110 Изобретш1Ив касается устройства цля интерполавдии в периодических распред&литепях, например интерференциальных:, которые имеются в оптических измерительных устройствах для измерения величин: пути, угла, показателя преломл&ния, а также производных от них величин силы, давления, скорости твердости, соотношения компонентов смеси, концент рации в т.д. Особой областью применения устройства являетсй применение для интерференциальных измерений, если требуется очень высокая разрешающая способность. Интерполяционные устройства служат для разделения периода первичного сигна ла на эквидистантные расстояния. Лля этого разделения самые известные интерполяционные устройства требуют два первичных сигнала М., х и X. cos л . При прохожиа1ии через нуль интер; полированных аналоговых сигналов Запус каются с помошью триггеров импульсы, вследствие чего получается эквидистант ное раздел@1ие. Ошибки интерполяции появляются, если наступаетсмешение прохождений через нуль без изменения измеряем величины. Такие ошибки интерполяции могут быть вызваны изменениями параметров пер вичного сигнала: амплитуды, фазы, постоянной составлякяцей и спектра. Для характеристики известных теошических решений приводятся два примера Сетевс интерполятор ( Johanrisen, ТН.: Zum Verhalten der Signalperioden eines Theodoliten mit elektroop tischer Kreisteilablesung,Universi -1 fo ЛП1 v« 17. .A J«..... tat Bonn, 1967), использует наложение напряже-. , НИИ пе эвичных сигналов {/ и 1/2 и их отрицаний в подходящих сетях на сопротивленияЕх, чтобы из этого получить про хождения через нуль и, таким образом, .точки интерполяции. Этот интерполятор пригодез для малых факторов интертояяаии. Изменения ампяи-г туды, фазы и постоянной составляющей вызывают ошибки интерполяции., Известен также электрсданолучевой интерполятор, с помошью которого дости гаются более вь(сокие факторы интерпол ции. {Tr tscher О.: ОЪег Fragen der digitalen WegmeSsung mit fotoelektrischen WegnseBgerMten hoher Auf 16sung, Optik 28, Heft 8, 1968/69; Trotscher 0.: Einrichtung zur Interpolation DE-AS 1266989). Зцесь в основу положен принцип, два на ЭО смещенных первичных сигнала образуют вращакидееся поле с установленным направлением вращения. Напряже-- ния сигналов подаются на отклоняюяше пластины электронно-лучевой трубки, и полный оборот электронного луча соответ ствует сильно увеличенному периоду растра. Если вместо люминесцентного экрана применяют проводящие растровые диски, то получают интерполированные выходные сигналы. Эффективность такой схемы ограничивается геометрией трубки, ошибками юстировки растровь1х дисков, а также точностью катодной, решетчатой и анодной системы. Изменения амплитуды, фазы и постоянной составляющей вь;зывают и здесь (D отличии от изобретения ) ошибки интерполяции. Цель изобретения заключается в том, чтобы интерполировать изменяющиеся в зависимости от измеряемой величины периодические распределения интенсивности с высокой степенью интерполяции ( 10О), причем затраты технических приборов не зависят от высоты степени интерполяции, а работоспособность независима от вида периодического распределения,. Устройство функционирует безошибочно и в том случае, если изменяется дифференциальное значение между максимальной и минимальной интенсивностью (при интерференциальных распределениях дифференциальное значение между максимальной и минимальной интенсивностью облучения), как и абсолютное значение ин- тенсивности (при интерференциальных рас- пределени51х абсолютное значение интенсивности облучения-) периодического рас-- е пределения. Хотя приблизительные значения (импульсы грубого регулирования) и интерполированные точки значения (импульсы точного регулирования) образуются отдельно в раздельных системах, за счет соответствующей логической операции, даже при относительно большой неопределенности расположения импульсов грубого регулирования :(неопределенность при включении включающего фронта импульса) происходит безошибочное суммирование импульсов грубого и точного регулирования. Наряду с возможностью достижения высокой степени интерполяции можно уотанавливать любую степень интерполйции простым образом, В основу изобретения положена зацача создания интерполяционного устройства, которое на основе изменяющихся в посто янной зависимости от измеряемой велимилы распределений интенсивности интер поляции при сравнительно малых затратах технических приборов и высокой нацежкости в эксплуатации. Такие периодические распределения интенсивности выступают, например, в интерференциальных измерительных устройствах. Так можно посредством распо ложения интерферометра, который использует интерференции одинаковой толщины, проводить измерение длин. Если оба интерферометрических зеркала образу ют маленький угол и одно зеркало изменяет свое положение в направлении света, параллельно самому себе, тогда возникает такое периодическое распреде ление интенсивности. Здесь изменение интерференциального порядкового числа является точной мерой для измеряемой величины. Расстояние между двумя со седними максимумом и минимумом соот ветствует одному порядку. Для определения изменения измеряемой величины надо определить предназначенное количество целых порядков и дробных час/ей. Количество целых порядков представляет собо в этом случае приблизительное значение, а остающиеся дробные части - точное значение. Таким образом, в этом случае приблизительное значение - целое кратаое одного порядка. Конечно, можно выбрать такое сопротивление, что приблизительное значение соответствует целому кратному любого значения порядка. Поставленная цель достигается тем,. что к фотоэлектрическим считывакяцвм элементам, в частности к фотоэлёктр ческим приемникам, подключают оаив уси литепь. один триггер,один счетчик грубо го отсчета и одну следящую логическую схему. Другой триггер включается между усилителем и следящей логической схемой Необходимые контакты соединены с ограничительной логической скемой.связанной со следящей логической схемой. К следящей логической схеме присоединяется схема управления двигателем. Схема управления двигателем соедйь няется с двигателем, снабженным передачей. Кроме того,предусматривают ходовой винт и деталь с внутренне резьбой между передачей и контактами. 1 412 К цифровой систе у1е кзмере11;ш цлины илд утла подключается счетчик точного отсчета. Обработка сигналов между считыванием и индикацией измеряемой величины выполняется следующим образом. Фотоэлектрические считывающие элементы, например фотоэлектрические приемники, которые считывают распределение интенсивности k началу, после или во . время измерения, поворачиваются друг к другу относительно картины распределения интенсивности так, что считывают; щие элементы позиционируются в определенных положениях относительно опр&деленных эквидистантных исходных точек I распределения интенсивности. Такими оп- определенными эквидистантными, исходными точками могут быть сами максимуме и минимумы или любые точки, котррые выбираются на постоянном расхзтоянвм от них. Считьшающие элементы служат, вопервых, в соединении со счетчиком, который следует назвать счетчиком грубого отсчета, для определения приблизительного значения, а, во-вторых для следящего управления. Посредством этого управления считывающие элементы приводятся в определенное положение относительно эквидн стантных исходных точек. Эти положения называют местами слежеяия. Отно-сйтельный путь, проходящий во время процесса слежения между считывающими .эло ментами и картиной распределения интеН сивности, можно измерить посреаством известных приборов для измерения длины или утла. Если измеряют относительнь1й путь, например инкрементально, то регистрируются соответствующие точному значению импульсы, далее называемые точными импульсами, в следукицем счетчике, так называемом счетчике точного отсчета. Однозначную взаимосвязь между приблизительным значением (так называемые грубые импульсы) и точным значением (точные импульсы) - как при ошибочном положении вклю1чаюше о фронта импульса гак и бесперебойную работу в любой об ласти измерения достигают следующим образом. Предполагают, что между двумя cooedними местами слежения находится Л1р6ое отличное от нуля постоянное количество грубых импульсов. Количество точных импульсов . , кото рые соответствуют одному грубому им-, пульсу, получается при делении количества точных импульсов f , которые соот ветствуют расстоянию между двумя со сеаними местами слежения, на количество грубых импульсов X, которь:е имеюп ся между соседними местами слежения, т.-е.„ , f LN . . G/ X При определении napasvievpOB устройст ,. тветственных за создание грубых им: ульсов и мест слежения, надо учитыват требование, чтобы допустимая область положения грубых импульсов, которая получается за счет неопределенности включающих фронтов импульсов, и до- „ пустимая область, результирующаяся из неопределенности слежения в определенных местах слежения, не перекрывались. Грубые и точные импульсы считываются в зависимости от направления. Знак, с которым точные импульсы должны складываться с грубыми импульсами для образования результата измерения, получается из сяедукнцего определения: управляется система слежения при опре деленном относительно участка картины распредело1ии интенсивности так, что появляются позитивные грубые импульсы а все точные импульсы, поступающие при этом направлении управления, счи- тают отрицательными и наоборот. Так как после или во время изм&нения измеряемой величины, когда до стигнуто одно из соседних мест слеже ния, либо сумме грубых импульсов внутр области слежения дает О и регистриру ется значение слежения (количество точ ных импульсов), либо из суммы всех грубых импульсов, которая представляет значение, соответствующее расстоянию между двумя соседними местами слежен вычитается значение слежения, и происх дит безошибочная индикация. При этом безразлично, в каком из соседних мест слежения происходит слежение. Благоприятные соотношения относительно времени слежения получают, если приблизительно в середине между двумя соседними местами слежения принимают рещение подойти, к левому или правому месту слежения. При соответственно мёдл«1ном изменени измеряемой величины может наступить случай, когда механическая часть следящего устройства, которая несет все считывающие элементы, имеет синхронный ход с движением смшцения распределения интенсивности. Но, так как участок изоСражения распределения интенсивности ограничен относительно поверхности, то считывающие элементы выходят из участка изображения. В этом случае область изменения была бы ограничена размер-;1.,и участка изображения. Область измерения можно любым образом расширить, если разместить ограничительные KOHTaE fbij которые вызывают, то, что механическая часть следящего устройства, которая несет считывающие элементы, отводится назад почти до середины участка изображения. Во BJзeмя отвода назад следящее уп- равление блокировано. После отвода назад включается управление ограничения и снова запускается механизм слежения. При этом неважно точное положение контактов. Это воздействие извне, которое обуславливает локальное перемещение считывающих элемен.тов после или во время изменения значения измерения, не влияет на правильную индикацию знач&ния измерения, так как во время процесса управления регистрируются также значения в счетчика точного отсчета с обратным знаком, как и значения в счет чике грубого отсчета, и исключается влияние управления при образовании ре« зультатов измерения. На фиг. 1 приведена принципиальная схема для осуществления способа; на фиг. 2 - последовательность сигналов. К четырем фотоэлектрическим прием никам 1 (фиг. 1) попарно дифференциального включения подключаются усилитель 3, триггер 4, счетчик 8 грубого отсчета и следящая логическая схема 7. Триггер 5 соединяется как с усилителем 3, т1к и со следящей логической схемой 7. Контакты 16-18 подведены к ограничительной логической схеме 6, связанной со следящей логической схемой 7. Следящая логическая схема 7 уплавлеет двигателем Ю, к которому присоединен двигатель 11. Передача 12, связанная с двигателем 11, соединена с ходовым винтом 13 и деталью 14 с внутренней резьбой. Кроме того, к цифровой системе измерения длины и угла подключается счетчик 9 точного отсчета. Устройство работавт следующим об- разом. Четыре фотоэлектрических приемника 1 считывают интерференционную картину 2. Положение четырех приемников (фиг.2а) определяется с помощью двигателя Ц, передачи 12, ходового винта 13 и уста ноБОчного элемента 14 с внутренней резьбой, в котором жестко прикреплены поступательно передвигаемые приемники На фиг, 2в показаны поступившие с приемников 1 и усиленные усилителями 3 напряжения U и U . Характеристики напряжения, представленные (фиг. 2в) получаются при смешении интерференционной картины 2 при изменении измеря емсй величины. Напряжения преобразуют ся в прямоугольные сигналы посредством триггеров 4 и 5. С триггера 4 поступа ют последовательности сигналов, служащие для грубого счета (фиг. 2с), При этом целые периоды считывают ся только на отрицательных включающих фронтах сигнала х-. Количество импуль сов, подсчитанных таким образом,счетчи ком 8 грубого отсчета, представляет приблизительное значение. Триггер 5, состоящий из дврс ступеней сравнения, преобразует сигнал U последователь ности сигналов Xj и-х. (фиг. 2 ). Со ответственно (фиг. 2 ) места слежения обозначены состоянием. 1. Для ограничения области слежения установочный элемент 14с внутренней резьбой, контакты 16 и 17 расположены на концах облас ти. Если приводится в действие боковой контакт 16 и 17, то логическая схема ограничения со значе нием сигнала yif- L( управляет перемен ,щением в направлении середины области слежения установочного элемента 14 с внутренней резьбовой. Выходной сигнал логической схем 6 ограничения принимает значение О. и логическая схема 6 ограничения отключается, если установочный элемент 14 с внутренней резьбой находится в середине области, т.е. если приведен в аействие контакт 18. В логической схеме 7 сяв. жения сигналы ..,,x логически...преобразуются в сигналы х, и хп, причем X, означает левый хрц детали 14 с внутренней резьбой, а х jj - правый ход детали 14 с внутренней резьбой, (фиг.20 е, f) следующим образом - Y2 При X Xj х. - U деталь 14 с внутренней резьбой останавливается на месте слежения. Выходные сигналы логическое схемы 7 слежения управляют двигатель 11 посредством управления двигателем Ю. Вращение двигателя 11 переносится с помощью передачи 12 и ходового винта 13 на фиксированную от поворота деталь 14 с внутренней резьбой, которая движет ся поступательно. Для определения веп чины поступательного движения, которое практически представляет точное значение, вращательные движения ходового винта 13 преобразуются инкрементал ным датчиком 15 с ротационным принципом действия в точные импульсы. Точные импульсы регистрируются в счвтч чике 9 точного отсчета с правильными знаками. Зризнано изобретением по результатам экспертизы, осуществленной ведомством по изобретательству Германской Демокраи тячвской Реснубликя,
Апплитуда
Нипрвжение

| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕОБРАЗОВАТЕЛЬ УГОЛ—КОД | 1971 |
|
SU427368A1 |
| Устройство для снятия отсчетов | 1986 |
|
SU1370459A1 |
| Устройство для управления телескопом на альтазимутальной монтиолвке | 1974 |
|
SU510691A1 |
| Устройство для точного отсчета углоизмерительных приборов | 1980 |
|
SU964440A2 |
| Преобразователь перемещения в код | 1980 |
|
SU886025A1 |
| Устройство для считывания графической информации | 1974 |
|
SU524204A1 |
| УСТРОЙСТВО для КОДИРОВАНИЯ и ВОСПРОИЗВЕДЕНИЯ КАРТ ПОТЕНЦИАЛЬНЫХ ПОЛЕЙ | 1968 |
|
SU208345A1 |
| Цифроаналоговая следящая система | 1989 |
|
SU1700536A1 |
| Устройство для центрирования полосы относительно оси прокатки на непрерывном широкополосном прокатном стане | 1981 |
|
SU975129A1 |
| Устройство для считывания графической информации | 1978 |
|
SU746613A1 |
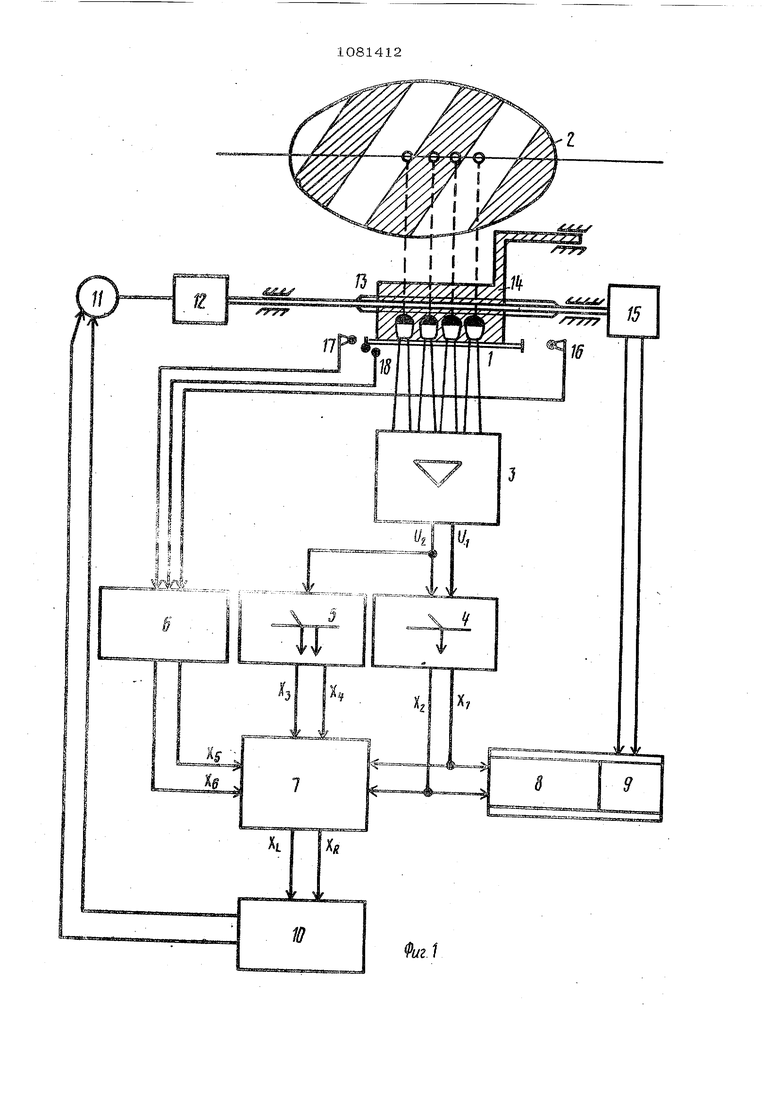
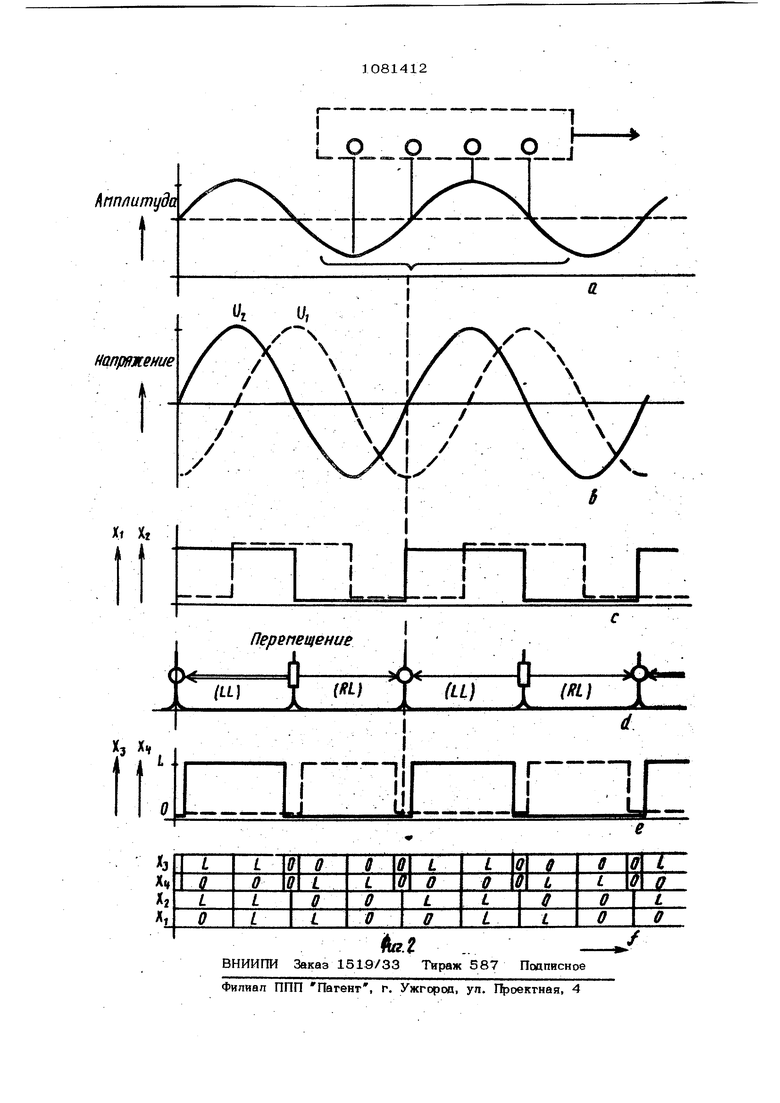
УСТРОЙСТВО ДЛЯ ИНТЕРПОЛ Я1ШИ« соперисашее из внтерфероме1ь.; {Шческой сясемы, фотоэлекфЕгаеск1{х при- емншсов усилителей, триггеров, логических схем, счетчикои, цифрювых cwoveM |(ля измерения алины или угла и привоц- И . «. - г,.-:«,Л ных механизмов, отличающееся тем, -ЧТО фотоэлектрические считывающие, элементы, в частности фотоэлектрические приемники 1, поаключены к усилителю 3, триггеру 4, счетчику грубого отсчета 8 и следящей логической схеме 7, триггер 5 подключен к усилителю 3, триггер 5 соединен со следящей логической схемой 7, контакты 16,17 и 18 соединены с о ограничительной логической схемой 6, управл 1ие двигателем 10 соединено с двигателем 11, к двигателю 11 подкл1очена передача 12, а между передачей 12 и контактами 16 и 17 расположены ходовой : винт 13 И деталь 14 с внутренней Q 9 резьбой, и к цифровой системе для измерения длины или угла подключен счетчик (Л 9 точного отсчета.