выход которого соединен с блоками формирования пилообразного напряжения и сумматором в каждой фазе ротора, другие вторичные обмотки трансформатора соединены с блоками выделения положительного напряжения в каждой фазе ротора, выходы которых соединены с блоками формирования пилообразного напряжения в каждой фазе ротора, соединенными с сумматорами, выходы которых совместно с выходом блока задания соединены с блоками сравнения и управления тиристорами или симисторами в каждой фазе ротора.
Особенностью способа является формирование пилообразного напряжения для управления каждым тиристором или симистором, которая обеспечивает максимальный угол открытия тиристоров или симистором до 180°, а напряжение обратной связи, приподнимающее эту "пилу" в процессе увеличения нагрузки на валу двигателя, приводит к резкому и линейному изменению угла открытия тиристоров или симисторов, повышая существенно жесткость механической характеристики, а при больших нагрузках полностью открывает тиристоры или симисторы, обеспечивая выход на характеристику с импедансами, соединенными накоротко в звезду. В аналоге для полного открытия тиристоров или симисторов необходимо значительное падение скорости и поэтому привод никогда не выходит на естественную дроссельную характеристику, а сама характеристика имеет существенную нелинейность, особенно при больших нагрузках.
Сущность изобретения поясняется чертежами, где
на фиг.1 представлена схема электропривода, реализующего способ и устройство управления асинхронным двигателем с фазным ротором,
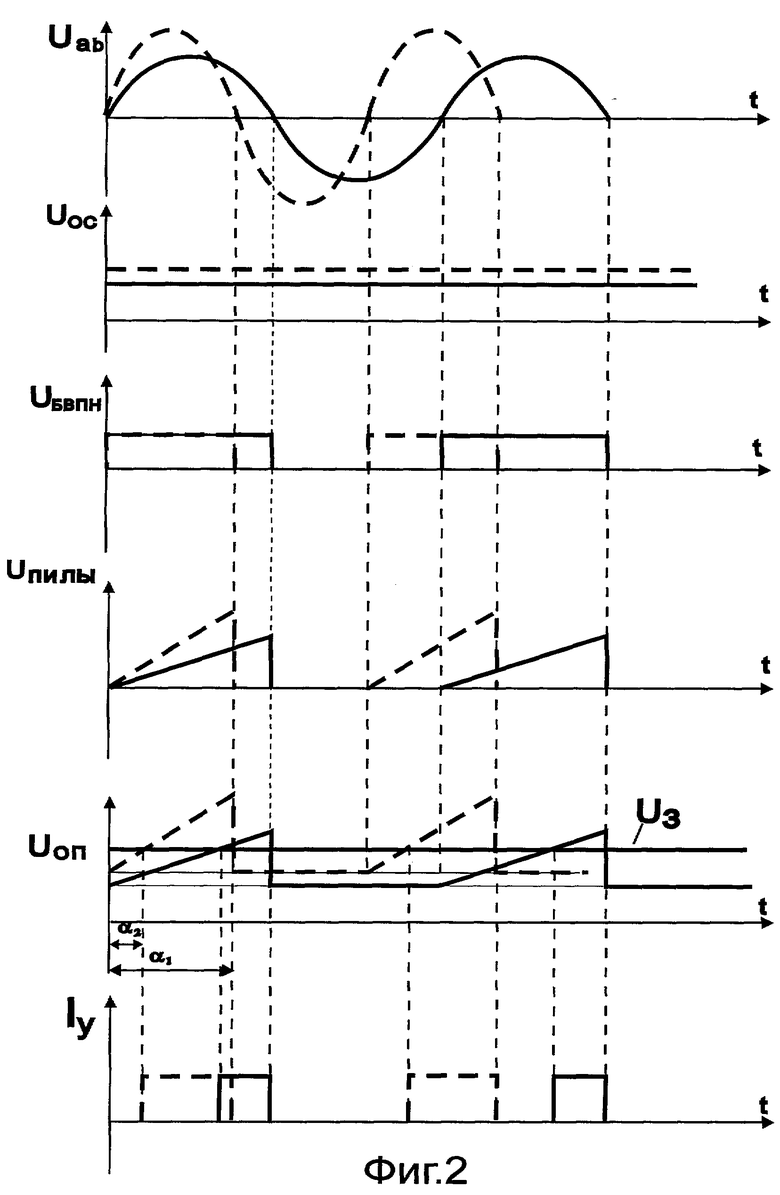
на фиг.2 - диаграммы, поясняющие работу формирователя опорного напряжения, при разных статических моментах, выполненного по схеме фиг.1, где Uab - синусоидальное напряжение на выходе обмотки трансформатора, UБВПН - напряжение на выходе блока выделения положительного напряжения, UОС - напряжение на выходе блока обратной связи, UПИЛЫ - напряжение на выходе блока формирователя пилообразного напряжения, UОП - суммирование напряжения UПИЛЫ и UОС и сравнение с задающим напряжением UЗ, IУ - ток управляющего электрода тиристора или симистора;
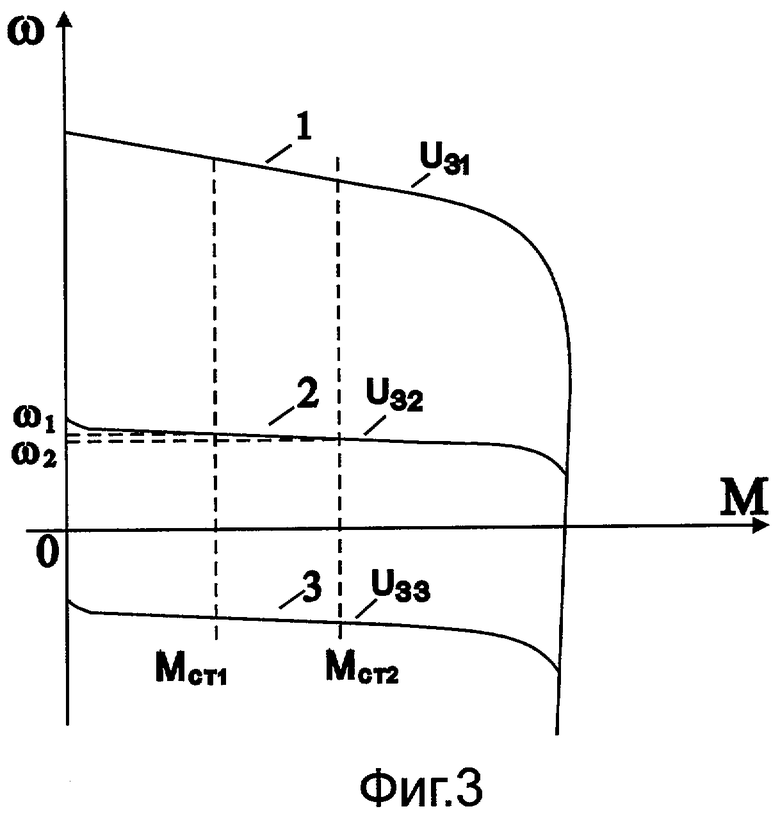
на фиг.3 - механические характеристики, при этом характеристика 1 соответствует схеме с импедансами, соединенными накоротко в звезду, характеристика 2 соответствует пониженной скорости в двигательном режиме, характеристика 3 соответствует пониженной скорости в режиме торможения противовключением.
Устройство, реализующее способ, включает асинхронный двигатель 1 с фазным ротором, импедансы 2 в виде индуктивностей с массивными сердечниками и тиристоры или симисторы 3 в цепи ротора, блок формирования обратной связи (БФОС) 4, блоки выделения положительной полуволны (БВПП) 5, обмотки трансформаторов 6, подключенные к напряжению на кольцах ротора, блоки формирования пилообразного напряжения (БФП) 7, сумматоры 8, блоки сравнения и управления тиристором или симистором (БСУТ) 9, блок задания (БЗ) 10. Выходы блоков 9 подключены к управляющему выводу и катоду соответствующего тиристора или симистора 3.
Осуществление способа поясняется при рассмотрении работы заявляемого устройства.
Пояснения работы схемы по формированию управляющих импульсов даны на диаграммах фиг.2.
Принцип работы управления тиристорами или симисторами достаточно пояснить на примере управления одним из тиристоров или симистором. На фиг.2 показаны диаграммы управления тиристором или симистором, подключенным между фазами А и В ротора электродвигателя при разных статических моментах.
К напряжению на кольцах ротора электродвигателя 1 подключены понижающие трансформаторы TVab, TVbc, TVca (фиг.1). Каждый трансформатор имеет как минимум по две включенные обмотки, которые условно названы как первая и вторая обмотки. Первые вторичные обмотки трансформаторов подключены к блоку 4 БФОС, который представляет собой выпрямитель с фильтром на выходе. Выходное напряжение UОС блока 4 БФОС используется как обратная связь по напряжению на кольцах ротора. Вторые вторичные обмотки трансформаторов 6 подключены к блокам 5 БВПН своей фазы. Блок БВПН представляет собой компаратор. Его выходное напряжение UБВПН прямоугольной формы появляется лишь при положительной полярности напряжения на его входе. В рассматриваемом случае (фиг.2) на его вход подается напряжение Uab второй вторичной обмотки трансформатора 6 TVab. Пилообразное напряжение UПИЛЫ для каждой фазы формируется своим блоком 7 БФП, который представляет собой интегратор, на вход которого подается напряжение обратной связи UОС. Интегрирование возможно лишь при наличии напряжения на выходе блока 6 БВПН своей фазы, т.е. в конечном счете, в течение всей положительной полуволны напряжения на управляемом тиристоре или симисторе 3. Сумматор 8 формирует на своем выходе опорное напряжение UОП. Оно складывается из напряжения обратной связи UОС и напряжения UПИЛЫ своей фазы. Блок 9 БСУТ сравнивают задающее напряжение скорости, поступающее с блока задания 10 БЗ. Точка пересечения задающего напряжения с напряжением опорным определяет угол α задержки включения тиристора или симистора. Когда задающее напряжение превышает напряжение UОП, по цепи управляющий электрод - катод управляемого тиристора или симистора протекает ток управления IУ. На холостом ходу электродвигателя работает практически "макушка" напряжения UОП и угол α близок к 180°. При увеличении статического момента МСТ (нагрузки) на валу электродвигателя его скорость уменьшается, что приводит к увеличению напряжения на кольцах ротора, а следовательно, к увеличению UОС. На фиг.2 показаны UОП и углы открытия тиристора или симистора при разных значениях МСТ на валу. Сплошной линией представлена зависимость UОП при МСТ1, а штриховой линией при МСТ2>MСТ1. Видно, что с увеличением нагрузки, а следовательно, при снижении скорости электродвигателя увеличивается как UОС, так и темп нарастания "пилы". Это приводит к существенному изменению (уменьшению) угла открытия тиристора или симистора α и, следовательно, к увеличению электромагнитного момента электродвигателя, поддерживающего скорость электродвигателя в пределах заданного значения. При дальнейшем увеличении нагрузки UОС становится больше задающего напряжения. Это приводит к полному открытию тиристоров или симисторов, что равносильно замыканию звезды импедансов накоротко.
На фиг.3 представлены механические характеристики рассматриваемого электропривода. Характеристика 1 соответствует случаю полностью открытых тиристоров или симисторов, т.е. при замкнутой звезде тиристоров или симисторов накоротко. Характеристика 2 соответствует работе электропривода на пониженной скорости в двигательном режиме, а характеристика 3 - работе двигателя в режиме торможения противовключением. В результате стабилизирующего действия рассматриваемого способа управления механическая характеристика более жесткая, чем характеристика 1. При больших значениях статического момента тиристор или симистор полностью открывается, и характеристика совпадает с характеристикой 1. Благодаря линейности пилы механические характеристики имеют линейный характер. В аналоге опорные напряжения формируется из кусков синусоид и потому линейность механических характеристик не может иметь места. Кроме того, у аналога при росте амплитуды опорной синусоиды угол α уменьшается, но стать равным нулю не может и достичь максимально возможного значения электромагнитного момента, ограниченного характеристикой 1, не может.
Схема фиг.1 успешно испытана в лаборатории на электродвигателе 3.5 кВт и на кранах разной грузоподъемности промышленных предприятий.
Особенность изобретения заключается в том, что опорное напряжение, формируемое в прототипе из кусков синусоид, заменяется опорным пилообразным напряжением, состоящим из напряжения обратной связи (выпрямленного напряжения с колец ротора) и линейно-нарастающего напряжения ("пилы"), темп нарастания которого формируется напряжением обратной связи в течение положительного роторного напряжения.
Реализация предлагаемого способа позволит создать простые, доступные неквалифицированному обслуживанию электроприводы, преимущественно крановых механизмов, с получением ползучих скоростей при малых пульсациях момента.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ФАЗНЫМ РОТОРОМ | 2006 |
|
RU2311724C1 |
| СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ С ФАЗНЫМ РОТОРОМ | 1999 |
|
RU2202850C2 |
| Устройство для регулирования частоты вращения асинхронного двигателя с фазным ротором | 1985 |
|
SU1339856A1 |
| Устройство для регулирования скорости трехфазного асинхронного двигателя с фазным ротором | 1982 |
|
SU1116515A2 |
| Устройство для регулирования скорости трехфазного асинхронного двигателя с фазным ротором | 1977 |
|
SU758453A1 |
| ПУСКОВОЕ УСТРОЙСТВО БЕСКОНТАКТНЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ ПЕРЕМЕННОГО ТОКА | 2011 |
|
RU2461117C1 |
| ЭЛЕКТРИЧЕСКИЙ ПРИВОД ПЕРЕМЕННОГО ТОКА | 1992 |
|
RU2025037C1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ МОМЕНТА МАХОВИЧНОГО ДВУХФАЗНОГО АСИНХРОННОГО ДВИГАТЕЛЯ ТОЧНОЙ СИСТЕМЫ УПРАВЛЕНИЯ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ | 1968 |
|
SU1840055A1 |
| Устройство для регулирования числа оборотов трехфазного асинхронного электродвигателя | 1979 |
|
SU783939A1 |
| Электропривод с однофазным питанием многофазного асинхронного электродвигателя | 1977 |
|
SU692040A1 |
Изобретение относится к области электротехники и может быть использовано в электроприводах переменного тока на основе асинхронного двигателя с фазным ротором, в основном для крановых механизмов подъема и передвижения, требующих получения пониженных (ползучих) скоростей. Технический результат заключается в получении эффекта параметрической стабилизации скорости при ограничении пульсаций момента. В способе и устройстве управления асинхронным двигателем с фазным ротором момент включения тиристоров или симисторов определяют путем сравнения задающего и опорного напряжений и включают тиристоры или симисторы в определяемые таким образом моменты времени. Для каждого тиристора или симистора момент включения определяют независимо от остальных. Отдельное опорное напряжение каждого тиристора формируют из фактических напряжений в силовой цепи путем их суммирования. В роторную цепь асинхронного двигателя с фазным ротором введены импедансы, выходы которых замкнуты тиристорами или симисторами в треугольник, трансформаторы с вторичными обмотками, блоки сравнения и управления тиристорами или симисторами, блок формирования обратной связи, блоки выделения положительного напряжения, блоки формирования пилообразного напряжения, сумматоры и блок задания. 2 н.п. ф-лы, 3 ил.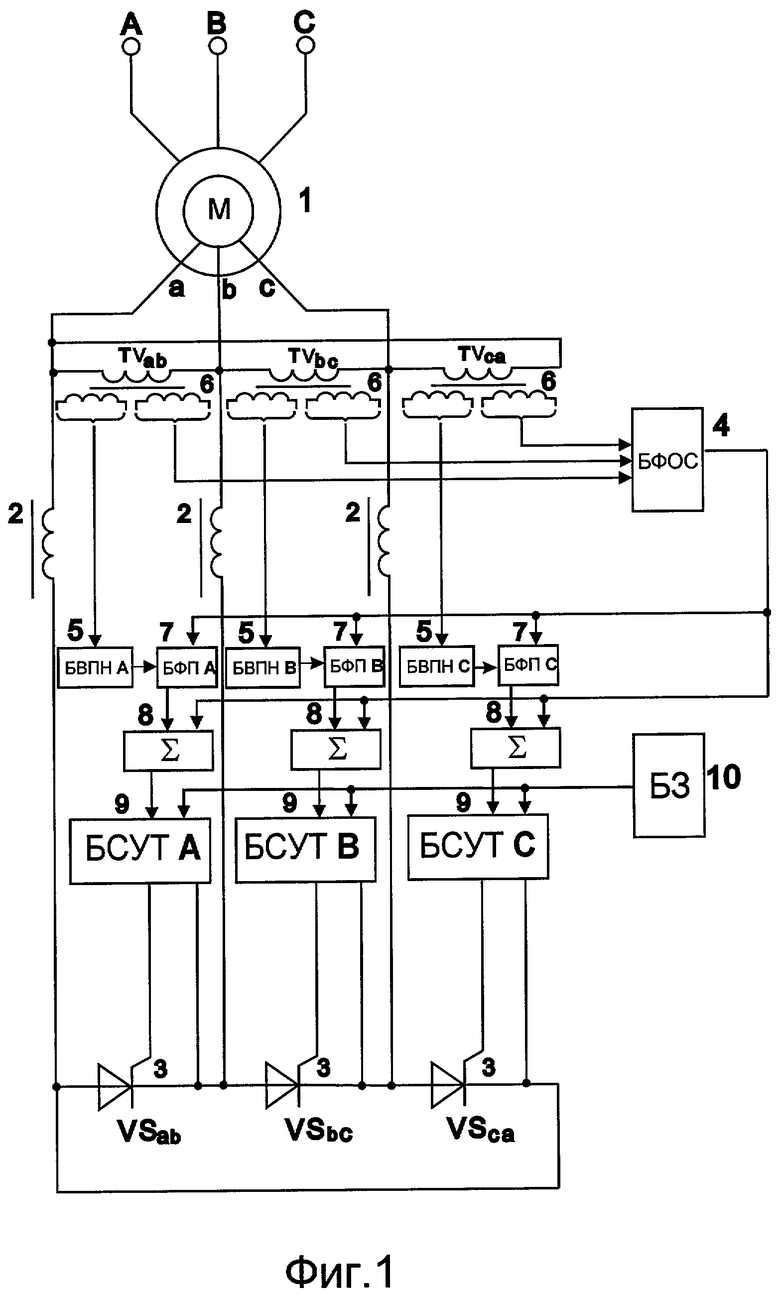
| СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ С ФАЗНЫМ РОТОРОМ | 1999 |
|
RU2202850C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ТРЕХФАЗНЫМ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ФАЗНЫМ РОТОРОМ | 1991 |
|
RU2056699C1 |
| RU 2002359 C1, 30.10.1993 | |||
| Способ управления асинхронным двигателем | 1979 |
|
SU860253A1 |
| Способ управления асинхронным электродвигателем с фазным ротором и устройство для его осуществления | 1976 |
|
SU646800A1 |
| Электропривод переменного тока | 1988 |
|
SU1539952A1 |
| GB 1207042 A, 30.09.1970 | |||
| US 4721898 A, 26.01.1988 | |||
| FR 21300935 A, 10.11.1972 | |||
| DE 8806692 A, 07.07.1988. | |||

