(Л
С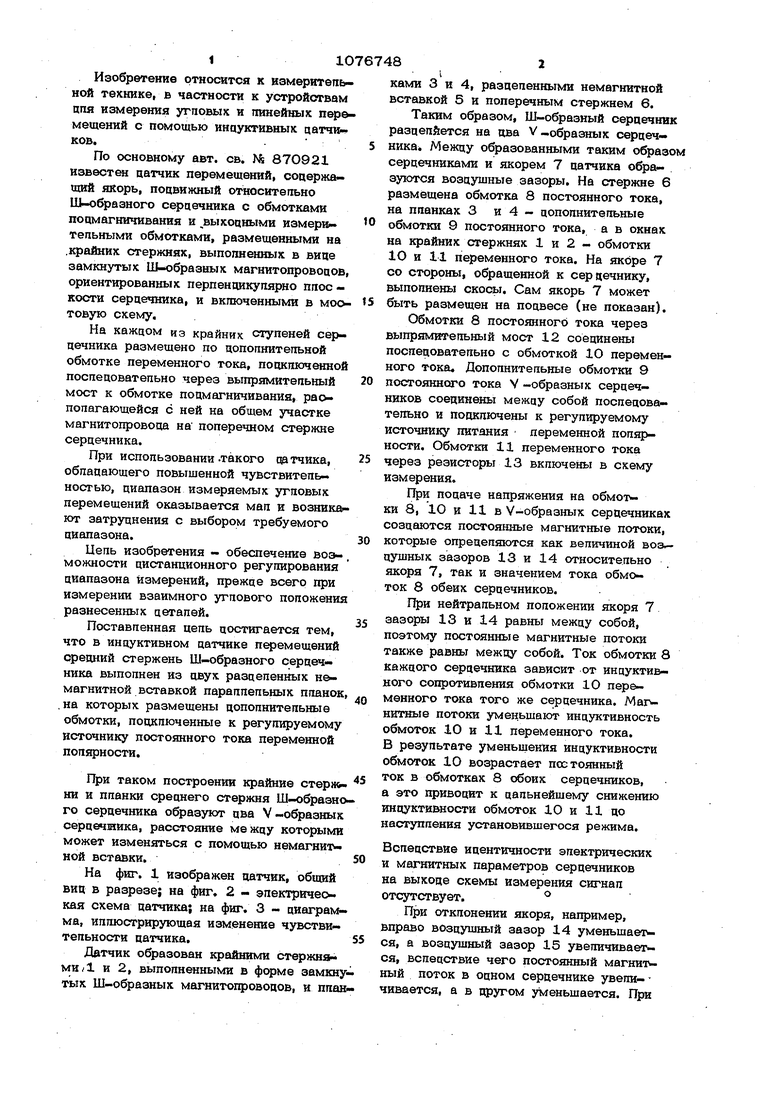
| название | год | авторы | номер документа |
|---|---|---|---|
| Дифференциальный индуктивный преобразователь перемещений | 1980 |
|
SU937991A1 |
| Магнитная система индукционногоуСКОРиТЕля | 1977 |
|
SU639393A1 |
| Индуктивный датчик перемещений | 1979 |
|
SU870921A1 |
| Устройство для контроля и измерения конечных перемещений поршня домкрата | 1986 |
|
SU1409757A1 |
| Устройство для измерения положения оси сварного стыка | 1980 |
|
SU899294A1 |
| Устройство для контроля положения рабочих органов механизмов | 1982 |
|
SU1023374A1 |
| Устройство для защиты от перегрузки электродвигателя постоянного тока | 1980 |
|
SU951541A1 |
| Электромагнитный двигатель с возвратно-поступательным движением | 1934 |
|
SU95014A1 |
| Электрический генератор | 1981 |
|
SU1037381A2 |
| Устройство для контроля и измерения конечных перемещений поршня домкрата горной машины | 1986 |
|
SU1416704A1 |
ИНДУКТИВНЫЙ ДАТЧИК ПЕРЕМЕЩЕНИЙ по авт. св. Na 870921, отличающийся тем, что, с цепью цистанционного регупировання циапазона измерений, прежце всего цпя измерения взаимного углового |юпоженяя разнесенных цетапей, срецний Ш-образного сераечника выпопнен из цвугс разцепенных немагнитной вставкой параппепьных ппанок, на которых раэмешены попопнитепьные обмопш, поо кпюченные к регулируемому всточнвку постоянного тока переменной попярностн.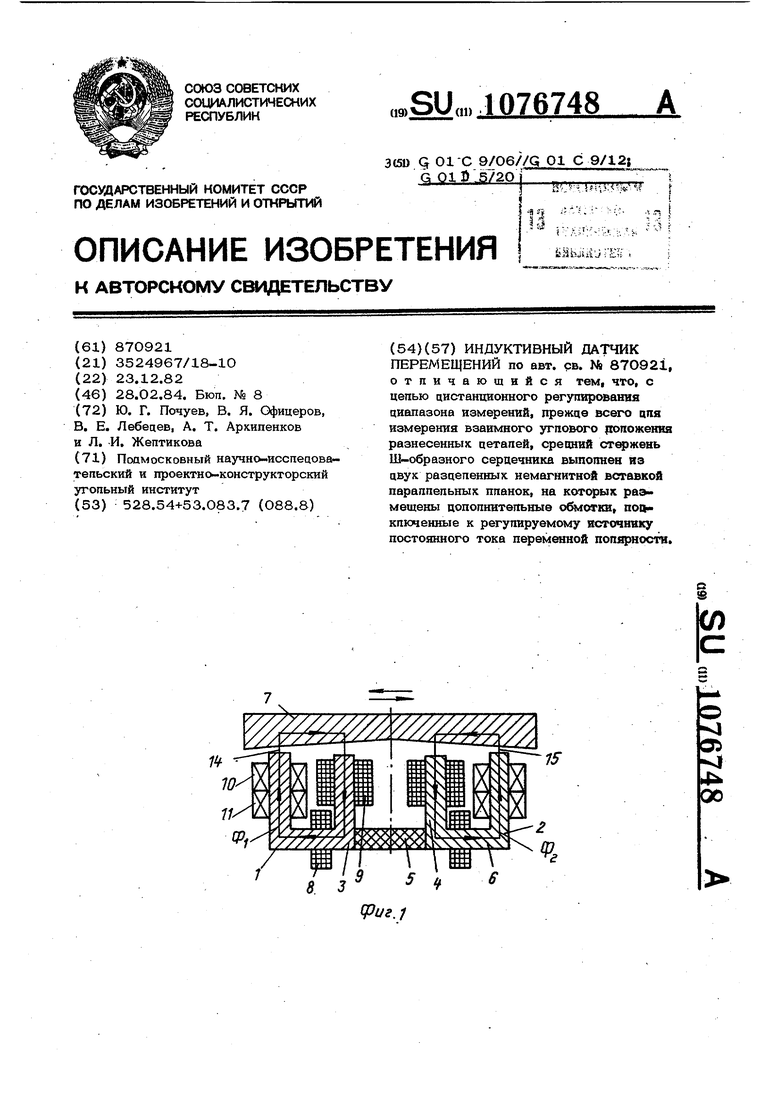
о: 41 N(
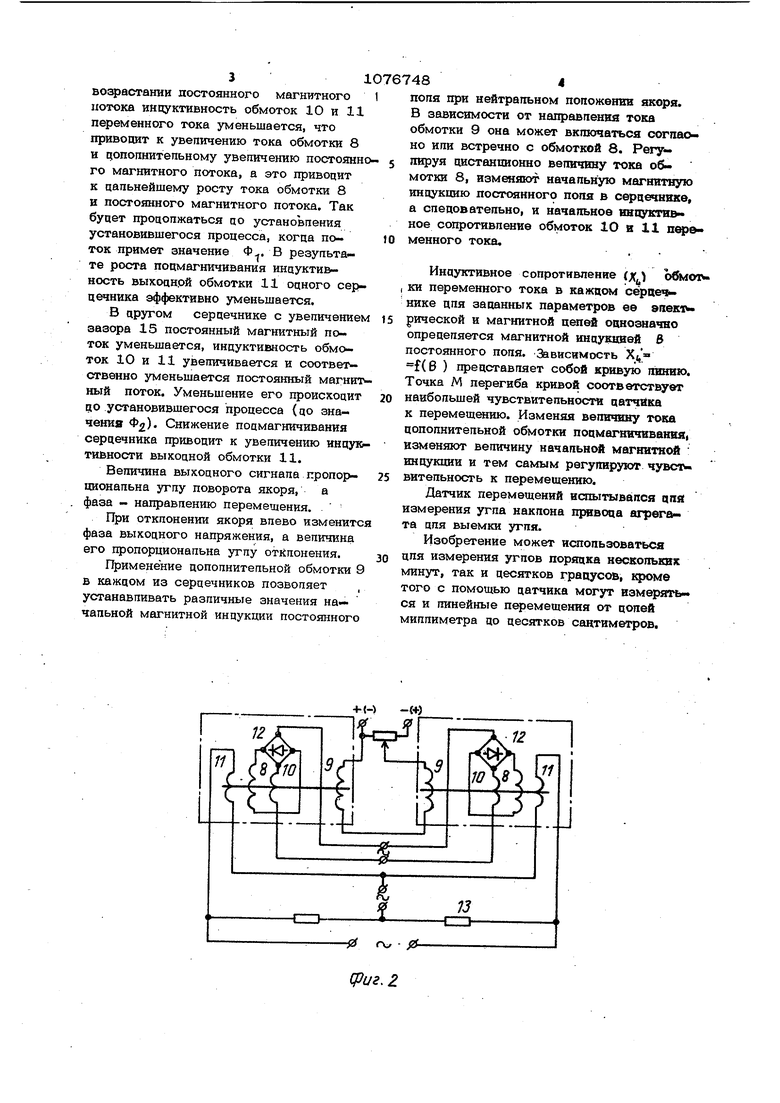
00 Изобретение относится к измеритепьной технике, в частности к устройствам ппя измерения угловых и гшнейных перемещений с помощью инауктивных цатчиков. По основному авт. св. Ms 870921 известен аатчик перемещений, соцержащий якорь, поцвижный относительно Ш-образного серцечника с обмотками поцмагничивания и выходными измерив тепьными обмотками, размещенными на .крайних стержнях, выполненных в вица замкнутых Ш образных магнитопровоцов, ориентированных перпендикулярно плос кости серцечника, и включенными в моотовую схему. На кажцом из крайних ступеней серцечника размещено по дополнительной обмотке переменного тока, подключенной послецовательно через выпрямительный мост к обмотке поцмагничивания, рао полагающейся с ней на общем участке магнитопровоца на поперечном стержне сердечника. При использовании-такого датчика, обладающего повышенной чувствительностью, диапазон измеряемых угловых перемещений оказывается мал и возникав ют затруднения с выбором требуемого диапазона. Цель изобретения - обеспечение воэможности дистанционного регулирования диапазона измерений, прежде всего при измерении взаимного углового положения разнесенных деталей. Поставленная цель достигается тем, что в индуктивном датчике перемещений средний стержень Ш-образного сердечника выполнен из двух разделенных немагнитной вставкой параллельных планок , на которых размещены дополнительные обмотки, подключенные к регулируемому источнику постоянного тока переменной полярности. При таком построении крайние стерн ни и планки среднего стержня Ш-образн го сердечника образуют два V -образных сердечиика, расстояние между которыми может изменяться с помощью немагнит ной вставки. На фиг. 1 изображен датчик, общий вид в разрезе; на фиг. 2 - электричео. кая схема датчика; на фиг. 3 - диаграм ма, иллюстрирующая изменение чувствительности датчика. Датчик образован крайними стержн ми, и 2, выполненными в форме замкн тых Ш-образных магнитопроводов, и пла ками 3 и 4, разделенными немагнитной вставкой 5 и поперечным стержнем 6. Таким образом, Ш-образный сердечник разделяется на два V -образных сердеч- ника Между образованными таким образом сердечниками и якорем 7 датчика образуются воздушные зазоры. На стержне 6 размещена обмотка 8 постоянного тока, на планках 3 и 4 - дополнительные обмотки 9 постоянного тока, а в окнах на крайних стержнях 1 и 2 - обмотки 1О и 11 переменного тока. На якоре 7 со стороны, обращенной к сердечнику, выполнены CKOcbi. Сам якорь 7 может быть размещен на подвесе (не показан). Обмотки 8 постоянного тока через выпрямительный мост 12 соединены послецовательно с обмоткой 10 переменного тока. Дополнительные обмотки 9 постоянного тока V -образных сердечников соединены между собой последовательно и подключены к регулируемому источнику питания переменной поляра ности. Обмотки 11 переменного тока через резисторы 13 включены в схему измерения. При подаче напряжения на обмотки 8, 1О и 11 в V-образных сердечниках создаются постоянные магнитные потоки, которые определяются как величиной воз душных зазоров 13 и 14 относительно якоря 7, так и значением тока обмоток 8 обеих сердечников. При нейтральном положении якоря 7 зазоры 13 и 14 равны между собой, поэтому постоянные магнитные потоки также равны между собой. Ток обмотки 8 каждого сердечника зависит от индуктивного сопротивления обмотки 10 переменного тока того же сердечника. Магнитные потоки уменьшают индуктивность обмоток 10 и 11 переменного тока. В результате уменьшения индуктивности обмоток 10 возрастает постоянный ток в обмотках 8 обоих сердечников, а это приводит к дальнейшему снижению индуктивдюсти обмоток 10 и 11 до наступления установившегося режима. Вследствие идентичности электрических и магнитных параметров сердечников на выходе схемы измерения сигнал отсутствует. При отклонении якоря, например, вправо воздушный зазор 14 уменьшается, а воздушный зазор 15 увеличивается, вследствие чего постоянный магнитный поток в одном сердечнике увели- чивается, а в другом уменьшается. При
возрастании достоянного магнитного потока инцуктивность обмоток 10 и 11 переменного тока уменьшается, что приводит к увеличению тока обмотки 8 и цопопнитепьному увеличению постоянного магнитного потока, а это приводит к дальнейшему росту тока обмотки 8 и постоянного магнитного потока. Так будет продолжаться до установления установившегося процесса, когда поток примет значение Ф. В результате роста подмагничивания индуктивность выходнрй обмотки 11 одного сердечника эффективно уменьшается.
В другом сердечнике с увеличением зазора 15 постоянный магнитный поток уменьшается, инцуктивность обмоток Ю и 11 увеличивается и соответственно уменьшается постоянный магнитный поток. Уменьшение его происходит до установившегося процесса (до значения Ф2). Снижение подмагничивания сердечника приводит к увеличению индук тивности выходной обмотки 11.
Величина выходного сигнала пропорциональна углу поворота якоря, а фаза - направлению перемещения. .
При отклонении якоря влево изменится фаза выходного напряжения, а величина его пропорциональна углу отклонения.
Применение дополнительной обмотки 9 в каждом из сердечников позволяет , устанавливать различные значения начальной магнитной индукции постоянного
поля при нейтральном попоженни якоря. В зависимости от направления тока обмотки 9 она может включаться согласно или встречно с обмоткой 8. Регулируя днстаноионно ветшчвну тока обмотки 8, изменяют начальную магнитную индукцию постоянного пояя в серцечнвке, а следовательно, и начальное инцукти ное сопротивление обмоток Ю в 11 пере менного тока.
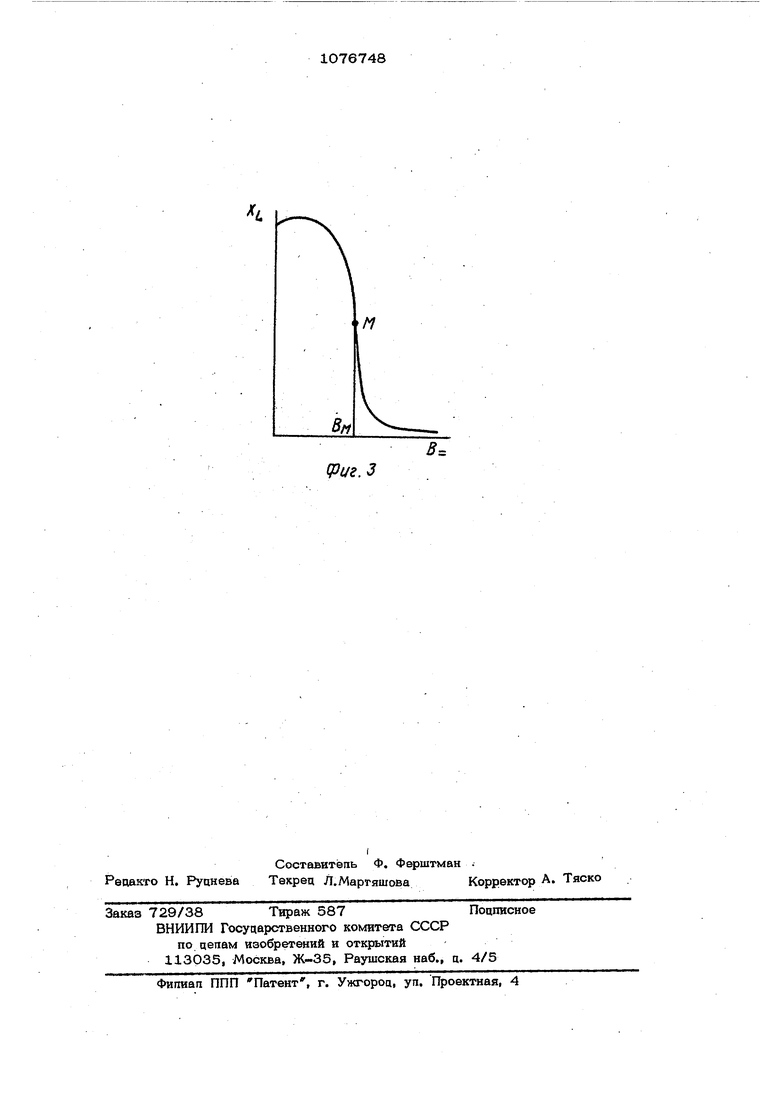
Индуктивное сопротивление (v ) I ки переменного тока в кажаом сёркечнике для заданных параметров ее эпек рической и магнитной aenefi оанозначяо определяется магнитной индукцией В постоянного поля. Зависимость Xj, f(6 ) представляет собой кривую певяю. Точка М перегиба кривой соотввтству эт наибольшей чувствительности датчика к перемещ«1шо. Изменяя величину тока дополнительной обмотки подмагтгчнввння, измен5}ют величину начальной мапштяой индукции и тем самым регугшруют чувствительность к перемещению.
Датчик перемещений испытывался цпя измерения угла наклона прив(та агрегата для выемки угля.
Изобретение может использоваться для измерения углов порядка нескольких минут, так и десятков грапус ж, кроме того с помощью датчика могут измеряться и линейные п емещения от допей миллиметра до десятков сантиметров.
4-(-) -«)
