Изобретение относится к нефтегазовой промышленности, в частности, к устройствам для измерения зенитного угла искривления скважины.
Известно устройство скважинного прибора инклинометра КИТ-М, содержащее корпус рамки-маятника, коллектор, дебаланс, подпятник опоры вращения, корпус с круговым реохордом, плату, с дуговым реохордом, магнитомеханический чувствительный элемент, отвес и подпружиненный арретир (см. кн. Малюга А.Г. Инклинометры для исследования глубоких и сверхглубоких скважин. - Тверь: НТП «Фактор», 2002. - см с. 146). Недостатком указанного устройства является отсутствие возможности непрерывного контроля параметров искривления скважины непосредственно в процессе бурения.
Известно устройство, содержащее рамку-маятник, установленную на опорах, дебаланс, маятники датчика угла, закрепленные на осях, коллектор. Недостатком указанного устройства является низкая надежность за счет большого числа подвижных механических частей и контактов, а также отсутствие возможностей непрерывного контроля пространственного положения ствола скважины непосредственно в процессе бурения по беспроводному каналу связи забоя с устьем скважины (А.С. СССР №63680, 1978 г.)
Наиболее близким по технической сути к предложенному устройству является устройство, содержащее корпус, рамку-маятник с эксцентричным грузом, установленную в корпусе, расположенные соосно маятниковый датчик больших углов и маятниковый датчик малых углов, два реостатных преобразователя взаимодействующих в неподвижными упорами, оси качания которых перпендикулярны оси вращения рамки-маятника. Недостатком устройства является низкая надежность из-за наличия в системе съема сигнала с реостатных преобразователей контактных щеток, а также отсутствие возможности измерения зенитного угла искривления скважины непосредственно в процессе бурения по беспроводному каналу связи забоя с устьем скважины (А.С. SU 1134705 А, бюл. №2, 1985 г.).
Техническая задача - создание устройства для измерения зенитного угла искривления ствола скважины во всем диапазоне искривления непосредственно в процессе бурения и передачи сигнала по беспроводному электрическому каналу связи забоя с устьем скважины.
Технический результат - повышение надежности и точности устройства при измерении зенитных углов во всем диапазоне искривления ствола скважины непосредственно в процессе бурения и передачи сигнала по беспроводному каналу связи забоя с устьем скважины путем усовершенствования конструкции.
Он достигается тем, что в известном устройстве, содержащем корпус, рамку-маятник с эксцентричным грузом, в которой расположены маятниковый датчик больших углов и блок маятниковых датчиков малых углов, включающий два реостатных преобразователя, взаимодействующих с заключенными между неподвижными упорами маятниками большой длины, оси качания которых перпендикулярны оси вращения рамки-маятника, в рамке-маятнике установлен дополнительно источник питания- аккумулятор, преобразователь датчика больших углов выполнен в виде полевого датчика Холла, жестко закрепленного в рамке-маятнике взаимодействующего с магнитным полем постоянного магнита, жестко закрепленного на свободном конце маятника датчика больших углов, холловские электроды полевого датчика Холла соединены со входом жестко закрепленных в рамке-маятнике, аналого-цифрового преобразователя, выход которого соединен со входом преобразователя кода в частоту импульсов, а его выход соединен со входом делителя импульсов, выход которого через коллектор соединен с каналом связи, преобразователь датчика малых углов также выполнен в виде дополнительного датчика Холла, при этом его маятник снабжен дополнительным постоянным магнитом, жестко закрепленным на его свободном конце и его магнитное поле воздействует на дополнительный полевой датчик Холла жестко закрепленный в рамке-маятнике, холловские электроды которого соединены параллельно с холловскими электродами основного полевого датчика Холла, при этом длина маятника датчика малых углов в два раза больше длины маятника датчика больших углов, а датчики Холла установлены возле упоров.
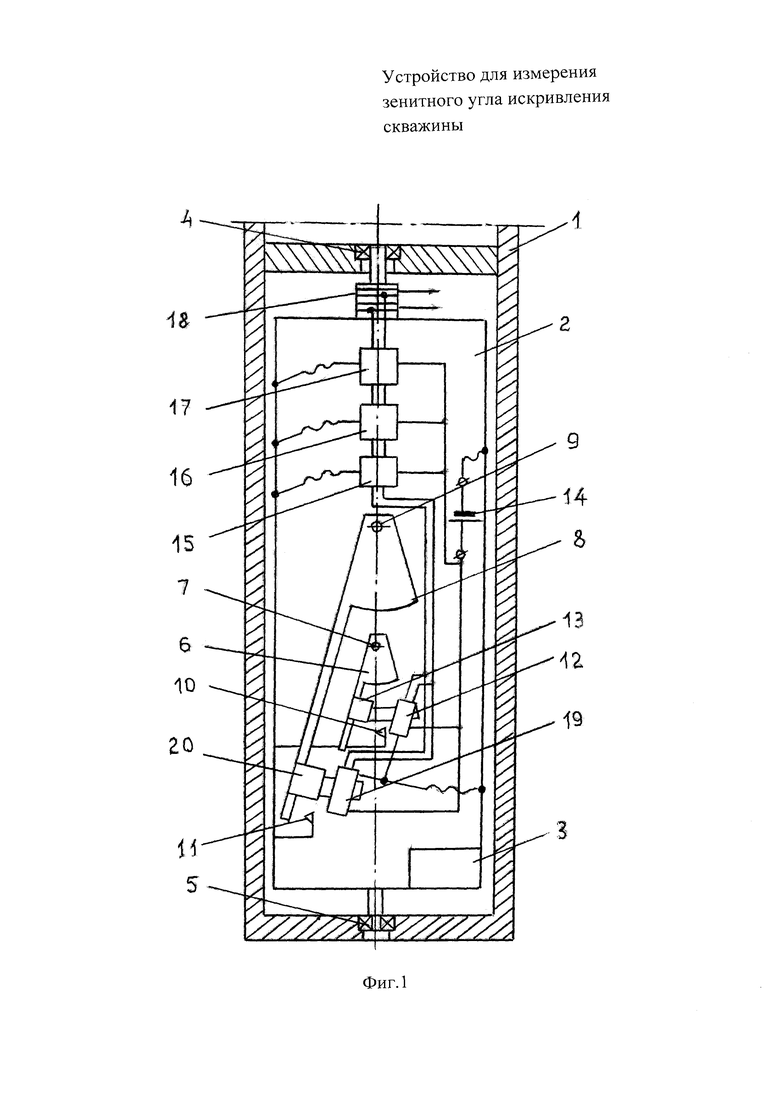
На чертеже (фиг. 1 - вид в разрезе) изображено устройство для измерения зенитного угла искривления скважины.
Устройство содержит корпус 1, рамку-маятник 2 с эксцентричным грузом 3, установленную на подшипниках 4,5 в корпусе, расположенные в ней соосно маятниковый датчик больших углов 6 на оси 7 и маятниковый датчик малых углов 8 на оси 9, включающие преобразователи, взаимодействующие с неподвижными упорами 10,11, оси качания которых перпендикулярны оси вращения рамки-маятника, преобразователь датчика больших углов 6 выполнен в виде полевого датчика Холла 12, жестко закрепленного в рамке-маятнике 2 взаимодействующего с магнитным полем постоянного магнита 13, жестко закрепленного на свободном конце маятника датчика больших углов, источник питания - аккумулятор 14, установленный в рамке-маятнике, холловские электроды полевого датчика Холла 12 соединены со входом жестко закрепленных в рамке-маятнике, аналого-цифрового преобразователя 15, выход которого соединен со входом преобразователя кода в частоту импульсов 16, а его выход соединен со входом делителя импульсов 17, выход которого через коллектор 18 соединен с каналом связи, преобразователь датчика малых углов 8 также выполнен в виде дополнительного датчика Холла 19, при этом его маятник снабжен дополнительным постоянным магнитом 20, жестко закрепленным на его свободном конце и его магнитное поле воздействует на дополнительный полевой датчик Холла 19 жестко закрепленный в рамке-маятнике 2, холловские электроды которого соединены параллельно с холловскими электродами основного полевого датчика Холла 12, при этом длина маятника датчика малых углов 8 в два раза больше длины маятника датчика больших углов 6, а датчики Холла установлены возле упоров 10, 11.
Устройство работает следующим образом. В момент измерения рамка-маятник 2 под действием эксцентричного груза 3 вращается в подшипниках 4,5 и устанавливается в плоскости искривления ствола скважины под действием эксцентричного груза 3, маятник датчика больших углов 6 с жестко закрепленным на нем постоянным магнитом 13 и маятник датчика малых углов 8, закрепленный на оси 9 с закрепленным на нем постоянным магнитом 20 под действием силы гравитации поворачиваются на осях 7, 9 и меняют свое положение относительно датчиков Холла 13 и 19, жестко закрепленных в рамке-маятнике 2, что приводит к изменению напряженности магнитных полей, действующих на датчики Холла 13, 19, причем при малых углах искривления ствола скважины перемещение дополнительного постоянного магнита 20, жестко закрепленного на маятнике 8 относительно дополнительного датчика Холла 20, жестко закрепленного в рамке-маятнике 2, значительно больше, чем перемещение постоянного магнита 13, жестко закрепленного на маятнике 6 относительно датчика Холла 12, жестко закрепленного в рамке-маятнике 2. В результате на холловских электродах появляется ЭДС. На датчике Холла 19 ЭДС значительно больше чем ЭДС на холловских электродах датчика Холла 12, так как перемещение постоянного магнита 20 относительно датчика Холла 19 больше и, следовательно, магнитное поле, действующее на датчик Холла 12 ничтожно. Эта ЭДС поступает на аналого-цифровой преобразователь 15 и далее через преобразователь кода в частоту 16 и делитель частоты 17 посредством коллектора 18 подается в канал связи. При больших углах искривления скважины маятник дополнительного датчика малых углов 8, с жестко закрепленным на нем дополнительным постоянным магнитом 2 упирается в упор 11 и не перемещается. Маятник датчика больших углов перемещается относительно датчика Холла 12 и на холловских электродах его появляется ЭДС, пропорциональная большим углам искривления скважины. Эта ЭДС поступает на вход аналого-цифрового преобразователя 15, где преобразуется в параллельный двоичный код, который посредством преобразователя кода в частоту импульсов 16 трансформируется в последовательность импульсов пропорциональных зенитному углу и поступает на делитель частоты 17, где преобразуется в последовательность серии импульсов инфранизкой частоты, соответствующей полосе пропускания беспроводного электрического канала связи забоя с устьем скважины, с выхода делителя частоты 17, эта серия импульсов с коллектора 18 подается в канал связи. Источник питания-аккумулятор 14, установленный в рамке-маятнике 2 подключен к полевым датчикам Холла 12,19 и аналого-цифровому преобразователю 15, преобразователю кода в частоту 16 и делителю частоты 17, установленным в рамке0маятнике 2.
Устройство имеет высокую надежность за счет исключения контактных щеток и повышенную точность за счет повышения чувствительности при измерении малых углов искривления скважины путем увеличения перемещения дополнительно введенных удлиненного маятника, с закрепленным на нем дополнительным постоянным магнитом и дополнительного датчика Холла, изготовленного по технологии кремний на изоляторе (КНИ), температурный диапазон которого расширен до 300°С. Полевой датчик Холла (ПДХ), изготовленный по технологии кремний на изоляторе (КНИ), имеет чувствительность превышающую чувствительность обычных датчиков в 10 раз (см. ст. Мордкович В.Н. Структуры «Кремний на изоляторе» - Новый материал микроэлектроники // Материалы электронной техники. 1998. №2; Мокрушин А.Д., Омельяновская Н.М., Леонов А.В., Мордкович В.Н., Пажин Д.М. Радиационные эффекты в КНИ магнито-чувствительных элементах при различных условиях облучения, ВАНТ. Вып. 1-2, М., 2001.). Точность предлагаемого устройства выше прототипа. ПДХ (Полевой Датчик Холла) изготавливается на основе структур КНИ, в которых рабочий слой кремния отделен от подложки встроенным диэлектрическим слоем. В отличие от обычных датчиков Холла ПДХ представляет собой сочетание резистора Холла с вертикальным двухзатворным полевым транзистором типа металл-диэлектрик-полупроводник. В результате повышаются характеристики датчика Холла такие как, удельная магнитная чувствительность, диапазон рабочих температур, отношение сигнал/шум, энергопотребление, пороговая магнитная чувствительность.
Известно, что зависимость выходного сигнала от датчика Холла напряженности внешнего магнитного поля, созданная постоянным магнитом линейная, следовательно, и статическая характеристика предлагаемого устройство для измерения зенитного угла искривления скважин, построенное на основе ПДХ также линейная и в связи с этим устройство обладает повышенной точностью.
Используемые в устройстве аналого-цифровой преобразователь, преобразователь кода в частоту импульсов и делитель частоты также выполнены по КНИ технологии и сохраняют работоспособность до 300÷400°С (см. ст. Мокрушин А.Д., Омельяновская Н.М., Леонов А.В., Мордкович В.Н., Пажин Д.М. Радиационные эффекты в КНИ магнито-чувствительных элементах при различных условиях облучения, ВАНТ. Вып. 1-2, М., 2001, с. 36-42). Это соответствует температуре на забое сверхглубоких скважин.
Предложенное устройство отличается высокой надежностью и точностью за счет повышения чувствительности при измерении малых углов искривления скважин, и также возможностью контроля зенитного угла искривления скважины в процессе бурения по беспроводному электрическому каналу связи забоя с устьем скважины.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения зенитного угла искривления скважины | 2016 |
|
RU2649187C2 |
| Устройство для измерения температуры в скважине | 2019 |
|
RU2713842C1 |
| Инклинометр | 1982 |
|
SU1082939A1 |
| Инклинометр | 1983 |
|
SU1134705A1 |
| Инклинометр | 1978 |
|
SU798279A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ ИСКРИВЛЕНИЯ СКВАЖИНЫ И ПОЛОЖЕНИЯ ОТКЛОНИТЕЛЯ ПРИ БУРЕНИИ | 2001 |
|
RU2184845C1 |
| Инклинометр | 1984 |
|
SU1469108A1 |
| Устройство для измерения искривления скважины | 1979 |
|
SU866149A1 |
| Преобразователь зенитного угла | 1987 |
|
SU1435769A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ТЕМПЕРАТУРЫ В СКВАЖИНЕ | 2021 |
|
RU2772616C1 |
Изобретение относится к нефтегазовой промышленности, в частности к устройствам для измерения зенитного угла искривления скважины. Технический результат - повышение точности измерения при малых значениях зенитных углов искривления скважины непосредственно в процессе бурения и передачи сигнала по беспроводному каналу забоя с устьем скважины путем усовершенствования конструкции. Устройство для измерения зенитного угла искривления скважины, содержащее корпус, рамку-маятник с эксцентричным грузом, в которой расположены маятниковый датчик больших углов и блок маятниковых датчиков малых углов, включает два реостатных преобразователя, взаимодействующих с заключенными между неподвижными упорами маятниками большой длины, оси качания которых перпендикулярны оси вращения рамки-маятника. В рамке-маятнике установлен дополнительно источник питания - аккумулятор, преобразователь датчика больших углов выполнен в виде полевого датчика Холла, жестко закрепленного в рамке-маятнике, взаимодействующего с магнитным полем постоянного магнита, жестко закрепленного на свободном конце маятника датчика больших углов. При этом холловские электроды полевого датчика Холла соединены со входом жестко закрепленного в рамке-маятнике аналого-цифрового преобразователя, выход которого соединен со входом преобразователя кода в частоту импульсов, а его выход соединен со входом делителя импульсов, выход которого через коллектор соединен с каналом связи. Преобразователь датчика малых углов также выполнен в виде дополнительного датчика Холла. При этом его маятник снабжен дополнительным постоянным магнитом, жестко закрепленным на его свободном конце, и его магнитное поле воздействует на дополнительный полевой датчик Холла, жестко закрепленный в рамке-маятнике, холловские электроды которого соединены параллельно с холловскими электродами основного полевого датчика Холла. Длина маятника датчика малых углов в два раза больше длины маятника датчика больших углов, а датчики Холла установлены возле упоров. 1 ил.
Устройство для измерения зенитного угла искривления скважины, содержащее корпус, рамку-маятник с эксцентричным грузом, в которой расположены маятниковый датчик больших углов и блок маятниковых датчиков малых углов, включающий два реостатных преобразователя, взаимодействующих с заключенными между неподвижными упорами маятниками большой длины, оси качания которых перпендикулярны оси вращения рамки-маятника, отличающееся тем, что в рамке-маятнике установлен дополнительно источник питания - аккумулятор, преобразователь датчика больших углов выполнен в виде полевого датчика Холла, жестко закрепленного в рамке-маятнике, взаимодействующего с магнитным полем постоянного магнита, жестко закрепленного на свободном конце маятника датчика больших углов, холловские электроды полевого датчика Холла соединены со входом жестко закрепленного в рамке-маятнике аналого-цифрового преобразователя, выход которого соединен со входом преобразователя кода в частоту импульсов, а его выход соединен со входом делителя импульсов, выход которого через коллектор соединен с каналом связи, преобразователь датчика малых углов также выполнен в виде дополнительного датчика Холла, при этом его маятник снабжен дополнительным постоянным магнитом, жестко закрепленным на его свободном конце, и его магнитное поле воздействует на дополнительный полевой датчик Холла, жестко закрепленный в рамке-маятнике, холловские электроды которого соединены параллельно с холловскими электродами основного полевого датчика Холла, при этом длина маятника датчика малых углов в два раза больше длины маятника датчика больших углов, а датчики Холла установлены возле упоров.
| Инклинометр | 1983 |
|
SU1134705A1 |
| ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 0 |
|
SU222309A1 |
| Инклинометр | 1978 |
|
SU798279A1 |
| Инклинометр | 1982 |
|
SU1082939A1 |
| ИНКЛИНОМЕТР | 1995 |
|
RU2111454C1 |
| WO 1985004708 A1, 24.10.1985. | |||

