со ел 
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля и измерения конечных перемещений поршня домкрата горной машины | 1986 |
|
SU1416704A1 |
| Индуктивный датчик перемещений | 1979 |
|
SU870921A1 |
| Бесконтактный переключатель | 1986 |
|
SU1372406A1 |
| Датчик положения выемочной машины | 1989 |
|
SU1735579A1 |
| ИСТОЧНИК ПИТАНИЯ ПОСТОЯННОЙ МОЩНОСТИ | 1991 |
|
RU2025876C1 |
| Индуктивный датчик перемещений | 1982 |
|
SU1076748A2 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ СОПРОТИВЛЕНИЯ ОБМОТОК ЭЛЕКТРИЧЕСКИХ МАШИН ПЕРЕМЕННОГО ТОКА | 1967 |
|
SU193610A1 |
| ИНДУКТИВНЫЙ ДИФФЕРЕНЦИАЛЬНЫЙ ДАТЧИК ЛИНЕЙНЫХ | 1965 |
|
SU170348A1 |
| Регулируемое трансформаторно-выпрямительное устройство | 2023 |
|
RU2802419C1 |
| Устройство для измерения разности давлений | 1982 |
|
SU1064172A1 |
Изобретение относится к горным машинам и позволяет с высокой точностью контролировать и измерять конечные перемещения поршня домкрата горной машины или комплекса. Для этого устройство снабжено дополнительной обмоткой переменного тока, двумя выпрямительными мостами (ВМ) 12 и потенциометром (П) 13, а вза- имодействуюш.ий с ферромагнитным наконечником поршня индуктивный датчик конечных перемещений с обмоткой 11 переменного тока соединен с источником тока и выполнен из двух Ш-образных сердечников. На среднем стержне каждого сердечника размещена обмотка подмагничивания (ОП) 9. Обмотки 11 переменного тока расположены в выполненных в сердечниках концентрических расточках. Аноды ВМ 12 соединены между собой и подключены к среднему выводу П 13. Крайние выводы П 13 подключены соответственно к катодам ВМ 12 и к одним из выводов ОП 9. Другие выводы ОП 9 соединены с анодами ВМ 12. К выводам обмоток переменного тока ВМ 12 подключены обмотки 11 переменного тока. При- ближение конусного наконечника к среднему стержню какого-либо сердечника увеличивает магнитный поток его ОП 9. Индуктивность обмотки 11 уменьшается и дополнительно увеличивается ток ОП 9, который создает дополнительный постоянный магнитный поток, на выходе П 13 появляется сигнал, полярность которого определяется положением поршня со стороны сердечника. Величина сигнала соответствует координате поршня от его крайнего положения. 3 ил. « (Л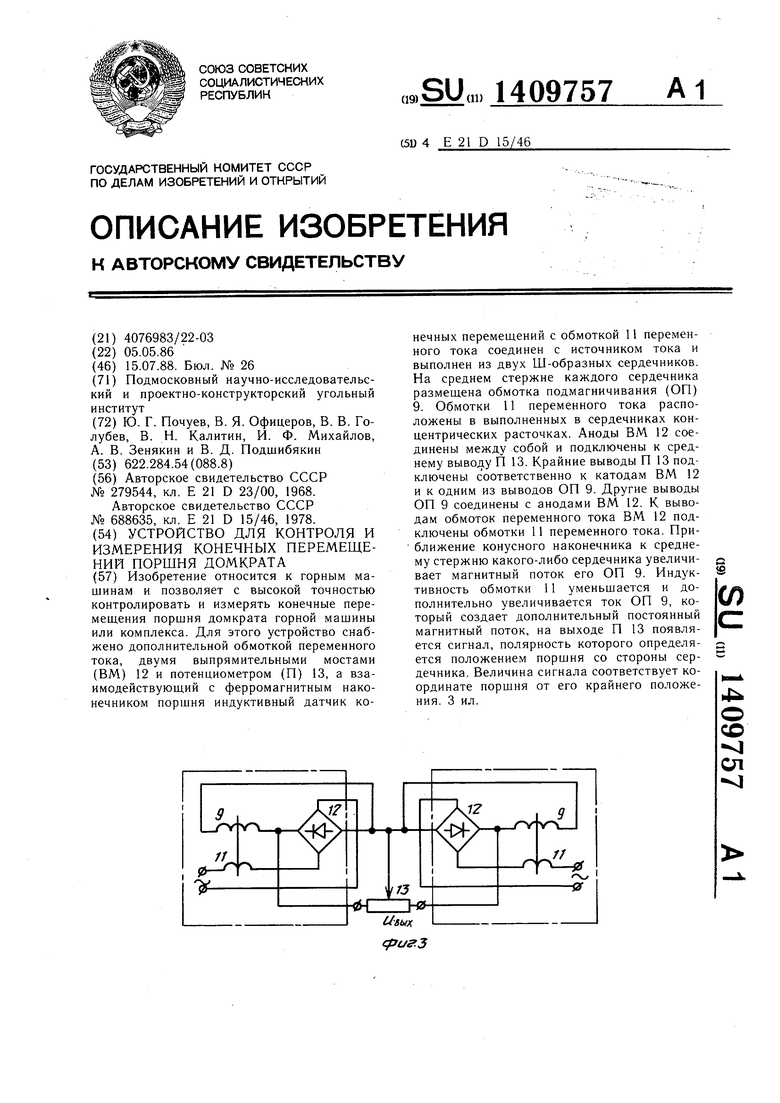
effae.S
Изобретение относится к горным машинам и предназначено для бесконтактного контроля положения и измерения конечных перемещений поршня домкрата горной машины или комплекса.
Целью изобретения является повышение точности измерения.
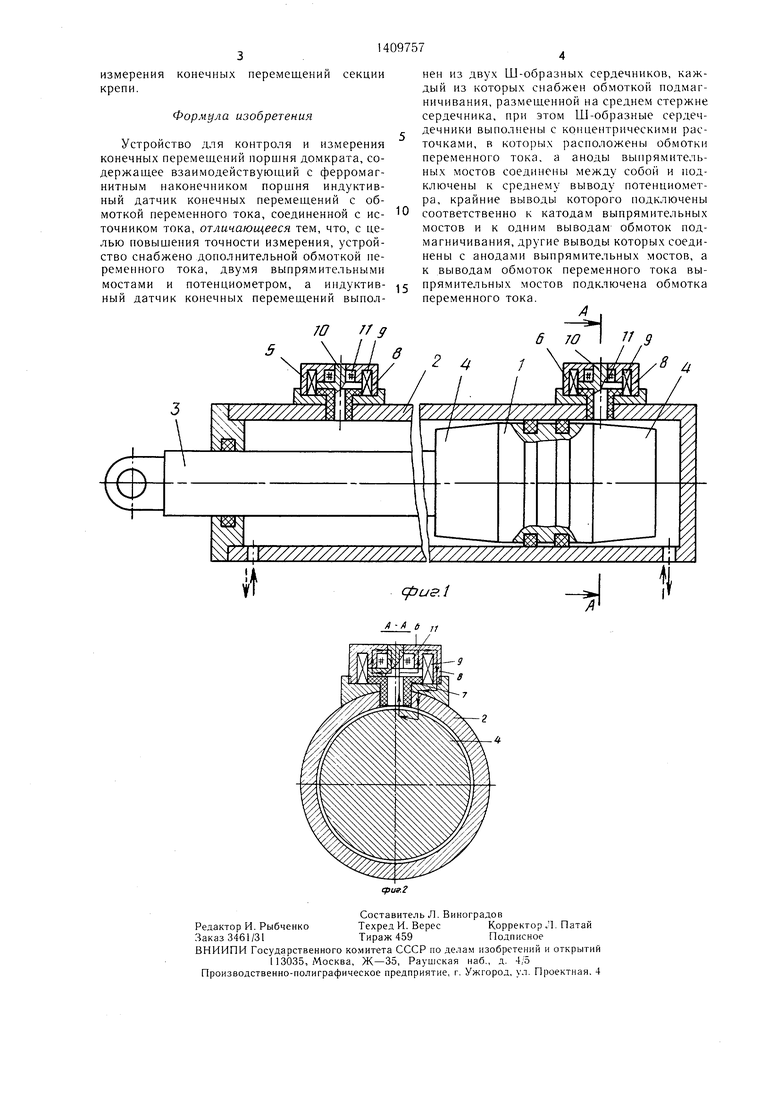
На фиг. 1 изображено предлагаемое устройство, обший вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - схема включения устройства.10
Устройство для контроля и измерения перемещений поршня 1 домкрата, размещенного в цилиндре 2 и имеющего щток 3 и ферромагнитные наконечники 4 конусообразной формы, содержит индуктивный дат- ,- чик, выполненный из одинаковых устройств 5 и 6, установленных в цилиндре через немагнитные втулки 7 со стороны щтоковой и норщневой полостей. Каждое устройство 5, 6 состоит из Ш-образного сердечника 8, обмотки 9 подмагничивания, размещенной 20 на среднем стержне 10, обмотки 11 переменного тока, размещенной в концентрической расточке стержня 10 таким образом, что магнитопровод вокруг нее замкнут. Обмотки 11 (фиг. 3) включены на переменные
потребляет при крайнем правом положении поршня. Выходной сигнал с резистора 13 может отключать гидроклапан и прекращать подачу жидкости в щтоковую полость домкрата. Одновременно при необходимости может быть обесточена цепь питания датчика. При подаче жидкости в поршневую полость штока с поршнем перемещается влево (на раздвижку домкрата).
При прохождении порщнем расстояния между датчиками устройство потребляет минимальную мощность. Порщень, подходя к устройству 5, обеспечивает подмагничивание магнитопровода обмотки 1 1 этого датчика. Вследствие положительной обратной связи между обмотками 9 и 11 подмагничивание обмотки 11 увеличивается одновременно за счет влияния двух факторов: уменьшения зазора между средним стержнем 10 и якорем, а также увеличения тока под- магничивающей обмотки 9.
Величина выходного сигнала на резисторе 13 пропорциональна координате якоря, измеренной, например, от его крайнего левого положения, а полярность сигнала соответствует положению поршня со стороны устройства 5. Максимальный выходной сигнапряжения. В устройстве 5 обмотка 11 черезнал, соответствующий крайнему левому половыпрямительный мост 12 включена последовательно с обмоткой 9 подмагничивания. Аналогично включены обмотки 11 и 9 через выпрямительный мост 12 в устройстве 6. Выходное напряжение UBUX снимается с резис- ,Q тора 13, подключенного к одноименным полюсам выпрямительных мостов 12.
жению поршня, может выключать гидроклапан, подающий жидкость в поршневую полость, и снимать напряжение питания с устройств.
Так как время передвижения домкрата может во много раз превосходить время перемещения его на конечном участке пути, а тем более при контроле конечных положений домкрата, то общая энергия (или мощность), потребляемая датчиком в процессе движения порщня, значительно снижается.
Устройство работает следующим образом. На устройство подается напряжение переменного тока. При подаче жидкости в штоковую полость домкрата щток с поршнем перемещается вправо на сокращение домкрата. При выходе наконечника 4 из-под среднего стержня 10 устройства 5 магнитопровод подмагничивающих обмоток 9 обоих устройств разомкнут, создаваемый ими магнитный поток рассеяния невелик, подмагничивание магнитопроводов обмоток 11 переменного тока мало, а индуктивное сопротивление их велико. Поэтому оба устройства потребляют минимальную мощность, а на выходе устройства (на резисторе 13) сигнал равен нулю. Приближение конусного наконечника 4 к среднему стержню устройства 6 увеличивает магнитный поток обмотки 9 этого устройства, что приводит к уменьщению индуктивности обмотки 11 и до- полнительному увеличению тока обмотки 9, который создает дополнительный постоянный магнитный поток. На выходе устройства появляется сигнал, полярность которого определяется положением поршня со стороны устройства 6, а величина сигнала соответствует координате поршня, измеренной, например, от его крайнего правого положения. Максимальную мошность устройство 6
потребляет при крайнем правом положении поршня. Выходной сигнал с резистора 13 может отключать гидроклапан и прекращать подачу жидкости в щтоковую полость домкрата. Одновременно при необходимости может быть обесточена цепь питания датчика. При подаче жидкости в поршневую полость штока с поршнем перемещается влево (на раздвижку домкрата).
При прохождении порщнем расстояния между датчиками устройство потребляет минимальную мощность. Порщень, подходя к устройству 5, обеспечивает подмагничивание магнитопровода обмотки 1 1 этого датчика. Вследствие положительной обратной связи между обмотками 9 и 11 подмагничивание обмотки 11 увеличивается одновременно за счет влияния двух факторов: уменьшения зазора между средним стержнем 10 и якорем, а также увеличения тока под- магничивающей обмотки 9.
Величина выходного сигнала на резисторе 13 пропорциональна координате якоря, измеренной, например, от его крайнего левого положения, а полярность сигнала соответствует положению поршня со стороны устройства 5. Максимальный выходной сигQ
5
0 r 0
5
жению поршня, может выключать гидроклапан, подающий жидкость в поршневую полость, и снимать напряжение питания с устройств.
Так как время передвижения домкрата может во много раз превосходить время перемещения его на конечном участке пути, а тем более при контроле конечных положений домкрата, то общая энергия (или мощность), потребляемая датчиком в процессе движения порщня, значительно снижается.
В процессе перемещения домкрата (до конечных перемещений) мощность, потребляемая датчиком, мала. В конечных перемещениях мощность потребляется только одним устройством, причем величина этой мощности пропорциональна величине конечного перемещения. Максимальную мощность датчик потребляет в конечных положениях домкрата, причем кратковременно.
Применение устройства с незначительной потребляемой мощностью позволяет подключать к одному источнику ограниченной (искробезопасной) мощности несколько домкратов с датчиками и другими потребителями. Это избавляет от необходимости применения нескольких источников питания, снижает число жил питания аппаратуры, упрощает цепи коммутации при подключении датчиков домкратов к линиям связи одного источника питания, что приводит к упрощению устройства, повыщению надежности и снижению стоимости аппаратуры.
Предусматривается применение предлагаемого устройства в очистном механизированном комплексе КПМ для контроля и
измерения крепи.
конечных перемещений секции
Формула изобретения
Устройство для контроля и измерения конечных перемеихений домкрата, содержащее взаимодействующий с ферромагнитным наконечником поршня индуктивный датчик конечных перемещений с обмоткой переменного тока, соединенной с источником тока, отличающееся тем, что, с целью повышения точности измерения, устройство снабжено дополнительной обмоткой переменного тока, двумя выпрямительными мостами и потенциометром, а индуктивный датчик конечных перемещений выполf/A У////////////////// //////У////7 /: у/.
У|cfJuff.
и I
0
5
ней из двух Ш-образных сердечников, каждый из которых снабжен обмоткой подмаг- ничивания, размещенной на среднем стержне сердечника, при этом Ш-образные сердеч- дечники выполнены с концентрическими расточками, в которых расположены обмотки переменного тока, а аноды выпрямительных мостов соединены между собой и подключены к среднему выводу потенциометра, крайние выводы которого подключены соответственно к катодам выпрямительных мостов и к одним выводам обмоток под- магничивания, другие выводы которых соединены с анодами выпрямительных мостов, а к выводам обмоток переменного тока выпрямительных мостов подключена обмотка переменного тока.
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОЛОЖЕНИЯ ГИДРОДОМКРАТОВ ГОРНЫХ МАШИН | 0 |
|
SU279544A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Устройство для измерения перемещений штока гидростойки | 1978 |
|
SU688635A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
