Изобретение относится к машиностроению и может быть использовано для управления перемещением рабочего органа промышленного робота, например при автоматизации процесса сварки.
Целью изобретения является упрощение конструкции и повышение точности фиксации положения звеньев робота за счет снятия информации о положении звеньев робота в процессе записи программы непосредственно с обмоток исполнительного ша- гового двигателя, используемого в процессе обучения в качестве датчика положения звеньев.
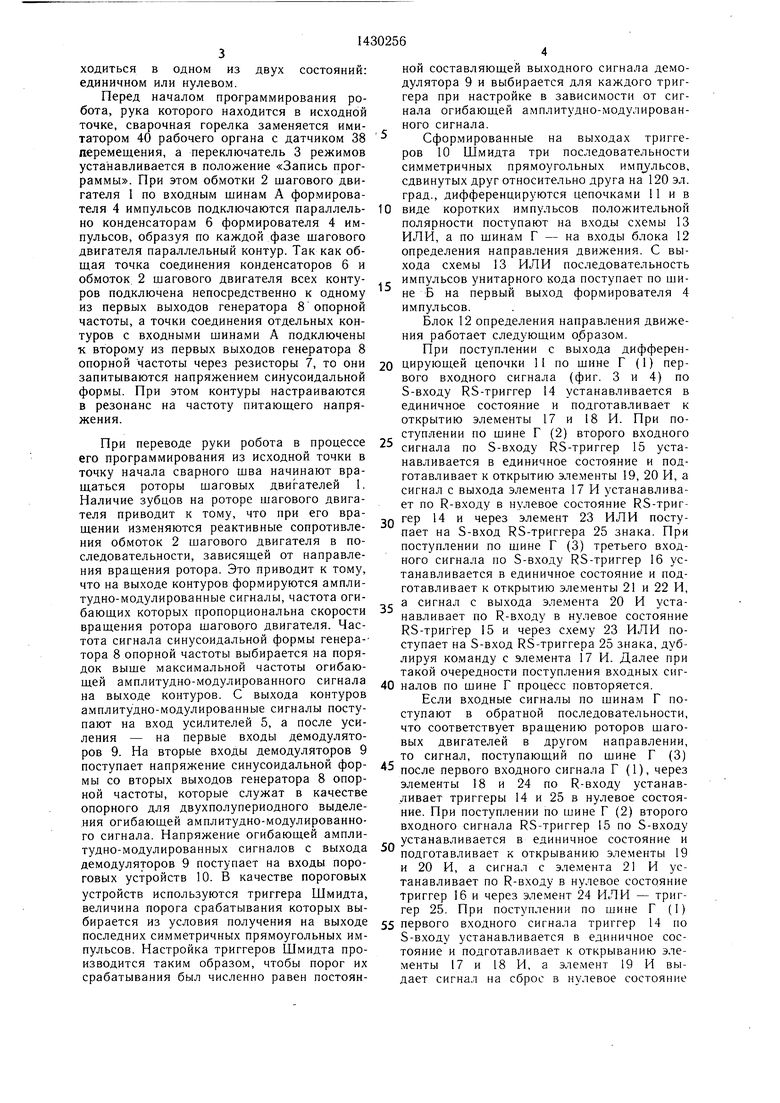
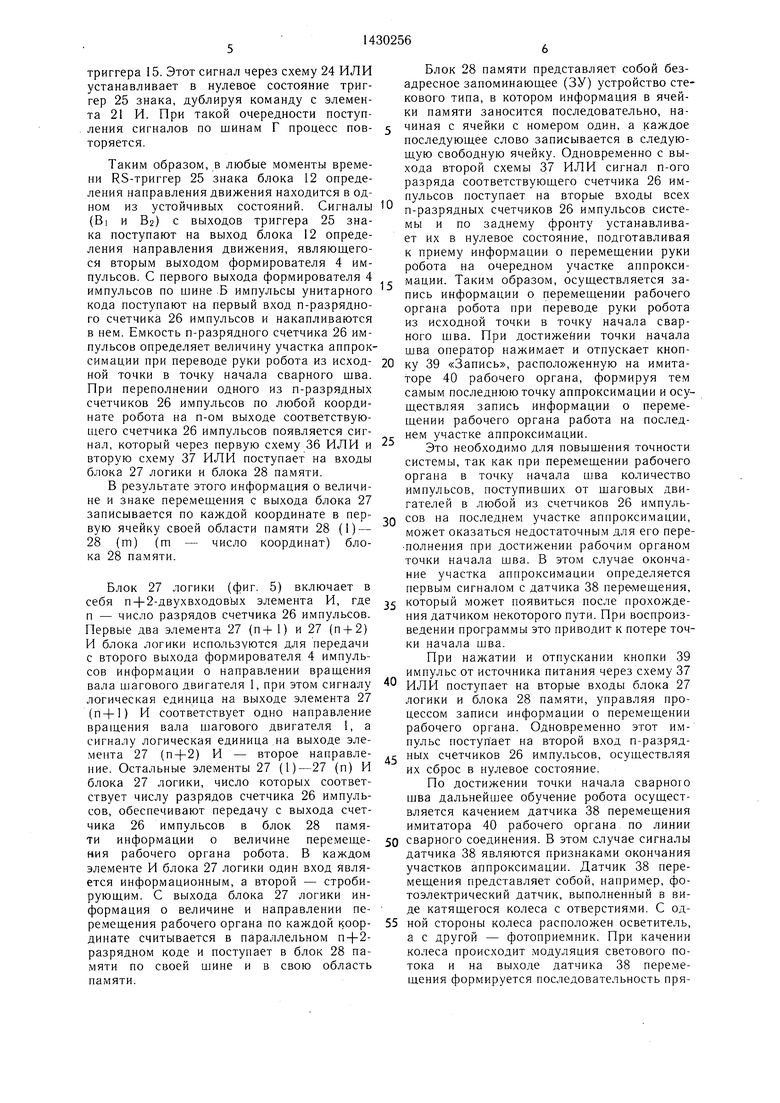
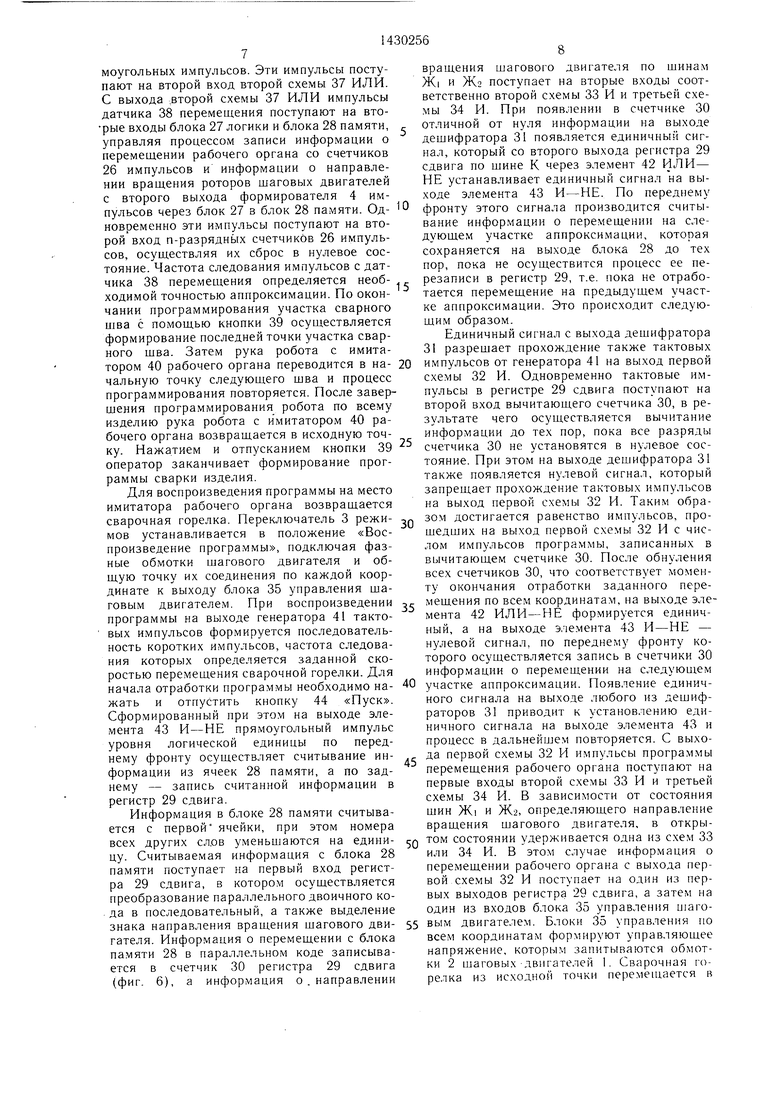
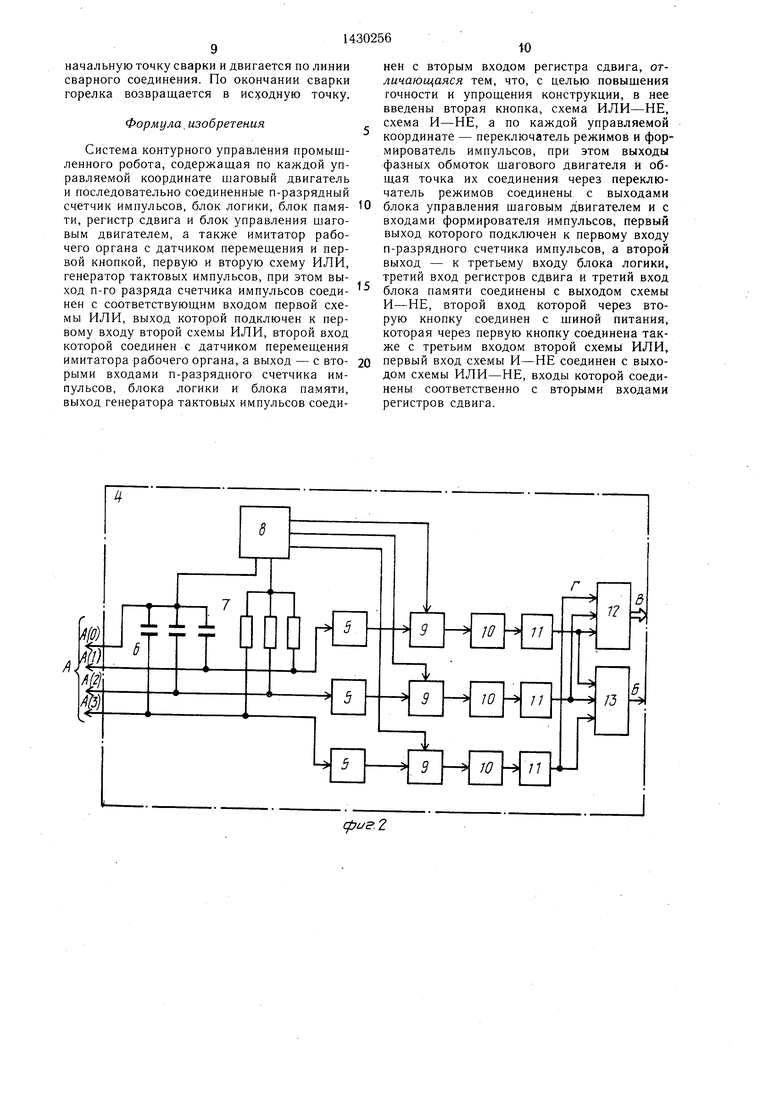
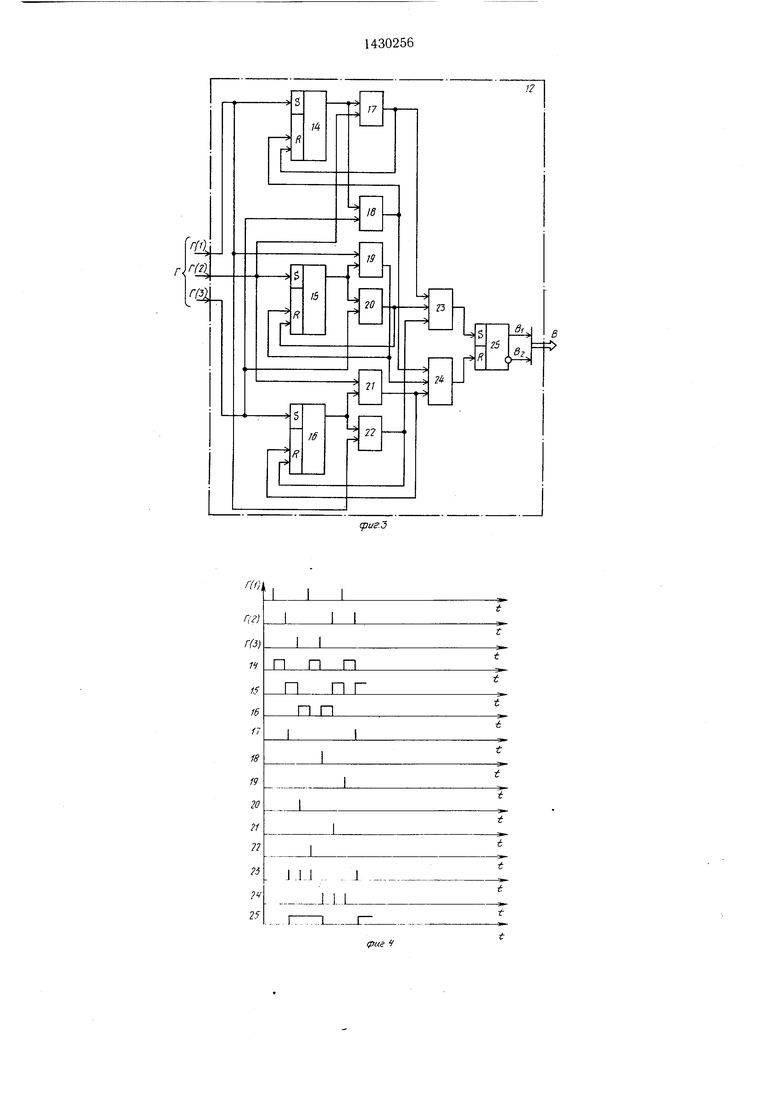
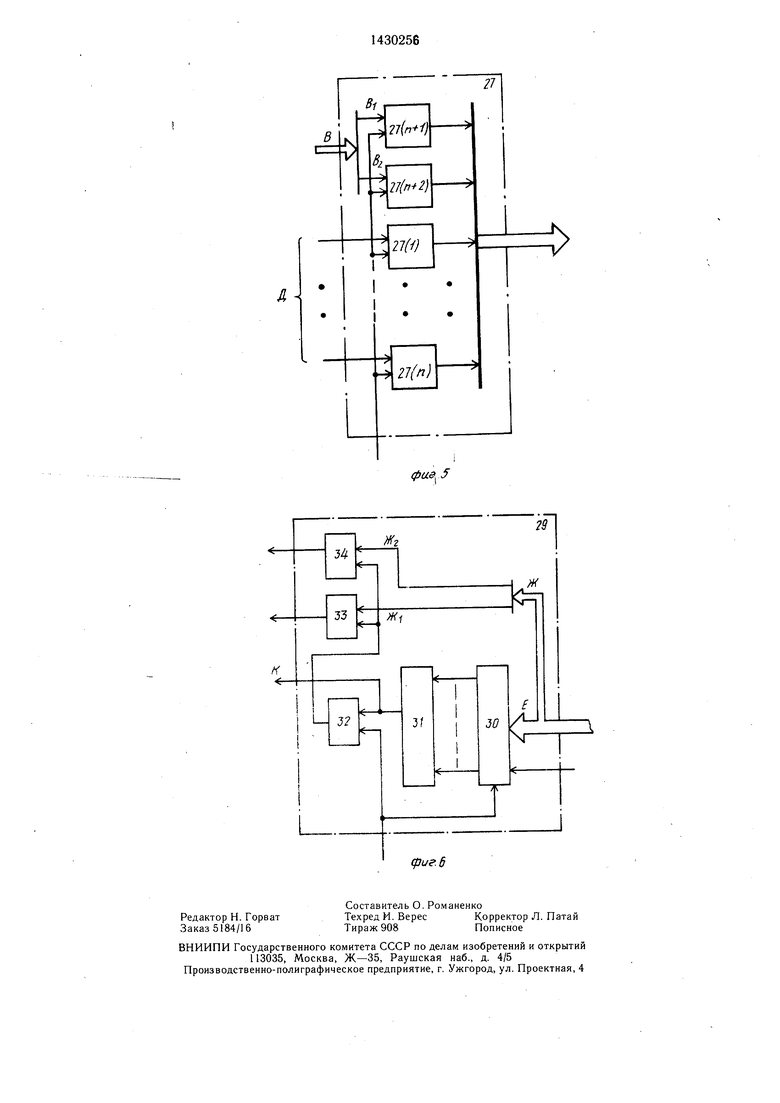
На фиг. I приведена функциональная схема системы; на фиг. 2 - функциональная схема формирователя импульсов; на фиг. 3 - функциональная схема блока определения направления движения; на фиг. 4 - эпюры напряжений блока определения направления движения; на фиг. 5 - функциональная схема блока логики; на фиг. 6 - функциональная схема регистра сдвига.
Система содержит шаговый двигатель 1, фазные обмотки 2 которого и общая точка их соединения через переключатель 3 режимов подключены к входам формирователя 4 импульсов. Входы формирователя 4 импульсов (шина А(1)-А(3) являются входами усилителей 5 (фиг. 2). К входам усилителей 5 подключены конденсаторы 6 и резисторы 7. Общая точка соединения конденсаторов 6 через переключатель режимов 3 соединена по шине А(0) с общей точкой соединения обмоток 2 шагового двигателя, в результате чего обмотки 2 шагового двигателя и конденсаторы 6 по каждой фазе включены параллельно. Общая точка соединения конденсаторов 6 и резисторов 7 подключена к первым выходам генератора 8 опорной частоты. Выходы усилителей 5 соединены с первыми входами демодуляторов 9, вторые входы которых подключены к вторым выходам генератора 8 опорной частоты. Вы- ходы демодуляторов 9 связаны с входами пороговых устройств 10, выходы которых через дифференцирующие цепочки 11 подсоединены к входам блока 12 определения направления движения и к входам схемы 13 ИЛИ. Выход схемы 13 ИЛИ является первым информационным выходом формирователя 4 импульсов (шина Б). Блок 12 определения направления движения содержит RS-триггеры 14-16 входных сигналов, элементы 17-22 И, элементы 23, 24 ИЛИ, RS-триггер 25 знака. Входы блока 12 шины Г(1) - Г(3) являются входами RS-триггеров 14-16. Выходы RS-триггера 25 знака Bi и В2 являются выходом блока 12 определения направления движения и вторым выходом формирователя 4 импульсов (ши- на В). Первый выход формирователя 4 импульсов (щина Б) соединен с первым входом п-разрядного счетчика 26 импульсов. Выходы п-разрядного счетчика 26 импуль
5
5
0
0
0 5
0
5
5
0
сов (щина Д) соединены с первыми входами блока логики 27, с третьим входом которого соединен второй выход формирователя импульсов 4. Выход блока логики 27, представляющий собой п информационных и два знаковых разряда, через блок 28 памяти соединен с первым входом регистра 29 сдвига. Информационные разряды по щине Е в регистре 29 сдвига соединены с первыми входами вычитающего счетчика 30, выходы которого соединены с входами дешифратора 31, выход которого соединен с первьш входом первой схемы 32 И. Выход первой схемы 32 И подключен к первым входам второй схемы 33 И и третьей схемы 34 И. Вторые входы второй схемы 33 И(Ж|) и третьей схемы 34 И (Ж2) подключены по шине Ж к знаковым разрядам первого входа регистра 29. Выходы второй и третьей схем 33 и 34 И являются первыми выходами регистра 29 сдвига и подключены к входам блока 35 управления шаговым двигателем. Второй вход первой схемы 32 И и второй вход вычитающего счетчика 30 соединены с вторым входом регистра 29 сдвига. Третий вход счетчика 30 является третьим входом регистра 29.
Выходы блока 35 управления щаговым двигателем через переключатель 3 режимов соединены с фазными обмотками 2 и общей точкой их соединения шагового двигателя 1. Выход п-ого разряда счетчика 26 импульсов соединен с соответствующим входом первой схемы 36 ИЛИ, выход которой подключен к первому входу второй схемы 37 ИЛИ. Второй и третий входы схемы 37 ИЛИ соединены соответственно с выходом датчика 38 перемещения и вторым выводом нормально разомкнутого контакта кнопки 39 «Запись имитатора 40 рабочего органа. Выход схемы 37 ИЛИ соединен с вторыми входами счетчика 26 и блока логики 27. Вторые входы регистров 29 соединены с выходом генератора 41 тактовых импульсов, а вторые выходы регистров 29 - по шине К с входами элемента 42 ИЛИ-НЕ, выход которого соединен с первым входом элемента 43 И-НЕ. Выход элемента 43 соединен с третьими входами блока 28 и регистра 29 сдвига. Второй вход элемента 43 соединен через нормально замкнутые контакты кнопки 44 «Пуск с одним из. выводов источника питания, который соединен также с первым выводом кнопки 39.
Система работает следующим образом.
При включении питания входящие в систему RS-триггеры 14-16 блока 12 определения направления движения, п-рлзрядный счетчик 26 импульсов, блок 28 памяти, регистр 29 сдвига устанавливаются в нулевое (исходное) состояние (схемы установки в исходное состояние условно не показаны). При этом RS-триггер 25 знака блока 12 определения направления движения может надвух состояний:
10
15
ходиться в одном из единичном или нулевом.
Перед началом программирования робота, рука которого находится в исходной точке, сварочная горелка заменяется имитатором 40 рабочего органа с датчиком 38 перемещения, а переключатель 3 режимов устанавливается в положение «Запись программы. При этом обмотки 2 шагового двигателя 1 по входным шинам А формирователя 4 импульсов подключаются параллельно конденсаторам б формирователя 4 импульсов, образуя по каждой фазе шагового двигателя параллельный контур. Так как об- ш,ая точка соединения конденсаторов 6 и обмоток 2 шагового двигателя всех контуров подключена непосредственно к одному из первых выходов генератора 8 опорной частоты, а точки соединения отдельных контуров с входными шинами А подключены к второму из первых выходов генератора 8 опорной частоты через резисторы 7, то они запитываются напряжением синусоидальной формы. При этом контуры настраиваются в резонанс на частоту питающего напряжения.
При переводе руки
его программирования из исходной точки в точку начала сварного шва начинают вращаться роторы шаговых двигателей 1. Наличие зубцов на роторе шагового двигателя приводит к тому, что при его вращении изменяются реактивные сопротивления обмоток 2 шагового двигателя в последовательности, зависящей от направления вращения ротора. Это приводит к тому, что на выходе контуров формируются ампли- тудно-модулированные сигналы, частота огибающих которых пропорциональна скорости вращения ротора шагового двигателя. Частота сигнала синусоидальной формы генератора 8 опорной частоты выбирается на порядок выше максимальной частоты огибающей амплитудно-модулированного сигнала на выходе контуров. С выхода контуров амплитудно-модулированные сигналы поступают на вход усилителей 5, а после усиления - на первые входы демодуляторов 9. На вторые входы демодуляторов 9 поступает напряжение синусоидальной формы со вторых выходов генератора 8 опорной частоты, которые служат в качестве опорного для двухполупериодного выделения огибающей амплитудно-модулированного сигнала. Напряжение огибающей ампли- устанавливается в единичное состояние
тудно-модулированных сигналов с выхода :) ., „.„„„,,„„„ ,.
демодуляторов 9 поступает на входы пороговых устройств 10. В качестве пороговых устройств используются триггера Шмидта, величина порога срабатывания которых выбирается из условия получения на выходе последних симметричных прямоугольных импульсов. Настройка триггеров Шмидта производится таким образом, чтобы порог их срабатывания был численно равен постоянной составляющей выходного сигнала демодулятора 9 и выбирается для каждого триггера при настройке в зависимости от сигнала огибающей амплитудно-модулированного сигнала.
Сформированные на выходах триггеров 10 Шмидта три последовательности симметричных прямоугольных импульсов, сдвинутых друг относительно друга на 120 эл. град., дифференцируются цепочками 11 и в виде коротких импульсов положительной полярности поступают на входы схемы 13 ИЛИ, а по щинам Г - на входы блока 12 определения направления движения. С выхода схемы 13 ИЛИ последовательность импульсов унитарного кода поступает по шине Б на первый выход формирователя 4 импульсов.
Блок 12 определения направления движения работает следующим образом.
При поступлении с выхода дифферен20 цирующей цепочки 11 по шине Г (1) первого входного сигнала (фиг. 3 и 4) по S-входу RS-триггер 14 устанавливается в единичное состояние и подготавливает к открытию элементы 17 и 18 И. При по- ступлении по шине Г (2) второго входного
робота в процессе 25 сигнала по S-входу RS-триггер 15 устанавливается в единичное состояние и подготавливает к открытию элементы 19, 20 И, а сигнал с выхода элемента 17 И устанавливает по R-входу в нулевое состояние RS-триг2Q гер 14 и через элемент 23 ИЛИ поступает на S-вход RS-триггера 25 знака. При поступлении по шине Г (3) третьего входного сигнала по З-входу RS-триггер 16 устанавливается в единичное состояние и подготавливает к открытию элементы 21 и 22 И,
с а сигнал с выхода элемента 20 И устанавливает по R-входу в нулевое состояние RS-триггер 15 и через схему 23 ИЛИ поступает на S-вход RS-триггера 25 знака, дублируя ко.манду с элемента 17 И. Далее при такой очередности поступления входных сиг40 налов по шине Г процесс повторяется.
Если входные сигналы по шинам Г поступают в обратной последовательности, что соответствует вращению роторов шаговых двигателей в другом направлении, то сигнал, поступающий по шине Г (3) после первого входного сигнала Г (1), через элементы 18 и 24 по R-входу устанавливает триггеры 14 и 25 в нулевое состояние. При поступлении по шине Г (2) второго входного сигнала RS-триггер 15 по S-входу
и
подготавливает к открыванию элементы 19 и 20 И, а сигнал с элемента 21 И устанавливает по R-входу в нулевое состояние триггер 16 и через элемент 24 ИЛИ - триггер 25. При поступлении по шине Г (I)
55 первого входного сигнала триггер 14 по S-входу устанавливается в единичное состояние и подготавливает к открыванию элементы 17 и 18 И, а элемент 19 И выдает сигнал на сброс в нулевое состояние
45
триггера 15. Этот сигнал через схему 24 ИЛИ устанавливает в нулевое состояние триггер 25 знака, дублируя команду с элемента 21 И. При такой очередности поступления сигналов по шинам Г процесс повторяется.
Таким образом, в любые моменты времени RS-триггер 25 знака блока 12 определения направления движения находится в одном из устойчивых состояний. Сигналы (В| и В2) с выходов триггера 25 знака поступают на выход блока 12 определения направления движения, являющегося вторым выходом формирователя 4 импульсов. С первого выхода формирователя 4 импульсов по шине Б импульсы унитарного кода поступают на первый вход п-разрядно- го счетчика 26 импульсов и накапливаются в нем. Емкость п-разрядного счетчика 26 импульсов определяет величину участка аппроксимации при переводе руки робота из исходной точки в точку начала сварного шва. При переполнении одного из п-разрядных счетчиков 26 импульсов по любой координате робота на п-ом выходе соответствующего счетчика 26 импульсов появляется сигнал, который через первую схему 36 ИЛИ и вторую схему 37 ИЛИ поступает на входы блока 27 логики и блока 28 памяти.
В результате этого информация о величине и знаке перемещения с выхода блока 27 записывается по каждой координате в первую ячейку своей области памяти 28 (1) - 28 (т) (т - число координат) блока 28 памяти.
Блок 27 логики (фиг. 5) включает в себя п + 2-двухвходовЬ х элемента И, где п - число разрядов счетчика 26 импульсов. Первые два элемента 27 (n-f 1) и 27 (п + 2) И блока логики используются для передачи с второго выхода формирователя 4 импульсов информации о направлении врашения вала шагового двигателя 1, при этом сигналу логическая единица на выходе элемента 27 (n + l) И соответствует одно направление вращения вала шагового двигателя 1, а сигналу логическая единица .на выходе элемента 27 (п+2) И - второе направление. Остальные элементы 27 (1)-27 (п) И блока 27 логики, число которых соответствует числу разрядов счетчика 26 импульсов, обеспечивают передачу с выхода счетчика 26 импульсов в блок 28 памяти информации о величине перемещения рабочего органа робота. В каждом элементе И блока 27 логики один вход является информационным, а второй - строби- рующим. С выхода блока 27 логики информация о величине и направлении перемещения рабочего органа по каждой координате считывается в параллельном п+2- разрядном коде и поступает в блок 28 памяти по своей шине и в свою область памяти.
Блок 28 памяти представляет собой безадресное запоминающее (ЗУ) устройство стекового типа, в котором информация в ячейки памяти заносится последовательно, начиная с ячейки с номером один, а каждое последующее слово записывается в следующую свободную ячейку. Одновременно с выхода второй схемы 37 ИЛИ сигнал п-ого разряда соответствующего счетчика 26 импульсов поступает на вторые входы всех п-разрядных счетчиков 26 импульсов системы и по заднему фронту устанавливает их в нулевое состояние, подготавливая к приему информации о перемещении руки робота на очередном участке аппроксиc мации. Таким образом, осуществляется запись информации о перемещении рабочего органа робота при переводе руки робота из исходной точки в точку начала сварного щва. При достижении точки начала шва оператор нажимает и отпускает кноп0 ку 39 «Запись, расположенную на имитаторе 40 рабочего органа, формируя тем самым последнюю точку аппроксимации и осуществляя запись информации о перемещении рабочего органа работа на послед нем участке аппроксимации.
Это необходимо для повышения точности системы, так как при перемешении рабочего органа в точку начала шва количество импульсов, поступивших от шаговых двигателей в любой из счетчиков 26 импуль0 сов на последнем участке аппроксимации, может оказаться недостаточны.м для его пере- полнения при достижении рабочим органом точки начала шва. В этом случае окончание участка аппроксимации определяется первым сигналом с датчика 38 пере-мещенин,
5 который может появиться после прохождения датчиком некоторого пути. При воспроизведении программы это приводит к потере точки начала шва.
При нажатии и отпускании кнопки 39 импульс от источника питания через схему 37
ИЛИ поступает на вторые входы блока 27 логики и блока 28 памяти, управляя процессом записи информации о перемещении рабочего органа. Одновременно этот импульс поступает на второй вход п-разрядг ных счетчиков 26 импульсов, осуществляя их сброс в нулевое состояние.
По достижении точки начала сварного шва дальнейшее обучение робота осуществляется качением датчика 38 перемещения имитатора 40 рабочего органа по линии
0 сварного соединения. В этом случае сигналы датчика 38 являются признаками окончания участков аппроксимации. Датчик 38 перемещения представляет собой, например, фотоэлектрический датчик, выполненный в виде катящегося колеса с отверстиями. С од5 ной стороны колеса расположен осветитель, а с другой - фотоприемник. При качении колеса происходит модуляция светового потока и на выходе датчика 38 перемещения формируется последовательность прямоугольных импульсов. Эти импульсы поступают на второй вход второй схемы 37 ИЛИ. С выхода .второй схемы 37 ИЛИ импульсы датчика 38 перемещения поступают на вто- рые входы блока 27 логики и блока 28 памяти, управляя процессом записи информации о перемещении рабочего органа со счетчиков 26 импульсов и информации о направлении вращения роторов щаговых двигателей с второго выхода формирователя 4 имвращения шагового двигателя по шинам Ж| и Ж2 поступает на вторые входы соответственно второй схемы 33 И и третьей схемы 34 И. При появлении в счетчике 30 отличной от нуля информации на выходе дешифратора 31 появляется единичный сигнал, который со второго выхода регистра 29 сдвига по шине К через элемент 42 ИЛИ- НЕ устанавливает единичный сигнал на выходе элемента 43 И-НЕ. По переднему
тается перемещение на предыдущем участке аппроксимации. Это происходит следующим образом.
Единичный сигнал с выхода дешифратора 31 разрешает прохождение также тактовых
пульсы в регистре 29 сдвига поступают на второй вход вычитающего счетчика 30, в результате чего осуществляется вычитание информации до тех пор, пока все разряды
также появляется нулевой сигнал, который запрещает прохождение тактовых импульсов на выход первой схемы 32 И. Таким обрапульсов через блок 27 в блок 28 памяти. Од- фронту этого сигнала производится считыновременно эти импульсы поступают на вто-ванне информации о перемещении на слерой вход п-разрядных счетчиков 26 импуль-дующем участке аппрокси.мации, которая
сов, осуществляя их сброс в нулевое сое-сохраняется на выходе блока 28 до тех
тояние. Частота следования импульсов с дат-пор, пока не осуществится процесс ее печика 38 перемещения определяется необ- .резаписи в регистр 29, т.е. пока не отрабоХОДИМОЙ точностью аппроксимации. По окон-т от- а r,or,e,o,,raut,o uo г,..,,,,a.
чании программирования участка сварного шва с помощью кнопки 39 осуществляется формирование последней точки участка сварного шва. Затем рука робота с имитатором 40 рабочего органа переводится в на- 20импульсов от генератора 41 на выход первой чальную точку следующего щва и процесссхемы 32 И. Одновременно тактовые им- программирования повторяется. После завершения программирования робота по всему изделию рука робота с имитатором 40 рабочего органа возвращается в исходную точ-Т-. -- - г.Г--Г-- ку. Нажатием и отпусканием кнопки 39 счетчика 30 не установятся в нулевое сосоператор заканчивает формирование прог-тояние. При этом на выходе дешифратора 31 раммы сварки изделия.
Для воспроизведения программы на место имитатора рабочего органа возвращается
сварочная горелка. Переключатель 3 режи- зом достигается равенство импульсов, промов устанавливается в положение «Вое-шедших на выход первой схемы 32 И с чиспроизведепие программы, подключая фаз-лом импульсов программы, записанных в
ные обмотки шагового двигателя и об-вычитающем счетчике 30. После обнуления
щую точку их соединения по каждой коор-всех счетчиков 30, что соответствует момендинате к выходу блока 35 управления ша-ту окончания отработки заданного переговым двигателем. При воспроизведении гмещения по всем координатам, на выходе эленрограммы на выходе генератора 41 такто-мента 42 ИЛИ-НЕ формируется единич вых импульсов формируется последователь-ный, а на выходе элемента 43 И-НЕ -
ность коротких импульсов, частота следова-нулевой сигнал, по переднему фронту кония которых определяется заданной ско-торого осуществляется запись в счетчики 30
ростью перемещения сварочной горелки. Дляинформации о перемещении на следующем
начала отработки программы необходимо на- 40участке аппроксимации. Появление единичжать и отпустить кнопку 44 «Пуск.ного сигнала на выходе любого из дещифСформированный при этом на выходе эле-раторов 31 приводит к установлению едимента 43 И-НЕ прямоугольный импульсничного сигнала на выходе элемента 43 и
уровня логической единицы по перед-процесс в дальнейшем повторяется. С выхонему фронту осуществляет считывание ин- ,да первой схемы 32 И импульсы программы
формации из ячеек 28 памяти, а по зад-г,г.а.,.„,о,,„с, кг.,,, „,, „..-,,г. ,,о нему - запись считанной информации в регистр 29 сдвига.
Информация в блоке 28 памяти считывается с первой ячейки, при этом номера
всех других сл.ов уменьшаются на едини- состоянии удерживается одна из схем 33
цу. Считываемая информация с блока 28или 34 И. В этом случае информация о
перемещении рабочего органа с выхода первой схемы 32 И поступает на один из первых выходов регистра 29 сдвига, а затем на один из входов блока 35 управления шагознака направления вращения щагового дви- 55вым двигателем. Блоки 35 управления по
гателя. Информация о перемещении с блокавсем координатам формируют управляющее
памяти 28 в параллельном коде записыва-напряжение, которым запитываются обмотется в счетчик 30 регистра 29 сдвигаки 2 шаговых двигателей 1. Сварочная го(фиг. 6), а информация о . направлениирелка из исходной точки перемещается в
перемещения рабочего органа поступают на первые входы второй схемы 33 И и третьей схемы 34 И. В зависимости от состояния шин Ж и Ж2, определяющего направление вращения щагового двигателя, в открыпамяти поступает па первый вход регистра 29 сдвига, в котором осуществляется преобразование параллельного двоичного кода в последовательный, а также выделение
вращения шагового двигателя по шинам Ж| и Ж2 поступает на вторые входы соответственно второй схемы 33 И и третьей схемы 34 И. При появлении в счетчике 30 отличной от нуля информации на выходе дешифратора 31 появляется единичный сигнал, который со второго выхода регистра 29 сдвига по шине К через элемент 42 ИЛИ- НЕ устанавливает единичный сигнал на выходе элемента 43 И-НЕ. По переднему
фронту этого сигнала производится считытается перемещение на предыдущем участке аппроксимации. Это происходит следующим образом.
Единичный сигнал с выхода дешифратора 31 разрешает прохождение также тактовых
r,or,e,o,,raut,o uo г,..,,,,a.
импульсов от генератора 41 на выход первой схемы 32 И. Одновременно тактовые им- Т-. -- - г.Г--Г-- пульсы в регистре 29 сдвига поступают на второй вход вычитающего счетчика 30, в результате чего осуществляется вычитание информации до тех пор, пока все разряды
импульсов от генератора 41 на выход первой схемы 32 И. Одновременно тактовые им- Т-. -- - г.Г--Г-- счетчика 30 не установятся в нулевое состакже появляется нулевой сигнал, который запрещает прохождение тактовых импульсов на выход первой схемы 32 И. Таким обратояние. При этом на выходе дешифратора 31
да первой схемы 32 И импульсы программы
г,г.а.,.„,о,,„с, кг.,,, „,, „..-,,г. ,,о
перемещения рабочего органа поступают на первые входы второй схемы 33 И и третьей схемы 34 И. В зависимости от состояния шин Ж и Ж2, определяющего направление вращения щагового двигателя, в открыначальную точку сварки и двигается по линии сварного соединения. По окончании сварки горелка возвращается в иc} oднyю точку.
Формула, изобретения
нен с вторым входом регистра сдвига, отличающаяся тем, что, с целью повышения точности и упрощения конструкции, в нее введены вторая кнопка, схема ИЛИ-НЕ, схема И-НЕ, а по каждой управляемой координате - переключатель режимов и формирователь импульсов, при этом выходы фазных обмоток шагового двигателя и общая точка их соединения через переключатель режимов соединены с выходами
Система контурного управления промышленного робота, содержащая по каждой управляемой координате шаговый двигатель
и поглеловательно соединенные п-разрядный -,и.. j--- -
счетчГк импульсов, блок логики, блок памя- Ю блока управления шаговым двигателем и с
тиоегисто сдвига и блок управления шаго-входами формирователя импульсов, первый
ти, регистр сдвига и илик выход которого подключен к первому входу
п-разрядного счетчика импульсов, а второй выход - к третьему входу блока логики, третий вход регистров сдвига и третий вход блока памяти соединены с выходом схемы И-НЕ, второй вход которой через вторую кнопку соединен с шиной питания, которая через первую кнопку соединена таккоторой соединен с датчиком „ерем. же с третьим входом T«P°« ™ имитатора рабочего органа, а выход - с вто- 20 первый вход схемы И-НЕ соединеннее выхо ьши п-разрядного счетчика им- ДОм схемы ИЛИ-НЕ, , которой соеди пульсов блока логики и блока памяти, йены соответственно с вторыми входами выход генератора тактовых импульсов соеди- регистров сдвига.
irij .,1|.- --
вым двигателем, а также имитатор рабочего органа с датчиком перемещения и первой кнопкой, первую и вторую схему ИЛИ, генератор тактовых импульсов, при этом выход п-го разряда счетчика импульсов соединен с соответствующим входом первой схемы ИЛИ, выход которой подключен к первому входу второй схемы ИЛИ, второй вход которой соединен с датчиком перемещения
15
нен с вторым входом регистра сдвига, отличающаяся тем, что, с целью повышения точности и упрощения конструкции, в нее введены вторая кнопка, схема ИЛИ-НЕ, схема И-НЕ, а по каждой управляемой координате - переключатель режимов и формирователь импульсов, при этом выходы фазных обмоток шагового двигателя и общая точка их соединения через переключатель режимов соединены с выходами
-,и.. j--- -
блока управления шаговым двигателем и с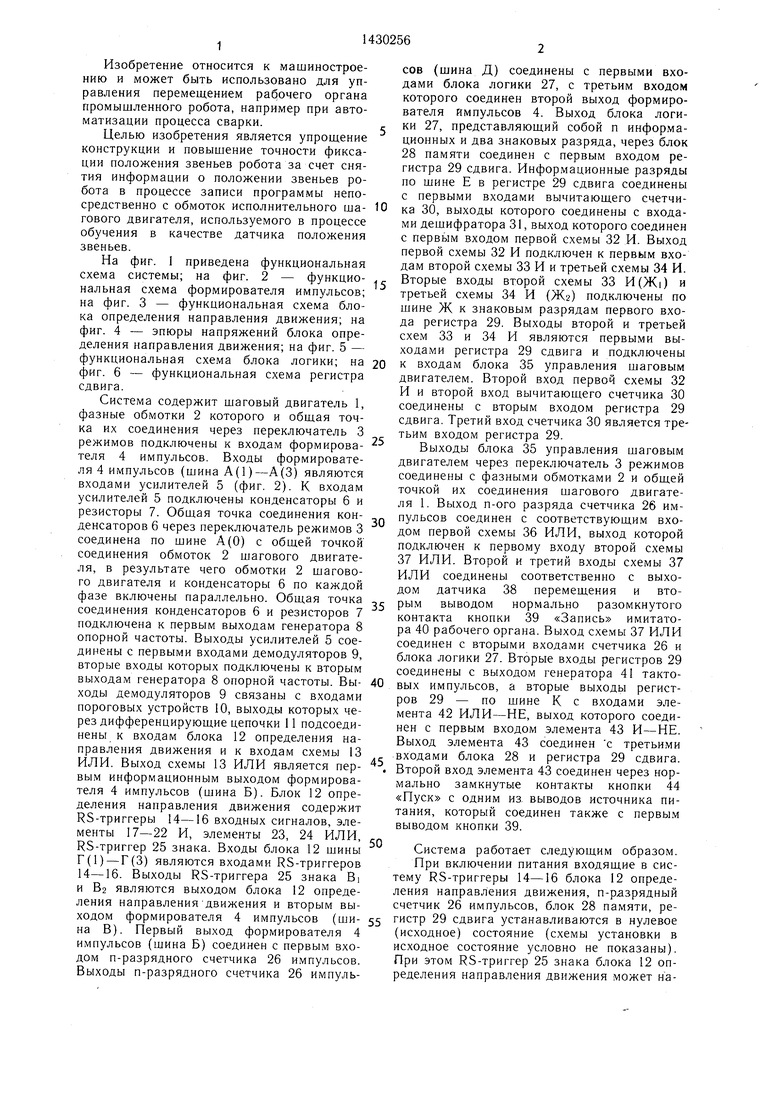
| название | год | авторы | номер документа |
|---|---|---|---|
| Позиционный дискретный электропривод | 1985 |
|
SU1352474A1 |
| Устройство для управления позиционированием в ноль исполнительных органов станка | 1988 |
|
SU1571549A1 |
| Устройство для измерения угла закручивания вращающегося вала | 1991 |
|
SU1795312A1 |
| Устройство для управления шаговым двигателем | 1989 |
|
SU1646036A2 |
| Устройство для суммирования двухиМпульСНыХ пОСлЕдОВАТЕльНОСТЕй | 1978 |
|
SU809179A1 |
| Многодвигательный электропривод переменного тока | 1985 |
|
SU1307521A1 |
| Устройство для автоматического направления электрода по стыку свариваемых деталей | 1984 |
|
SU1207678A1 |
| Устройство для записи и воспроиз-ВЕдЕНия пРОгРАММ | 1978 |
|
SU807238A1 |
| Устройство для управления шаговым двигателем | 1988 |
|
SU1647516A1 |
| Устройство для программного управления позиционного типа | 1983 |
|
SU1158976A1 |
Изобретение относится к области машиностроения и может быть использовано в системах управления промышленных роботов. Цель изобретения - упрощение конструкции и повышение точности. Система включает шаговый двигатель 1, п-разрядный -счетчик 26 импульсов, блок 27 логики, блок 28 памяти, регистр 29 сдвига, блок Э 5 управления шаговым двигателем, первую 36 и вторую 37 схемы ИЛИ, имитатор 40 рабочего органа с датчиком 38 перемешения и первой кнопкой 39, генератор 41 тактовых импульсов. Дополнительно в систему введены элемент ИЛИ-НЕ 42, элемент И-НЕ 43, вторая кнопка 44, а по каждой управляемой координате - переключатель 3 режимов и формирователь 4 импульсов. Введение перечисленных блоков и элементов позволяет при программировании робота производить считывание информации о положении звеньев манипулятора с обмоток исполнительного шагового двигателя. 6 ил. (Л 4: 00 О ю ел Oi
сриг.2
П П П
П П г
П П
J ... ., . 1
JJ...I
t
r
t T
-
гt
Т
t
-
Й
- Tf-
us ч
Л 4
| Developments in mechanised, automated and robotic welding | |||
| - London, November, 1980, p | |||
| Прибор для получения стереоскопических впечатлений от двух изображений различного масштаба | 1917 |
|
SU26A1 |
