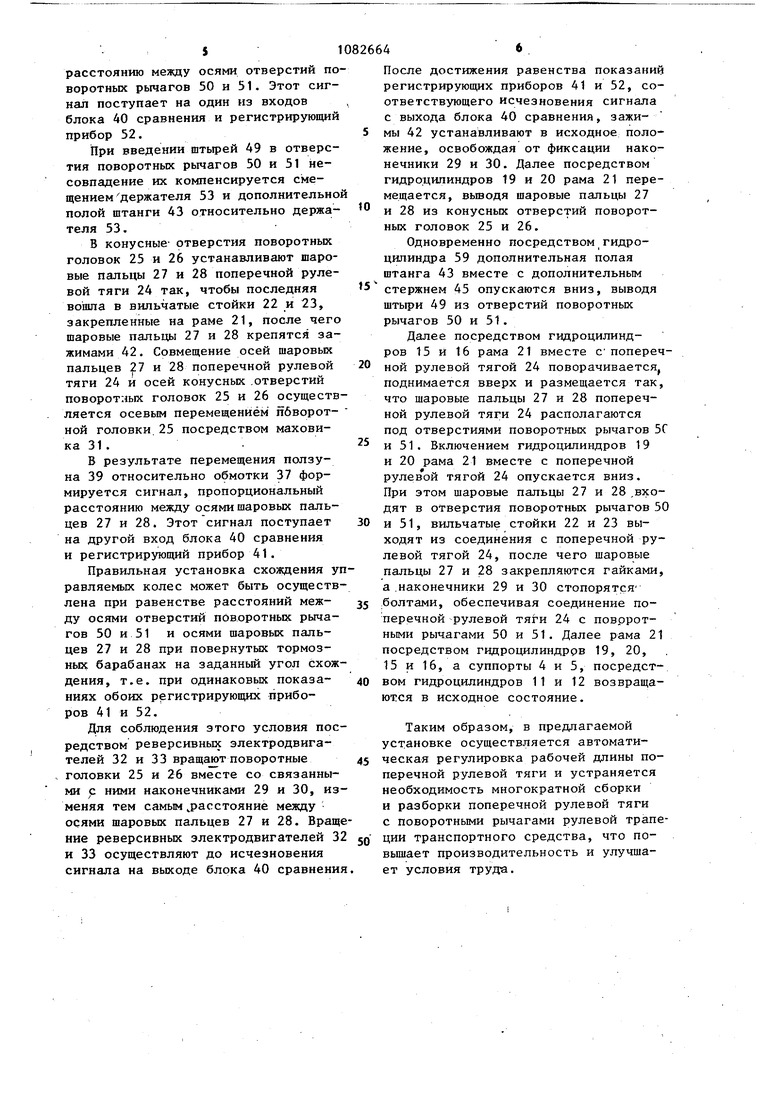
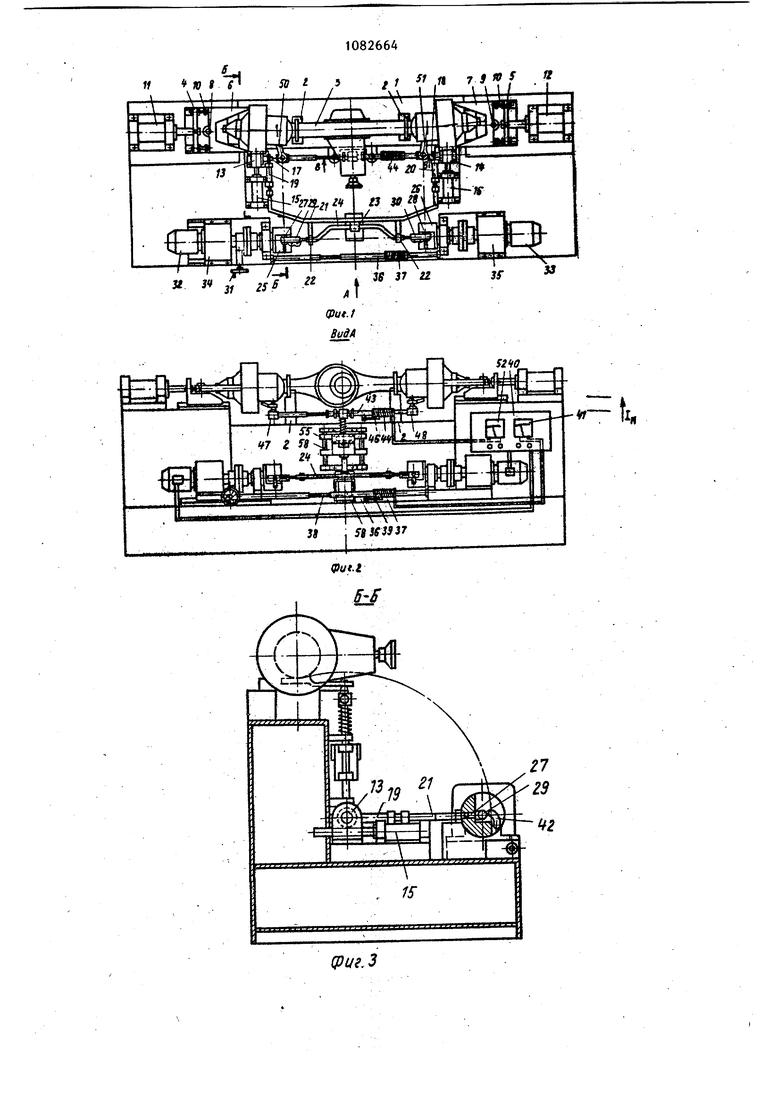
Изобретение относится к транспор ному машиностроению и может быть использовано при регулировке углов установки управляемых колес ведущих мостов на сборочном конвейере. Известна установка для регулиров схождения управляемых колес ведущих мостов транспортных средств, содержащая смонтированные на основании опоры для установки ведущего моста, задатчики угла схождения управляемы колес, датчики перемещений, регистр рующие приборы, подключенные к датчикам перемещений, и блок сравнения входы которого соединены с датчикам перемещений tlj. Недостатком известной установки является необходимость многократного отсоединения поперечной рулевой тяги, отдельной ее регулировки, пов торной сборки и измерения углов схо дения до достижения заданного угла схождения. Кроме того, операции отсоединения и соединения шаровых пал цев поперечной рулевой тяги с новоротными рычагами рулевой трапеции транспортного средства, а также изменение расстояния между шаровыми пальцами поперечной рулевой тяги вьшолняются вручную. Это снижает производительность и ухудшает условия труда при регулировке углов схождения управляемых колес ведущих мостов, имеющих изогнутую поперечную рулевую тягу. Цель изобретения - повышение производительности и улучшение усло вий труда. Поставленная цель достигается тем, что установка для регулировки схождения управляемых колес ведущих мостов транспортных средств, содержащая смонтированные на основании опоры для установки ведущего моста, задатчики угла схождения управляемы колес, датчики перемещений, регистрирующие приборы, подключенные к датчикам перемещений, и блок сравнения, входы которого соединены с датчиками перемещений, снабжена основным приводом вращения, установленным на основании, П -образной рамой с закрепленными на ней вильча тыми стойками для установки на них поперечной рулевой тяги транспортного средства, приводом возвратнопоступательного перемещения, одно звено которого связано с П -образной рамой, а другое кинематически соединено с выходным звеном привода вращения, поворотными головками, соединенными с наконечниками поперечной рулевой тяги, двумя дополнительными приводами вращения, кинематически соединенными с поворотными головками, одна из которых установлена на основании с возможностью осевого перемещения и фиксации в заданном поло7:ении, основной полой штангой, кинематически соединенной с неподвижной частью одного из датчиков перемещений и с одной из поворотных головок, основным стержнем, телескопически связанным с полой штангой, а кинематически - с подвижной частью этого датчика перемещений и с другой поворотной головкой, дополнител.ной полой штангой, кинематически.соединенной с неподвижной частью другого датчика перемещений и снабженной наконечником со штырем для захода в отверстие одного из поворотных рычагов ру- . левой трапеции транспортного средства, дополнительным стержнем, телескопически связанным с дополнительной полой штангой, а кинематически с подвижной частью последнего датчика перемещений и снабженным наконечником со штырем для захода в отверстие другого поворотного рычага рулевой трапеции, и механизмом вертикального перемещения, установленным на основании и соединенным с дополнительной полой штангой, при этом дополнительные приборы вращения связаны с выходом блока сравнения. На фиг. 1 схематично-изображена предлагаемая установка, общий В1ад; на фиг. 2 - вид А на фиг. 1-, на фиг. 3 - разрез Б-Б на фиг. на фиг. 4 - разрез В-В на фиг. 1; на фиг. 5 - разрез Г-Г на фиг. 4. На основании 1 смонтированы опора 2 для установки на них ведущего моста 3 и задатчики углов схождения, содержащие суппорты 4 и 5 с мерными шаблонами 6 и 7, шарнирно установленными на осях 8 и 9 и взаимодействующими с торцами тормозных барабанов ведущего моста. Посредством регулировочных винтов 10 мерные шаблоны 6 и 7 устанавливаются в угловое положение, соответствующее заданному углу схождения управляемых колес. Суппорты 4
и 5 установлены на поперечных напг равЛяющих и соединены с гидроцилиндрами 11 и 12.
На основании 1 установлен привод вращения, содержащий передачи 13 и 14 шестерня - рейка, рейка которьк
соединена с гидроципиндрами 15 и 1бу а шестерня установлена на выходных
валах 17 и 18. На этих выходных валах посредством приводов возвратно-поступательного перемещения, выполненных в виде гидроцилиндров 19 и 20, установлена рама 21 с закрепленными на ней вильчатыми стойками 22 и 23 для установки на них поперечной рулевой тяги 24.
Одно звено привода возвратно-поступательного перемещения (шток гидроцилиндров 19 и 20) соединено с рамой 21, а другое звено (корпус гид-, роцилиндров 19 и 20) жестко соединено с выходными валами 17 и 18.
На основании 1 установлены также поворотные головки 25 и 26, имекщие конусные отверстия для захода в них шаровых пальцев 27 и 28 наконечников 29 и30 поперечной рулевой тяги 24.Поворотная головка 25 установлена с возможностью осевого перемещения и фиксации в заданном положении посредством маховика 31.
Поворотные головки 25 и 26 кинематически соединены с дополнительными приводами вращения, содержащими реверсивные электродвигатели 32 и 33 и редукторы 34 и 35.
С поворотной головкой 26 связана полая щтанга 36, на которой закреплена неподвижная часть (обмотка 37) одного из датчиков перемещений. Стержень 38, жестко соединенный с подвижной частью (ползуном 39) этого датчика перемещений и связанный с поворотлой головкой 25, телескопически соединен с полой штангой 36. Выход этого датчика перемещений, содержащего обмотку 37 и ползун 39, подключен к одному из входов блока 40 сравнения и к регистрирующему прибору 41. Шаровые пальцы 27 и 28 крепятся к поворотнкм головкам 25 и 26 посредством зажимов 42. На дополнительной полой штанге 43 закреплена неподвижная часть (обмотка 44) другого датчика перемещений.
Дополнительный стержень 45, жестко соединенный с подвижной частью (ползуном 46) этого датчика перемещений, телескопически соединен с дополнительной полой штангой 43. На концах дополнительной полой штанги 43 и дополнительного стержня 45 установлены наконечники 47 и 48 со 49 для захода в отверс- ия поворотных рычагов 50 и 51 рулевой трапеции транспортного средства.
Выход датчика перемещений, содержащего обмотку 44 и пЬлзун 46, подключен к регистрирующему прибору 52 и к другому входу блока 40 сравнения, выход которого связан с .реверсивными электродвигателями 32 и 33.
Дополнительная полая штанга 43 соединена с механизмом вертикального перемещения, содержащим держатель 53, установленный на ползуне 54 зафиксированном в пазу каретки 55 пружинами 56 и регулировочньгми винтами 57.
Каретка 55 смонтирована на направляющих 58 и соединена со штоком гидроцилиндра 59 привода вертикального перемещения. На держателе 53 установлены фрикционная шайба 60, втулка 61, в ограничительный паз которой входит штырь 62, запрессованный в ползун 54, и пружина 63. Втулка 61 нанесена на шпонку и имеет возможность осевого перемещения.
На дополнительной полой штанге 43 .установлены фрикционньй фиксатор 64 гайки 65 и пружины 66, регулирующие положение дополнительной полой штанги 43 относительно держателя 53.
Установка работает следующим образом.
На опоры 2 устанавливается ведущий мост 3 без поперечной рулевой тяги 24. Гидроцилиндрами 11 и 12 суппорты 4 и 5 с мерными шаблонами 6 и 7, установленными в заданное угловое положение, подводятся к торцам тормозных барабанов ведущего моста 3. При этом тормозные барабаны устанавливаются в положение, соответствующее заданному схождению управляемых колес. Включением гид-роцилиндра 59 каретка 55 вместе с дополнительной полой штангой 43 и дополнительным стержнем 45 поднимается вверх. При этом щтыри 49 наконечников 47 и 48 направляют в отверстия поворотных рычагов 50 и 5
В результате перемещения ползуна 46 относительно обмотки 44 формируется сигнал, пропорциональный $ расстоянию между осями отверстий по воротных рычагов 50 и 51. Этот сигнал поступает на один из входов блока 40 сравнения и регистрирующий прибор 52. При введении штьфей 49 в отверстия поворотных рычагов 50 и 51 несовпадение их компенсируется смещением держателя 53 и дополнительно полой штанги 43 относительно держателя 53. В конусные- отверстия поворотных головок 25 и 26 устанавливают шаровые пальцы 27 и 28 поперечной рулевой тяги 24 так, чтобы последняя вошла в вильчатые стойки 22 и 23, закрепленные на раме 21, после чего шаровые пальцы 27 и 28 крепятся зажимами 42. Совмещение осей шаровых пальцев 27 и 28 поперечной рулевой тяги 24 и осей конусных .отверстий поворотных головок 25 и 26 осуществ ляется осевым перемещением пбворотной головки 25 посредством маховика 31 . В результате перемещения ползуна 39 относительно обмотки 37 формируется сигнал, пропорциональный расстоянию между осями шаровых пальцев 27 и 28. Этот сигнал поступает на другой вход блока 40 сравнения и регистрирующий прибор 41. Правильная установка схождения у равляемых колес может быть осуществ лена при равенстве расстояний между осями отверстий пйворотных рычагов 50 и 51 и осями шаровых пальцев 27 и 28 при повернутых тормозных барабанах на заданный угол схож дения, т.е. при одинаковых показаниях обоих регистрирующих приборов 41 и 52. Для соблюдения зтого условия пос редством реверсивных электродвигателей 32 и 33 вращают поворотные головки 25 и 26 вместе со связанными ними наконечниками 29 и 30, из меняя тем самым расстояние между осями шаровых пальцев 27 и 28. Вращ ние реверсивных электродвигателей 3 и 33 осуществляют до исчезновения сигнала на выходе блока 40 сравнени 4 После достижения равенства показаний регистрирующих приборов 41 и 52, соответствующего исчезновения сигнала с выхода блока 40 сравнения, зажимы 42 устанавливают в исходное положение, освобождая от фиксации наконечники 29 и 30. Далее посредством гидродипиндров 19 и 20 рама 21 перемещается, вьшодя шаровые пальцы 27 и 28 из конусных отверстий поворотных головок 25 и 26. Одновременно посредством гидроцилиндра 59 дополнительная полая штанга 43 вместе с дополнительным стержнем 45 опускаются вниз, выводя штьфи 49 из отверстий поворотных рычагов 50 и 51. Далее посредством гидроцилиндров 15 и 16 рама 21 вместе споперечной рулевой тягой 24 поворачивается поднимается вверх и размещается так, что шаровые пальцы 27 и 28 поперечной рулевой тяги 24 располагаются под отверстиями поворотных рычагов 5f и 51. Включением гидроцилиндров 19 и 20 рама 21 вместе с поперечной рулевой тягой 24 опускается вниз. При этом шаровые пальцы 27 и 28 .входят в отверстия поворотных рычагов 50 и 51, вильчатые стойки 22 и 23 выходят из соединения с поперечной рулевой тягой 24, после чего шаровые пальцы 27 и 28 закрепляются гайками, а .наконечники 29 и 30 стопорятся болтами, обеспечивая соединение поперечной рулевой тяги 24 с поврротными рычагами 50 и 51. Далее рама 21 посредством гидроцилиндров 19, 20, 15 и 16, а суппорты 4 и 5, посредством гидроцилиндров 11 и 12 возвращаются в исходное состояние. Таким образом, в предлагаемой установке осуществляется автоматическая регулировка рабочей длины поперечной рулевой тяги и устраняется необходимость многократной сборки и разборки поперечной рулевой тяги с поворотными рычагами рулевой трапеции транспортного средства, что повышает производительность и улучшает условия труда.
У
so t 5
/ /
/-Й
j/ /f - ,f
.1 ВидА I Jl
7
/ (.« ..ff
3S 37 гг
jf , f8 3633 37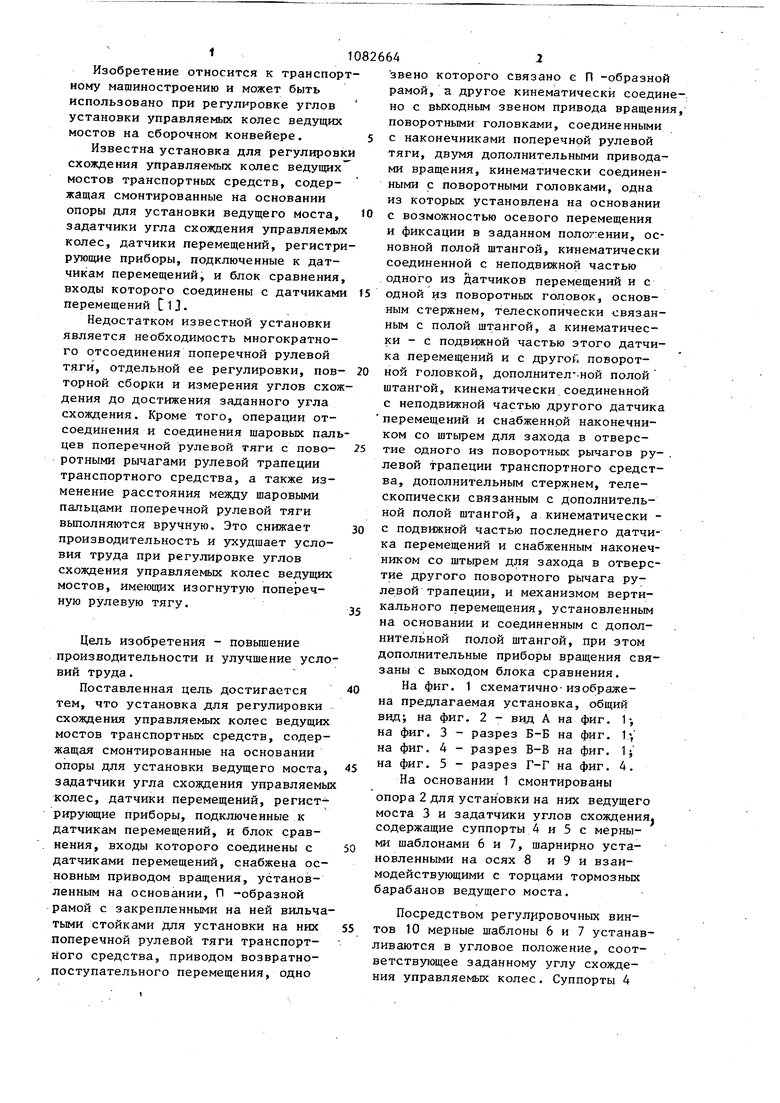


УСТАНОВКА ДЛЯ РЕГУЛИРОВКИ СХОЖДЕНИЯ УПРАВЛЯЕМЫХ КОЛЕС ВЕДУЩИХ МОСТОВ ТРАНСПОРТНЫХ СРЕДСТВ, содержащая смонтированные на основании опоры для установки ведущего моста, задатчики угла схождения управляемых колес, датчики перемещений, регистрирующие приборы, подключенные к датчикам перемещений, и блок сравнения, входы которого соединены с дат.чиками перемещений, отличающаяся тем, что,с целью повышения производительности и улучшения условий труда, она снабжена основным приводом вращения, установлен.ным на основании, П -образной рамой с закрепленными на ней вильчатыми стойками для установки на них поперечной рулевой тяги транспортного средства, приводом возвратно-поступательного перемещения, одно звено которого связано с П -образной рамой, а другое кинематически соединено : с выходным звеном привода вращения, ; поворотными головками, соединенными с наконечниками поперечной руле- вой тяги, двумя дополнительными приводами вращения, кинематически соединенными с поворотными головками, одна из которых установлена на основании с возможностью осевого перемещения и фиксации в заданном положении основной полой штангой, кинематически соединенной с неподвижной частью одного из датчиков перемещений и с одной из прворотных голоиок, основным стержнем, телескопически связанным с полой штангой, а кинематически - с подвижной частью этого датчика перемещений и с другой поворотной голов кой, дополнительной полой штангой, кинематически соединенной с непод- (Л .. вижной частью другого датчика перемещений и снабженной наконечником со штырем для захода в отверстие одного из поворотных рычагов рулевой трапеции, транспортного средства, дополнительным стержнем, теле- о ас ю . скопнчески связанным с дополнительной полой штангой, а кинематически с подвижной частью последнего дата чика перемещений и снабженным накоО5 нечником со штырем для захода в 4 отверстие другого поворотного рычага рулевой трапеции, и механизмом вертикального перемещения, установленным на основании и соединенным с дополнительной полой штангой, при этом дополнительные приводы вращения связаны с выходом блока сравнения .
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США № 3977067, | |||
| кл | |||
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
