1
Изобретение относится к астроприборостроению и может быть использовано при построении систем управления телескопами.
Известны устройства для управления телескопом па ал1Лазимутальной моптировке, содержапще кпопочный блок управления, установленные па осях телескопа два цифровых следящих привода, входы которых электрически связаны соответственно с двумя выходами вычислительного блока, третий выход которого подключен ко входу третьего цифрового следящего привода, выход которого кинематически связан с поворотным столом и установленным на нем фотоэлектрическим анализатором и двумя каретками, кинематически связанными с щаговыми двигателями двух соответствующих блоков перемещения каретки. В известных устройствах от управляющей машины па цифровые следящие приводы телескопа поступают сигналы, пропорциональные расчетной скорости измерения значения азимута А и зенитного расстояния Z наблюдаемого объекта, а на следящие приводы, компенсирующие изменение параллактического угла, поступает его расчетная величина. Фотоэлектрический анализатор (звездный датчик), установленный на поворотном столе, непрерывно следящий за одной гидировочной звездой, корректирует положение телескопа по осям .4 и Z. Известные устройства характеризуются нониженной точностью слежения за объектом из-за невозможности выявления фактической ощибки компенсации вращеиия ноля, ноявляющейся вследствие несовпадения
центра врап1енпя поля с осью вращения поворотного стола, являющейся следствием ощибкн наведення по А и Z. Погрешности чисто программпой обработки параллактического угла, особенно щутимые на краю поля, воспринимаются фотоэлектрическим анализатором и приводят в свою очередь к еще большему отклопению исследуемого объекта от центра поля, вследствие ложного срабатывания приводов А и Z.
Целью изобретения является повышение точности управления телескопом. В описываемом устройстве это достигается тем, что оно содержит регистр сдвига, триггер и два логических элемента «И, выходы которых подключепы к соответствующим счетным входам регнстра сдвига, единичный вход которого связан с первым выходом кнопочпого блока управления, первый выход - с одним из входов первого логического элемепта «И, второй
выход - с одним из входов второго логического элемента «И, второй выход кнопочпого блока управления соединен с единичным входом триггера, первый выход которого связан с первым входом вычислительного блока, со вторым входом которого соедипси второй вход триггера и выход вторсго логического элемента «И, третий и четвертый входы вычислительного блока соединены соответственно с первыми выходами обоих блоков перемещения каретки, вторые, третьи и четвертые входы которых подключены к одноименным выходам кнопочного блока управлепия, пятые, шестые, седьмые FI восьмые - к первому и второму выходам регистра сдвига, первому п второму выход.ам триггера соответственно, ие)вые входы соединены со вторым и третьим 1ходами второго логического; элемента «И п двумя врлходами фотоэлектрического анализатора соответственно, вторые и третьи выходы каждого блока не)емен1,е1П1я каретки подключены соответстненно к пятому, шестому, седьмому и 1зосьмому входам вычнслительпого блока, а ко второму и третьему входам первого логического э.темента «И подсоединены соответственно четвертые выходы блоков иеремеп ения каретки; кроме того, блок перемепдеиия каретки содержнт два элеме1гга совпадения, первые входы которых обязаны с первым выходом блока перемеп1,еиия каретки, вторые входы -- с трет1 им н чет ертым входами блока перемещения каретки соответственно, два регистра, входы которых связаны с выходамн соответствуюнцгх элементов совпаде 1ия, обпуляющие входы соединеиы со вторым входом б.тока перемещения каретки, а выходы подключены соответственно ко второму и третьему выходам блока неремегнения каретки, логический элемеугг «ЗИ-ИЛИ, элемент сравиеиия, коммутатор и счетчик, выход которого и первый вход элемента сравнения под);лк:)чены к первому выходу блока перемещения карсткп, выход элемеита сравпеиия е(;едннен с четвертым выходом блока перемегпсипя кареткп и через коммутатор -- со входамп inaroBoro двигателя и счетчика, обнуляю1ЩШ вход которого связан со вторым входом блока перемещения каретки, три входа первой группы входов логического э.чемента соединеиы соответствегпю со вторым выходом, пятым п седьмым входами блока перемещения каретки, три входа второй груииы входов - с третьим выходом, пятым и восьмым входами, два входа третьей rpyntn i --- с первым п шестым входами блока перемепич1ия кареткп, второй вход элемента сравнения соединен с выходом логического элеме1 та «ЗИ-ИЛИ.
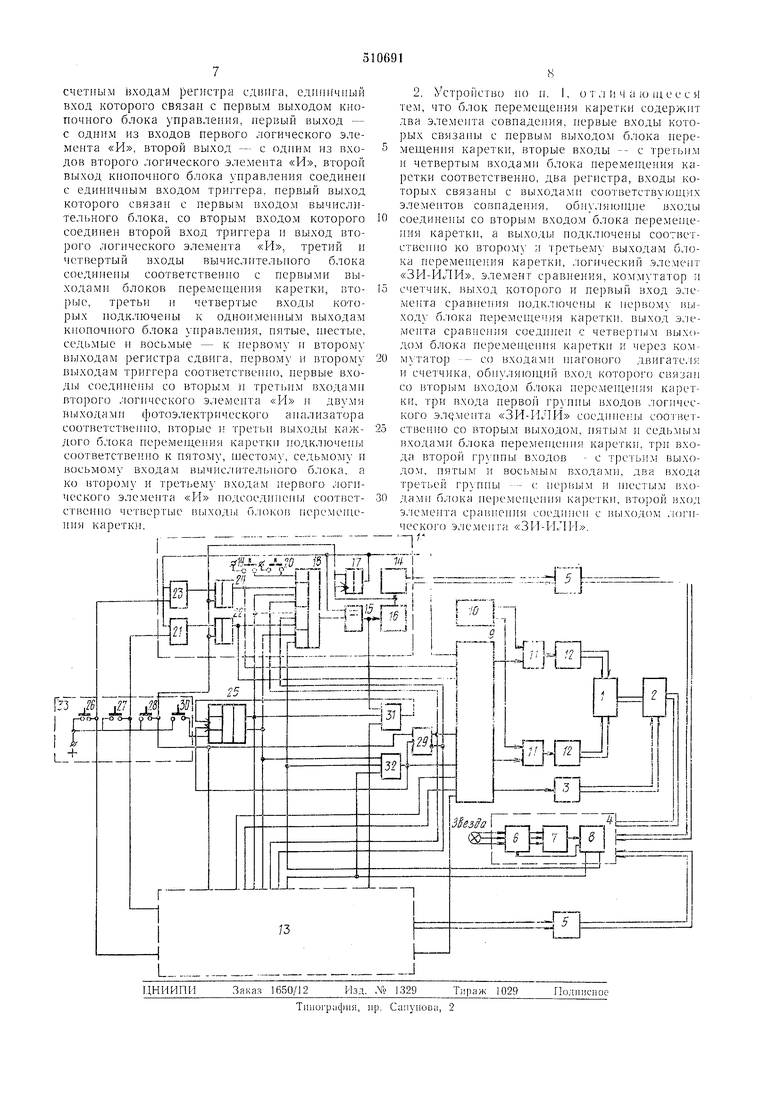
На чертеже представлена функциональная схема устройства для управления телескопом 1 па альтазимутальпой монтировке, оспапхенного поворотпым столом 2, расположеннылт, например, в стакаие первичного фокуса телескопа. Поворотный стол 2 разворачивается на парал.тактический }то,1 Р посредством нифрового следящего привода 3. Иа поворопюм 2 размещается фотоэлектрпческ.чй и илазатор 4, который иеремещается отиос ггельно поворотпого стола 2 в прямоугольной сисгеме координат Л и Y кареткамн 5.
Свет от звезды через модулятор 6 иоиадает
на фотоголовку 7 анализатора 4; на выходах его электрониого блока 8 формируются релейные сигналы, информирующие о положении анализатора 4 по отношению к звезде, причем еслп анализатор 4 направлен точно па звезду, то . н ДУ. При отклонении положения анализатора 4 относитСоТьно звезды но соответствующей координате формируется сигнал «О и сигнал, характер)гзуюш,ии з) рассогласования.
Телескоп уи)авляется по сн налам вычнслиге.тьного блока 9 и узла полуа гго.матической ко)рекции 10 иоложеппя телескопа через сумматоры 11 посредством цифровых следяигих приводов 12, осуи1.ествляющих вращеппе телеекопа по осям А и Z.
Каждый из блоков перемещер1ия кареток 13 содержит шаговый двигатель 14, уиравляемый по сигиалам элемепта сравнеппя Jo посредством коммутатора 16.
На выходе элемеита сравнения 15 формируется сигнал «1 в случае равенства кода счетчика 17 коду, поступающему с выхода логического элемепта «ЗИ-ИЛИ 18. При пажатии кпопки 19 на входе элемепта сравнения 15 формируется код, во всех разрядах которого сигнал «1, при пажатип кпопки 20 формируется код, во всех разрядах которого сигпал «О.
Таким образол, нажатием на кнопки 19 и 20 можно задавать неремещение кареткп в разные стороны.
Элемент совиадения 21 пропускает код сч.етчика 17 на вход регистра 22, а э;гемент совпадения 23 -- на вход регистра 24.
Регист) сдвига 25 имеет вход стаповкп в при этом па первом выходе устанавливается спгпал «1. Ирп подаче хотя бы па одии из счетных входов сигнала «1 состояние регистра сдвига 25 .меняется, т. е. на первом г ыходе устанавливается сигнал «О, а на втором -- сигнал «1. При подаче следующего сигнала на счетный вход, регистр сдвига 25 переходпт в состояние, ири котором сигнал на нервом вьгходе -- «1, а на второ.м вьгходе - «О и т. д.
Кнонка 26 - - «Запоминание звезды I -воздействует па элеме1Г1 совпадения 23, а кнопка 27 -- «Запо.минанне звезд) И -- на элемент совпадения 21.
При иажатпи на кнопку «Установка нуля 28 производится сброс на «нол1) регистров 22 II 24, счетчика 17 и триггера 29. При нажатии на кнопку «Пуск коррекции 30 регистр сдвига 25 устаггавливается в состояиие «1.
На счетгП)1е входы регистра сдвига заводятся спгпалы с логических элементов «И 31 п 32. Управление осуи1естиляется с киоиочного блока управ.теиия 33.
Вычислительный блок 9 по исходным коорд 1натам наб;1юдаемого , введенным в пего, производит расчет текуии-гх координат Л н Z 11аб.подаемого объекта и иараллактпческо14) угла Р. И11ф 1овые следя1цне приводы 12, включаюигие в себя цифровые датчики угла.
установленные на осях Л и Z телескопа I и на оси вращения поворотного стола 2, отрабатывают эти значения. С помощью узла полуавтоматической коррекции 10 оператор, наблюдающий участок неба, на который наведен телескоп, на экране видеоконтрольного устройства, расположенного на телескопе, приводит исследуемый объект в центр видеоконтрольного устройства за счет разворота телескопа 1 на углы, рассчитанные путем суммирования посредством сумматоров И расчетных значений координат Л и Z с величинами углов коррекции. Тем самым выбираются ошибки наведения телескопа 1 по осям Л и Z. Далее оператор, воздействуя кнопками 19 и 20 на шаговые двигатели 14, приводит каретки 5 в центр видеокоптрольного устройства, после чего нажимает на кнопку «Установка нуля 28. Тем самым обнуляются счетчики 17, регистры 22 и 24, а триггер 29 устанавливается в состояние «1. После этого оператор переходит устройство в режим «запоминания координат гидировочных звезд. Для этого он, выбрав первую гиднровочную звезду на экране видеоконтрольного устройства, осун1,ествляет наведение на эту звезду путем перемещения кареток 5 нажатием кнопок 19 и 20. В момент, когда анализатор 4 направлен точно на выбранную гидировочную звезду, оператор нажимает на кнопку 26, тем самым устройство запоминает в регистре 24 код счетчика 17, который равен количеству шагов, совершенных шаговым двигателем 14, т. е. координаты Лю (УЮ) соответствующей расстоянию, на которое первая гидировочная звезда отстоит от исследуемой звезды, находящейся в это время в центре видеоконтрольного устройства. Затем оператор выбирает на экране вторую гнднровочную звезду и, совершая аналогичные манипуляции кнопками 19 н 20 и кнопкой 27, производит засылку в регистр 24 координаты (YZO), соответствующей расстоянию, на которое вторая гидировочная звезда отстоит от исследуемой звезды. После этого оператор нажатием кнонки 30 переводит устройство в автоматический режим «обегаюи1.ей фотоэлектрической коррекции. При этом регистр сдвига 25, который до этого был установлен в состояние «О, переводится нажатием кноикн 30 в состояние «1, задающее этап автоматического грубого наведения анализатора 4 на звезду. Логический элемент «ЗИ-ИЛИ 18 иропускает на вход элемента сравнения 15 код, хранящийся в регистре 24. Этот код сравнивается с текущим показанием счетчика 17, формируя на выходе элемента сравнения 15 сигнал соотБетствуюн.его знака, тем самым и,1аговый двигатель 14 осуществляет иеремеН1,ение каретки 5 до тех пор, пока текущее значение на выходе счетчика 17 не будет равно коду АЮ.
.Аналогично работает н блок 13 перемен1ения каретки по осу Y.
Таким образом, этап автоматического грубого наведения анализатора 4 заканчивается.
когда анализатор 4 будет выставлен в положение АЮ, Kjo, при этом срабатывает логический элемент «И 31, переводя регистр сдвига 25 в состояние «1 на втором выходе. В этом положении регистра сдвига 25 задается второй этап этого режима - точное наведение анализатора 4. При этом сигналы анализатора 4 через логический элемент «ЗИ-ИЛИ 18 поступают на вход элемента
сравнения 15, тем самым управляя перемещением каретки 5. Когда в результате этого анализатор 4 будет направлен точно на первую гидировочную звезду, срабатывает логический элемент «И 32 и по этому сигналу
вычислительный блок 9 воспринимает состоянне триггера 29, которое свидетельствует о том, что вводится информация о нервой звезде: /YT, )т - коорднната звезды на текущий момент времени н Лю, }ш - начальная координата звезды. По сигналу логического элемента «И 32 триггер 29 переводится в состояние «О, соответствующее работе по второй 315езде, а регистр сдвига 25 в состояние «1 на нервом выходе. Далее устройство аналогично
описанным выше этапам грубого и точного наведения на первую звезду, осуществляет грубое н точное наведение на вторую звезду, которое заканчивается также срабатыванием логического элемента «И 32, по которому вычис.1ите;1ьный блок 9 воспринимает информацию о второй звезде: Ат, FT и Xzo, YZQ; после того устройство переводится в режим наведения вновь на первую звезду и т. д. Такнм образо.м, оиисываемое устройство при
наличнн только одного фотоэлектрического анализатора и программного управления, позволяет повысить точность управления телескопом за счет режима обегающей фотоэлектрической коррекции по двум звездам, разделить
ошноку слежения телескопа на составляюнцю по /1 и Z и ошибку компенсации параллактического угла и ввести их в закон управления цифровыми следяшими приводам/, отрабатывающими значения этих УГЛОВ.
Ф о 1 м у л а изобретения
1. Устройство для управления телескопом на альтазимутальной монтировке, содержаи1.ее
кноночр ый блок унравления, установленные на осях телескопа два цифровых следящих привода, входы которых электрически связаны соответственно с двумя выходами вычислительного блока, третий выход которого подключей ко входу третьего цифрового следящего привода, выход которого кинематически связан с поворотным столом и установленными на нем фотоэлектрическим анализатором и двумя каретками, кинематически связанными
с HiaroBbiMH двигателями двух соответствуюHUix блоков перемен,ения кареткн, отличаюН1ееся тем. что. с целью повышения точностн управления, оно содержит регистр сдвига, триггер и два логических элемента «И, выходы которых подключены к соответствующим
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления телескопом | 1979 |
|
SU826273A1 |
| Система управления телескопом | 1979 |
|
SU924671A1 |
| Устройство для управления телескопом | 1974 |
|
SU511559A1 |
| Устройство для управления положением телескопа | 1975 |
|
SU552592A1 |
| Система управления телескопом | 1978 |
|
SU805251A1 |
| Система управления положением телескопа | 1975 |
|
SU681418A1 |
| Система управления телескопом | 1984 |
|
SU1188699A1 |
| Фотоэлектрическая следящая система гидирования телескопа | 1984 |
|
SU1228068A1 |
| Устройство для управления наведением телескопа | 1974 |
|
SU560213A1 |
| Устройство для обнаружения и коррекции гнутой трубы телескопа | 1980 |
|
SU970295A1 |
