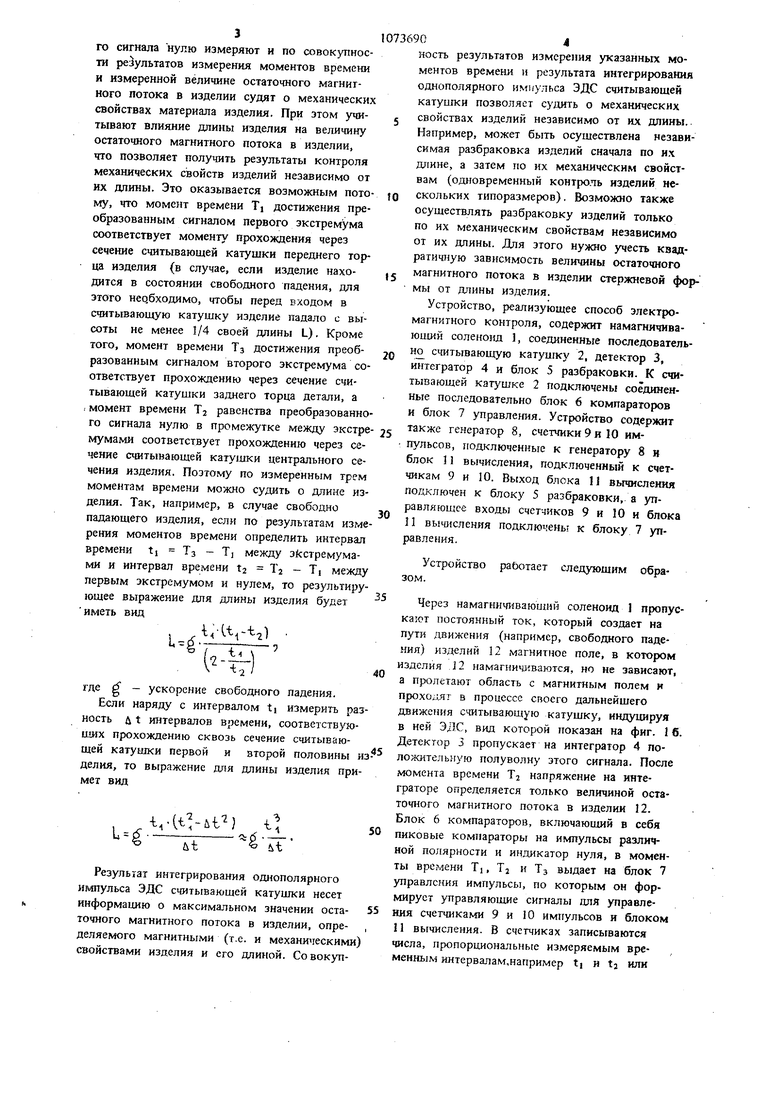
Изобретение относится к керазрушаемому контролю механических и фкзическИхЧ свойств изделий КЗ ферромагнитных материалов и мо жет быть использовано з машиностроительной промышленности ллп структуроскопии изделий стерншевой формы. Известен способ электромагнитного контро ля ферромагнитных изделий, заключающийся в том, что контролируемое и эталонное изделие подвергают воздействию переменного магнитного поля, регистрируют его изменение вьщеляют третью гармонику, несущую инфор мацию о качестве изделия 1. Недостатком известного способа является то, что магнитная проницаемость изделия не всегда однозначно определяет механические свойства изделия. Наиболее к п-редлагаемому является способ электромагнитного 5со1ггроля механических свойств ;дакжушихся ферромагнит ных изделий, заключающийся в том, что контрюлируемое изделие в процессе его движения намагничивают мятнтным полем, преобразуют изменение магнитной индукции, вызванное движением изделия в области, расположенной за намагничивающим полем, в электрический сигнал, интегрируют его и результат интегрирования используют при определении механических свойств изделия {2J. Недостаток известного способа состоит в низкой достоверности контроля, связанной с тем, гто на информационный параметр контр ля наряду с магнитными свойствам - материа ла контролируемых детапей, являющийся структурочузствительным параметром, оказывают влияние геометрические параметры деталей, особенно их длина. Получить информацию о длине контролируемой детали при использовании извест} ого способа контроля невозможно, а применение совместно с нкм известных способов измерения дайны деталей зачастую затрудиигсльно, так как требует до полнительного использования системы оптических датчиков, усложняет метод, снижает надежность аппаратуры. Цель изобретения - повышение достоверности контроля. Поставленная цель достигается тем, что согласно способу электромагнитного контроля механических свойств движугвдхся ферромагнитных изделий, заключающемуся в том, что контролируемое вздел те в прс цессе его движения намагнгтчивают магн1П1 ым полем, прео разуют изменение магнитьгой шдукции, вызва ное движенисй-т изделия гз области, расположе ной за HaMari W fliL;a:. полем, в злектричес кий сигнал, интегрируют его и результат инт грировагшя 1зспользуют при определении меха чески свойств изд,, s электрический сиг нал преобразуют изменение магнит1г;.й индукiBiK в области, расположенной на расстоянии ие ivjfriec четверти длины контролируемого изделия, регистрируют моменты времени достижения электрическим сигналом экстремумов противоположной полярности и нулевого значения в промежутке между экстремумами, а механические свойства изделия определяют по совокупности результатов зарегистрированных моментов времени и интеграла электрического сигнала. Достоверность контроля повышается за счет того, что результать измерения моментов времени достижения преобразованным сигналом экстремумов противоположной полярности при падении намагниченного контролируемого изделия с высоты не менее 1/4 своей длины и результат измерения момента времени равенства преобразованного сигнала нулю в промежутке между экстремумами при контроле изделий стержневой формы совместно с результатом интегрирования однополярного импульса преобразованного сигнала позволяют судить о магнитных (т.е. и механи11еских) свойствах изделий независимо от их длины. На фиг. 1 изображено распределе1ше остаточной индукции вдоль оси намагниченного ферромагнитного изделия стерж} евой формы . и сигнал датчика (считывающей кагушки) при падении сквозь него намагниченного ферромагнитного изделия стержневой формы; на фиг. 2 - структурная схема устройства, реализующего способ. Сущность способа заключается в следующем. Изделие простой геометрической формы (цилиндр, стержень и т.п.) в процессе движения намагничивают вдоль образуюгией. После этого изделие выходит из зоны действия намагничивающего поля и движется дальше (например, свободно падает) в намаг1шченном состоянии. При этом распределение остаточной индукции вдоль оси изделия имеет вид, показанный на фиг. 1 а. Изменение индукции в области, расположенной за областью с намагничиваюаШдм полем по ходу движения изделия, вызванное движением иэделия, преобразуется в электрический сигнал (например, с помощью катушки, сквозь которзю движется намагниченное изделие), показанный на фиг. 16. Однополярньда импульс иапряження сигнала считывающей катушки интегрируют и по нему судят о максимальном значении остаточного Ь1агнитного потока в изделии. Моменты времени Tj и Тз достижения пpeoбpaзoвaнны сигналом экстремальных значений, а также момент времени Та равенства преобразованного сигнала нулю измеряют и по совокупности результатов измерения моментов времени и измеренной величине остаточного магнигного потока в изделии судят о механических свойствах материала изделия. При этом учитывают влияние длины изделия на величину остаточного магнитного потока в изделии, что позволяет получить результаты контроля механических свойств изделий независимо от нх длины. Это оказывается возможным потому, что момент времени Tj достижения преобразованным сигналом первого экстремума соответствует моменту прохождения через сечение считывающей катушки переднего торца изделия (в случае, если изделие находится в состоянии свободного падения, для зтого нео.бходимо, чтобы перед входом в считывающую катушку изделие падало с высоты не менее 1/4 своей длины L). Кроме того, момент времени Тз достижения преобразованным сигналом второго экстремума соответствует прохождению через сечение считывающей катушки заднего торца детали, а . момент времени Т равенства преобразованно го сигнала нулю в промежутке между экстре мумами соответствует прохождению через сечение считывающей катушки центрального сечения изделия. Поэтому по измеренным трем моментам времени можно судить о длине из делия. Так, например, в случае свободно падающего изделия, если по результатам изме рения моментов времени определить интервал времени tj Тз - Т между 3kCTpeMyMaми и интервал времени tj Т - TI между первым экстремумом и нулем, то результиру ющее выражение для длины изделия будет иметь вид avM i-i t где - ускорение свободного падения. Если наряду с интервалом ti измерить раз ность U t интервалов времени, соответствуюцдах прохождению сквозь сечение считывающей катушки первой и второй половины и делия, то выражение для длины изделия при мет вид , . . Результат интегрирования ошюполярного импульса ЭДС считывающей катуижи несет информацию о максимальном значении остаточного магнитного потока в изделии, определяемого магнитными (т.е. и механическими свойствами изделия и его длиной. Совокупность результатов изме1зепия указанных моментов времени и результата интегрирования однополярного импульса ЭДС считывающей катушки позволяет судить о механических свойствах изделий независимо от их длины. Например, может быть осуществлена независимая разбраковка изделий сначала по их длине, а затем по их механическим свойствам (одновременный контроль изделий нескольких типоразмеров). Возможно также осуществлять разбраковку изделий только по их механическим свойствам независимо от их длины. Для зтого нужно учесть квадратичную зависимость величины остаточного магнитного потока в изделии стержневой формы от длины изделия. Устройство, реализующее способ электромагнитного контроля, содержит намагничивающий соленоид 1, соединенные последовательно считывающую катущку 2, детектор 3, интегратор 4 и блок 5 разбраковки. К считывающей 2 подключены соединенные последовательно блок 6 компараторов и блок 7 управления. Устройство содержит также генератор 8, счетчики 9 и 10 импульсов, подключенные к генератору 8 и блок 11 вычисления, подключенный к счетчикам 9 и 10. Выход блока 11 вычисления подключен к блоку 5 разбраковки, а управляющее входы счетчиков 9 и 10 и блока 11 вьншсления подключены к блоку 7 управления. Устройство работает следующим образом. Через намагничивающий соленоид 1 пропускагот постоянный ток, который создает на пути движения (например, свободного падения) изделий 12 магнитное поле, в котором изделия .12 намагнищ ваются, но не зависают, а Пролетают область с магнитным полем и проходят в процессе своего дальнейшего движения считывающую катушку, индуцируя в ней ЭДС, вид которой показан на фиг. 1 б. Детектор 3 пропускает на интегратор 4 положительную полуволну этого сигнала. После момента времени Т2 напряжение на интеграторе определяется только величиной остаточного магнитного потока в изделии 12. Блок 6 компараторов, включающий в себя пиковые компараторы на импульсы различной полярности и индикатор нуля, в моменты времени Т), Tj и Тз выдает на блок 7 управления импульсы, по которым он формирует управляющие сигналы для управления счетчиками 9 и 10 импульсов и блоком И вычисления. В счетчиках записываются числа, пропорциональные измеряемым временным интервалам,например t| и tj или
t, и /it. Блок 11 вычисления производит обработку информации счетчиков 9 и 10 по заданному алгоритму- После этого по команде блока 7 управления сигналы с иитегратора 4 и блока 11 вычисления поступают на блок 5 разбраковки, который
10736906
сортирует изделия 12 по их механическим свойствам.
Изобретение повышает достоверность контроля механических свойств изделий за счет 5 устранения влияния вариаций длины контролируемых изделий на результаты контроля.

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ электромагнитного контроля механических свойств движущихся ферромагнитных изделий | 1983 |
|
SU1118906A1 |
| Способ электромагнитного контроля движущихся ферромагнитных изделий | 1980 |
|
SU1078310A1 |
| Устройство для электромагнитного контроля движущихся ферромагнитных деталей | 1980 |
|
SU845603A1 |
| Способ контроля движущихся ферромагнитных объектов протяженной формы | 1980 |
|
SU1096564A1 |
| Устройство для электромагнитного контроля механических свойств движущихся ферромагнитных изделий | 1986 |
|
SU1397817A1 |
| Устройство для контроля механических свойств стальных изделий | 1981 |
|
SU996927A1 |
| Устройство для электромагнитного контроля механических свойств движущихся ферромагнитных изделий | 1984 |
|
SU1173293A1 |
| Устройство для электромагнитного контроля механических свойств движущихся ферромагнитных изделий | 1989 |
|
SU1651188A2 |
| Способ магнитного контроля качества движущихся ферромагнитных изделий | 1985 |
|
SU1288580A1 |
| Устройство для электромагнитного контроля механических свойств движущихся ферромагнитных изделий | 1985 |
|
SU1326345A1 |
СПОСОБ ЭЛЕКТЮМАгаИТНОГО КОНТРОЛЯ МЕХАНИЧЕСКИХ СВОЙСТВ ДВИЖУЩИХСЯ ФЕРРОМАГНИТНЫХ ИЗДЕЛИЙ, заключающийся в том, что контролируемое изделие в процессе его движения намагничивают магнитным полем, преобразуют изменение магнитной индукции, вызванное движением изделия в области, расположенной за намагничивающим полем, в электрический сигнал, интегрируют его и результат интегрирования используют при определеюш механических свойств изделия, отличающийся тем, что, с целью повышения достоверности контроля, в злектрический сигнал преобразуют изменение магнитной индукции в области, расположенной на расстоянии не менее четверти длины контролируемого изделия, регистрируют моменты времени достижения злектрическим сигналом экстремумов противоположной полярности и иулевого 9 значения в промежутке между зкстремумами, а механические свойства зделия определяют по совокупности результатов зарегистрирован- . ных моментов и интеграла электрического сигнала. со О5 со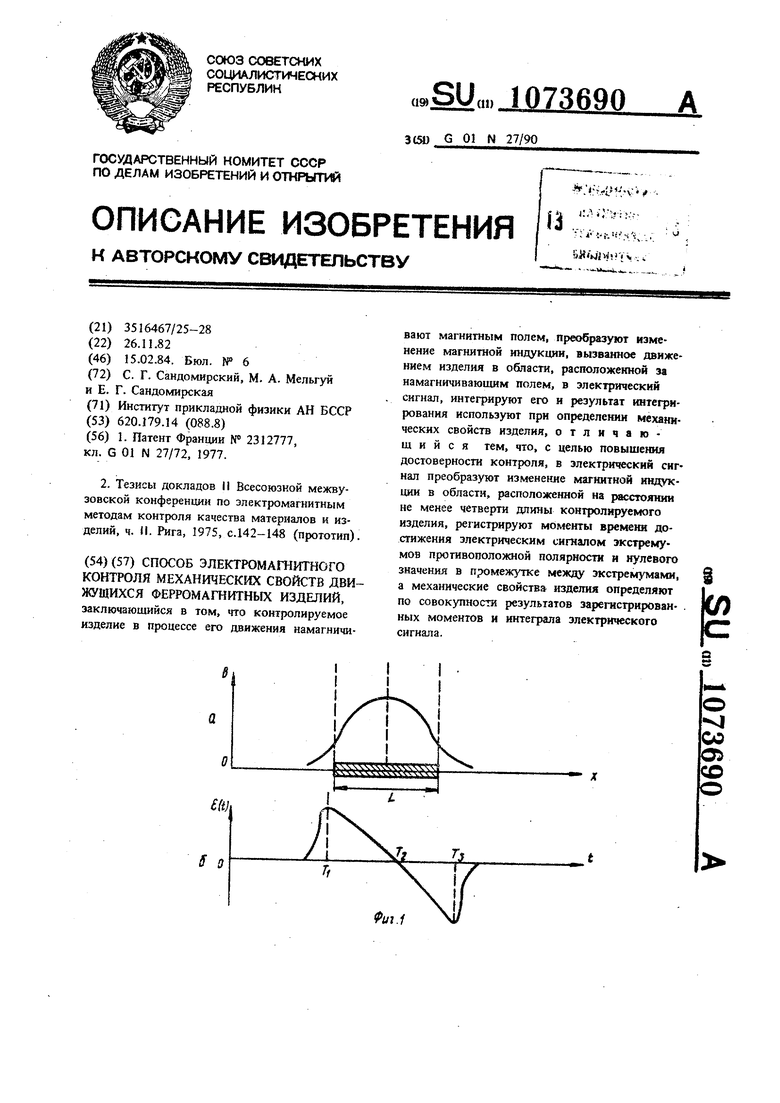
фиг.2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ПОДДОН ДЛЯ СБОРА ЖИДКОСТИ | 2006 |
|
RU2312777C1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Шеститрубный элемент пароперегревателя в жаровых трубках | 1918 |
|
SU1977A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Тезисы докладов II Всесоюзной межвузовской конференции по электромагнитным методам контроля качества материалов и изделий, ч | |||
| И | |||
| Рига, 1975, с.142-148 (прототип). | |||
