Известны устройства для разгрузки опор, удерживающих вращающиеся оси подвижных систем измерительных приборов, в которых использован магнитный подвес подвижной системы, выполненный в виде постоянного магнита либо электромагнита, пеподвижно установленного над подвижной системой, спабл енной деталью из магнитного материала. Воздействуя на деталь, магнит притягивает ее вверх, уменьшая давление копца оси подвижной системы на подпятники прибора.
Особепностью описываемого устройства является устранение погрешности показаний, вызванной наклоном прибора. Это достигается тем, что магнит свободно установлен на шарнирном подвесе, ось вращения которого совпадает с осью вращения прибора, для сохранения положения магнита на одной вертикали с осью подвижной системы прибора нри наклоне последнего.
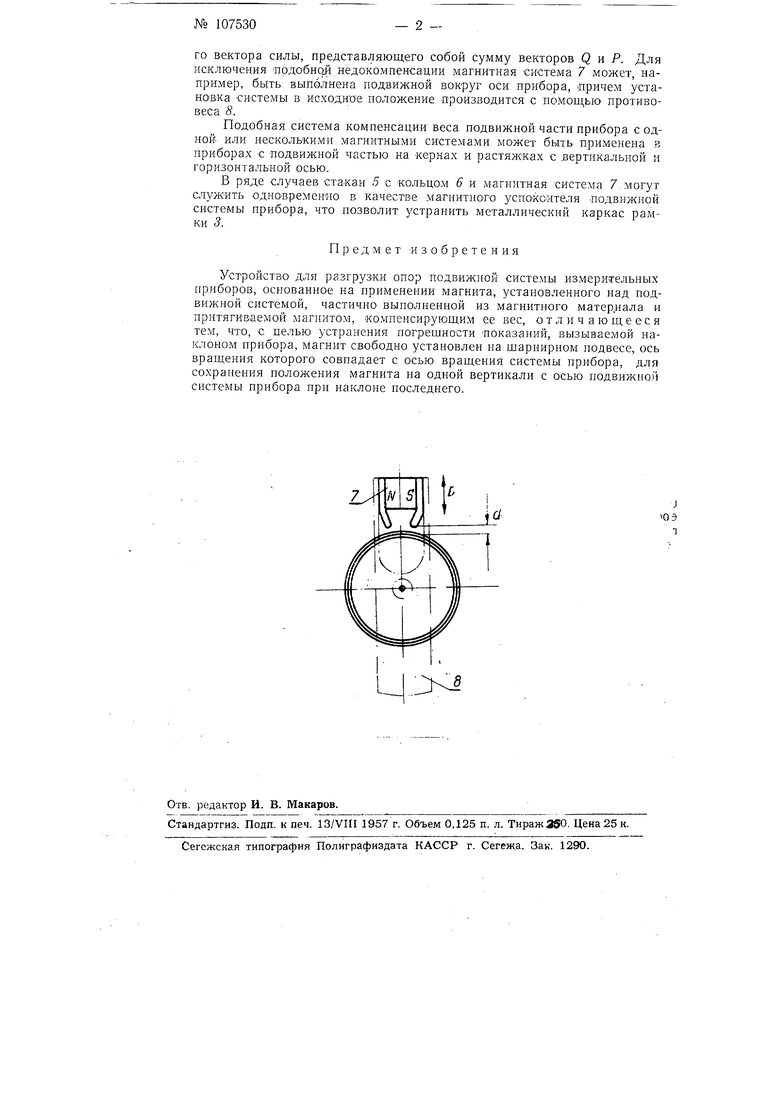
На чертеже в двух проекциях изображено схематически предложенное устройство применительно к поибору с подвижной системой на растяжках.
Ось 1 подвижной системы прибора магнитоэлектричеоко-го типа укреплена на растяжках 2-2. На оси прибора укреплена рамка с обмоткой 5 и указатель 4. Остальные узлы и детали прибора на схеме ire приведены. На оси также укреплен легкий, стакан 5, внутри которого по окружности помещено кольцо 6 из магнитномягкого материала. Над кольцом установлен постоянный магнит 7, полюса которого расположены у поверхности кольца 6 с небольшим зазором d.
Направление оси подвижной системы отмечено стрелкой. Сила веса компенсируется силой п-ритяжения магнита, направленной проривоположно -весу ПОДВИЖНОЙ системы в направлении стрелки Р.
Желательно, чтобы сила Р была расположена на линии центра тяжести подвижной части. Регулировка величины силы производится за счет изменения зазора d перемещением магнитной системы 7 вдоль стрелки Б.
Нри установке прибора, например, на корабле может иметь место наклон Прибора до 45°. В случае наклона прибора в плоскости Щкалы возникает значительная погрешность за счет ноявления результирующего вектора силы, представляющего собой сумму векторов Q и Р. Для исключения ПодобноД недокомпенсации магнитная система 7 может, например, быть выполнена подвижной вокруг оси прибора, причем установка системы в ИСходиОе положение производится с помощью противовеса 8.
Подобная система компенсации веса подвижной части прибора с одной, или несколькими магнитными системами может быть применена в приборах € подвижной частью на кернах и растяжках с .вертикальной и горизонтальной осью.
В ряде случаев стакан 5 с кольцом 6 и магнитная система 7 могут служить одновременно в качестве магнитного ЗспОКСИтеля .подвижной системы прибора, что позволит устранить металлический каркас рам.ки 3.
Предмет изобретения
Устройство для разгрузки опор подвижной системы измерительных приборов, основанное на применении магнита, установленного над подвижной системой, частично выполненной из магнитного материала и притягиваемой магнитом, компенсирующим ее вес, отличающееся тем, что, с целью устранения погрешности показаний, вызываемой наклоном прибора, магнит свободно установлен на шарнирном подвесе, ось вращения которого совпадает с осью вращения системы прибора, для сохранения положения магнита на одной вертикали с осью подвижно)) системы прибора при наклоне последнего.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТОМЕТР | 1970 |
|
SU278141A1 |
| Гироскопический чувствительный элемент для навигационных приборов | 1946 |
|
SU71053A1 |
| Стационарный гравиметр | 1976 |
|
SU661478A1 |
| КОМПЕНСАЦИОННЫЙ МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР | 2013 |
|
RU2559154C2 |
| Устройство крепления подвижной части электромеханического прибора | 1981 |
|
SU991311A1 |
| КОЛЕСО НА МАГНИТНОЙ ПОДУШКЕ | 2010 |
|
RU2431573C1 |
| РАСХОДОМЕР-СЧЕТЧИК ГАЗА ИЛИ ЖИДКОСТИ (ЕГО ВАРИАНТЫ) | 1993 |
|
RU2097705C1 |
| РЕГУЛИРУЕМЫЙ МАГНИТНЫЙ ПОДВЕС ТРАНСПОРТНОГО СРЕДСТВА С КОРРЕКЦИЕЙ ПОДЪЕМНОЙ СИЛЫ | 2015 |
|
RU2611858C1 |
| Электрический измерительный прибор | 1935 |
|
SU48784A1 |
| МАНОМЕТРИЧЕСКИЙ СПОСОБ ИЗМЕРЕНИЯ И ВОСПРОИЗВЕДЕНИЯ МАЛЫХ ДАВЛЕНИЙ ПОРШНЕВОЙ ПАРОЙ, ОБРАЗОВАННОЙ СТРУКТУРНО-СОПРЯЖЕННЫМИ МАГНЕТИКАМИ (ВАРИАНТЫ) | 2011 |
|
RU2489692C1 |
юэ т
ц::
