Изобретение относится к геофизическим скважинным приборам для измерения параметров искривления скважин.
Известен инклинометр, обеспечиваю щий возможность измерения азимутальных и зенитных углов как в наклонно направленных, так и в условно вертикальных стволах буровых скважин l .
Известен инклинометр, сс держащий
.датчик азимута, горизонтируемый посредством внутренней рамки и внешней рамки-маятника карданового подвеса, преобразователи углов, кинематически связанные с размещенными на рамке-маятнике тремя маятниками, два из которых имеют разную длину и параллельные оси вращения, а третий маятник с осью вращения, перпендикулярной осям вращения первых двух, имеет длину, равную длине большего маятника 2 .
В известном инклинометре точность измерения параметров искривления скважин при малых зенитных углах (менее 5) повышена в результате увеличения чувствительности размещенных во взаимно перпендикулярных плоскостях преобразователей углрв путем увеличения длины кинематически связанных с ними маятников; Это привело к значительнои у увеличению осевого габарита рамки-маятника, а следовательно, к увеличению ее веса, повышению момента трения в ее опорах и более интенсивному износу последних. При этом дальнейшее повышение чувствительности и точности измерени инклинометра в случае ограниченного диаметра рамки-маятника может быть осуществлено лишь путем повышения разрешгиощей способности упомянутых преобразователей. Однако повышение разрешгиощей способности преобразователей сверх уровня, достигнутого в условиях серийного производства, приводит к низкому качеству конструк ций и чрезмерно высокой их стоимости 5то.относится прежде всего к наиболее простым по конструкции и широко применяемым в инклинометрах реостатным преобразователям, повышение разрешающей сопосбности которых достигается уменьшением диаметра провода обмотки. При этом, помимо ужесточения требований к изготовлению и увеличения трудоемкости, происходит снижение перегрузочной способности и износоустойчивости преобразователей, что приводит к уменьшению надежности работ ы инклиномера, особенно в усд7овиях повышенных температур, имеющих место в сверхглубоких скважинах.
Цель изобретения - уменьшение осевого габарита, повьашение чувствительности и точности измерения.
. Поставленная цель достигается тем, что кинематическая связь между преобразователями углов и большими маятниками выполнена в виде двух дополнительно введенных маятников с ведомыми звеньями, причем длина дополнительных маятников равна длине меньшего маятника, а оси вращения их параллельны осям вращения больших маятников, при этом последние выполнены в виде рычагов с передаточными звеньями, которые установлены встречно и с возможностью взаимодействия с ведомыми звеньями дополнительных маятников. .
Кроме того, с целью упрощения Конструкции и повышения надежности работы в условиях сверхглубоких скважин дополнительные маятники выполнены в виде неуравновешенных тел.
Причем передаточные и ведомые звенья выполнены в виде поводков
Для осуществления возможности контроля отработки дополнительными маятниками углов отклонения, задаваемых рычагами, поводки выполнены в виде электрических контактов.
Причем с целью упрощения конструкции электрические контакты подключены к преобразователям углов дополнительных маятников.
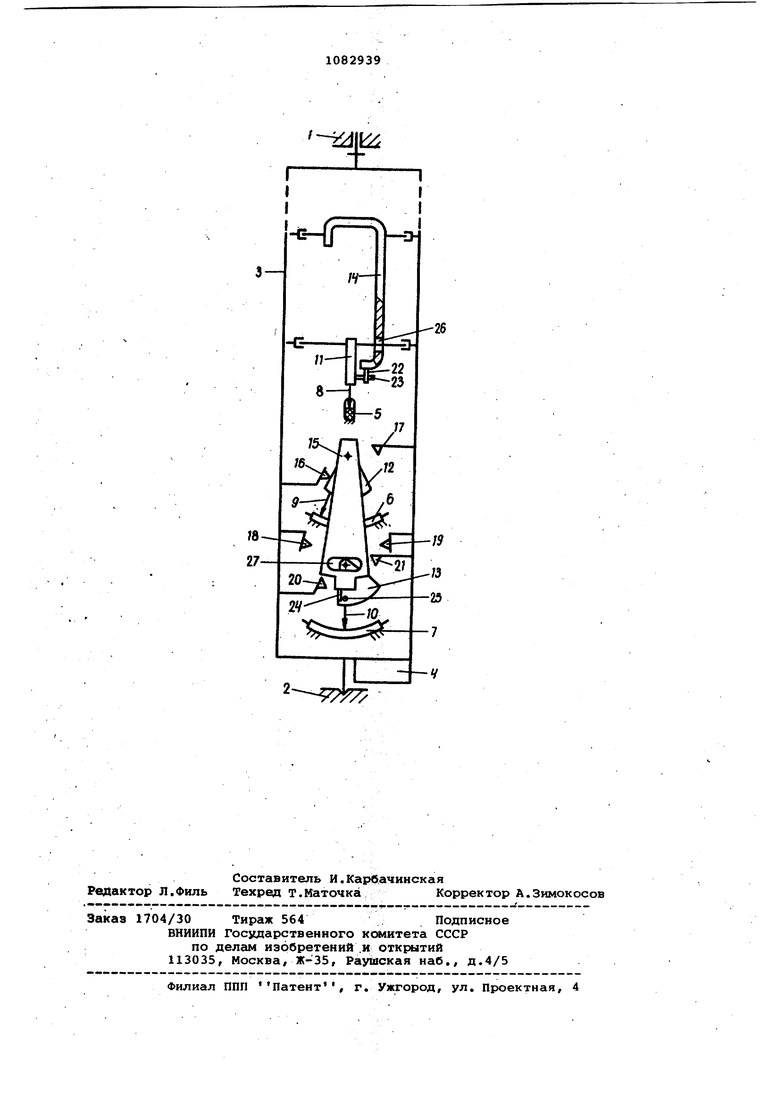
На чертеже представлена схема инклинометра (наиболее простой вариант выполнения) .
Инклинометр содержит свободно вращающуюся в опорах 1 и 2 корпуса рамку-маятник 3 с эксцентрично закрепленным грузом 4. При этом рамкамаятник 3 является внешней рамкой карданового подвеса. Внутренняя рамка карданового подвеса и горизонтируемый с помощью обеих рамок датчик азимута размещены в верхней части рамки-маятника 3 (не показаны). Ниже датчика азимута во взаимно перпендикулярных плоскЬстях чувствительности одна из которых совпадает с плоскостью ориентации рамки-маятника 3, расположены два датчика углОв. Нижни датчик угла является двухсекционным и рассчитан на измерение углов с разной точностью в двух диапазонах, например 0-5 и 5-50° . Верхний датчик угла предназначен для измерения углО| -в диапазоне 0-5. Оба датчика содерг жат одинаковые по конструкций и размерам реостатные преобразователи, включающие в себя реохорды S, б и 7 и взаимодействующие с ними щетки 8,9 и 10; маятники 11 - 13 малой длины, жестко связанные с щетками;маятники 14 и 15 большой длины,выполненные в виде рычагов,взаимодействующих с . маятниками 11 и 13.При этом основной маятник 12 малой длины уменьшения осевого габарита рамки-маятника 3 подвешен соосно с маятником 15 большой
длины,а оси вра1цения дополнительных маятников 11 и 13 малой длины разме-гщены паргшлельно осям маятников 14 и 15 большой длины.Причем каждый из указанных маятников для ограничения их углового перемещения и предохранения щеток 8,9 и 10 от повреждений снабжен упорами,жестко связанньши с рамкой-маятником З.Для осуществления возможности последовательного реагирования на возрастание зенитного маятников 15 и 12 последний соединен с щеткой 9, смещенной относительно центра его тяжести в сторону, противоположную размещению груза 4. При этом маятник 12 благодаря наличию .15 упоров 16 и 17 имеет возможность углового перемещения в диапазоне . . 0-50. Маятники 14 и 15 имеют возможность отклонения от вертикали в обе стороны до соприкосно- 20 вения со своими идентично установленными упорами (показаны упоры 18 и 19 для маятника 15). Маятники 11 и 13 с помощью своих идентично установленных упоров (показаны уп.Ьры 25 20 и 21 для маятника 13) ограничены во вращении на максимально возможный для реостатнь)х преобразователей угол равный 50. Причем реохорды 5 / реостатных преобразователей установ- лены так, что при совмещении оси ; рамки-маятника 3 и центров тяжести маятников 14 и 15 с вертикалью, щетки 8 и 10 делят их пополам и имеют возможность отклонения от вертикали в обе стороны на угол равный 25. При .этом щетки 8 и 10, жестко связанные с маятниками 11 и 13, взаимодействуют с маятниками 14.и 15 посредством постоянно введенных в соприкосновение рабочих поверхностей последних. Для 40 упрощения конструкции и повышения надежности работы ее в условиях высоких температур и давлений путем исключения устройств для выборки мертвого хода, например, основанных на 45 использовании маломоментных спиральных пружин (обычно применяемых при использовании кулисных или зубчатых передач), а также уменьшения трения взаимно соприкасающихся рабочих по-. 50 верхностей маятники 11 и 13 выполнены в виде неуравновешенных тел, самЬ-г произвольно входящих в одностороннее , соприкосновение с маятниками 14 и 15 посредством жестко закрепленных на 55 каждом из них кинематических звеньев, выполненных в виде поводков 22-25, имеющих, например, форму ; цилиндров. Причем для осуществления возможнсэсти контроля отработки маят- 60 никами 11 и 13 углов поворота, задаваемых маятниками 14 и 15, поводки могут быть выполнены в виде электрических контактов, размыкание которых будет свидетельствовать о рас- 5
согласовании задаваемых и отрабатываемых углов, например, по причине засорения опор маятников 11 и 13. Кроме того, для упрощения конструкции, например, путем устранения необходимости использования дополнительных каналов связи указанные контакты могут быть подключены через щетки 8 и 10 к соответствующим преобразователям углов,что позволит по разрыву образованной таким образом электрической измерительной цепи судить о налии неисправности., и.нклинометра. Для исключения влияйИя маятников 11 и 13 на истинные значения определяемых с помощью маятников 14 и 15 угловых величин масса последних должна быть как можно больше массы первых, однако не должна при этом достигать значений, превышающих допустимые нагрузки в опорах маятников 14 и 15. Варьируя формой и размерами маятников, требуемое соотношение масс нетрудно получить даже в случае использования .одинаковых по удельному весу материалов. Для обеспечени постоянного контакта: в точках соприкосновения соответствующие пар поводков 22 и 23, 24 и 25 при любых отклонениях рамки-маятника 3 от вертикали в заданном поддиапазоне малых зенитных углов (0- центры тяжести маятников 11 и 13 при положениях, показанных на чертеже, должны лежать в плоскостях, проведенных через оси вращения этих мау тников и отклоненных в сторону простирания их тел от оси рамки на угол, не меньший угла Л, который может быть рассчитан по формуле
c.-o. -9,
e cose-c
где 0 - максимальный зенитный угол, который может быть определен с помощью взаимно перпендикулярных преобразователей (для рассматриваемого случая v р ); niin- расстояние от осей вращения
маятников 14 и 15 до соответствующих им осей поводков 23 и 25 при максимальном зенитном углей;
с - расстояние между осями вращения соответствующих пар маятников 14-11 и 15-13. Для обеспечения возможности свободного уголового перемещения маятников 14 и 15 в Зсщанном для них диапазоне они снабжены окнами 26 и 27, охватывающими оси вращения соответствующих маятников 11 и 13.
Инклинометр работает следующим образом.
При отклонениях инклинометра на малый зениуный угол (до 5), при
котором момент, вращающий внешнюю рамку-маятник .3, недостаточен для установления ппоскости ее ориент4ции в плоскости искривления скважина, измерение параметров искривления последней осуществляют с помощью датчика азимута и взаимно перпендикулярных преобразователей углов, включающих реохорды 5,7 и щетки 8,10, взаимодействующие с соответствующими маятниковыми системами 14-11 и 15-13 В этом случае маятники 14 и 15 благодаря своей большей массе при угловом перемещении в направлениях воздействий пододкрв 22 и 24 на поводки 23 и 25 перемещают с помощью последних соответствующие маятники 11 и 13. При угловом перемещении маятников 14 и 15 )В противоположные сторон{л поводки 23 и 25 самопроизвольно. следуЦ ют за соответствующими поводками 22 и 24, находясь в постоянном с ними соприкосновении, благодаря смещенным центрам тяжести маятников 11 и 13, в результате чего последние имеют возможность углового перемещения в зависимости от положения маятников 14 и 15, Таким образом, обеспечивается передача углового перемещения от маятников 14 и 15 к маятниками Ли 13, При этом обе рассматриваемые маятниковые системы реализуют опре.деленную зависимость между углами отклонения больших и малых по длине соприкасающихся маятников. Эта зависимость А i ( Sfz ) J имеет вид
8 COS 012-С
Ьагссоз
,
де fl - угол отклонения маятника И
или 13; 40
(2 отклонения маятника 14
или 15;
b - расстояние от осей вращения маятников 11 и 13 до осей поводков 23 и 25;.
- расстояние от осей вращения маятников 1-4 и 15 до соответствующих им осей поводков 23 и 25 при угле б 2.
При определенных значениях величин Ь, с и I указанная зависимость при малых зенитных углах имеет линейный характер. Причем, варьируя значениями упомянутых величин, можно добиться того, чтобы для рассматриваемого примера на каждый 1 изменения угла 0 2 Риращение угла/ составляло 5 с точностью до несколькихугловых минут. При этом передаточное отношение маятниковых систем будет .
Предлагаемый инклинометр по сравнению с известным при измерении малы зенитных углов обладает более высокой чувствительностью определяемой прелоде всего величиной передаточного отношения, которое в зависимости от конструктивного исполнения преобразрвателей углов, маятниковых систем, а также местоположения передаточных и ведомых звеньев, формы и размеров их соприкасающихся поверхностей может иметь значения. Это позволяет обеспечить получение электрических выходных сигналов, пропорциональных составляющим зенитного угла во взаимно перпендикулярных плоскостях, при более высоком значении отношения сигнал/шум, а следовательно, осуществить измерение параметров искривления скважин с более высокой точностью. Причем достижение этого эффекта может происходить при одновременном уменьшении осевого габарита рамки-маятника 3.
При больших зенитных углах (более Б), когда плоскость ориентации рамки-маятника 3 совпадает с плоскостью искривления скважины, в действие включается маятник 12, и работа рред /лагаемого инклинометра аналогична работе известной конструкции.
Использование изобретения позволит повысить точность измерения параметров искривления сверхглубоких скважин, а также упростить изготовление и повысить надежность инклинометров,
/-
-i2l|t
dp
| название | год | авторы | номер документа |
|---|---|---|---|
| Инклинометр | 1983 |
|
SU1134705A1 |
| Инклинометр | 1978 |
|
SU798279A1 |
| Устройство для измерения зенитного угла искривления скважины | 2018 |
|
RU2692365C1 |
| Инклинометр | 1984 |
|
SU1469108A1 |
| Инклинометр | 1991 |
|
SU1800014A1 |
| Устройство для измерения азимута скважины | 1976 |
|
SU709805A1 |
| Инклинометр | 1984 |
|
SU1194995A1 |
| Инклинометр | 1976 |
|
SU868056A1 |
| Инклинометр | 1975 |
|
SU636380A1 |
| Устройство для измерения магнитного азимута оси скважины | 1982 |
|
SU1127973A1 |
1. ИНКЛИНОМЕТР, содержащий датчик азимута, соединенный с внутренней рамкой -и внешней рамкой-маятником карданового подвеса, преобразователи углов, кинематически связанные с размещенными на рамке-маятнике тремя маятниками, два из которых. имеют разную длину и параллельны оси вращения, а третий маятник с осью вращения, перпендикулярной осям вращения первых двух, имеет длин, равную длине большего маятника,о т личающийся тем, что, с целью уменьшения осевого габарита, йовышения чувствительности, точности измерения, кинематическая связь между преобразователями углов и большими маятниками выполнена в виде, двух дополнительно введенных маятниwtc : . 1J 13 , §ЯУГМ«МКМ ков с ведомыми звеньями, причем длина дополнительных маятников равна длине меньшего маятника, а.оси вращения их параллельны осям вращения больших маятников, при этом последние выполнены в виде рычагов, с передаточными звеньями которые установлены встречно и с возможностью взаимодействия с ведомыми звеньями дополнительных маятников. 2.Инклинометр по п. 1, о т л ичающийся тем, что, с целью упрощения конструкции и повышения надежности работы в условиях сверхглубоких скважин, дополнительные маятники выполнены в виде неуравноi. (Л вешенных тел, 3.Инклинометр по п. 2 , отличающийся тем, что передаточные и ведомые звенья выполнены в виде поводков. 4.Инклинометр по п. 3, отличающийся тем, что, с целью осуществления возможности контроля отработки дополнительными маятникам.и углов отклонения, задаваемых рычагами, поводки выполнены в виде электри ческих контактов. 5.Инклинометр по п. 4, о т л ичающийся тем, что, с целью упрощения конструкции электрические контакты подключены к преобразователям углов дополнительных маятни..ков.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Инклинометр | 1978 |
|
SU798279A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
