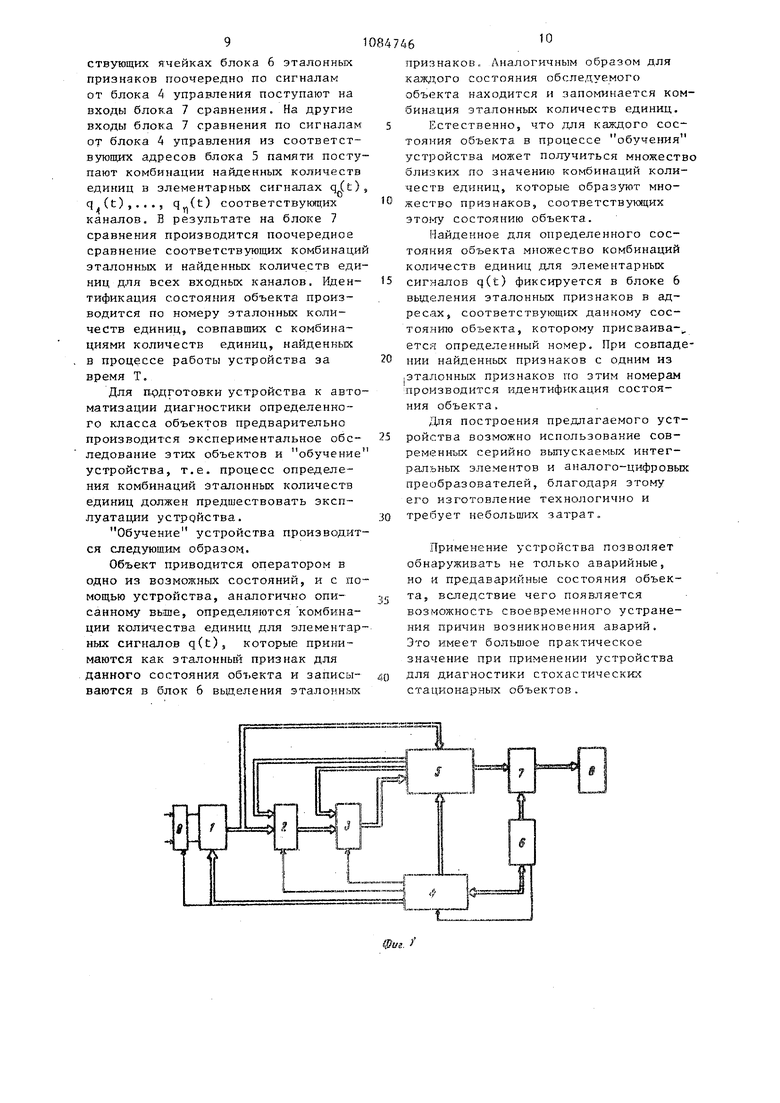
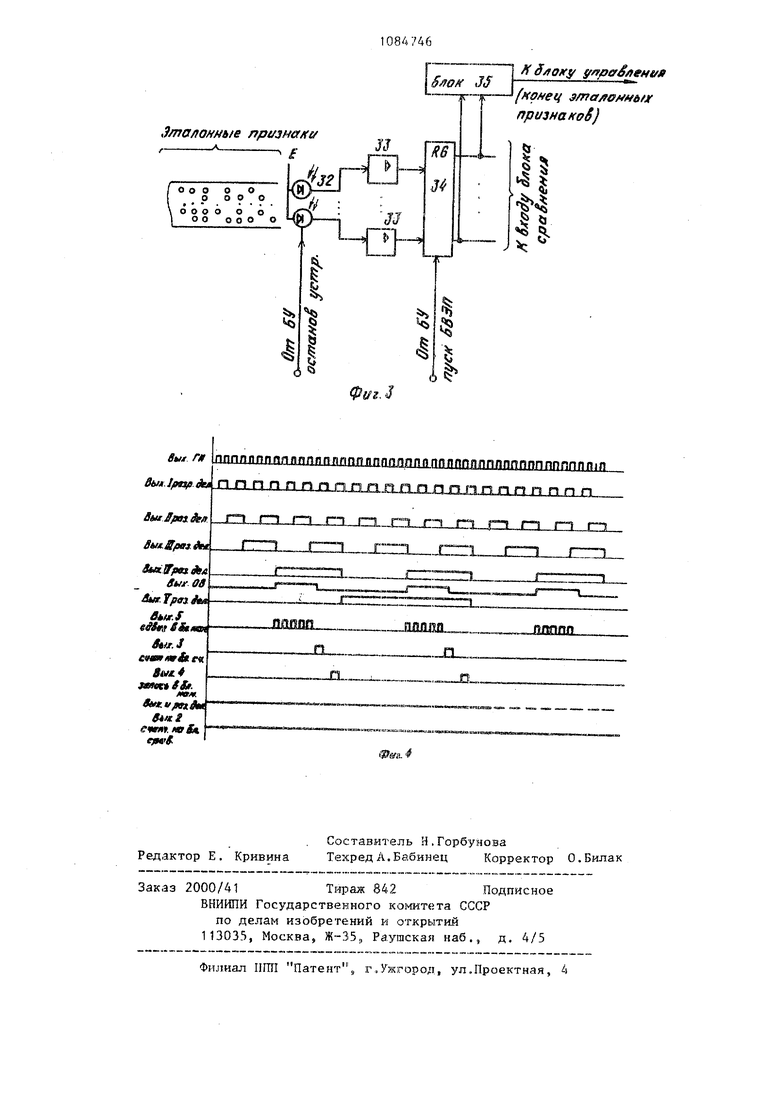
Изобретение относится к автоматике и вычислительной технике и пр назначено для диагностики состояний стационарных стохастических объект Известно устройство для акустической диагностики стационарных ст хастических объектов, содержащее датчик акустического сигнала, поло совой усилитель, стробатор, синхро низатор, датчик положения, измеритель амплитуды импульса, детектор, пороговое устройство, измеритель временного положения импульса, блок управления, усредняющее устройство решающее устройство, устройство выдачи результатов. В устройстве с помощью полосового фильтра из акустического сигнала вьщеляется та часть спектра, на которую приходится максимальная мощность составляющей от интересующей кинематической пары. Далее производится многократное измерение амплитуд акустического сигнала и определяется их положение относительно опорного сигнала от стробатора, результаты измерения усредняются. После этого в блоке масштабирования по заранее калиброванным значениям происходит анализ состояния кинематических пар. Таким образом, последовательно в устройстве вьщеляется сигнал одной пары, затем другой и т.д. и аналогично определяется состояние вьщеленной кинематической пары ll . Однако указанное устройство имеет узкую область примененияз так как с его помощью можно диагностировать состояния лишь тех объектов, у которьк периодичность процесса по торяется с определенной частотой и на выходе получаются периодичные сигналы. Наиболее близким по технической сущности к предлагаемому является устройство, содержащее входной преобразователь аналог-код, блок фильт рации сигналов и блок сравнения, входы которого соединены с выходами первого и второго блоков вьщеления эталонных признаков, а выходыс входами блока фиксации аварийных состояний первого и второго блоков выделения эталонных признаков и блока фильтрации сигналов, входы которого связаны с выходом преобразователя аналог-код, а выходы с входами блока контроля и блока формирования признаков аварии, второй выход которого подсоединен к входу второго блока выделения эталонных признаков. В устройстве от контролируемых сигналов стационарных объектов формируется два признака: по величине сигнала и по знаку производной. Далее эти сигналы сравниваются с эталонными признаками.При совпадении результатов формируется сигнал фиксации данной аварии 21 . Указанное устройство в процессе диагностирования позволяет обнаружить лишь аварийное состояние стационарньпс стохастических объектов, тогда как на практике гораздо важнее- в процессе эксплуатации определить все возможные предаварийные состояния объекта с целью своевременного устранения причин, которые могут привести к аварийным состояниям. I Цель изобретения - поньшение надежности устройства. Поставленная цель достигается тем, что в устройство для диагностики стационарных стохастических объектов, содержащее аналого-цифровой преобразователь, блок сравнения, соединенный первым входом с информационным выходом блока эталонных признаков, а выходом - с входом блока индикации, введены блок памяти, блок счетчиков импульсов, блок управления и регистр, подключенный первым информационным входом к выходу аналого-цифрового преобразователя и к первому информационному входу блока памяти5 вторым информационным входом - к первому информационному выходу блока памяти, а выходом к счетному входу блока счетчиков импульсов, связанного установочным входом с вторым информационным выходом блока памяти, а вьсходом - с вторым информационным входом блока памяти, подключенного выходом к второму входу блока сравнения, а первым и вторым управляюпщми входаГ4И соответственно к первому и второму выходам блока управления, соединенного управляющим входом с первым управлякмцим входом блока эталонных признаков, а третьим, четвертым, пятым, шестым, седьмым и восьмым выходами - соответственно с первым и вторым управляющими входами блока эталонных признаков, с управляющим входом блока счетчиков импульсов, управляющим входом регистра, первым и вторым управляющими входами аналого-цифрового преобразователя, подключенного информационными входами с выходом коммутатора, а управляющим выходом соответственно к информационным выходам и синхрони зирующему входу коммутатора,, связан ного управляющим входом с ВОСЬМЬ М (ВЫХОДОМ блока управления. На фиг. 1 показана блок-схема устройства; на фиг. 2 - схема блока управленияi на фиг. 3 - схема блока эталонных признаковJ на фиг. 4 - вр менная диаграмма блока управления. Устройство содержит аналого-цифровой преобразователь 1, регистр 2, блок 3 счетчиков импульсов, блок 4 управления, блок 5 памяти, блок 6 (вьщеления) эталонных признаков, блок 7 сравнения, блок 8 индикации, коммутатор 9. Блок 4 управления содержит генератор 10 импульсов, элемент ИЛИ 1 V, элементы И 12-17, одновибратор 18 с выходом 19, первый R5 -триггер 20 делитель 21 частоты, вторые триггеры 22-28, переключатель 29, кнопки 30 Останов, 31 Пуск. Блок 6 (вьщеления) эталонных при наков содержит фотодиоды 32, усилители ЗЗ регистр 34 памяти, блок 3 совпадения. Устройство работает следующим образом. До начала работы устройства его основные блоки приводятся в исходное состояние, т.е. устройство подг тавливается к очередной работе. В качестве технического средства в устройстве применена кнопка общего сброса. При нажатии указанной кнопки сигнал, полученный с ее выхода, устанавливает в нулевое состояние регистр 2, блок 3 счетчиков, блок 5 памяти, при этом лампы, находящиеся в блоке 8 индикации, принимают начальное состояние. После этого устройство готово к очередной работе, и с помощью кнопки пуска запускается. При нажатии кнопки Пуск в блоке управления запускается генератор импульсов. На восьмом выходе блока управления от указанной кнопки передается сигнал, который запус кает аналого-цифровой преобразователь (АЦП) 1 и одновременно с ним устанавливает в единичное состояние триггер 20. Импульсы с выхода генератора 10 импульсов поступают на вход делителя 21 частоты. Как видно из схемы логические элементы И, ИЛИ,соединенные, на входах делителя 21 частоты, позволяют формировать в блоке управления управляющие сигналы для синхронной работы устройства. При появлении сигнала на втором выходе делителя частоты запускается одновибратор 18. Б этот момент времени на выходе одновибратора 18 появляется разрешающий уровень напряжения, которьш поступает на один вход элемента И 14, на другой вход которого поступают импульсы с вькода генератора 10 импульсов.. Время, в.котором одновибратор 18 остается в единичном состоянии, выбирается с помощью времязадающей цепочки одновибратора С R-C. Время i) выбирается таким, чтобы через элемент И 14 проходило пять импульсов ГИ 10, которые с пятого выхода блока управления передаются на сдвигающий вход блока памяти. При появлении на входе делителя частоты тринадцатого импульса с ГИ 10 на седьмом, шестом и втором вькодах делителя 21 частоты появляется сигнал (1101), т.е. на входах элемента Pi 16 происходит совпадение этих сигналов, а сигнал с его выхода передается на первый вход элемента И 13 на второй вход которого поступает разрешакяций потенциал от триггера 20. Сигнал с выхода элемента 13 передается на шестой выход блока управления, который в устройстве производит считывание с блока 5 памяти информации в блок 3 счетчиков и регистр 2 (фиг. 1). Далее с приходом пятнадцатого импульса с выхода ГИ 10 на вход делителя частоты на выходах седьмого, первого, шестого и второго разрядах (1111) последнего появляются сигналы. На входах элемента И 17 происхо-дит совпадение этих сигналов, а сиг нал с его выхода передается с второго выхода блока управления на вход устройства, производя запись содержимых блока 3 счетчиков и регистра 2 в блок 5 памяти. Переключатель 29, подключенный к старшим разрядам делителя частоты необходим для изменения времени (Т) С. помощью переключателя можно установить время (Т)f которое необходим для осуществления анализа состояний диагностируемого объекта. При появлении на выходе переключателя 29 сигнала триггер 20 устанавливается в нулевое состояние. В этот момент времени с прямого выхода триггера 20 сигнал через логичес кий элемент ИЛИ 11 передается на седьмой выход блока 4 управления и останавливает АЦП 1. Этот же сигнал с третьего выхода блока управления запускает блок 6 эталонных признаков. Нулевой выход триггера 2 открывает элемент И 15 и И 12. При этом с выхода блока 6 эталонных при наков синхроимпульсы пост5шают на вход блока управления. В блоке управления эти синхроимпульсы поступают на второй вход логического элемента И 12 к через него на первы выход блока 4 управления и производится считывание на входы блока 7 „сравнения содержимого блоков 5 памя ти. Далее, аналогично описа:нному вьт ,с пятого выхода блока Д управления формируется пять импульсов для сдви га содержимых блока 5 памяти, и вто рой синхроимпульс передает новое значение блока 5 памяти на входы бл ка 7 сравнения. Этот процесс продол жается до истечения времени, необхо димого для идентификации состояний исследуемого объекта. Время определяется экспериментально и устанавливается на выходах делителя частот (показано произвольно). При появлении на указанном выходе делителя частоты сигнал через от рытый логический элемент И 15 посту пает на четвертый выход блока 4 управления и останавливает устройст во. Так завершается очередная работа устройства.
В процессе преобразования аналогового сигнала U(t) в цифровую фор1му происходит его амплитудное квантование x(t), В каждом щаге преобразования с изменением значения входного сигнала U(t) изменяются цифровые значения отсчетов, т.е. в зависимосТаким образом, в предлагаемом устройстве обнаружение изменения состояния объекта в процессе его эксплуатации сводится к подсчету количеств единиц в элементарных сигнгшах q(t) и к выявлению изменения комбинаций количеств единиц. 6 ти от изменения U(t) изменяются состояния соответствующих разрядов счетчика отсчетов аналого-цифрового преобразователя 1, от выходов которых через преобразователь код-аналог вырабатываются аналоговые сигналы, сумма которых в моменты дискретизации оказывается равной входному сигналу U(t)., Этим самым на соответствующих разрядах счетчика отсчетов АЦП входной стационарньй случайный сигнал ll(t) как бы разлагается на элементарные стационарные случайные сигналы q(t), принимающие только два значения (1 и 0) с соответствующими весами. Очевидно, что если преобразуемые сигналы U{t) будут стационарными случайными функциями, то каждый элементарньш сигнал q(t) также будет стационарной случайной функцией. Из теорий вероятности известно, что закон распределения вероятности для стационарного случайного сигнала одного и того же объекта не зависит от времени. Следовательно, закон распределения вероятности как для сигнала U(t;)j так и для элементарных сигналов q{t) одного и того же объекта не изменится, если не изменится состояние объекта. Понятно, что если сигнал принимает всего два состояния (1 или 0), то практически определение его закона распределения сводится к подсчету количест ва единиц или нулей. Следовательно, если состояние объекта не изменяется во времени, то количество единичных (или нулевых) состояний любого сигнала q(t) на достаточно длительных равных отрезках времени будет одинаковым или близким по значению, а для равных отрезков времени комбинации количеств единиц в указанных элементарных сигналах q(t) также будут одинаковыми или близкими. Если же состояние объекта изменяется, то изменяется закон распределения сигнала U(t) и комбинация количеств единиц в элементарных сигналах q(t). Выявление изменения комбинаций количеств единиц происходит следующим образом. С выхода АЦП 1 полученные в пер вом шаге преобразования цифровые эквиваленты всех входных сиТналов поочередно поступают на входы регистра 2 и параллельно записываются в блок 5 памяти. После завершения пер вого шага преобразования по истечении промежутка времени, равного шагу квантования по времени, начинает ся второй шаг преобразования. Одно временно с этим на втором вькоде блока 4 управления появляется сигна по которому с блока 5 памяти считывается на регистр 2 цифровой эквивалент первого входного сигнала, полученный в предыдущем шаге преобразования . Допустим, что В первом шаге преобразования получен код цифрового эквивалента 0001. В текущем шаге преобразования получен с выходом АЦП 1 цифровой эквивалент 0010, который поступает парафазно на входы регистра 2 и одновременно с этим заносится в блок 5 памяти. Как видно из кодов, полученных в текущем и предыдущем шагах преобразования, два старших разряда не изменили своих состояний, а в первом и втором разряде зафиксировано измене ние, т.е. первый разряд из единичного состояния перешел в нулевое, а второй разряд из нулевого состояния перешел в единичное. При этом, если разряд регистра 2 изменил свое состояние с единичного на нулевое, то на соответствующем выходе регистра 2 формируется сигнал, который записывает единицу в счетчик блока 3 счетчиков, соответствующий данному разряду регистра 2. В данном примере это обнаружилос на выходе первого разряда регистра 2, т.е. в первый счетчик блока 3 счетчиков записалась единица. После этого содержимое блока 3 счетчиков записывается в соответствующие адреса блока 5 памяти. Аналогичным образом с блока 5 па мяти по сигналу от блока 4 управления считьшается и записывается на регистр 2. цифровой эквивалент след
ющего сигнала, полученный в предыдущем шаге преобразования, после этого с выходов АЦП 1 на входы ре1
новления состояния объекта.
При этом эталонные признаки, предварительно записанные в соответ6°гистра 2 заносится цифровой эквивалент текущего значения этого же сиг нала. При этом, если разряды регистра 2 изменили свои состояния с единичных на нулевьге. то на соответствующих выходах регистра 2 формируются сигналы, которые записывают единицы в соответствующие счетчики блока 3 счетчиков. Описанный вьше процесс в данном шаге преобразования повторяется для всех каналов. Цифровые эквиваленты текущих значений всех каналов с выходов АЦП 1 и соответствующие содержимые блока 3 счетчиков поочередно записываются на соответствующие адреса блока 5 памяти. В третьем и последующих преобразования по сигналам от блока 4 управления с блока 5 памяти на регистр 2 поочередно заносятся цифровые эквивалентыпредыдущих значений всех сигналов, одновременно с блока 5 памяти в блок 3 счетчиков поочередно заносятся соответствующие содержимые счетчиков, полученных в предьщущих шагах преобразования для каждого канала. В течение времени наблюдения (Т) для каждого входного сигнала в счетчиках блока 3 счетчиков происходит поочередный подсчет количества изменений состояний разрядов регистра 2 с единицы на нуль. Следовательно, содержимое каждого счетчика блока 3 счетчика представляет собой количество изменений состояний каждого разряда регистра 2 за время наблюдения (Т). В конечном счете по истечении времени (Т) в блоке 5 памяти хранится для каждого входного канала соответствукяцее содержимое блока 3 счетчиков. В процессе функционирования устройства на выходах АЦП 1 в каждом шаге преобразования получаются элементарные сигналы ), q(t),... qf,(t)и по истечении времени наблюдения (Т) в соответствующих адресах блока 5 памяти получают количества единиц в указанных элементарных сигналах ), q(t),..., q(t). Этот процесс завершается остановом АЦП 1 по. сигналу от блока 4 управления. После этого начинается процесс устаствующих я:чейках блока 6 эталонных признаков поочередно по сигналам от блока 4 управления поступают на входы блока 7 сравнения. На другие входы блока 7 сравнения по сигналам от блока 4 управления из соответствующих адресов блока 5 памяти посту пают комбинации найденных количеств единиц в элементарных сигналах qCt) q (t),..., q (t) соответствующих каналов. В результате на блоке 7 сравнения производится поочередное сравнение соответствутощих комбинаци эталонных и найденных количеств еди ниц для всех входных каналов. Идентификация состояния объекта производится по номеру эталонных количеств единиц, совпавших с комбинациями количеств единиц, найденных в процессе работы устройства за время Т. Для шрдготовки устройства к авто матизации диагностики определенного класса объектов предварительно производится экспериментальное обследование этих объектов и обучение устройства, т.е. процесс определения комбинаций эталонных количеств единиц должен предшествовать эксплуатации устройства. Обучение устройства производит ся следующим образом. Объект приводится оператором в одно из возможных состояний, и с по мощью устройства, аналогично описанному вь:(ше, определяются комбинации количества единиц для элементар ных сигналов qCt), которые принимаются как эталонный признак для данного состояния объекта и записываются в блок 6 вьщеления эталонных признаков. Аналогичным образом для калу1,ого состояния обследуемого объекта находится и запоминается комбинация эталонных количеств единиц. Естественно, что для каждого состояния объекта в процессе обучения устройства может получиться множество близких по значению комбинаций количеств единиц, которые образуют множество признаков, соответствуквцих это)гу состоянию объекта. Найденное для определенного состояния объекта множество комбинаций количеств единиц для элементарных сигналов q(t) фиксируется в блоке 6 вьщеления эталонных признаков в адресах, соответствующих данному состоянию объекта, которому присваивается определеннь й номер. При совпадении найденньк признаков с одним из эталонных признаков по этим номерам производится идентификация состояния объекта. Для построения предлагаемого устройства возможно использование современных серийно выпускаемых интегральных элементов и аналого-цифровых преобразователей, благодаря этому его изготовление технологично и требует небольших затрат. Применение устройства позволяет обнаруживать не только аварийные, но и предаварийные состояния объекта, вследствие чего появляется возможность своевременного устранения причин возникновения аварий. Это имеет большое практическое значение при применении устройства для диагностики стохастически: стационарных объектов.
«N

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для передачи телеметрической информации | 1985 |
|
SU1262553A1 |
| Устройство для определения фазового перехода теплоносителя в нагнетательных скважинах | 1987 |
|
SU1469113A1 |
| Устройство для передачи и приема информации | 1982 |
|
SU1104571A1 |
| Устройство для вычисления массы нефти и нефтепродуктов в резервуарах | 1983 |
|
SU1117653A1 |
| Устройство для сопряжения вычислительной машины с датчиками | 1982 |
|
SU1070540A1 |
| Устройство для определения фазового перехода теплоносителя в нагнетательных скважинах | 1988 |
|
SU1551802A1 |
| Многоканальное устройство для передачи сигналов приращений | 1982 |
|
SU1103276A1 |
| Логарифмический аналого-цифровойпРЕОбРАзОВАТЕль | 1979 |
|
SU840947A1 |
| Адаптивный кодирующий преобразователь стационарных случайных процессов | 1980 |
|
SU960846A1 |
| Устройство преобразования "аналог-код | 1979 |
|
SU834893A1 |

УСТРОЙСТВО ДЛЯ ДИАГОНОСТИКИ СТАЦИОНАРНЫХ СТОХАСТИЧЕСКИХ ОБЪЕКТОВ, содержащее аналого-цифровой преобразователь, блок сравнения, соединенный первым входом с информационным выходом блока эталонных признаков, а выходом - с входом блока индикации, отличающеес Я тем, что, с целью повьппения надежности устройства,в него введены блок памяти, блок счетчиков импульсов, блок управления и регистр, подключенный первым информационным входом к выходу аналого-цифрового преобразователя и к первому информационному входу блока памяти, вторым информационным входом - к первому информационному выходу блока памяти, а выходом - к счетному входу блока счетчиков импульсов, связанного установочным входом с вторым информационным выходом блока памяти, а выходом - с вторым информационным входом блока памяти, подключенного выходом к второму входу блока сравнения, а первым и вторым управляющими входами - соответственно к первому и второму выходам блока управления, соединенного управляющим входом с первым управляющим выходом блока эталонньрс признаков, а третьим, четвертым, пятым, шестым, седьмым и восьмым (Л выходами - соответственно с первым и вторым управляющими входами блока эталонных признаков, с управляющим входом блока счетчиков импульсов, управляющим входом регистра, первым и вторым управляющими входами аналого-цифрового преобразовао теля, подключенного информационны00 ми в.ходами к выходам коммутатора, 4; а управляющим выходом - соответст венно к информационным выходам и синхронизирующему входу коммутатоOi ра, связанного управляющим входом с восьмым выходом блока управления.
:l
1
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Акустическая диагностика механизмов, Сборник | |||
| Под ред.Б;П.Павлова.М., Машиностроение, 1971, с | |||
| Аппарат для передачи изображений на расстояние | 1920 |
|
SU171A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для распознавания аварийных состояний объектов контроля | 1974 |
|
SU544949A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
