IS rS 18 П 1 3 f °
СХ)
N
4
ел to
Изобретение относится к горному делу, в частности к передвижным крепям и может быть использовано для перемещения пнеимобаллопных крепей в горной промышленности.
Извсстеп способ передвижки шахтной крепи, в котором, с целью уменьшения сил трения при передвижке крепи, она снабжена вибратором направленного действия. Принцип передвижения этой крепи основан на снижении сил трения между основанием крепи и почвой пласта за счет колебаний, создаваемых вибратором. Перемещение крепи осуществляется за счет ее собственного веса и давления обрушенных пород 1.
Недостатком известного способа является то, что его можно использовать только при перемещении крепи по падению пласта, так как вибратор направленного действия создает импульсы в двух прямо противоположных направлениях и к крепи необходимо приложить дополнительные силы для ее перемещения.
Наиболее близким по технической сущности к предлагаемому является способ передвижки пневмобаллонной крепи, включаю щий создание распора оснований крепи с боковыми породами, раздельное перемещение оснований крепи вдоль почвы и кровли пласта посредством пневмодвигателя 2.
К недостаткам данного способа относятся необходимость полного подбучивания крепи перепускающимися породами для создапия усилий отпора баллонов принудительной передвижки. Кроме того, при углах налепи я угольпых пластов, меньщих 90°, направление сил отпора, создаваемых баллонами принудительной передвижки, отклоняется от направления перемещения основания крепи и эффективность передвижки снижается и баллоны принудительной передвижки подвержены непосредственно воздействию обрушенных пород.
Перечисленные недостатки снижают эффективность и надежность передвижки пневмобаллонной крепи.
Цель изобретения - обеспечение надежности передвижки крепи с активным подпором по востанию и падению пласта.
Поставленная цель достигается тем, что в способе передвижки пневмобаллонной крепи, включающем создание распора оснований крепи с боковыми породами, раздельное перемещение оснований крепи вдоль почвы и кровли пласта посредством пневмодвигателя, основаниям крепи по всей длине сообщают в направлении передвижения во времени ударные нагрузки с помощью ударных механизмов. При этом ударные нагрузки могут создаваться путем подачи сжатого воздуха в ударные механизмы от пневмобаллонов по группам последовательно от одного края крепи к другому по простиранию пласта.
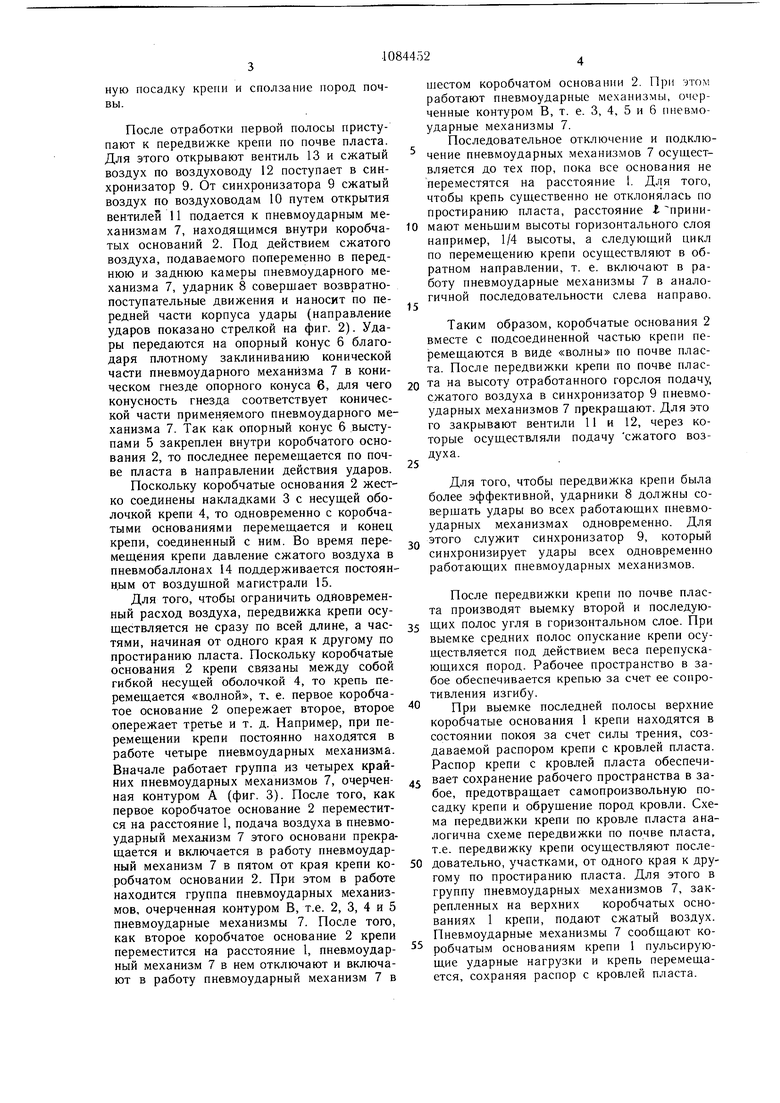
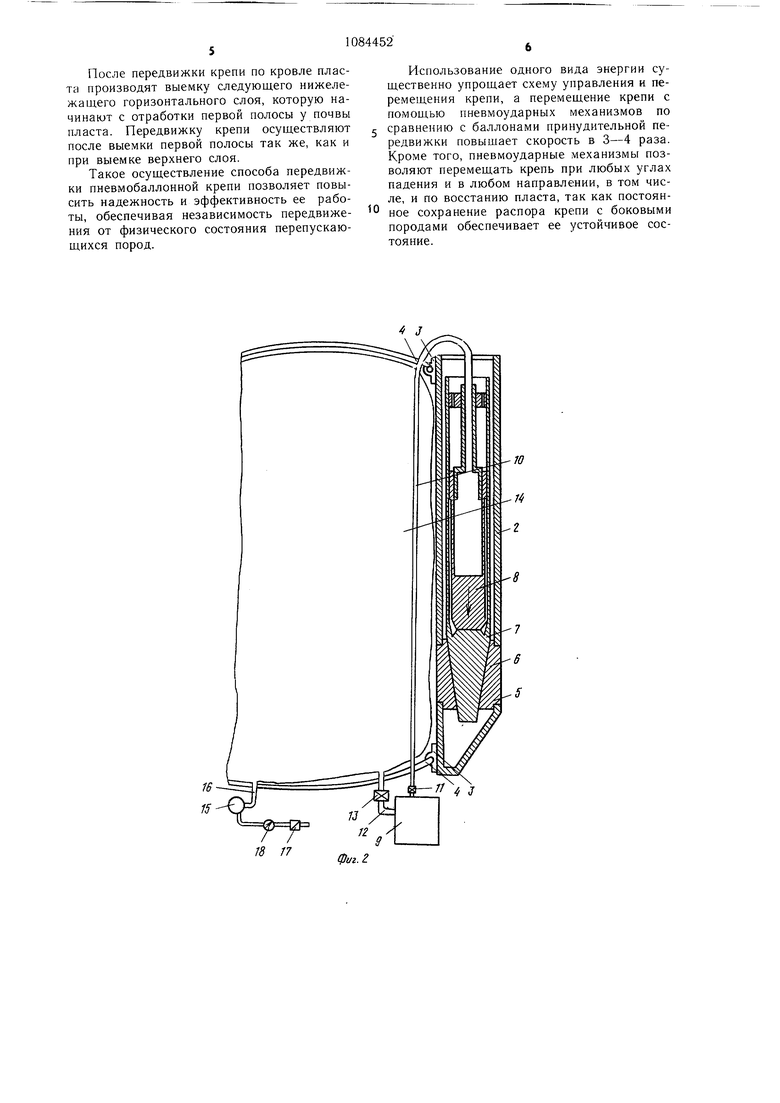
На фиг. 1 изображена пневмобаллонная крепь, общий вид; на фиг. 2 - устройство для передвижения крепи, поперечный разрез; на фиг. 3 - схема перемещения крепи
по простиранию пласта.
Устройство для передвижки пневмобаллонной крепи состоит из верхних (по кровле) 1 и нижних 2 (по почве) коробчатых оснований, жестко соединенных с помощью иакладок 3 с несущей оболочкой 4. В коробчатых основаниях 1 и 2 имеются прямоугольные отверстия, в которые выступами 5 закреплены опорные конусы 6. Опорные конусы 6 размещены внутри коробчатых оснований 1 и 2.
5 В центре опорных конусов 6 выполнены гнезда, в которые конической частью установлены пневмоударные механизмы 7.
Корпус пневмоударного механизма 7 представляет собой тонкостенный цилиндр, на одном из концов замкнутый на конус.
0 Внутри корпуса пневмоударного механизма размещен ударник 8, так что внутренняя полость пневмоударного механизма 7 разделяется на переднюю и заднюю камеры. Конусность гнезд в опорных конусах 6
соответствует конической части пневмоударных механизмов 7. Пневмоударные механизмы 7 соединены с синхронизатором 9 воздуховодами 10, которые снабжены вентилями 11 для подключения и отключения сжатого воздуха. Синхронизатор 9 соединен
0 воздуховодом 12, снабженным вентилем 13, с пневмобаллонами 14. Пневмобаллоны 14 подключены к воздушной магистрали 15 воздуховодами 16. Подача сжатого воздуха в Пневмобаллоны 14 регулируется вентилем 17 и контролируется манометром 18.
Устройство работает следующим образом Угольный пласт крутого падения отрабатывается системой горизонтальных слоев в нисходящем порядке с механизированной выемкой слоев узкими полосами по простиQ ранию. В исходном положении пневмобаллонная крепь лежит на почве горизонтального слоя и расперта за счет избыточного давления сжатого воздуха внутри пневмобаллонов 14 между кровлей и почвой угольного пласта. Давление сжатого воздуха в пневмо5 баллонах 14 поддерживается постоянным от воздущной магистрали 15 с помощью вентиля 17 и контролируется манометром 18.
Отработка первого или очередного горизонтального слоя начинается с выемки первой полосы от почвы по простиранию пласта. В период выемки первой полосы подработанная часть пневмобаллонной крепи находится в состоянии равновесия за счет ее распора с почвой пласта, создаваемого избыточным давлением воздуха внутри
5 пневмобаллонов 14. Создание распора крепи с почвой пласта обеспечивает устойчивое ее состояние, сохранение рабочего пространства в забое, предотвращает самопроизвольную посадку крепи и сползание пород почвы.
После отработки первой полосы приступают к передвижке крепи по почве пласта. Для этого открывают вентиль 13 и сжатый воздух по воздуховоду 12 поступает в синхронизатор 9. От синхронизатора 9 сжатый воздух по воздуховодам 10 путем открытия вентилей 11 подается к пневмоударным механизмам 7, находящимся внутри коробчатых оснований 2. Под действием сжатого воздуха, подаваемого попеременно в переднюю и заднюю камеры пневмоударного механизма 7, ударник 8 совершает возвратнопоступательные движения и наносит по передней части корпуса удары (направление ударов показано стрелкой на фиг. 2). Удары передаются на опорный конус 6 благодаря плотному заклиниванию конической части пневмоударного механизма 7 в коническом гнезде опорного конуса 6, для чего конусность гнезда соответствует конической части применяемого пневмоударного механизма 7. Так как опорный конус 6 выступами 5 закреплен внутри коробчатого основания 2, то последнее перемещается по почве пласта в направлении действия ударов.
Поскольку коробчатые основания 2 жестко соединены накладками 3 с несущей оболочкой крепи 4, то одновременно с коробчатыми основаниями перемещается и конец крепи, соединенный с ним. Во время перемещения крепи давление сжатого воздуха в пневмобаллонах 14 поддерживается постоянным от воздушной магистрали 15.
Для того, чтобы ограничить одновременный расход воздуха, передвижка крепи осуществляется не сразу по всей длине, а частями, начиная от одного края к другому по простиранию пласта. Поскольку коробчатые основания 2 крепи связаны между собой гибкой несущей оболочкой 4, то крепь перемещается «волной, т. е. первое коробчатое основание 2 опережает второе, второе опережает третье и т. д. Например, при перемещении крепи постоянно находятся в работе четыре пневмоударных механизма. Вначале работает группа из четырех крайних пневмоударных механизмов 7, очерченная контуром А (фиг. 3). После того, как первое коробчатое основание 2 переместится на расстояние 1, подача воздуха в пневмоударный механизм 7 этого основани прекращается и включается в работу пневмоударный механизм 7 в пятом от края крепи коробчатом основании 2. При этом в работе находится группа пневмоударных механизмов, очерченная контуром В, т.е. 2, 3, 4 и 5 пневмоударные механизмы 7. После того, как второе коробчатое основание 2 крепи переместится на расстояние 1, пневмоударный механизм 7 в нем отключают и включают в работу пневмоударный механизм 7 в
шестом коробчатом основанпи 2. При этом работают пневмоударные механизмы, очерченные контуром В, т. е. 3, 4, 5 и 6 пневмоударные механизмы 7.
Последовательное отключение и подключение пневмоударных механизмов 7 осуществляется до тех пор, пока все основания не переместятся на расстояние 1. Для того, чтобы крепь существенно не отклонялась по простиранию пласта, расстояние t прини0 мают меньшим высоты горизонтального слоя например, 1/4 высоты, а следующий цикл по перемещению крепи осуществляют в обратном направлении, т. е. включают в работу пневмоударные механизмы 7 в аналогичной последовательности слева направо.
Таким образом, коробчатые основания 2 вместе с подсоединенной частью крепи перемещаются в виде «волны по почве пласта. После передвижки крепи по почве плас0 та на высоту отработанного горслоя подачу, сжатого воздуха в синхронизатор 9 пневмоударных механизмов 7 прекращают. Для это го закрывают вентили 11 и 12, через которые осуществляли подачу сжатого воздуха.
5
Для того, чтобы передвижка крепи была более эффективной, ударники 8 должны соверщать удары во всех работающих пневмоударных механизмах одновременно. Для „ этого служит синхронизатор 9, который синхронизирует удары всех одновременно работающих пневмоударных механизмов.
После передвижки крепи по почве пласта производят выемку второй и последую5 щих полос угля в горизонтальном слое. При выемке средних полос опускание крепи осуществляется под действием веса перепускающихся пород. Рабочее пространство в забое обеспечивается крепью за счет ее сопротивления изгибу.
0
При выемке последней полосы верхние коробчатые основания 1 крепи находятся в состоянии покоя за счет силы трения, создаваемой распором крепи с кровлей пласта. Распор крепи с кровлей пласта обеспечивает сохранение рабочего пространства в забое, предотвращает самопроизвольную посадку крепи и обрущение пород кровли. Схема передвижки крепи по кровле пласта аналогична схеме передвижки по почве пласта, т.е. передвижку крепи осуществляют после0 довательно, участками, от одного края к другому по простиранию пласта. Для этого в группу пневмоударных механизмов 7, закрепленных на верхних коробчатых основаниях 1 крепи, подают сжатый воздух. Пневмоударные механизмы 7 сообщают ко робчатым основаниям крепи 1 пульсирующие ударные нагрузки и крепь перемещается, сохраняя распор с кровлей пласта.
После передвижки крепи по кровле пласта производят выемку следующего нижележащего горизонтального слоя, которую начинают с отработки первой полосы у почвы пласта. Передвижку крепи осуществляют после выемки первой полосы так же, как и при выемке верхнего слоя.
Такое осуществление способа передвижки пневмобаллонной крепи позволяет повысить надежность и эффективность ее работы, обеспечивая независимость передвижения от физического состояния перепускающихся пород.
Использование одного вида энергии существенно упрощает схему управления и перемещения крепи, а перемещение крепи с помощью пневмоударных механизмов по сравнению с баллонами принудительной передвижки повышает скорость в 3-4 раза. Кроме того, пневмоударные механизмы позволяют перемещать крепь при любых углах падения и в любом направлении, в том числе, и по восстанию пласта, так как постоянное сохранение распора крепи с боковыми породами обеспечивает ее устойчивое состояние.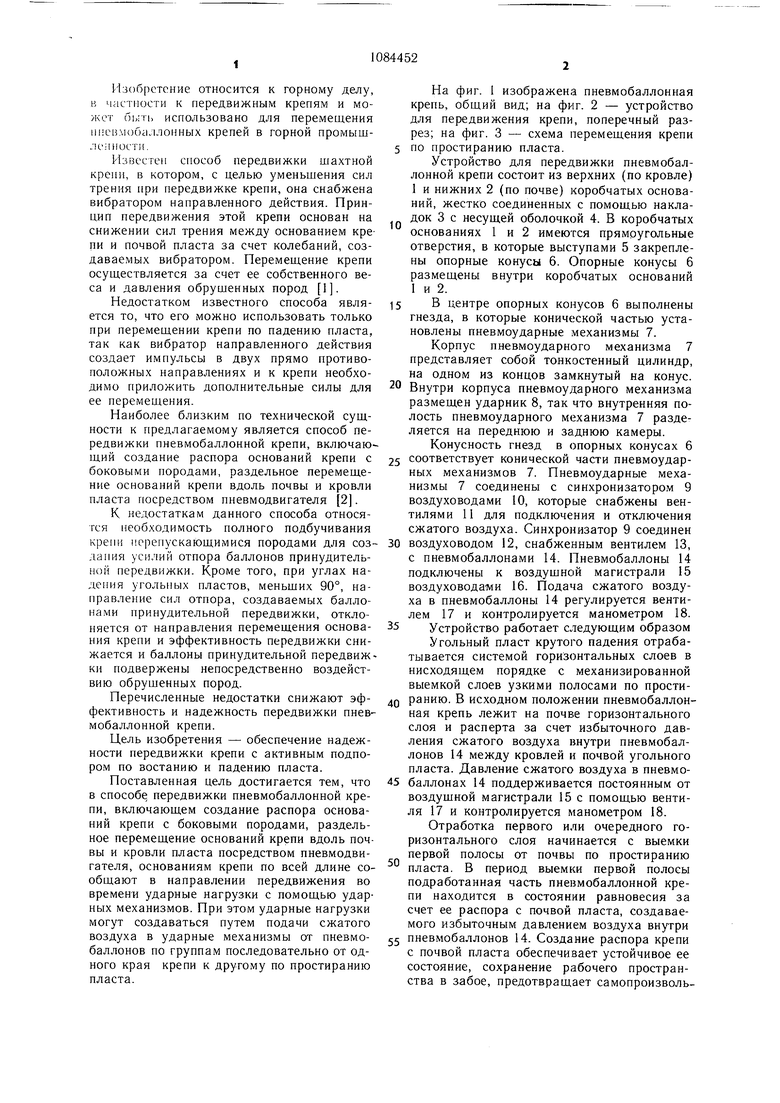
| название | год | авторы | номер документа |
|---|---|---|---|
| Безразгрузочная секция крепи | 1985 |
|
SU1318691A1 |
| Гибкая передвижная крепь | 1977 |
|
SU1036930A1 |
| Секция пневмобаллонной безразгрузочной крепи | 1985 |
|
SU1273588A1 |
| Механизированная пневматическая крепь | 1987 |
|
SU1506132A1 |
| СПОСОБ ОХРАНЫ ПОДГОТОВИТЕЛЬНЫХ ВЫРАБОТОК | 2009 |
|
RU2407892C1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ ДЛЯ КРУТЫХ ПЛАСТОВ | 2007 |
|
RU2357083C1 |
| Агрегат для выемки угля | 1976 |
|
SU588385A1 |
| Устройство для уплотнения закладочного массива | 1976 |
|
SU605034A1 |
| Механизированная пневмокрепь | 1982 |
|
SU1033761A1 |
| Агрегат для выемки угля | 1989 |
|
SU1721232A1 |
1. СПОСОБ ПЕРЕДВИЖКИ ПНЕВМОБАЛЛОННОЙ КРЕПИ, включающий создание распора основании крепи с боковыми породами, раздельное перемещение оснований крепи вдоль почвы и кровли пласта посредством пневмодвнгателя, отличающийся тем, что, с целью обеспечения надежности передвижки крепи с активным подпором по восстанию и падению пласта, основаниям крепи по всей длине сообщают в направлении передвижения во времени ударные нагрузки с помощью ударных механизмов. 2. Способ по п. 1, отличающийся тем, что ударные нагрузки создают путем подачи сжатого воздуха в ударные механизмы от пневмобаллонов по группам последовательно от одного края крепи к другому по простиранию пласта.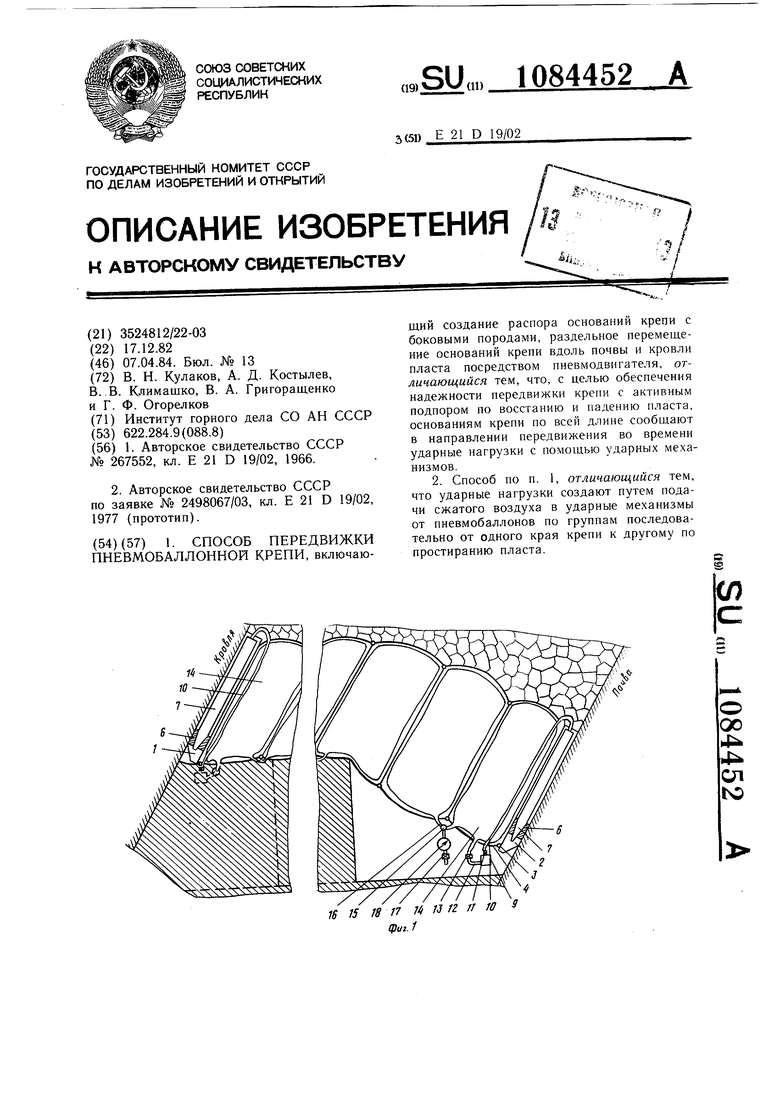
-Ю -Ц
г
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ПАТЕНТНО- ^1 пТ[.хкн«5{:с!;л5! ^'-^ЬИЬЛМ01Ё^.4 | 0 |
|
SU267552A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| СПОСОБ КОМПЛЕКСНОГО ОСВОЕНИЯ МЕСТОРОЖДЕНИЯ ЭНЕРГЕТИЧЕСКИХ УГЛЕЙ | 2012 |
|
RU2498067C1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
