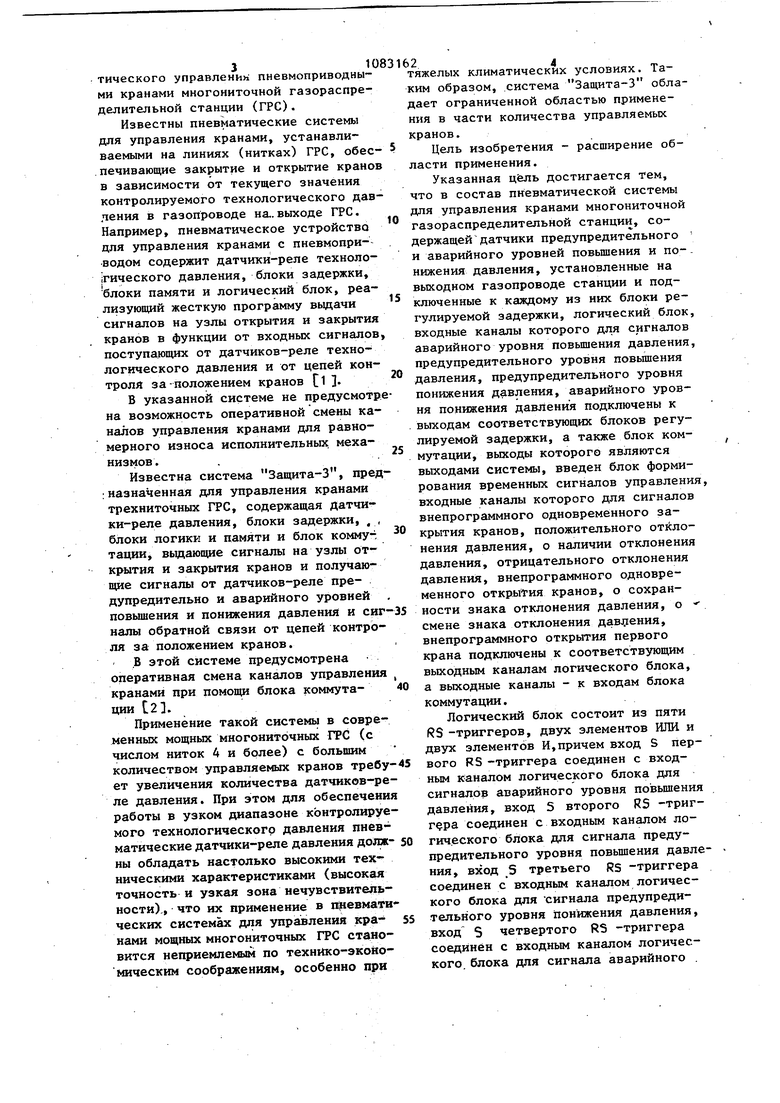
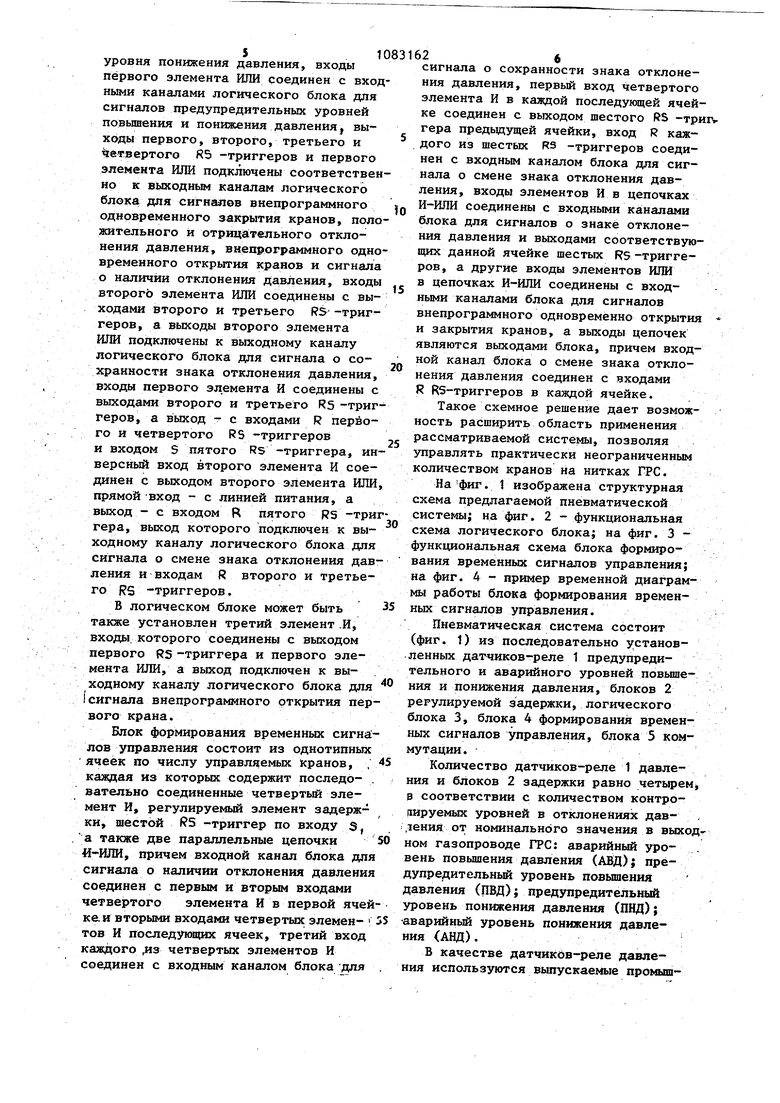
2. Система по п.1, отли чающаяся тем, что логический блок состоит из пйти RS -триггеров, двух элементов ШЖ и двух элементов И, причем вход S первого RS -триггера соединен с входным каналом логического блока для сигнгшов аварийного уровня повьшения давления, вход § второго RS -триггера соединен с входным каналом логического блока дл сигнала предупредительного уровня повышения давления, вход S третьег RS -триггера соединен с входным кана лом логического блока для сигнала предупредительного уровня понижения давления, вход S четвертого (5-три гера соединен с входным каналом логического блока для сигнала аварий ного уровня понижения давления, входры первого элемента ИЛИ соединены с входньв4И Каналами логического блока для сигналов предупредительных уровней повьшення и понижения давления, выходы первого, второго, третьего и четвертого R5 -триггеров и первого элемента ИЛИ подключены соответственно к выходным каналам логического блока да1я сигналов внепрограммного одновременного закрытия кранов, положительного и отрицательного отклонения давления,внепрограммного одновременно го. открытия кранов и сигналов о наличии отклонения давления, входы второго элемента ИЛИ соединены с.выходами второго и третьего RS -триггеров, а вькоды второго элемента ШМ подключены к выходному каналу логического блока для сигнала; о сохранности знака отклонения давления, входы первог элемента И соединены с выходами второго и третьего RS -триггеров, а выход - с входами R первого и четвертого R9 -триггеров и входом S пятого RS -триггера, инверсный вход второго элемента И соединен с выходом второго элемента ИЛИ, прямой вхо с линией питанияj а выход - с входом R пятого RS -триггера, выход которого подключен к выходному каналу ло гическогр блока для сигнала о смене знака отклонения давления и входам R второго и третьего Rs-триггеров. 62 3.Система по п. 2, отличающаяся тем, что в логическом блоке установлен третий элемент И, входы которого соединены с выходом первого -триггера и первого элемента ИЛИ, а выход подключен к выходному каналу логического блока для сигнала внепрограммного открытия первого крана, 4.Система поп.1, отличающаяся тем, что блок формирования временных сигналов зшравления состоит из однотипных ячеек по числу управляемых кранов, каждая из которых содержит последовательно соединенные четвертый элемент. И, регулируе1 1й элемент задержки, шестой RS -триггер по входу 5 , а также две параллельные цепочки И-ШШ, причем входной канал блока для сигнала о наличии отклонения давления соединен с первым и вторым входами четвертого элемента И в первой ячейке и вторыми входами четвертых элементов И последукицих ячеек, третий вход каждого из четвертых элементов И соединен с входнЬ1м каналом блока для сигнала о сохранности знака отклонения давления, первый вход четвертого элемента Ив каждой последующей ячейке соединен с выходом щестого RS -триггера прёдьщущей ячейки, вход R каждого из шестых RS -триггеров соединен -с входным каналом блока для сигнала о смене знака отклонения давления, входы элементов И в цепочках И-ИШ соединены с входными каналами блока для сигналов о знаке отклонения давления и выходами соответствующих данной ячейке шестых ftS -триггеров, а другие входы элементов ИЛИ в цепочках И-ИЛИ соединены .с входными каналами блока для сигналов внепрограммного одновременного открытия и закрытия кранов, а выходы цепочек являются выходами блока, причем входной канал блока о смене знака отклонения Давления соединен с входами R RS-триггеров в каждой ячейке. , . :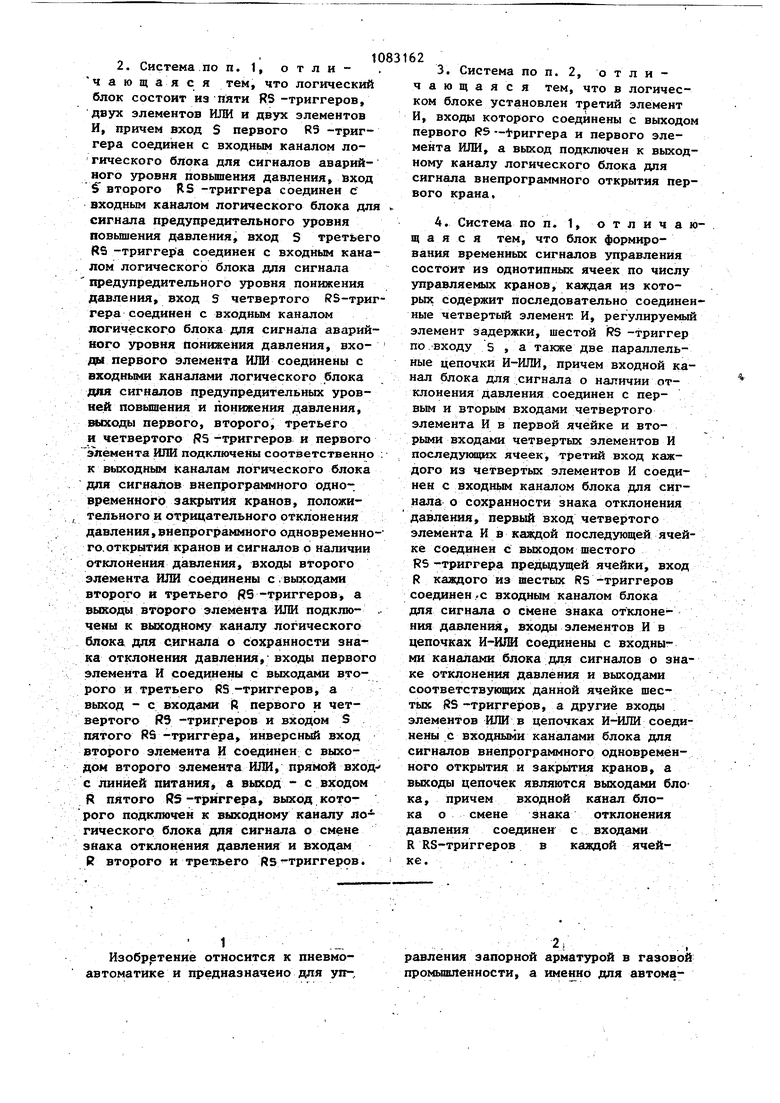

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для технологической сигнализации | 1987 |
|
SU1456982A1 |
| Устройство для автоматического управления водоотливной установкой | 1989 |
|
SU1656499A1 |
| Система регулирования температуры аэросмеси углеразмольной мельницы | 2015 |
|
RU2606083C1 |
| Импульсный стабилизатор переменного напряжения | 1987 |
|
SU1493987A1 |
| УСТРОЙСТВО ДЛЯ ОПЕРАТИВНОЙ БЕСПРОВОДНОЙ СВЯЗИ С ПОДЗЕМНЫМИ ВЫРАБОТКАМИ | 1999 |
|
RU2158368C1 |
| Многоканальное устройство для стабилизации постоянного напряжения | 1984 |
|
SU1264156A2 |
| Устройство допускового контроля параметров | 1991 |
|
SU1798719A1 |
| Устройство для определения междуфазных замыканий и замыканий на землю в сетях с изолированной нейтралью напряжением 6-10 кВ | 2022 |
|
RU2788035C1 |
| Система контурного управления промышленного робота | 1986 |
|
SU1430256A1 |
| Устройство допускового контроля параметров | 1991 |
|
SU1800380A1 |
1. ПНЕВМАТИЧЕСКАЯ СИСТЕМА ДЛЯ УПРАВЛЕНИЯ КРАНАМИ ШОГОНИТОЧНОЙ ГАЗОРАСПРЕДЕЛИТЕЛЬНОЙ СТАНЦИИ, содержащая датчики предупредительно го и аварийного уровней повышения и понижения;давления установленные на выходном газопроводе станции и подключенные к каждому нз них блоки регулируемой задержки, логический блок, входные каналы которого для сигналов аварийного уровня повышения давления, предупредительного уровня повышения давления, предупредительного уровня понижения давления, аварийного уровня понижения давления подключены к выходам соответствующих блоков регулируемой задержки, а также блок коммутации, выходы которого являются выходами системы, отличающаяся тем, что, с целью 1 асширения области применения, она содержит блок формирования временных сигналов управления, входные каналы которого для сигналов внепрограммноi го одновременного закрытия кранов, (О положительного отклонения давления, о наличии отклонения давления, отрицательного отклонения давления, внепрограммного одновременного открытия кранов, о сохранности знака отклонения давления, о смене знака отклонения давления внепрограммного открытия первого крана подключены к соответствующим выходным канаОд О) лам логического блока, а выходные каналы - к входам блока коммутации. IND 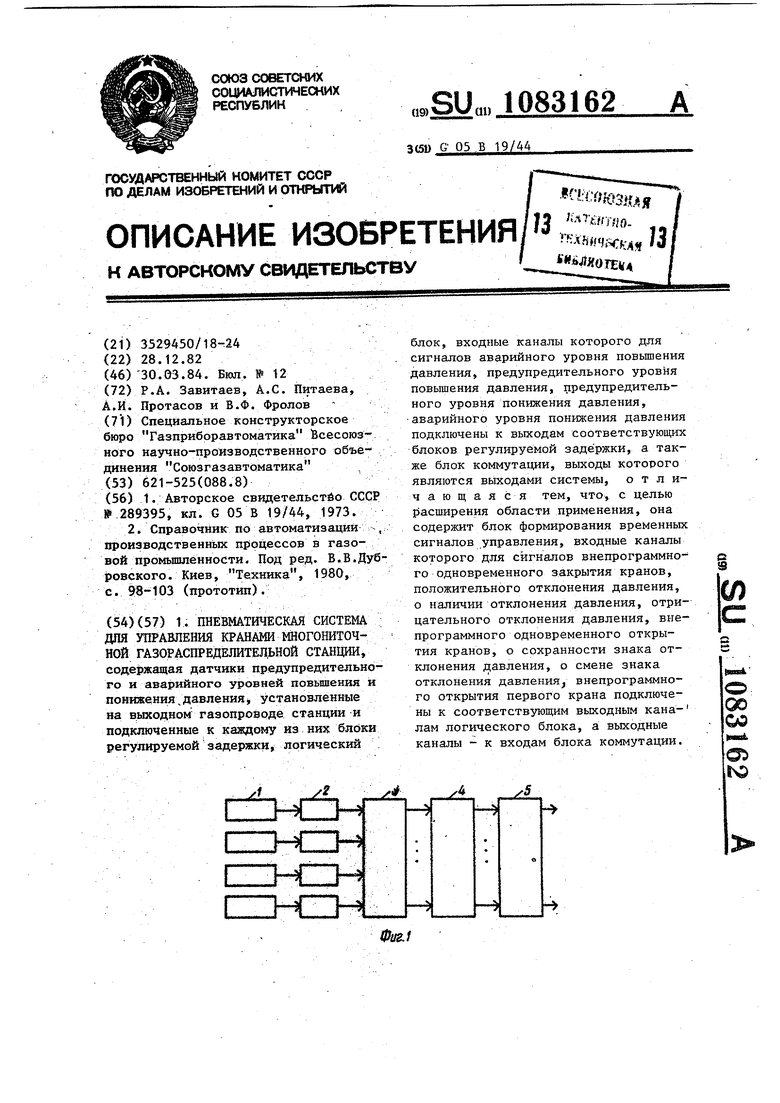
, 1
Изобр,етение относится к пневмоавтоматике и предназначено для уп-.
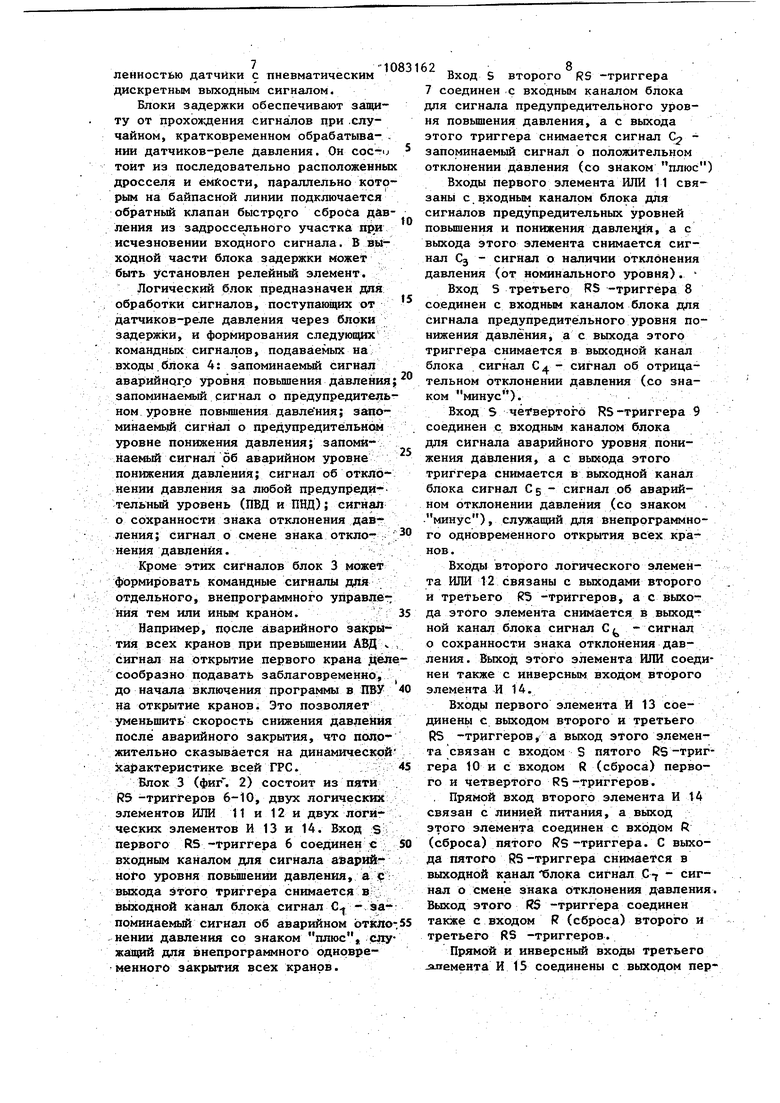
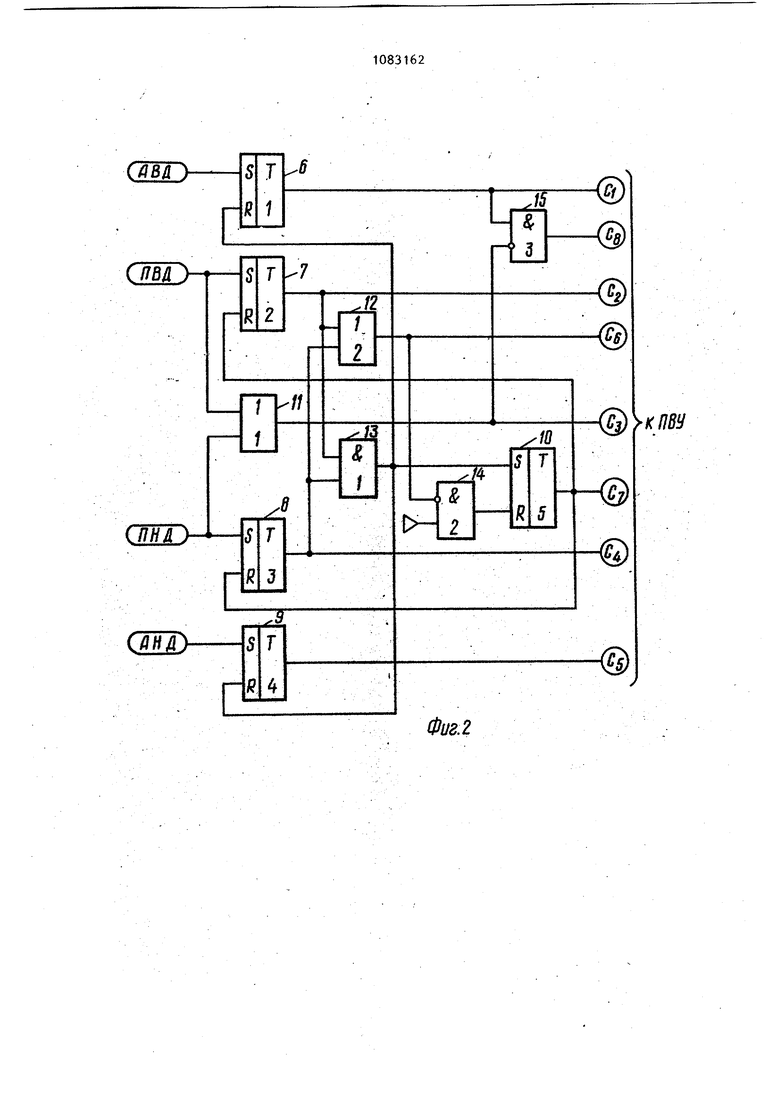
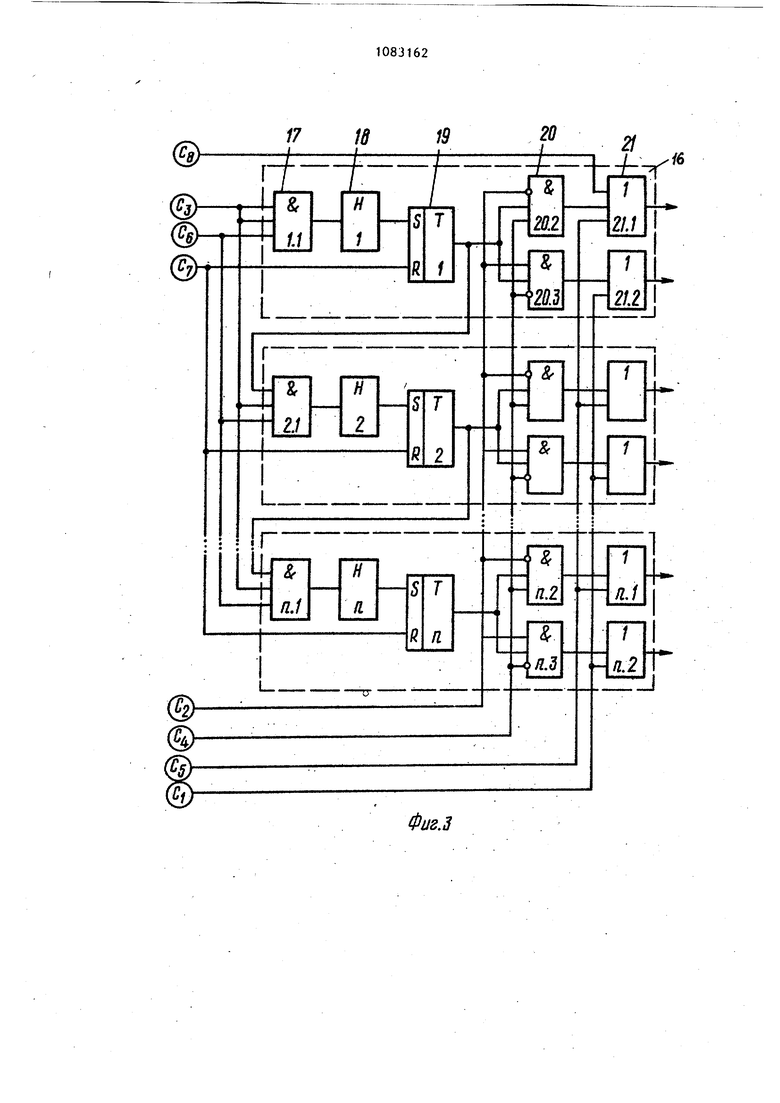
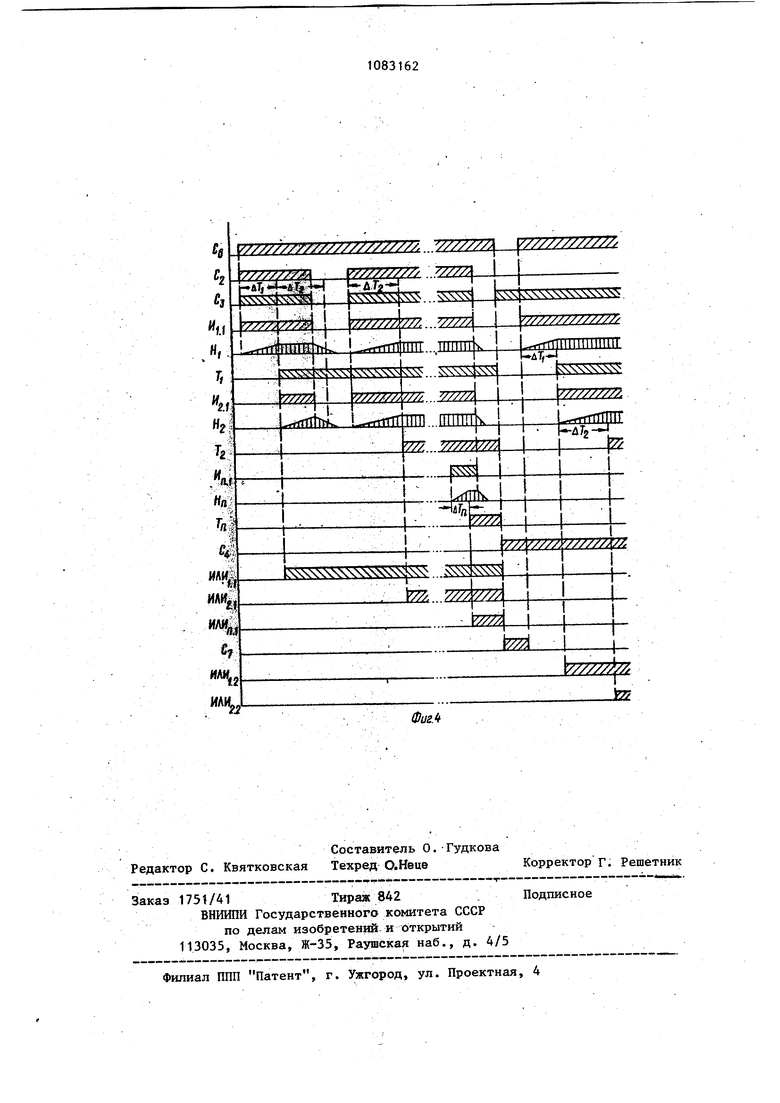
равления запорной арматурой в газовой промышленности, а именно для автоматического управлений пневмоприводными кранами многониточной газораспределительной станции (ГРС), Известны пневматические системы для управления кранами, устанавливаемыми на линиях (нитках) ГРС, обес печиваюпще закрытие и открытие крано в зависимости от текущего значения контролируемого технологического дав ления в газопроводе на., выходе ГРС. Например, пневматическое устройство для управления кранами с пневмоприводом содержит датчики-реле техноло|гического давления, блоки задержки, блоки памяти и логический блок, реализующий жесткую программу вьщачи сигналов на узлы открытия и закрытия кранов в функции от входных сигналов поступающих от датчиков-реле технологического давления и от цепей контроля: за-положением кранов В указанной системе не предусмотр на возможность оперативной смены каналов управления кранами для равномерного износа исполнительных, механизмов. Известна система Защита-3, пред ;назначенная для управления кранами трехниточных ГРС, содержащая датчики-реле давления, блоки задержки, , блоки логики и памяти и блок комму-, тации, выдающие сигналы на узлы открытия и закрытия кранов и получающие сигналы от датчиков-реле предупредительно и аварийного уровней повышения и понижения давления и сиг налы обратной связи от цепей контроля за положением кранов. В этой системе предусмотрена оперативная смена каналов управления кранами при помопц блока коммутации t2. Применение такой системы в современных мощных многониточных ГРС (с числом ниток А и более) с большим количеством управляемых кранов требу ет увеличения количества датчиков-ре ле давления. При этом для обеспечени работы в узком диапазоне контролируе мого технологического давления пневматические датчики-реле давления должны обладать настолько высокими техническими характеристиками (высокая точность и узкая зона нечувствительности),, что их применение в т евматн ческих системах для управления кранами мощных многониточных ГРС становится неприемлемым по технико-экономическим соображениям, особенно при 1 2 тяжелых климатических условиях. Таким образом, .система Защита-3 обладает ограниченной областью применения в части количества управляемых кранов. Цель изобретения - расширение области применения. Указанная цель достигается тем, что в состав пневматической системы для управления кранами многониточной газораспределительной станции, содержащей датчики предупредительного и аварийного уровней повьшения и по-нижения давления, установленные на вьтходном газопроводе станции и подключенные к каждому из них блоки регулируемой задержки, логический блок, входные каналы которого для сигналов аварийного уровня повышения давления, предупредительного уровня повьш1ения давления, предупредительного уровня понижения давления, аварийного уровня понижения давления подключены к выходам соответствующих блоков регулируемой задержки, а также блок коммутации, выходы которого являются выходами Системы, введен блок формирования временных сигналов управления, входные каналы которого для сигналов внепрограммного одновременного закрытия кранов, положительного отклонения давления, о наличии отклонения давления, отрицательного отклонения давления, внепрограммного одновременного открытия кранов, о сохранности знака отклонения давления, о смене знака отклонения дaвJ Ieния, внепрограммного открытия первого крана подключены к соответствующим выходным каналам логического блока, а выходные каналы - к входам блока коммутации. Логический блок состоит из пяти -триггеров, двух элементов ИЛИ и двух элементов И,причем вход S первого RS -триггера соединен с входным каналом логического блока для сигналов аварийного уровня повышения давления, вход 5 второго RS -тригг ра соединен с входным каналом логического блока для сигнала предупредительного уровня повьщ1ения давления, вход 5 третьего RS -триггера соединен с входным каналом логического блока для -сигнала предупредительного уровня понижения давления, вход S четвертого RS -триггера соединён с входным каналом логического, блока для сигнала аварийного . уровня понижения давления, входы первого элемента ИЛИ соединен с вход ными каналами логического блока для сигналов предупредительных уровней повышения и понижения давления, выходы первого, второго, третьего и leTBepToro R5 -триггеров и первого элемента ИЛИ подключены соответствен но к выходным каналам логического блока для сигналов внепрограммного одновременного закрытия кранов, поло жительного и отрицательного отклонения давления, внепрограммного одно временного открытия кранов и сигнала о наличии отклонения Давления, входы второго элемента ИЛИ соединены с выходами второго и третьего RS--триггеров, а выходы второго элемента ИЛИ подключены к выходному каналу логического блока для сигнала о сохранности знака отклонения давления, входы первого элемента И соединены с выходами второго и третьего R5 -триг геров, а выход - с входами R первого и четвертого R5 -триггеров и входом S пятого RS -триггера, ин версный вход второго элемента И соединен с выходом второго элемента ИЛИ прямой вход - с линией питания, а выход - с входом R пятого RS три Гера, выход которого подключен к выходному каналу логического блока для сигнала о смене знака отклонения дав ления и входам R второго и третьего RS -триггеров. В логическом блоке может быть также установлен третий элемент .И, входы, которого соединены с выходом первого RS -триггера и первого элемента ИЛИ, а выход подключен к выходному каналу логического блока для {сигнала внепрограммного открытия первого крана. Блок формирования временных сигналов управления состоит из однотипных ячеек по числу управляемых кранов, , каждая из которых содержит последо- . вательно соединенные четвертый элемент И, регулируемый элемент задержки, шестой -триггер по входу S, а также две параллельные цепочки Й-ШШ, причем входной канал блока для сигнала о наличии отклонения давления соединен с первым и вторым входами четвертого элемента И в первой ячей ке и вторыми входами четвертых элементов И последз ющих ячеек, третий вход каждого 13 четвертых элементов И соединен с входным каналом блока для t 26 сигнала о сохранности знака отклонения давления, первьй вход четвертого элемента И в каждой последующей ячейке соединен с выходом шестого RS -тригг гера предьщущей ячейки, вход R каждого из шестых RS -триггеров соединен с входным каналом блока для сигнала о смене знака отклонения давления, входы элементов Ив цепочках И-ИЛИ соединены с входными каналами блока для сигналов о знаке отклонения давления и выходами соответствующих данной ячейке шестых R5 -триггеров, а другие входы элементов ИЛИ в цепочках И-ИЖ соединены с входными каналами блока для сигналов внепрограммного одновременно открытия и закрытия кранов, а выходы цепочек являются выходами блока, причем входной канал блока о смене знака отклонения давления соединен с входами К RS-триггеров в каждой ячейке. Такое схемное решение дает возможность расширить область применения рассматриваемой системы, позволяя управлять практически неограниченным количеством кранов на нитках ГРС. На фиг. 1 изображена структурная схема предлагаемой пневматической системы; на фиг. 2 - функциональная схема логического блока; на фиг. 3 - функциональная схема блока формирования временных сигналов управления; на фиг. 4 - пример временной диаграмы работы блока формирования временных сигналов управления. Пневматическая система состоит (фиг. 1) из последовательно установленных датчиков-реле 1 предупредительного и аварийного уровней повьш1ения и понижения давления, блоков 2 регулируемой задержки, логического блока 3, блока 4 формирования временных сигналов управления, блока 5 коммутации. Количество датчиков-реле 1 давления и блоков 2 задержки равно четырем э соответствии с количеством контротаруемых уровней в отклонениях дав,1ения от номинального значения в выход ном газопроводе ГРС: аварийный урО- . вень повышения давления (АВД); предупредительный уровень повышения давления (ПВД); предупредительный уровень понижения давления (ПНД); аварийный уровень понижения давления АНД). В качестве датчикбв-реле давлеия используются выпускаемые промыш71ленностью датчики с пневматическим дискретным выходным сигналом. Блоки задержки обеспечивают защи ту от прохохсдения сигналов при .случайном, кратковременном обрабатыва- , НИИ датчиков-реле давления. Он сос-и тоит из последовательно расположенны дросселя и емкости, параллельно кото рым на байпасной линии подключается обратный клапан быстрр.го сброса дав ления из задроссельного участка исчезновении входного сигнала. В выходной части блока задержки может быть установлен релейный элемент. Логический блок предназначен для обработки сигналов, поступающих от датчиков-реле давления через блоки задержки, и формирования следующих командных сигналов, подаваемых на входы блока 4: запоминаемый сигнал аварийногр уровня повышения давления запоминаемый сигнал о предупредитель ном уровне повьпвения давления; заяоминаемьй сигНал о предупредительном уровне понижения давления; запоминаемый сигнал об аварийном уровне понижения давления; сигнал об отклЬ Нении давления за любой предупреди-, тельньй уровень (ОВД и ПНД); сигнал о сохранности знака отклонения давления; сигнал о смене знака откло- ; нения давления. Кроме этих сигналов блок 3 формировать командные сигналы для отдельного, внепрограммного управления тем или иным краном. Например, после аварийного закрытия всех кранов при превьшении АВД V сигнал на открытие первого крана .цел сообразно подавать заблаговременно, до начала включения программы в ПВУ на открытие кранов. Это позволяет уменьшить скорость снижения давлейия после аварийного закрытия, что положительно сказывается на динамической характеристике всей ГРС. Блок 3 (фиг. 2) состоит из пяти R5 -триггеров 6-10, двух логических элементов ИЛИ 11 и 12 и двух лОгических элементов И 13 и 14. Вход S; первого RS -Триггера 6 соединен с входным каналом для сигнала alBapUJtrHofo уровня повьшении давления, а С: выхода этого триггера снимается в выходной канал блока сигнал С - эапоминаемый сигнал об аварийном нении давления со знаком плюс, слу жащий для внепрограммного одновременного закрытия всех кранов. 9 ft Вход S второго RS -триггера 7 соединен с входным каналом блока для сигнала предупредительного уровня повышения давления, а с выхода этого триггера снимается СИГНЕШ С2 запоминаемый сигнал о положительном отклонении давления (со знаком плюс) Входы первого элемента ИЛИ 11 связаны с.входным каналом блока для сигналов предупредительных уровней повышения и понижения давлен р я, а с выхода этого элемента снимается сигнал Сз - сигнал о наличии отклонения давления (от номинального уровня). Вход 5 третьего RS -триггера 8 соединен с входным каналом блока для сигнала предупредительного уровня понижения давления, ас выхода этого триггера снимается в выходной канал блока сигнал С ц. - сигнал об отрицательном отклонении давления (со знаком минус). Вход S четвертого RS -триггера 9 соединен с входным каналом блока для сигнала аварийного уровня понижения давления, а с выхода этого триггера снимается в выходной канал блока сигнал С g - сигнал об аварийном отклонении давления (со знаком минус), служащий для внепрограммного одновременного открытия всех кранов. ..., . ; . . , Входы второго логического элемента ИЛИ 12 связаны с выходами второго и третьего R5 -триггеров, а с вькода этого элемента снимается в выходной канал блока сигнал С - сигнал о сохранности знака отклонения давления. Выход этого элемента ШШ соединен также с инверсным входом второго элемента И 14. Входы первого элемента И 13 соединены с выходом второго и третьего RS -триггеров, а выход этого элемента связан с входом S пятого RS-триггера 10 и с входом R (сброса) первого и четвертого RS-триггеров. . Прямой вход второго элемента И 14 связан с линией питания, а выход этого элемента соединен с входом R (сброса) пятого f S-триггера. С выхода пятого RS-триггера снимаемся в выходной канал блока сигнал С 7 - сигнал о смене знака отклонения давления. Выход этого RS -триггера соединен также с входом R (сброса) второго и третьего RS -триггер1ов. Прямой и инверсный входы третьего -аяемента И 15 соединены с выходом первого RS -триггера и с выходом первого логического элемента ИЛИ соответственно, а с выхода этого элемен та И снимается в выходной канал сиг нал Сд - сигнал внепрограммного откр тия первого крана. Блок 4 предназначен для того, чтобы в зависимости от сочетания и длительности командных сигналов вырабатывать серии последовательных сигналов, подаваемых с заданными ин тервалами времени через блок 5 коммутации к узлам открытия и закрытия кранов. Количество сигналов, выраба тываемых блоков на открытие или закрытие кранов, определяется длитель ностью отклонения давления от номинального значения в выходном газопр воде ГРС. Интервалы времени между вьщачей сигналов настраиваются по к кретным условия ГРС. Из логического блока на входы бл ка 4 поступают следующие командные с игналы; С - сигнал внепрограммного одновременного закрытия кранов; С2 сигнал положительного отклонения дав ления (+ ЛР); Сд - сигнал о наличии отклонения давления (лр); С - сигнал отрицательного отклонения давления (-лр); С - сигнал внепрограм много ,одно временно го открытия кранов С - сигнал о сохранности знака Лр о смене-знака Лр; Cg С - сигнал сигнал внепрограммного открытия 1-го крана (могут поступать и другие командные сигналы на внепрограммное от крытие и закрытие любого управляемог крана). Блок 4 формирования временных сигналов управления состоит из однотипных ячеек 16, количество которых равно количеству управляемых кранов Каждая ячейка содержит следующие последовательно соединенные элементы (фиг. 3): четвертьй элемент И 17, регулируемый элемент 18 задержки, , шестой RS -триггер 19 по входу S. Выход RS-триггера соединен с двумя . параллельными цепочками И-ИЛИ,каждая из которых содержит последовательно соединенные элемент И 20 (20. 2; 20.3 -п .2;п,.3) по прямому входу (элемент имеет инверсные выходы для реализации функции ЗАПРЕТ) ш , элемент ИЛИ 21 (21.1; 21.2 :п.1, п. 2). В каждом бдоке 4 канал сигнала С соединен с входом элемента ИЛИ 2 в цепочке И-ИЛИ, связанной с узлами 6210 закрытия крана, через блок 5. Канал сигнала С 2 в каждом блоке 4 соединен с прямым входом элемента И 20 в цепочке И-ИЛИ, связанной с узлом закрытия кранов, и с инверсным входом элемента И в другой цепочке И-ИЖ этой же ячейки, связанной с узлом открытия крана. Канал сигнала С, связан с первым H BTOpbJM входами элемента И первой ячейки и с вторым входом элемента И в последующих ячейках. Канал сигнала С в каждой ячейке соединен с прямым входом И 20 в цепочке И-ИЛИ, связанной с узлом открытия крана, и с инверсным входом элемента И в цепочке И-ИЛИ, связанной с узлом закрытия крана. Канал Cg соединен в каждой ячейке с входом элемента ИЛИ 21 в цепочке И-ИЛИ, связанной с узлами открытия крана. Канал сигнала С, связан с третьим входом элемента И 17 в каждой ячейке. Канал сигнала С- соединен с входом R (сброса) R5 -триггера 19 в каждой ячейке. Канал сигнала Сд соеди- . нен с первой ячейкой, с входом элемента ИЛИ 21 в цепочке И-ИЛИ, связанной через коммутатор с узлом открытия крана. Другие командные ригналы внепрограммного раздельного управления открытием и закрытием кранов (при необходимости) также соединяются с входом элемента ИЛИ в соответствующей цепочке И-ИЛИ. . Для СВ.ЯЗИ между ячейками выход R5 -триггера данной я.чейки соединен с входом входного элемента И в последующем блоке. Блок коммутации представляет собой простую клеммную колодку, позволяющую оперативно осуществлять легкую периодическую перекоммутацию линий, ведущих к узлам открытия и закрытия кранов, для смены последовательности срабатывания кранов без каких-либо изменений в блоке 4. В качестве узлов управления могут быть использованы, например, узлы управления пневматические. Система работает следукнцим образом. При отклонении технологического давления, например при превышении ПВД срабатывает соответствующий датчикреле Т давления и сигнал от него ерез блок 2 задержки поступает в лок 3, который вырабатывает командные с 1гналы, по которым начинает раотать блок 4, последовательно вьщаюий сигналы с заданными интервалами 11 ,. времени на управление (в данном случае на закрытие) кранов одного за другим. Если при этом сигнал от датчиков-реле давления исчезнет, то блок 4 остановит работу (прекратит набор программы), не выдавая сигнало на закрытие пос; дующих кранов. Если далее вновь возникнет, этот же сигна от датчика-реле давления, то блок 4 продолжит свою работу и при достаточ ной длительности сигнала ot датчикареле давления могут закрыться всё краны ГРС. При появлении отклонения давления с противоположным знаком (сигнал о снижении ниже ПНД) блок А сбрасывает набранную им ранее программу (краны ГРС при этом останутся в том положении, в котрром произошел сброс программы с блока 4) и начинает вно работу, выдавая последовательные сиг налы с заданньм интервалом времени на.открытие кранов в зависимоети- от длительности этого сигнала. Таким образом, появление сигнала от датчика-реле давления с одним знаком вызывает работу блока 4 по набору программы, а исчезновение этого сигнала - прекращение работы блока 4. Появление сигнала от датчи ка-реле давления с противоположным знаком вызывает сброс програмкоа и вновь -работу по набору программы. При отклонении давления свыше АВД или ниже АНД по сигналу от соответствующего датчика-реле давления блок 3 вьздает команду на одновременное внепрограммное (независимо от на бора программы) открытие либо закрытие кранов - сигналы С или Се , В зависимости от конкретной схемы блок 3 может также вьщавать команды на внепрограммное отдельное управление каким-либо краном, например команду Cg на открытие первого крана. Сигналы С - Cg в блоке 3 Bbipaбатываются в соответст1вии с фун;КВ1иями первого, второго, третьего и четвертого R5-триггеров, а также первого логического элемента ИШ (4я1Г.З При отсутствии сигналов об отклонении давления за предедш ПВД и НВД и отсутствии запомненных сигнало на выходе второго и третьего RS -три геров отсутствует сигнал С и сигнал на входе S пятого RS -триггера, в то время как на вход R(сброса) это го RS -триггера подается сигнал 212 с выхода второго логического элемента И. При появлении отклонения давления вьппе ПВД возникают сигналы С2 и С и исчезает сигнал на выходе второго логического элемента И. Дальнейшее увеличение давления не приводит к изменению состояния сигналов С2 , С и С-,. При доследующем снижении давления ниже ПВД эти сигналы тоже не изменяются, пока давление не опустится ниже ПНД, что вызовет появление сигнала С, сигнала на выходе первого логического элемента И, срабатывание по входу 5 пятого PS -триггера и появление .сигнала С-. Одновременно с выхода этого логического элемента И проходят сигналы на вход R (сброса) второго и третьего триггеров, исчезают сигналы Cg, Q и С и сигнал на выходе первого логического элемента И. Исчезает сигнал на входе S и возникает сигнал на входе R пятого RS -триггера. Исчезает сигнал С- и сигналы на входе R второго и третьего iRS -триггеров. Вновь возникают сигналы С и Cg Таким образо14, при изменении отклонения давления с положительного на отрицательное возникает сигнал -С и исчезает сигнал С, затем вновь исчезает сигнал С-, и возникает сигнал С. При этом сбрасывается сигнал Су, возникает и кратковременно исчезает (на время выдачи сигнала С) сигнал €4. Аналогично при изменении отклоне ния давления с отрицательного на положительное возникает сигнал С, сбрасьшая сигнал Сл, и кратковременно на время вьщачи сигнала С - сигналы 2. и С. Сигнал Со возникает, если после отклонения давления вьше АВД давление затем снижается ниже ПВД. Это позволяет заблоговременно, еще до сиижения давления ниже ЦНД, открыть кран, уменьшая этим скорость снижения давления, обеспечивая более плавную динамику измеиения давления на выходе ГРС. Работа блока 4 по програю е пояснена временной диаграммой. При nojja4e на вход блока, - например, сигнала Ci (свидетельствующего о превышении ПВД) одновременно подаются сигналы Cj и С. По истечении времени задержки ЛТ, определяемого настройкой элемента 18 задержки в первой ячейке, срабатывает
RS-триггер и на выходе первой ячейки блока возникает сигнал, подаваемый в узел закрытия крана по цепочке И ИЛИ Если длительность сигнала Cj менее суммарного времени задерж- s ки Т2, определяемого настройкой элементов 18 задержки в первых двух ячейках, то после исчезновения сигнала С (с одновременным исчезновением и команды Со) набор программы оста- 10 навливается, так как не успевает сработать RS -триггер во второй ячейке. В дальнейшем, если вновь возникает отклонение давления того же знака, что и ранее, и на входы блока 4 по- 15 даются сигналы С2 и С достаточно предположительное время, то обрабатывается дальнейший набор программы: через времй 4 срабатывает триггер во второй ячейке и на его вьпсоде, а 20 также на выходе второй ячейки возникает сигнал, подаваемьй в узел закрытия второго крана по цепочке И. ЙЛИ2 2 Далее происходит последовательное срабатьшание во всех ячейках.25 Последним срабатывает (5-триггер в п -и ячейке и подается сигнал в узел
закрытия крана по цепочке И -ИЛИ,.
Последующее сохранение или исчезнозение отклонения давления свьше зо ПВД и сигналов С и С соответственно не оказьшают влияния на состояние . набранной в блоке 4 программы.
Если же в какой-то момент набора программы или после ее набора возникает отклонение давления ниже ОВД и на вход блока подается сигнал С (одновременно подается сигнал С), то при этом одновременно прекращается подача сигнала С| и подается сиг- 40 нал С- на входы RS -триггеров, вызйвающий сброс программы. После исчезновения сигнала С и появления сигнала Ct вновь начинается набор программы, но теперь выходные сигналы 45 от элементов ИЛИ подаются по узлам уяравления открытием кранов, начи- , яая с первой ячeйkи..
Таким образом, командные сигналы, при работе блока 4 по программе елу- JQ ат для следуювщх целей: С, Ся - разрешение на начало набора и на продолжение набора программы; С - сигнал на сброс наборной про- / граммы.
Использование предлагаемой пневматической системы позволяет обеспечивать управление пневмоприводными кранами на современных мощных многониточных ГРС с любым количество управляемых кранов, так как количество блоков 4 можно наращивать практически неограниченно.
Пневматическая система обладает большей чувствительностью, чем аналоги, на изменение технологического давления,она реагирует не только на появление сигнала об отклонении давления, но и на длительность этого отклонения. При зтом обеспечивается лучшая динамическая характеристика ГРС в целом за счет того, что при повторном появлении сигнала Л р того же знака процесс открытия или закрытия кранов не происходит заново, т.е начиная с первого крана, а с последующих кранов, на которых этот процесс был остановлен.
Улучшение динамической характеристики конкретной ГСР может достигаться и за счет изменения временньос интервалов между последовательным Открытием или закрытием кранов.
Уменьшается также число срабатываний кранов, открываемых в начале набора пpoгpaм G I, что положительно сказывается на снижении эксплуатационных затрат.
Уменьшается количество требуемых: датчиков- реле давления, так как для выработки команД| подаваемых в ПВУ для управления программой, достаточн четырех датчиков-реле независимо от количества управляемых кранов.
С уменьшением количества датчиков-реле давления снижается число линий связи с технологическим объектом, что облегчает монтаж и наладк системы. Число линий связи уменьшается и потому, что по сравнению с аналогами отпадает необходимость подачи сигналов обратной связи от цепей контроля за положением кранов, в результате чего упрощается устройство цепей контроля за положением кранов.
С учетом широкого использования ГРС в народном хозяйстве применение изобретения даст значительный технико-экономический эффект.
КПВУ
Фиг. 2
Фиг.З
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ПНЕВМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ КРАНАМИ С ПНЕВМОПРИВОДОМ | 0 |
|
SU289395A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Справочник по автоматизации , ороиэводственньк процессов в газовой промышленности | |||
| Под ред | |||
| В.В.Дубровского | |||
| Киев, Техника, 1980, с | |||
| (прототип). | |||
