(54) УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ ГРАФИЧЕСКОЙ
ИНФОРМАЦИИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения координат точечных световых объектов | 1974 |
|
SU550658A1 |
| Устройство для управления адаптивным роботом | 1974 |
|
SU683899A1 |
| УСТРОЙСТВО для ВВОДА ГРАФИЧЕСКОЙ ИНФОРМАЦИИ | 1973 |
|
SU361465A1 |
| Устройство для определения координат точечных световых объектов | 1981 |
|
SU991455A2 |
| Устройство для определения коор-диНАТ ТОчЕчНыХ СВЕТОВыХ Об'ЕКТОВ | 1978 |
|
SU811302A1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ДЛИНЫ | 1998 |
|
RU2148789C1 |
| Интерполятор | 1978 |
|
SU798729A1 |
| Устройство измерения угловых флуктуаций оптического излучения | 1989 |
|
SU1707483A1 |
| Масштабно-временной аналого-цифровой преобразователь | 1980 |
|
SU900439A1 |
| Формирователь сигнала цифровой следящей развертки | 1980 |
|
SU936454A2 |
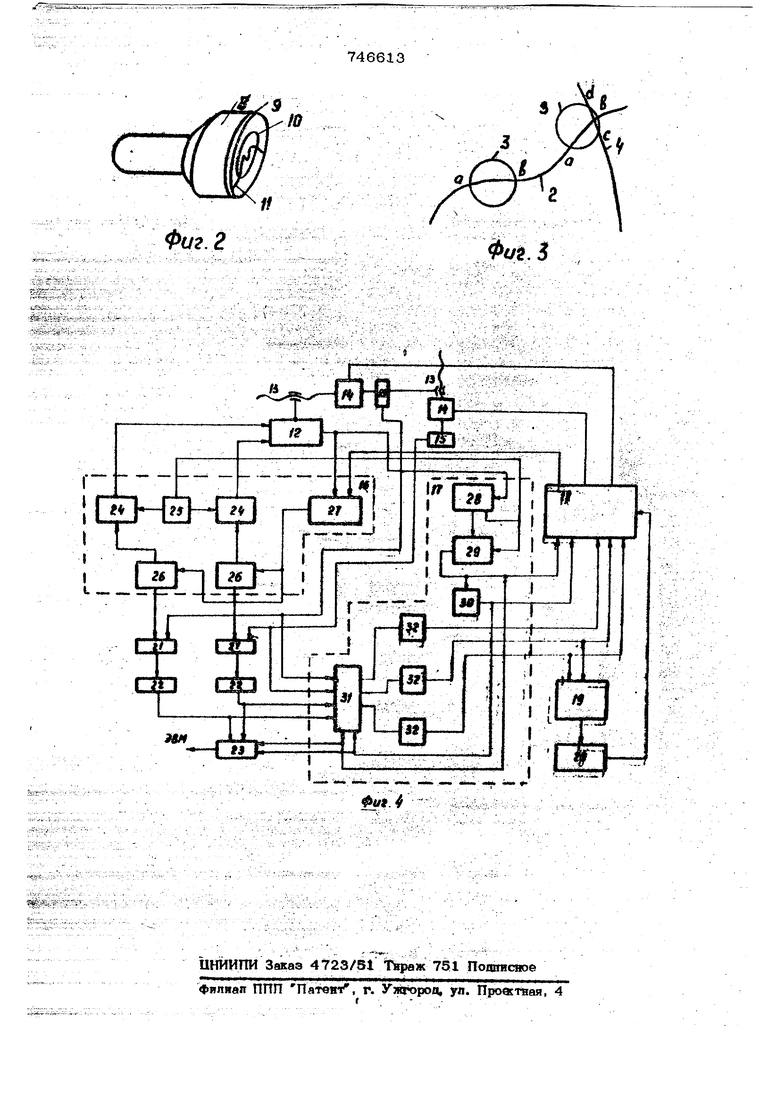
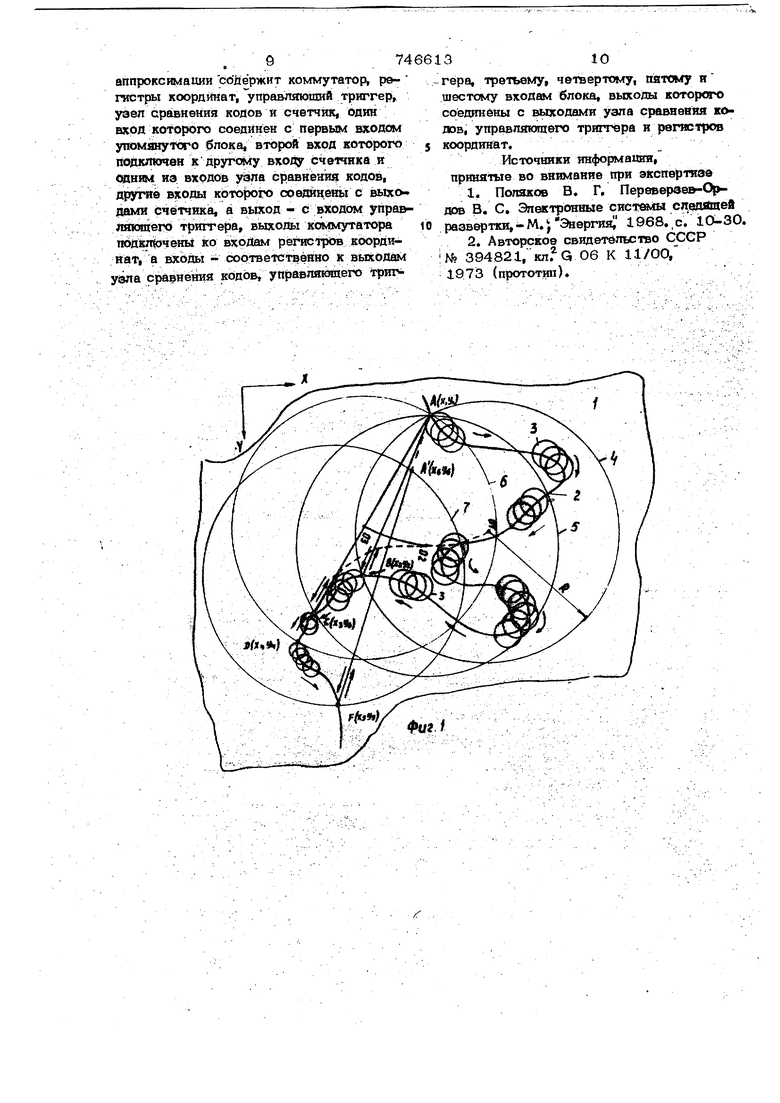
.- ; , ... - - :: . Изобретение относится к автоматике и в дчиспнтепьной технике, в частности к области преобразования графических изобр|&жёний в электрические сигнапы, и может ть исцюпьаовано в устройствах с 1й1Ы1эанн9 1з1афиков, чертежей, карт. Известны устройства Д71Я счи-иования Графической {гаформапш, основанные на мето&д спедязаеЙ развертки, и содержащие эпектронно учевую трувку, входы которой соединены с ёыхЬдами бпока разверт KB, генераторы, бннусного и косинусного вапряжевтЦ) и регистры юординат Ji. применение чисто электронных сэтедяпшх разверток на основе электроннохогчевых Т1зубок бегушего луча шр п&раяакяцнх телевизионных трубок не пое1во тшет с достаточно высокой точностью считывать графическую информашпо с носвтепей большого формата - чертежей влв карт.: Наиболее близким к иаобр|й нвк по теасвичаской сущвостн является втаъестное устройство для считывания графяческ(Л информации, содержащее фотоэлектрический преобразователь, механически связанный с приводами, соединенными с датчиками координат, первый н второй выходы которого подключены к входам фотоэлектрического преобразователя, выход которо го соединен с первым входом блока следящей развертк третий и четвертый выходы которого подключены к оДнвм ..из входов сумматоров, другие входы которых соединены с выходами датчиков координат, а вьрсоды - с входами буферных регвсрров, выходы которых подключены к дам блока обмена информацией 2. В известном устройстве фотоэлектрвн ческий преобразователь перемещается, вдоль края или оси отслеживаемой кривой по Ъсекоторой ломаной линии, параметтш которой обусловлены характеристикамя электромюсанической следящей системы перемещения фотоэлектрического преобрси зователя. При этом длина пуга, прохош могр фотоэлектрическим преобразователем при отслеживании кривой, больше этой кривой, а режим работы приводов перемещения фотоэпектрического преобразователя реверсивный, причем, изме Нбйив найравле1 ия вращения и величины скоростн вращения двигателей ПрйвЬдЬв определяется кривизной отслеживаемой кривой, точностью слежений и скоростью двшкения фотоэлектрическотч5 преобразователя вдоль отслеживаемой кривой и проио ходят с высокой частотой даясё при малы cjfropocfaic спёЖеНйя, что ограничиваетбыстродействие ; при -х итывании графической информации, Цепью изобретения йзлается повьйаение быстродействия. Достигается это тем, что онЬ содержи йатёрполятор, квадратичный функциональны гфеобразователь, блок дифференцирования и блок аппроксимаций, периьгй взюд кЪторого соединен с выходом фотоэлектрического преобрааоватёля, второй вход с пятым выходом блока спешпдей развертки, третий и ч1 1вёр1Ъ1й входы - с выходами буферных рййстров, пятыйи шестой входы - с вы зГсУйШТй датчиков йоординат, а выходы с управляврщимй входами бпока обмена шформагаёй ис cbotBeifei iyKxti входа; Ш йНтбр1 опятора, одни на KOtbpbix подйШЧены к входам тадратичного функционального преобразователя, выход кбторого соединен с входом блока дифференпирова 1шС выход которого подключен к Другому Шо1п8 Ш№рпопятора, в1ьпсоды которого 1ШШШШы сботеетстеённб с упрШляйщими вк;ОД15Мй привбдов и вторым входом ВяШа следяшей развертки. Кроме того, в уст ройстве графической информации etttftpbkbiiMairaif с6дерЖ1Ст Шстры координат, управляющий триггер, сравнения-кодов и счетчик, один вход которого соединен с первым входом упомн- . нутого блока, второй вход которого под piilf ДругШу 1йй11 садтаШа оа;ним ШМбД узла сравнения кодбв, друттяа jscffrast которого соединены с вьтходами счётчика, а выход - с входом управляющего триггера, выходы коммутатора подт1впты к входам регистров координат, а ЕкЬды соответственно к выходам узла сравввния кОдбв, управляющего триггера, третьему, четвертому, пятому и шестому входам бпоМ, выходы k5TOp6i4j соединены С выходами узла сравнения кодов; управ лакзщёго триггера и регистров координат. На фиг, 1 показана траектория двнжеввя сканирукярей апертуры фотоэлектрического преобразователя (диссежтора) относительно обслвживаемой кривой} на 2 - схе татичпо изображен диссектор на фиг. 3 - определение координат точки перезечения отслеживаемой кривой с гр&нидей рабочей зоны фотокатода диссектора на фиг. 4 изображена блок-схема устройства. На фиг. 1 приняты следующие обозначения носитель информации 1, отслеживаемая .кривая 2, сканирующая траектория 3 апертуры, диссектора граница рабо чей зоны 4 фотокатода диссектора (проекция на носитель 1) в исходном положении, центр 0, входная точка А пересечения кривой с границей рабочей зОны фотокатоДа, вькодная точка В пересечения кривой с границей рабочей зоны фотокатода граница рабочей зоны 5 фотокатчэда дирсектора после первого поворота рабрчей зонь фотокатода (поворачиваютдиссектор) вокруг вхошой точки А, 1Э2 - центр рабочей зоны, входная точ1 А, выходная точка С, граница рабочей зоны 6 фотокатода диссектора после второго поворота рабочей зоны фотокатода вокруг входной точки А, 03 Центр рабочей зоны, входная точка А, выходная точка Д граница рабочей зоны 7 фотокатода диссектора после перёМещёщщ центра рабочей зоны фотокатода (перемещение диссектора) в направлении вьрсодной точки Д вДопь annpbiKCUMHpyifOraieH. го отрезка АД, О4 - центр рабочей зоны, входная точка А , отходная точка F, О1, d2, 04 - траекторйзя Движений диссектора при отслеживании кривой 2 от точки А до точки F . Стрелками прйазаны движение сканирукйцей траектбрии вдоль . . слеживаемой кривой 1 и движении аперlypfci диссектора йдояь аппрОксимируюпщх отрезков АВ, АС, АД, А F. На фиг. 2-4 изображены корпус 8, проврачная входная планшайба 9, линия 1О границы рабочей зоны, энная на. планздайбу 9, отслеживаемая кривая 11 на планшайбе 9, а, j - точки пересечения траектории сканирования с отслеживаемой кривой, с,с}- точки пересечения траектории сканирования с линией границы рабочей зоны; фотоэлектрический преобразОватета, (диссектор) 12, ходовые винты 13 с гайками, приводы 14 координатных осей, датчики 15 коо1здинат диссектора, блок 16 слеудящей раавертки, блок 17 аппроксимашга, интерполятор 18, квадратичный функциональный преобразователь 19, блок 20 дафференшроваиия, сумматоры 21, буферные регистры 22, блок 23 обмена нвформапизй, преобразователи 24 код-напряжение (ПКН), генератор 25 сканйрукняей трашт« рии, редерсивные 26 Ьчвтчяки, уаел 2 7 управления движением апертуры, счетчик 28, узел 29 сравнения ода, управтмющий 3U триггер, коммутатор 31, регистры- 32 координат входной и выходной точек и координат центра:рабочей фотокатода. Счетчик 28, узел 29сравнения кода, управляющий триггер 30образуют схему фиксации концов аппроксимирующего отрезка. Устройство работает следующим обратном. В исходном состоянии апертура диссе тора 12, (см. фиг. 4) расположена во входной точке А {см фиг, 1) пересечени отслеживаемой кривой 2 с границей 10 рабочей зоны фотокатода 4 (фисг. 2), Координаты точки А занесены в один из регистров 32, координат. По сигналам из блока 16 следншей развертки апертура переметцается вдоль отслеживаемой кривой 2. При этом генератор 25 сканирующей траектории через ПКН 24 выдает соответствующие напряжения на отклонян шую систему диссектора 12, например, синусно косшусные напряжения в случае круговой сканирующей траектории, узел управления движением апертуры 27 но сигналам из диссектора 12 с помощью счетчиков 26 и ПКН 24 перемещает центр сканирукнцей трактории 3 вдоль отслеживаемой кривой 2. Координаты апертуры в подвижной системе координат дийсектора со счетчиков 26 бтклайываюту ся в сумматорах 21 с координатами-диосектора 12, поступающими с датчиков 15 и из сумматоров 21, и поступают на буферные регистры 22, из которых через 22 обмена иш|)Ормацйей координаты точек отслеживаемой кривой 2 передаются в ЭВМ. При этом схема фиксащга йонцов. аппроксимирующего отрезка, состоящая из счетчика 28 и узла 29 сравнения кодов и триггера 30 в блоке 17 аппроксимации, анализирует число точек пересечения сканирующей траектории с кршрй 2 за один цикл сканирования (число видеоимпуп зсов за один цикл сканир1Ования). При слежении за кривой 2 Ч1к;ло виДеоtiMT ntiCOB за цикл равно двум; и узел 29 сравнения кодов не выдает снтн1ала. Поспе того, как апертура подойдет вдоль кривой 2 к границе 4 |рабочей зоны фотокатодатснке В, число пересечений (вндеонмпут Сов) за один цикл сканирования будет брлыпё двух (см. фиг. 2). Таким образом, ;в момент нахождения апертуры диссвктоpa 12 в точке В узел 29 сравнения сфермирует сигнал, по котором изменит состояние триггер 30 направления двяжевийс апертуры. По этому сигналу и потенциапу триггера 3Q будет заблокирована выдача координат точек кривой 2 с блока 23 обмена информацией, координаты выходной точки В пересечения Kpimoft 2 с границей рабочей зоны 4 с регистров 22 будут через KCSvtMyTaTOp 31 переданы в регистр 32, а в третий регистр 32 будут переданы координаты центра рабочей зоны фотокатода диссектора 12 с датчиков 15 коорД1гаат диссектора 12. Координаты точек А и В передаются в интерполятор 1.8 и квадратичный функциональный преобразователь 19. Кроме того, в интерполятор 18 передаютс;а коордйН1аты точки 01 центра рабочей зоны фотокатода диссектора 1 2, В квадратичном фуйкииональнсм преобразоватепе 19 вйчисляется квадрат длины аппроксимирующего отрезка АВ всоответствии с выражением L(,) + (у ,- у , полученная в блоке 19 величина дифференцируется в блоке SP и по знаку производной определае ся направление поворота Диссектора 12 вокруг входной точки А рабочей зоны диссектора 12. По координате входной точки А - центр вращения, координате центра раёоч зоны точка 01 - начало дуги, постоянной величине 1 - радиусе рабочей зоны - радиусе окружности и знаке производной длины аппроксимирующего отрезка в интерполяторе 18 формируются сигналы круговой интерполяций, поступающие на приводы 13. ; Таким образом, центр рабочей зоны фото катода движется по дуге 01, 02, радиуса R .jaoKpyr точки А с началом движения в точке О1. Это движение эквивалентно по- . вороту рабочей зоны фотокатода -вокруг входной то4ки А. Одновременно с движенишг диссектора 12 по дуге 01-02 интерпопятЬр 18, управляемый потенциалом триггера 30 и сигналеял из узла 29 сра& нения кодов, Б соответствии с введенными, в него координатами точек А и В - входной и выходной, выдает сигналы линейной интерполяции на блок 16 следящей развертки и через схему 27 управления движeнI efM апертуры, счетчики 26 и ПКН 24 перемещает апертуру диссектора вдоль отреэica АВ та точки В в точку А до пересечения границы 4 рабочей э6нь1 фотокатода канирукицей траекторией 3. В момент пересечения координаты точки пересечения по сигналам узла 29 и триггера ЗО заносятся в соответствующий регистр 32, а З Hert) в интерполятор 18 и в квад1юти ный функциональный преобразователь 19. риггер 30 по сигналу из узла 29 нзм&ит состояние пО его потенциалу апертуры, Соотвотствш с сигналами из интерполя ; 7 ,. 74 тфа 18, будет перемещаться в обратном направлении от точки А в точку В. За вршя 1т емйц1энйя апертур «из точки В в точку А и обратно вдоль отрезка прямой АВ диссектор был повёрнут вокруг точки А ТИК, что его Шй-гр переместиттся .нз 01 в О2 и выходной точкой стада точка С. Поэтому после п{)ихода апертуры в точку S по сигналу конда гшнеЙногО интерполирований из йнтерполятора 18 схема 27 управления сдайжением аииртуры оЪз шествляет захват кривой 2, отслеживает кривую 2 от точки В до точки С - новой точки выхъдй, при 3TcJM вентиль 23 открыт и разреш.ает вьвдачу координат точек кривой 2 в ЭВМ. Посйё прихода апертуры в точку С снова повторяется движение апе{зтуры вдоль нового ,atjпроксимирующего отрезка АС от С к А и обратно до С и слежения от С к Д при этом движение диссектора осушестеляется &а счет повотора его вокруг входной точ ки А в соответствии со знаком и вёШчиной производной длины аппроксимирующего отревка. При равенстве этой производной нулю диссектор будет перемещаться вдоль аппроксимирующего о грезка по сигналам линейной интерполяции, поступающей из интерполятора 18 на пpивoдiJ 14, 1Хентр рабочей зоны переходит из 03 в 04, точк выхода переходит из точки Д в точку Р, Апертура по сигналам линейной интерпо ляши перемещается из точки F вдоль отрезка FA {см. фиг. 1), являющегося последним аппроксимирующим отрезвим, в точку А, однако, в точке А произойдет встреча . апертуры с границей рабочей зоны, после чего по С11гналу из схемы 29 и триггера ЗО координаты точки А - но вой входной точки - точки переречения аппроксимирующей Прямой с границей рабочей зоны фОтокатода заносятся в соответствующий регистр 32, в интерполятор ii3 и квадратичный функциональный преобразователь 19. После этого диссектор 12 снова будет перёМёйатЕля ёа: счет поворота вокруг точки А. Центр диссектора 04 будет перёмеща-пля пО дуге Окдгж нОСтй радиуса R с центром в точке А в неправленин, определяемом знаком производной ветйиины аппроксимирующего отрезка АF, поступающей из блока 20 дпфференшфования на вход интергдалятора 18. - - ; . - - / . Способ прослеживания линий при считтл вании гра|)ИчвскеА информации и устройс-р во для его осуществления позволяют значятельво повысить скорость считывания 3S графической инфс машга за счет сокраше: ния длины траектории движения диссектора по сравненшо с; длиной отслеживаемой кривой и за счет уменьшения кривизны траектории движения диссектора. Это поэволяет повьюить быстродействие при счйтьтании графической информации без повышений Характеристик эпектроме:санин Ч(еской следящей сйстомь перй гегпения фотоэлектрического пр эбразр&ателя. Враля СЧйтьгоания графической информации по сравнению с известными способами уменьшается в 2-3 раза в зависимости от сложности считываемой графической информашшФормула изобретения 1,Устройство для с итывания графйческой информации, бодержащее фотоэлектркйеский преобразователь, механически связанный с приводами, соединенными с датчиками координат, блок следящей раэвертки, первый и второй выходы которого подключень ко входам фотоэлектрического пре(браЕй5вателя, выход которого соединен с первьпл входом блока следящей рйзвертйи, третий и чеТверть1Й выходы которого подключены к ОДНИМ из входов сумматоров, другие входы которых соединены с выходами датчиков, коорддаат, а выходы с входами буферное регистров, выходке,, которых подкййчены ко входам блока обмена инфорелйиией, отличившее с я тем, что, с целью повышения йлст.рЬдействия, оно содержит интерполятору квадратичный функюгональгадй преобразователь, блок дифферейпированин и блок а№ттроксимации, первый вход которогосоеяи:нен с выходом фотоэпектрнчесйого npeciSразоватепя, второй вход с пятым выходом блока следящей pa fieptXiK, третай я че,1 вертый входа с вЫходЙмш буферныхреи Гйстров, пя1г1Й и uiecJTbiR вХОйы с еьскойвми Датчиков координат, а выхош б уп{)а лЗюшими входами ёлока обмена йнфбрМддней н с снэбТЕ ё стйу1дщимй;вхоДШи SHiseitJоолятора, одни ш которых поДкшс) ко входам квадратичного функцв0нш1ьногр npeo6pa3OBatena, выход которого со4е(дияен с входскм блокв1 диффере ойр&вавна, выход к6 о|юго )ч1эй к другому входу Edoo терполятора, выходы которсяч) соединены соответствешо с управлякящами ,-входами приводов и вторым входом блока спбоящей развертки, 2,Устройство по п. 1, о т л и 4а Ю|ш е е с я тем, что в нем блок .974 аппроксимации содержит коммутатор, регистры координат, управляющий триггер, уэеп сравнения кодов и счетчик, один вход которого соединен с первым входом упомянутого блока, второй вход которого подключен к другому входу счетчика к одним из вхрдов yiэлa сравнения кодов, другие входы которо1ч соединень с выхо дами счетчика, а выход - с входом управлякя егб триггера, выходы ко1 л утатора пойклЬчены ко входам рёггжзтров координат, а вхбды - (x QTBetcT eHHo к выходам уада сравнения кодов, управляющего триг
Д 3 гера, третьему, четвертому, пятому и шестому ъ ояеал блока, выходы которого соединены с выходами узла сравнения кодов, управляющего триггера н регистров координ1ат. Источники информации, принятые во внимание при экспертизе 1,Поляков В. Г, Переверзев-Ордов В. С Эпектроншде систаш сдедйщей развертки, - М. j Энергия 1968., с. 10-30. 2.Авторское свидетельство СССР NO 394821, 06 К 11/00, 1973 (прототип).
Фи2 г
Фиг 3 1 I. II I II -
Фи. 4 i «r.iiit- ULJ
