Изобретение относится к неразрушающему контролю материалов и изделий, в частности к контролю механических свойств движущихся ферромагнитных материалов и изделий.
Известен способ измерения остаточной намагниченности, согласно которому объект контроля намагничивают с двух противоположных сторон, а затем считывают величину остаточной намагниченности Cl 3.
Недостаток данного способа связан с зависимостью результатов измерений от поперечных смещений контролируемого объектаS, а от скорости контролируемого объекта.
Известен также способ контроля оборванных проволок в остальных канатах, в котором с целью уменьшения влияния изменений в скорости движения каната на точность измерения производят интегрирование сигнала с регистрирующей катушки 2.
Недостаток данного способа связан с зависимостью результата измерений от поперечного смещения объекта контродя,
Наиболее близким к предлагаемому по технической сущности является способ электромагнитного контроля механических свойств ферромагнитных объектов в процессе их движения, включакяций намагничивание контролируемого участка объекта и регистрацию сигнала с помощью измерительной катушки. Согласно способу контролируемый объект намагничивают по его периметру нормально к внешней поверхности, измеряют значения норма.пьных составляющих градиентов, остаточной магнитной индукции по различным направлениям, суммируют их и по полученной сумме судят о механических свойствах объекта контроля СЭЗ.
Недостаток известного способа связан с тем, что он не позволяет обеспечить отстройку от внбра1 ;нонных смещений контролируемого объекта в достаточно широких пределах с высокой точностью, так как величина градиента нормальной составляющей магнитного поля зависит от расстояния до объекта по нелинейному закону.
Цель изобретения - повышение точности путем уменьшения влияния поперечных смещений объекта.
Цель достигается тем, что согласно способу, включающему намагничивание контролируемого участка объекта и
регистрацию сигнала с помощью измер ительной катушки, контролируемый участок намагничивают в противоположных направлениях относительно направления 5 движения объекта с помощью намагничиваюп их катушек5 располагаемых по краям контролируемого участка.
На фиг. 1 изображено расположение остаточной индукции В(а) и градиен0 та остаточной индукции F(5) по длине контролируемого участка X после намагничивания его импульсным магнитньм полем в двух противоположных направлениях (например,.полем двух встречно
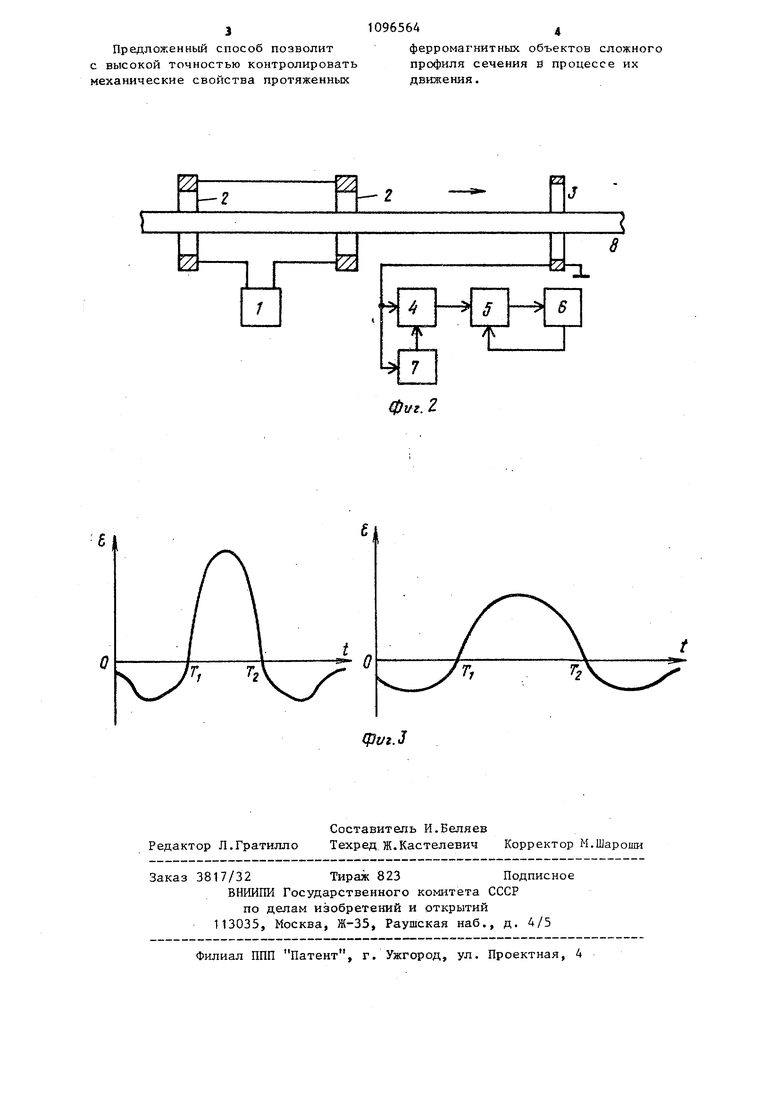
5 включенных катушек, соосных с контролируемым объектом); на фиг. 2 структурная схема устройства, реализующего способ, на фиг. 3 - сигналы (t) измерительной катушки при
0 различных скоростях движения контролируемого объекта.
Устройство для осуществления способа содержит импульсную намагничивающую систему Ij встречно включенные на5 магничиваю дие катушки 2, измерительную катушку 3j ключ 4, интегратор 5, регистратор 6 и компаратор 7, контролируемое изделие 8.
Устройство работает следующим
0 образом.
Импульсная намагничивающая система 1 с помощью намагничивающих катушек 2 нанос,ит на контролируемое изделие 8 метки остаточной намагниченности (фиг. 1а). Прохбдя в процессе своего движения сквозь измерительную катушку 3j пятно остаточной намагниченности ня.зодит в ней сигнал (фиг. 3) В момент времени Т, соотввтству1оп 1-1й прохождению сквозь измерительную катушку 3 участка изделия, намагниче1ного до насьш1ения в одном направленииS срабатывает компаратор 7 и открывает юпоч 4. Интегратор 5 начинает интегрировать сигнал измерительной катушки 3. В момент времени 1 сновз срабатывает компаратор 7 к закрывает ключ 4. На выходе интегратора 5 установится напряжение, пропорциональное интегралу от сигнала измерительной катушки 3 во временном интервале (Т;, и I) Это напряжение регистрируется регистратором 6, после чего происходит сброс интегратора 5 и устройство готово к обработке следующего импульса. По величине зарегистрированного сигнала судят о механических свойствах контролируемого изделия. 3 Предложенный способ позволит с высокой точностью контролировать механические свойства протяженных 1096564 ферромагнитных объектов сложного профиля сечения в процессе их движения.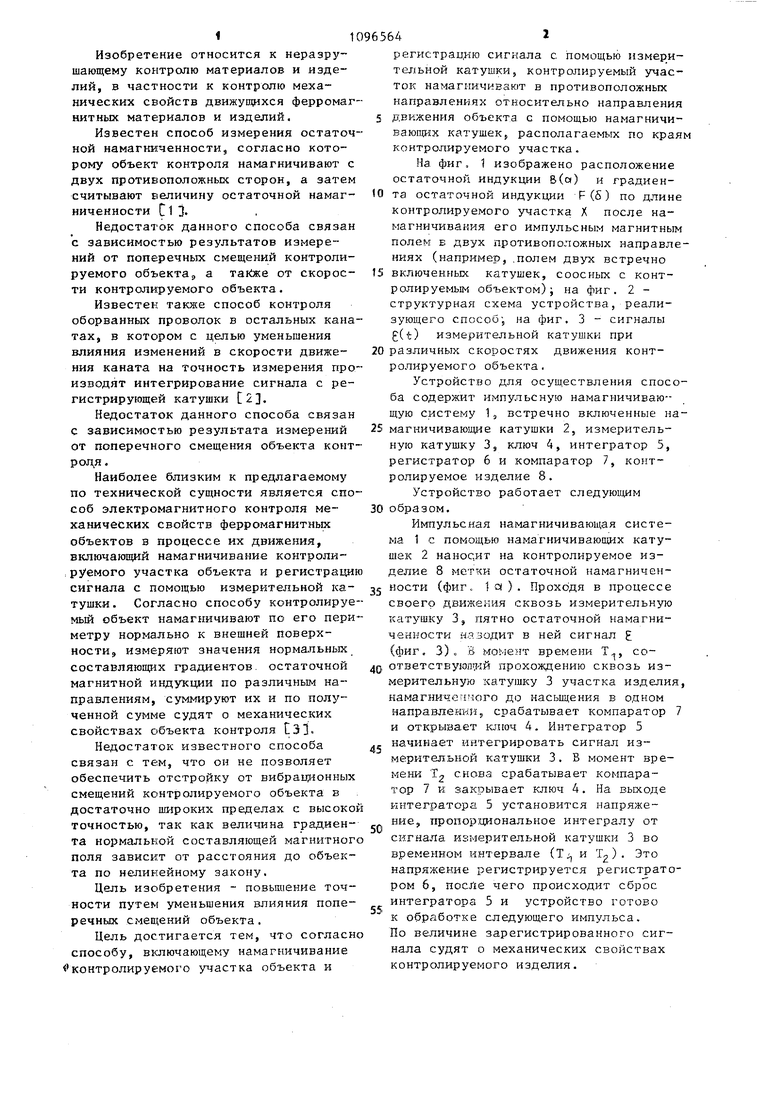
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ электромагнитного контроля движущихся ферромагнитных изделий | 1980 |
|
SU1078310A1 |
| Устройство для электромагнитного контроля движущихся ферромагнитных деталей | 1980 |
|
SU845603A1 |
| Способ электромагнитного контроля механических свойств движущихся ферромагнитных изделий | 1983 |
|
SU1118906A1 |
| Способ контроля физико-механических свойств ферромагнитных изделий и устройство для его осуществления | 1987 |
|
SU1585737A1 |
| Преобразователь для контроля физико-механических параметров металлических изделий | 1985 |
|
SU1295323A1 |
| Устройство для электромагнитного контроля механических свойств движущихся ферромагнитных изделий | 1989 |
|
SU1651188A2 |
| Устройство для электромагнитного контроля движущихся ферромагнитных изделий | 1990 |
|
SU1739273A2 |
| Устройство для контроля механических свойств стальных изделий | 1981 |
|
SU996927A1 |
| Способ электромагнитного контроля физико-механических параметров движущегося ферромагнитного материала | 1982 |
|
SU1109625A2 |
| СПОСОБ ИЗМЕРЕНИЯ ДЕФОРМАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2446385C2 |
СПОСОБ КОНТРОЛЯ ДВИЖУЩИХСЯ ФЕРРОМАГНИТНЫХ ОБЪЕКТОВ ПРОТЯЖЕННОЙ ФОРМЫ, вкл1рчающий намагничивание контролируемого участка объекта и регистрацию сигнала с помощью измерительной катушки, отличающийся тем, что, с целью повышения точности путем уменьшения влияния поперечных смещений объекта, контролируемый участок намагничивают в противоположных направлениях. относительно направления движения объекта с помощью намагничивающих катушек, располагаемых по краям контролируемого участка. § (Л ф«/г./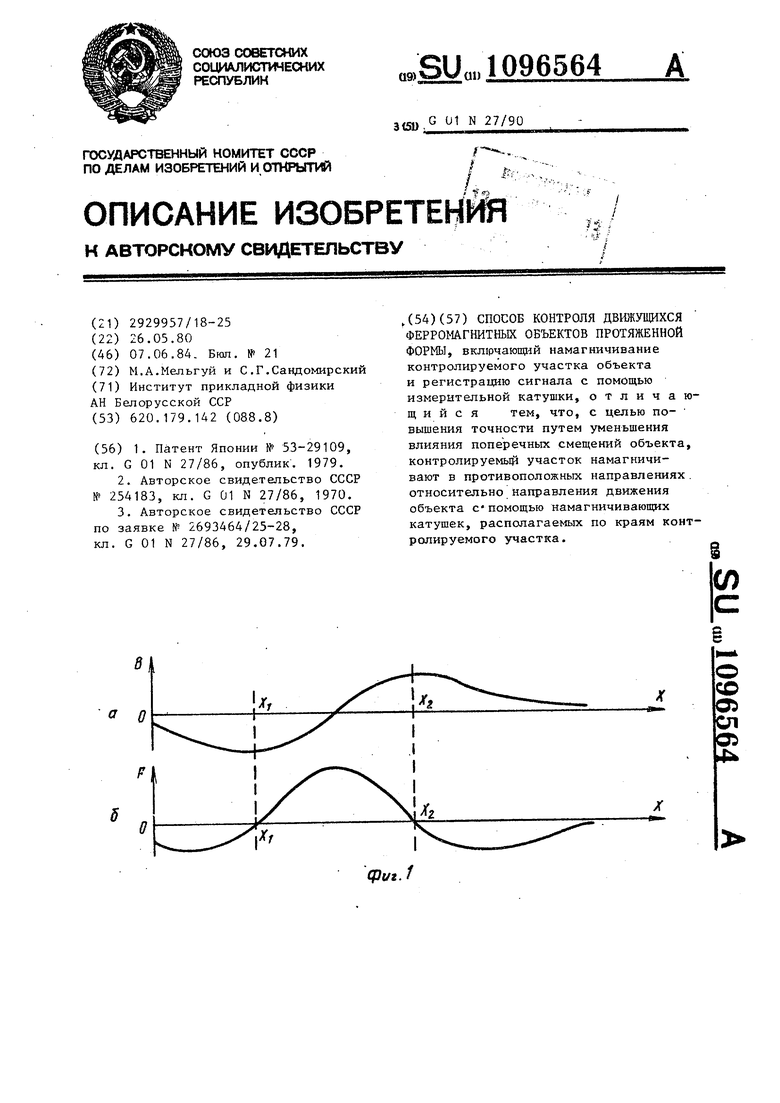
V,.
фиг. г
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Веникодробильный станок | 1921 |
|
SU53A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Дверной замок, автоматически запирающийся на ригель, удерживаемый в крайних своих положениях помощью серии парных, симметрично расположенных цугальт | 1914 |
|
SU1979A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
