Изобретение относится к неразрушающему контролю материалов и изделий и может быть использовано в машиностроении при контроле движущихся ферромагнитных инделий.
Известен способ контроля перемевдающихся ферромагнитных изделий, заключающийся в том, что изделия намагничивают переменным магнитным полем, изменение которого вызывает наведение ЭДС. Из разности наведен- ных в изделиях ЭДС выделяют третью гармонику, которую используют как информативную для разбраковки изделий 1.
Недостатком способа является низкая точность контроля из-за влияния скорости движения изделий на результаты контроля.
Наиболее близким к изобретению по технической сущности является способ электромагнитного контроля движущихся ферромагнитных изделий, заключающийся в том, что контролируемое изделие намагничивают в постоянном магнитном поле, при отсутствии намагничивающего поля преобразуют изменение индукции, вызванное движением изделия вне намагничивающего поля в электрический сигнал С2..
Недостатком известного способаявляется невысокая точность контроля из-за зависимости выходного сигнала от скорости прохождения контролируемых деталей через измерительную катушку .
Цель изобретения - повышение точности и достоверности контроля.
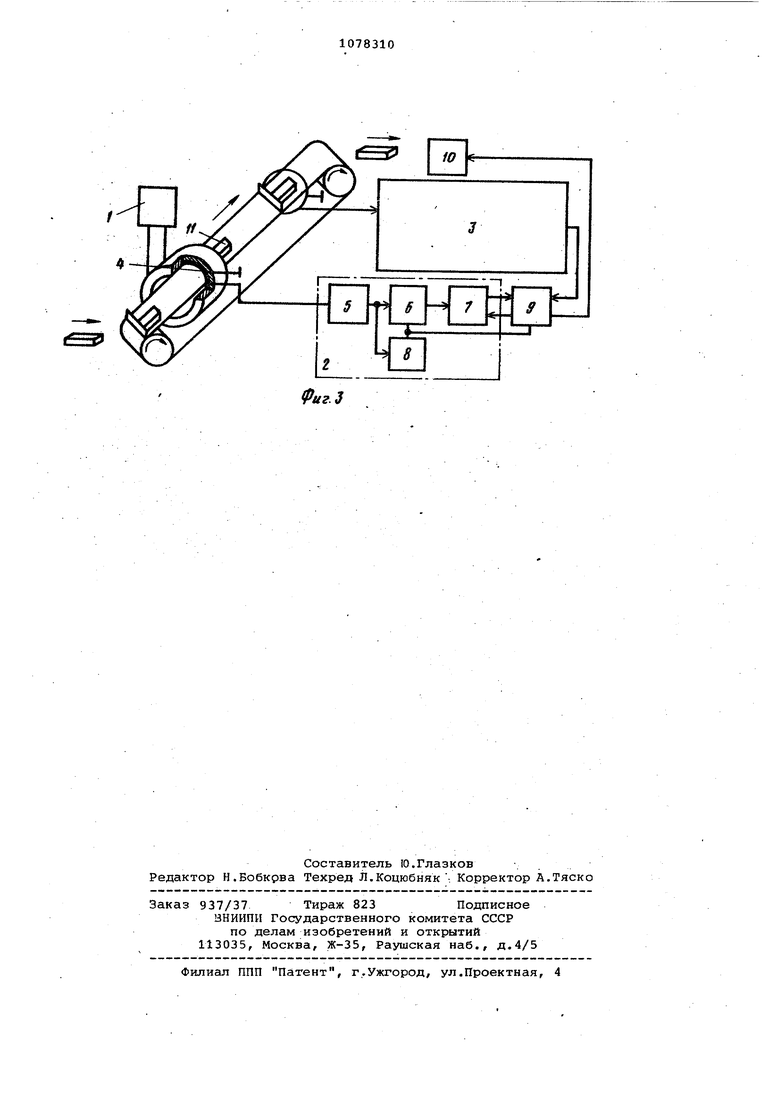
Поставленная цель достигается тем что дополнительно преобразуют в электрический сигнал изменение индукции в процессе намагничивания изделия, выделяют из полученных сигналов импульсы одной полярности, интегрируют их и о контролируемых параметрах судят по результатам интегрирования импульсов обоих сигналов. чНа фиг,.1 представлены временные диаграммы изменения магнитной индукции, электрического сигнала и проинтегрированного импульса соответственно для области с постоянным магнитным полем; на фиг.2 - то же, для области, где намагничивгиощее поле отсутствует на фиг.З - структурная схема устройства, реализующая предлагаемый способ.
Устройство содержит намагйичивающую систему 1, два измерительных канала 2 и 3, каждый из которых содержит соединенные последовательно измерительную катушку 4, усилители 5, ключ б и блок 7 интегрировани. Между выходом усилителя 5 и управляющим входом ключа 6 включен компаратор 8. К выходам измерительных каналов 3 и 3 подключены соединенные последовательно блок 9 управления и блок 10 . разбраковки и регистрации. Выходы компараторов 8 обоих измерительных каналов 2 и 3 соединены с блоком 9 управления.
Сущность способа заключается в следующем.
В процессе своего движения контролируемая деталь проходит сквозь область с постоянным магнитным полем и вызывает в ней изменение индукции (эпюра а, фиг.1К Этоизменение индукции, например, с помощью катушки, эхватьтающей указанную область, по закону электромагнитной индукции Фарадея e -(, преобразуется в электрический сигнал, где Ф(t магнитный поток, сцепленный с катушкой, N - число витков катушки; ЭДС индукции катушки. Момент времени t соответствует максимальному значению индукции в указанной области. В этот момент времени намагниченность контролируемой детали максимальна, а ЭДС катушки преобразо тел равна нулю. В момент времени t конт.ролируемая детсшь практически перестает оказывать влияние на указанную область. В этот момент времени ЭДС катушки-прёобразователя становится равной нулю. Выделив из индуцированного электрического сигнала однополярный импульс 5, (эпюра б, фиг.1 ). соответствующий интервалу времени ( проинтегрировав его, по-, лучим напряжение f (эпюра в, фиг.И величина которого пропорциональна разности максимальной и минимальной индукции в области с постоянны магнитньм полем при прохождении сквозь нее контролируемой детали, т.е. прогпорциональное максимальной магнитной , контролируемой детали. Полученный результат не зависит от скорости: двгмсения контролируемой детали, так как результат интегрирования сигнала катушки определяется только значениями магнитного потока, сцепленного с ней в начальный и конечный моменты интегрирования.
В процессе своего дальнейшего движения намагниченная контролируе ла деталь проходит сквозь область, где намагничивающее поле отсутствует, и в.ызывает в ией изменение магнитной индукции Аэпюра г, фиг.2 ). Это изменение индукции с помощью катушки, охватываницей указанную область по закону электромагнитной индукции, преобразуется в электрический сигнал (эпюра д, фиг.2). Момент времени t| соответствует максимальному значению индукции в этой области.
В момент времени t контролируемая детёшь практически перестает оказьюать влияние на эту область. В эти моменты времени ЭДС катушки-пре-обраэователя становится равной нулкгг Выделив из индуцированного электрического сигнала однополярный импульс 5j (эпюра д ), соответствующий интерВёшу времени (з 4 проинтег. рировав ei, получим напряжение (2 (эпюра е), величина которого пропорциональна максимсшьной индукции в области, в которой магнитное поле отсутствует, при прохождении сквозь нее контролируемой детали, т.е. величина Ч/2 пропорциональна значению остаточной индукции В в контролируемой детали. Полученный результат не згшисит от скорости Движения контролируемой детали. Транспортирующая система должна обеспечивать одинаковое полоiяени« контролируемых деталей при их прохождении сквозь упомянутые облас ти .--.-,
Измеренные значения напряжения U и и , пропорциональные значениям максимальной остаточной В индукции в контролируемых деталях, позволяют с высокой достоверностью судить об их механических свойствах. ПроизводительноСть контроля определяется только скоростью транспортирювки деталей и может быть очень высокой, так как при предлагаемом способе контроля не требуется останавливать контролируемую деталь.
Устройство, реализующее предлагаемый способ, работает следующим образом.
Намагничивающая система 1, намагничивает контролируемые детали 11 до насыщения. Измерительная катушка 4, находящаяся в постоянном магнитном поле, регистрирует импульс ЭДС, наводимый проходящими деталями. Этот импульс усиливается усилителем 5, поступает на вход компаратора 8.Компаратор 8 фиксирует моменты времени и t и открывает ключ б на этот интервалвремени. Однополярный импульс 5 поступает на блок 7 интегрирования.
Аналогично работает и второй измерительный какал. Напряжения с выходов измерительных каналов поступают на блок 9 управления, который управляет работой блока 10 разбраковки и регистрации.

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ электромагнитного контроля механических свойств движущихся ферромагнитных изделий | 1982 |
|
SU1073690A1 |
| Способ электромагнитного контроля механических свойств движущихся ферромагнитных изделий | 1983 |
|
SU1118906A1 |
| Способ магнитного контроля качества движущихся ферромагнитных изделий | 1985 |
|
SU1288580A1 |
| Устройство для электромагнитного контроля движущихся ферромагнитных деталей | 1980 |
|
SU845603A1 |
| Способ электромагнитного контроля качества движущихся коротких изделий | 1985 |
|
SU1307319A1 |
| Устройство для электромагнитного контроля движущихся ферромагнитных изделий | 1990 |
|
SU1739273A2 |
| Устройство для электромагнитного контроля механических свойств движущихся ферромагнитных изделий | 1986 |
|
SU1397817A1 |
| Устройство для электромагнитного контроля движущихся ферромагнитных изделий | 1988 |
|
SU1644019A1 |
| СПОСОБ МАГНИТНОГО КОНТРОЛЯ МЕХАНИЧЕСКИХ СВОЙСТВ ФЕРРОМАГНИТНЫХ ИЗДЕЛИЙ | 1990 |
|
RU2051380C1 |
| Способ контроля движущихся ферромагнитных объектов протяженной формы | 1980 |
|
SU1096564A1 |
СПОСОБ ЭЛЕКТРОМАГНИТНОГО КОНТРОЛЯ ДВИЖУЩИХСЯ ФЕРРОМАГНИТНЫХ .ИЗДЕЛИЙ, заключающийся в том, что контропируемое делие намагничивают в постоянном Магнитном поле,при от- сутстВИИ намагничивающего поля преобразуют изменение индукции, вызванное движением изделия вне намагничивающего поля в электрический сиРнал, отличающийся тем, что, с целью повЕлиения точности и достоверности контроля, дополнительно преобразуют в электрический сигнал изменение индукции в процессе намагничивания изделия, вьщеляют из полученных сигналов импульсы од;ной полярности, интегрируют их и о контролируемых параметрах судят по результатам интегрирования импульсов i обоих сигналов. (Л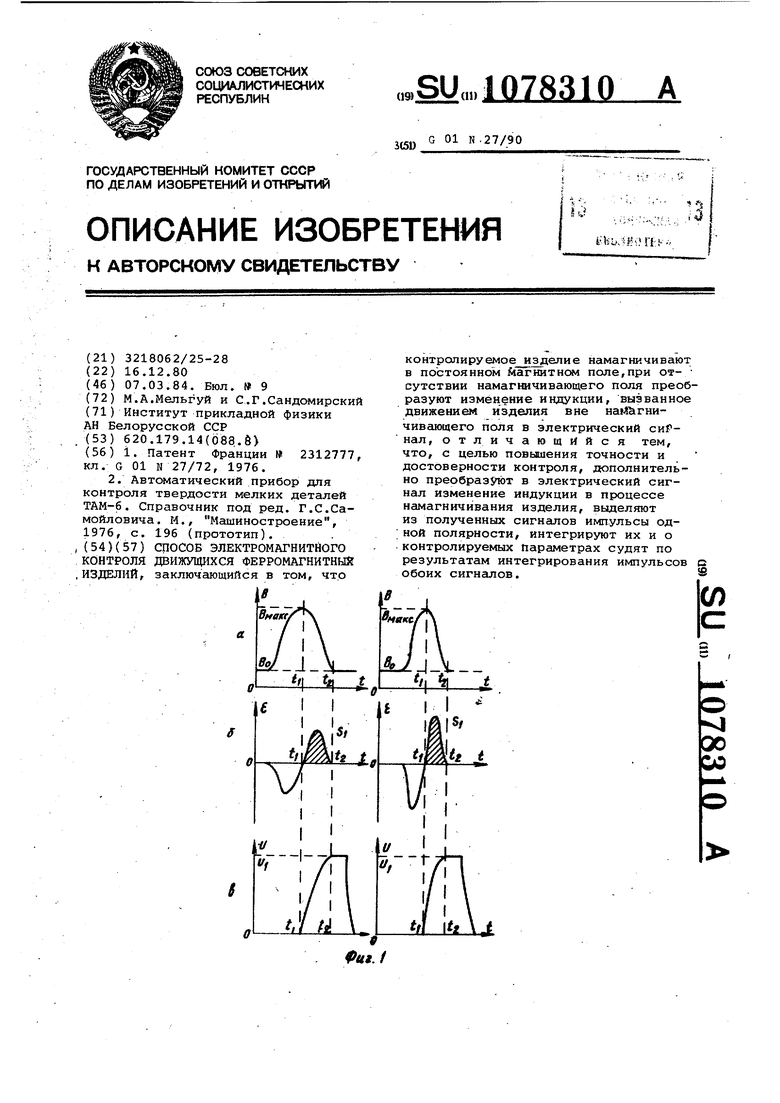
g ---w
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ПОДДОН ДЛЯ СБОРА ЖИДКОСТИ | 2006 |
|
RU2312777C1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Справочник под ред | |||
| Г.С.Самойловича | |||
| М., Машиностроение, 1976, с | |||
| Пылеочистительное устройство к трепальным машинам | 1923 |
|
SU196A1 |
| , | |||
