порциональными PI. .. На управляющие входы индуктивностей 13 И 9 и резисторов 15 И 10 подаются величины ве совых коэффициентов q; i COOT ветственно, в результате чего величины индуктивностей 13 и резисторов 15 становятся пропорциональными П| и q;. На управляющий вход источни ка тока 11 И 9 поступают величины ,, (t -t:), устанавливая соответствующую величину тока (С - пери1
Изобретение относится к электроэнергетике .
Цель изобретения - уменьшение объема устройства и улучшение надежно- сти энергоснабжения за счет повышения точности регулирования,
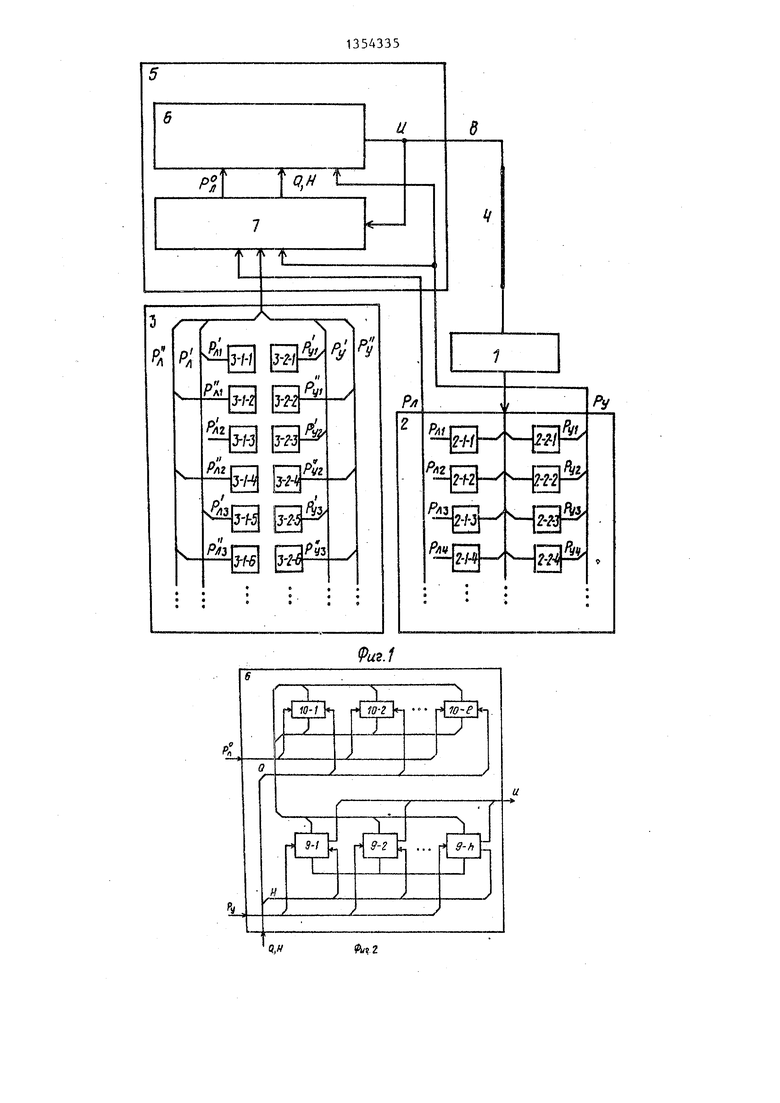
На фиг,1 изображено предлагаемое устройство; на фиг,2 -.блок формирования управляющих воздействий; на фиг,3 и 4 - узлы, входящие в состав блока формирования управляющих воздействий (имитатор узла энергосистемы и имитатор линии электропередач соответственно); на фиг,5 - пример некоторой энергосистеър 1; на фиг, 6 - электрическая цепь, эквивалентная этой энергосистеме.
Устройство (фиг,1) содержит соединенный с энергосистемой 1 блок
2телеизмерений регулируемых параметров и блок 3 задатчиков уставок, С энергосистемой 1 каналом 4 управления мощностью регулирующих объектов связан выходом управляющий блок 5, Входы управляющего блока 5 присоединены к выходам блока 2 телеизмерений регулируемых параметров и блока 3 задатчиков уставок.
Блок 2 телеизмерений состоит из отдельных датчиков 2-1-1, 2-1-2,,,, регулируемых перетоков, 2-2-1, 2-2-2,, ,, генерируемых мощностей,Бло
3задатчиков уставок состоит из отдельных задатчиков 3-1-1, 3-1-2,, уставок по перетокам мощности, 3-2-1-, 3-2-2,,,, уставок по генерируемым мощностям.
Множество выходов датчиков 2-1-1 2-1-2,,,, - это первый выход блока
354335
од измерения). В электрической цепи у-ва от момента t - Г до момента t протекает переходный процесс,. в результате чего к моменту t в ин- дуктивностях 13 устанавливаются токи, которые протекают через усилители 12, Выходные сигналы этих усилителей используются как фактические управляющие воздействия для изменения мощности регулирующих объектов . 6 ил.
2 телеизмерений, а множество выходов датчиков 2-2-1, 2-2-2,,,, - второй выход этого блока.
Аналогично множество выходов задатчиков 3-1-1, 3-1-2,,,, и 3-2-1, 3-2-2,,,, - это выход блока 3 задатчиков уставок.
Управляющий блок 5 содержит блок
6 формирования управляющих воздействий и блок 7 расчета фактических уставок и весовых; коэффициентов, у которого к трем первым входам присоединены выходы блока 2 телеизмерений
5 и выход блока 3 задатчиков уставок, а четвертый вход соединен с выходом блока 6 формирования управляющих воздействий, У этого блока 6 выход является выходом 8 управляющего блока
Q 5 в целом, два первых входа подключены к выходам блока 7 расчета фактических уставок и весовых коэффициентов, а третий вход соединен с первым выходом блока 2 телеизмерений.
5
Блок формирования управляющих воздействий (фиг,2) выполнен из имитаторов 9-1, 9-2,,, 9-k,,,, узлов энергосистемы и имитаторов 10-1, 10-2,,,,
Q 10-1,,,, линий электропередач, количество кото рьпс определяется количеством узлов и линий электропередач энергосистемы. Каждый имитатор 10 линий электропередач имеет два функциональных и два управляющих входа, а каждый имитатор 9 узла энергосистемы имеет еще и управляющий вьжод, причем выходы образуют в совокупности выход блока 6 формирования управляющих воздействий в целом. Первые
5
управляющие входы всех имитаторов 9 и 10 образуют в совокупности первый вход этого блока, вторые управляющие входы всех имитаторов 10 лин электропередач.- второй вход этого блока, вторые управляющие входы все имитаторов 9 узлов энергосистемы - третий вход этого блока. Первые функциональные входы всех имитаторов 9 узлов энергосистемы объединены. Вторые функциональные входы этих имтаторов 9 и первый и второй функциональные входы всех имитаторов 10 линий электропередач соединены межд собой аналогично соединению концов имитируемых линий электропередач с имитируемыми узлами энергосистемы: каждая линия электропередач имитируется одним из имитаторов 10-i, а каждый узел энергосистемы имитируется одним из имитаторов 9-k.
Каждый имитатор 9 узла энергосистемы (фиг.З) выполнен в виде управляемого источника 11 тока, включенного между функциональными входами имитатора, параллельно источнику 11 тока подключена цепь из последовательно соединенных усилителя 12 и управляемой индуктивности 13, Управляющие входы управляемой индуктивности 13 и управляемого источника 11 тока являются соответственно первым и вторым управляющими входами имитатора 9, а выход усилителя 12 является управляющим выходом имитатора 9,
Каждый имитатор 10 линии электропередач (фиг.4) выполнен в виде параллельно соединенных управляемого источника 14 тока и управляемого резистора 15, подключенных между двумя функциональными входами имитатора, а управляющие входы управляемого резистора 15 и управляемого источника 14 тока являются соответственно первым и вторым управляющими входами имитатора.
Блок 7 расчета фактических уставок и весовых коэффициетов выполнен в полном соответствии с известным. Этот блок содержит две группы схем сравнения, входы которых являются входами блока расчета фактических уставок и весовых коэффициентов. Кроме того, блок 7 содержит блоки регистров, выходы которых являются выходами блока 7 расчета фактически уставок и весовых коэффициентов.
Важно отметить, что источники 11 и 14 тока, используемые в устройстве, вырабатывают ток постоянной величины, не зависящий от напряжения на зажимах источника тока и определяемый сигналом на его управляющем входе.
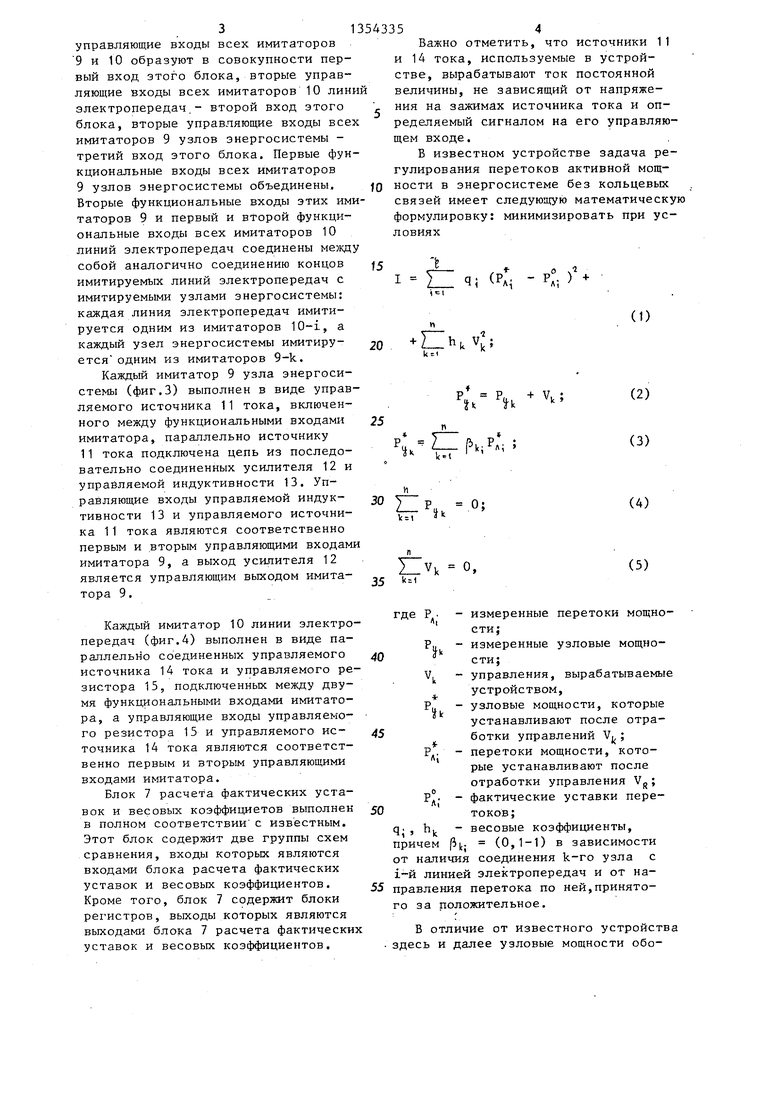
В известном устройстве задача регулирования перетоков активной мощности в энергосистеме без кольцевых связей имеет следующую математическую формулировку: минимизировать при условиях
1
I
q; (Р,
А;
- Р
л;
)%
(О
20
Пь
k
.
п
+ V,
k
(2)
25
(3)
1
ПР
V l
U
0;
(4)
Hvk о,
(5)
35 kn
0
5
где Р . - измеренные перетоки мощно- 1
сти;
Ри - измеренные узловые мощности;
V, - управления, вырабатываемые устройством,
-узловые мощности, которые устанавливают после отработки управлений
-перетоки мощности, которые устанавливают после отработки управления
-фактические уставки перетоков;
qj , h| - весовые коэффициенты, причем i|(. (0,1-1) в зависимости от наличия соединения k-ro узла с i-й линией электропередач и от на- 5 правления перетока по ней,принятого за положительное.
В отличие от известного устройства здесь и далее узловые мощности обо0
k
э
н
л;
значаются символом.
их от генерируемых
.мощностей нагрузки
РИ
Р,
- Р„
Кроме того, имеет место уравнение
iz p,,P,tx
(7)
аналогичное уравнению (3), т.е. в любой момент времени t узловая мощность равна сумме перетоков по линиям передач, сходящимся в данном узле.
Эта математическая модель не учи - тывает динамику процесса регулирования и поэтому в известном устрой15
кия одновременно. Кроме того, само наличие корректирующих фильтров усложняет известные устройства. , Математическая формулировка задачи регулирования, которая решается .в предлагаемом устройстве, учитывает требования по. ограничению фактических управляющих воздействий, п обеспечению номинальной частоты в пе реходный период регулирования и по обеспечению минимума отклонения кон- тролируемьгх перетоков от заданных ус тавок.
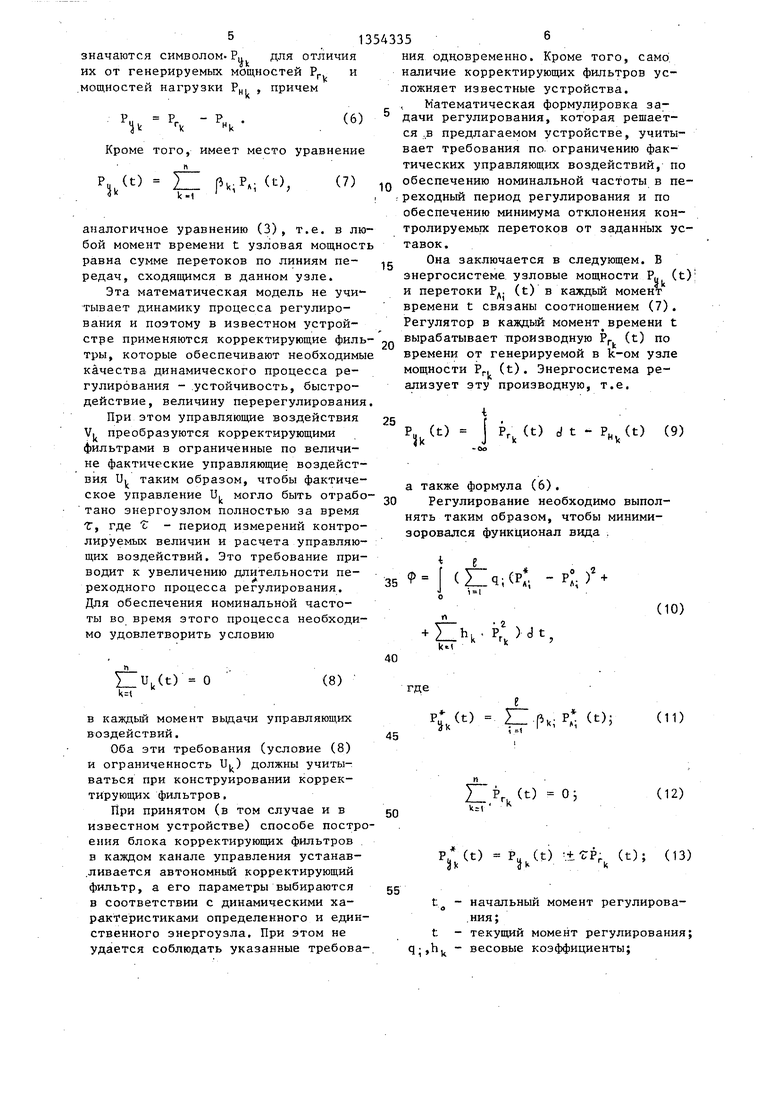
Она заключается в следующем. В энергосистеме узловые мощности Рц ( и перетоки Рд. (t) в каждый момент
времени t связаны соотношением (7).
Регулятор в каждьй момент времени t стре применяются корректирующие филь- j,. вырабатывает производную Р. о тры, которые обеспечивают необходимые времени от генерируемой в k-ом узле качества динамического процесса регулирования - устойчивость, быстродействие, величину перерегулирования.
мощности РГ, (t). Энергосистема реализует эту производную, т.е.
При этом управляющие воздействия Уц преобразуются корректирующими фильтрами в ограниченные по величине фактические управляющие воздействия Uj таким образом, чтобы фактичеCKoe управление U| могло быть отработано энергоузлом полностью за время Т, где с - период измерений контролируемых величин и расчета управляющих воздействий. Это требование приводит к увеличению длительности переходного процесса регулирования. Для обеспечения номинальной частоты во время этого процесса необходимо Удовлетворить условию
U(t) О
(8)
в каждый момент выдачи управляющих воздействий.
Оба эти требования (условие (8) и ограниченность U) должны учитываться при конструировании корректирующих фильтров.
При принятом (в том случае и в известном устройстве) способе построения блока корректирующих фильтров в каждом канале управления устанав- .ливается автономный корректирующий фильтр, а его параметры выбираются в соответствии с динамическими характеристиками определенного и единственного энергоузла. При этом не удается соблюдать указанные требова
кия одновременно. Кроме того, само наличие корректирующих фильтров усложняет известные устройства. , Математическая формулировка задачи регулирования, которая решается .в предлагаемом устройстве, учитывает требования по. ограничению фактических управляющих воздействий, по обеспечению номинальной частоты в переходный период регулирования и по обеспечению минимума отклонения кон- тролируемьгх перетоков от заданных уставок.
Она заключается в следующем. В энергосистеме узловые мощности Рц (t) и перетоки Рд. (t) в каждый момент
времени t связаны соотношением (7).
Регулятор в каждьй момент времени t вырабатывает производную Р. о времени от генерируемой в k-ом узле
мощности РГ, (t). Энергосистема реализует эту производную, т.е.
Р Ct) j р, (t) d t ,t)
(9)
а также формула (6).
Регулирование необходимо выполнять таким образом, чтобы миними- зоровался функционал вида ,
е (Cq;
1 i l
(Р
Л|
Р:. f
(10)
Р. ) d t
где
Ь
(t)
(t);
(11)
) oj
(12)
50
им
P;(t) P(t) , (t); (13)
- начальный момент регулирова. ния;
- текущий момент регулирования; - весовые коэффициенты;
, 1л
+ I,
I. + 1г +
I, 0.
Предположим , что
+ I,, + I,
О
-33
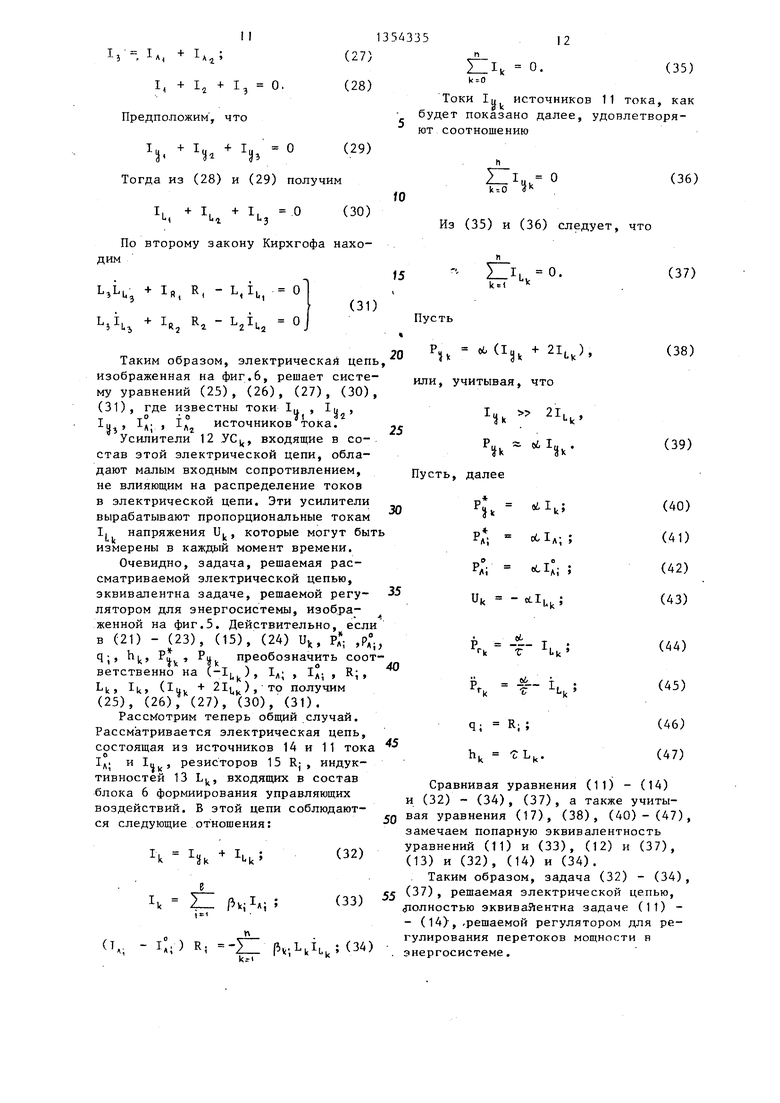
Тогда из (28) и (29) получим
+ IL + IL
Ь12, U
.0
(27) (28)
(29) (30)
По второму закону Кирхгофа нахоrilk 0.(35)
Токи IN источников 11 тока, как будет показано далее, удовлетворяют соотношению
(36)
fO
I.. о
k-0
Из (35) и (36) следует, что
дим
, + I
я, ( L, IL,
(31)
L.II
5 I.J
+ I.
R. - 4iu,
kel
I, 0.
(37)
Пусть
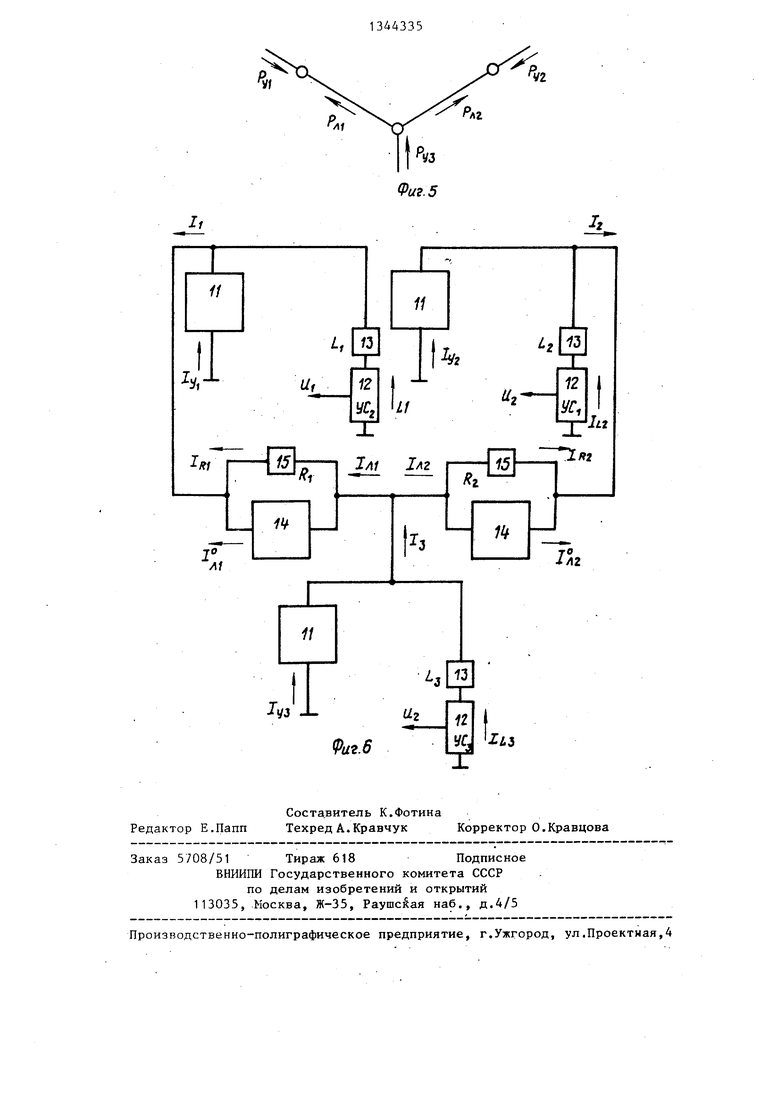
Таким образом, электрическай цепь изображенная на фиг,6, решает систему уравнений (25), (26), (27), (30), (31), где известны токи 1,, , lu , Ij, , 1д. , i° источников тока.
Усилители 12 .УС|, входящие в состав этой электрической цепи, обладают малым входным сопротивлением, не влияющим на распределение токов в электрической цепи. Эти усилители вырабатывают пропорциональные токам I, напряжения U|, которые могут быт измерены в каждый момент времени.
Очевидно, задача, решаемая рассматриваемой злектрической цепью, эквивалентна задаче, решаемой регу- лятором для энергосистемы, изображенной на фиг.5. Действительно, если в (21) - (23), (15), (24) Ufc, Р ,р;.
Ч;
Н
ь
преобозначить соотI.; . I
А
R:
ветственно на (-1ц ),
Lk, Ik, duj, + 21,), то получим
(25), (26), (27), (30), (31).
Рассмотрим теперь общий случай. Рассматривается электрическая цепь, состоящая из источников 14 и 11 тока 1д. и 1м 1, резисторов 15 RJ , индук- тивностей 13 L,, входящих в состав блока 6 формиирования управляющих воздействий. В этой цепи соблюдаются следующие отношения:
Зк В
f I
Uk
Pvi
.1
А;
(32)
(33)
(Т.. - ) R, kri
p,.L,i,;(34)
Ь
об (I
21,..).
(38)
или, учитывая, что
-П
21,
.
oi I
(39)
Пусть, далее
Сравнивая уравнения (11) - (14) и (32) - (34), (37), а также учиты- 50 вая уравнения (17), (38), (40) - (47), замечаем попарную эквивалентность уравнений (11) и (33), (12) и (37), (13) и (32), (14) и (34). . Таким образом, задача (32) - (34), 55 (37), решаемая электрической цепью, толностью эквивалентна задаче (11) - - (14), /решаемой регулятором для регулирования перетоков мощности н . энергосистеме.
13
Устройство в целом функционирует следующим-образом.
Из блока 2 телеизмерения на входы Йюка 7 расчета фактических уставок и весовых коэффициентов поступают измеренные значения перетоков Р,- и узловых мощностей Рп . На другие входы этого же блока 7 поступают из бло
ка 3 задатчиков уставок уставки Р . ,
II I
Р/у. , Ри , Ру,. В результате этого
блок 7 рассчитывает фактические усо
тавки и весовые коэффициенты q; и h;. Из .блока 7 расчета фактических уставок и весовых коэффициентов на управляющие входы источников 14 тока подаются величины Р., тавок перетоков. Таким образом, токи
источников 14 становятся равным величинам 1д. , пропорциональным уставкам перетоков Р, .
Кроме того, из блока 7 расчета фактических уставок и весовых коэффициентов на управляющие входы ин- дуктивностей 13 и резисторов 1 подаются величины весовых коэффициентов
h. и q; соответственно. Таким образом, величины Ljj и R; становятся пропорциональными коэффициентам h и q
В момент времени (t - ) из блока 2 телеизмерения на управляющие вхо- ды источников 11 тока поступают величины PU (t - С ), устанавливая вели- чину тока
I(t- .) -jiP Jt-г)
этих источников (также величина (39) Эта величина поддерживается постоянной в течение времени 3 вплоть до следующего акта измерения величины Pu/t).
В электрической цепи устройства от момента (t - Г) до момента (t) протекает переходный Процесс, в результате чего к моменту (t) в ин- дуктивностях 13 устанавливаются токи L.(t) - эти токи из-за наличия йндуктивностей не изменяются скачкообразно, несмотря на скачообразно изменение токов (,. в момент измерения Р|. . Токи 1| (t) протекают также через усилители 12 (с малым входным сопротивлением). Сигналы U,(t) с выходов этих усилителей в качестве фактических управляющих воздействий поступают через канал 4 в энергосистему 1 для изменения мощности регулирующих объектов (так
JO
25
14
же выр.ажение (43) . Эти мощности изменяются за время -К на величину фактических управляющих ) и величину возмущения (t +), т.е. реализуется уравнение (18). Одновременно меняются значения регулируемых параметров Р энергосистемы.
и Р,
че
jg
Измененные значения Ру. ч. рез период Т вновь измеряются датчиками блока 2 телеизмерений и т.д. При этом в течение периода & эти измерения остаются неизменными, так как выполняется соотнощение (20).
Коэффициенты пропорциональности . 5 усилителей 12 и управляемых напряжением источников 11 и 14 тока обеспечивают выполнение условий.(39) - (47) . Поэтому электрическая цепь, решая задачу (32) - (34), (37) , решает тем самым задачу оптимизации перетоков мощности (система уравне- НИИ (1.1), (12), (13), (14), (17), (18), (19), (20).
Таким образом, электрическая цепь устройства и энергосистема образуют замкнутый контур системы регулирования. При этом переходный процесс в электрической цепи устройства развивается синхронно с переходным процессом в энергосистеме при реали- э-ации фактических управляющих воздействий.
20
Формула изобретен и я
Устройство автоматического регулирования перетоков активной мощности в энергосистеме, содержащее блок телеизмерения регулируемых параметров, состоящий из датчиков перетоков мощности и датчиков генерируемых мощностей, вход которого соединен с энергосистемой, первый выход объединяет выходы датчиков перетоков мощности, а второй. - выходы датчиков генерируемых мощностей,блок задатчиков уставок, выход которого объединяет выходы задатчиков уставок и упра вляющий блок, связанный своим выходом через канал управления мощностью регулирующих объектов с энергосистемой, причем управляющий блок содержит блок формирования управляющих воздействий и блок рас- чета фактических уставок и весовых
коэффициентов, у которого имеется первый вход, связанный с первым выходом блока телеизмерений, объединя
1.- коэффициенты, имеющие тот же смысл, что и в задаче (1) - (5);
t - заданный интервал времени. В функционале (10) величины Рп (t) Рд. (t) - это величины, прогнозируемые в момент t на момент (t +), величины Pa.(t +€) Р. (t +Г) - это величины, которые вычисляются в предположении отсутствия изменения нагрузки P и постоянства f на интервале (t, t + €) . Формула (12) аналогичная формуле (8) и отражает требования постоянства частоты в прогнозируемый момент (t +(:), а формула (11) аналогична формуле (3).
Функционал (10) выбран таким образом, что его минимизация на всем интервале регулирования соответствует минимизации отклонения перетоков Рд; от уставок Рд. (первый член суммы) и минимизации скоростей изменения РГ генерируемых мощностей (второй член суммы).
В установившемся режиме при t ь tg + Т и отсутствии возмущений переменные в задаче (9) - (13) принимают постоянные значения
.(t-b);
Р (t) Р. (t +€-);
Л Ля
P,(t),
в этом режиме функционал (10) принимает вид
-t
(Р
1 Е: q; (Pi; ) dt:. VT -
функция (1) после реализации управлений, т.е. при V|j 0, ет вид
Ч;(РЛ; -Ь-ГРТаким образом, величины и I достигают минимума при одних и тех же значениях величин Р. , т.е. установившееся решение задачи минимизации Ф при (9) - (13) совпадает с решением задачи минимизации I при (1) - (5). Эти замечания подтверждают правильность выбора функционала. Они же свидетельствуют о том, что коэффициенты h| и q должны выбираться так же, как и в известном устройстве.
Таким образом, регулирование перетоков является вариационной задачей минимизации функционала, (10) при ограниченных (9), (11) и (13). Применяя для решения этой задачи метод множителей Лангранжа, находим, что она эквивалентна решению системы уравнения (9), (11) - (13) и
)
ihkЧ, (14)
где Рр - вторая производная мощности РГ- .
При выводе формулы (14) используется допущение о малых величинах РГ и f вида
РГ, , (15)
а также соотношение
i °
(16)
30
следующее из того, что линия передач соединена только с двумя узлами.
Итак, задача регулирования перетоков состоит в решении системы уравнений (9), (11) - (14) с неизвестны PU РГ. и измеряемыми Р . Регулятор должен решать систему уравнений (11) - (14), непрерывно измеряя величины Рь, и непрерывно вырабатывая величины Р(,. . Энергосисте401
ма при этом формирует узловые мощности Р„ по формуле (9). Обозначим
Ulc
Р
-
(17)
0
Упростим задачу, полагая-, что регулятор непрерывно вырабатывает величины РГ , но в энергосистему выдает периодически через интервал фактические управляющие воздействия Uj, , а эти воздействия малы и потому успевают отрабатываться энергосистемой за время t , Это условие обеспечивается выбором коэффициентов h| в функционале (10).
Следующее упрощение состоит в том, что величины Р,, можно измерять не непрерьшно, а тоже с периодом Г .
полагая, что на интервале (t,)
10
Rt jin4vu a F
ik
остается постоянной.
Таким образом, если tj - моменты выдачи фактических управляющих воздействий U|,(t) и измерения узловых мощностей РМ (t), то
Ь
+
(t; +-0 ) Pu.Ct;) + U.Ct:) +
k (tj +e).
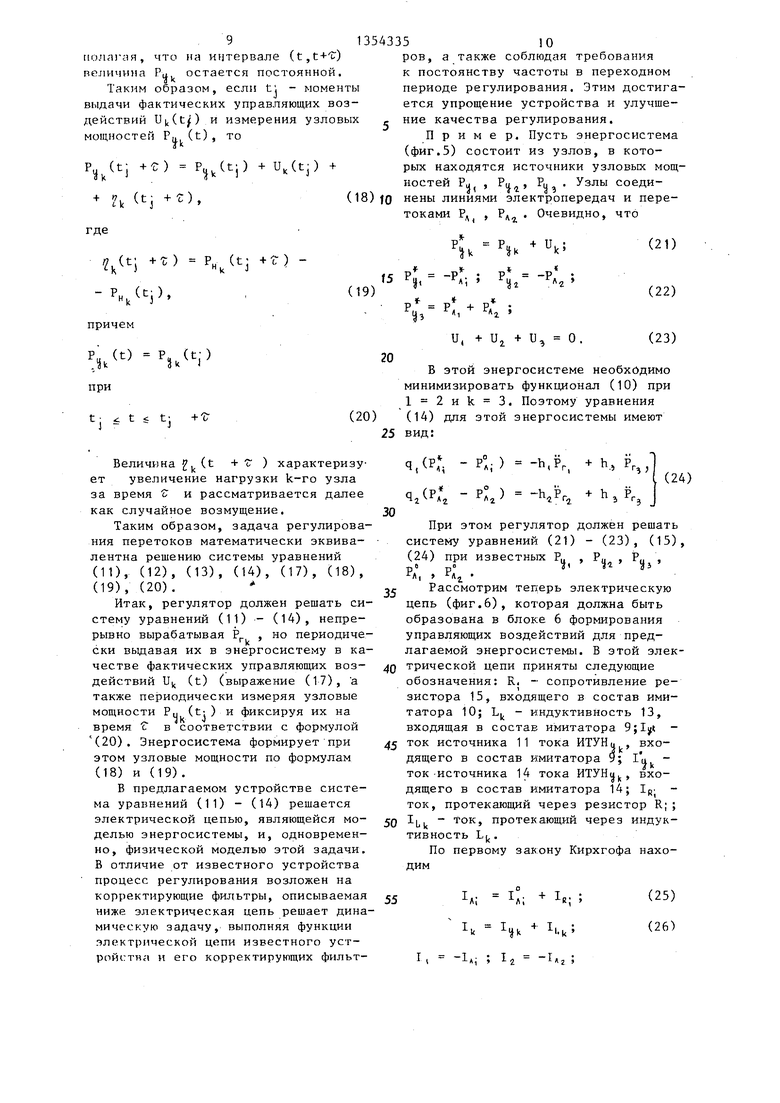
ров, a также соблюдая требования к постоянству частоты в переходном периоде регулирования. Этим достигается упрощение устройства и улучше- . ние качества регулирования.
Пример. Пусть энергосистема (фиг.5) состоит из узлов, в которых находятся источники узловых мощностей PU Pijo ч« Узлы соеди- (18) fo йены линиями электропередач и перетоками Р,
Очевидно, что
(t; +г) (19)
V Ь)
при
J t t;
+ 0
(20)
Величина 2i ) характеризует увеличение нагрузки k-ro узла за время и рассматривается далее как случайное возмущение.
Таким образом, задача регулирования перетоков математически эквива- лентна решению системы уравнений (11), (12), (13), (14),(17), (18), (19), (20).
Итак, регулятор должен решать систему уравнений (11) - (14), непрерывно вырабатывая Р , но периодически вьщавая их в энергосистему в качестве фактических управляющих воздействий U(, (t) (выражение (17), а также периодически измеряя узловые
мощности Рм (t: ) и фиКСИруЯ ИХ на
время tr в соответствии с формулой 420). Энергосистема формирует при этом узловые мощности по формулам (18) и (19).
В предлагаемом устройстве система уравнений (11) - (14) решается электрической цепью, являющейся моделью энергосистемы, и, одновременно, физической моделью этой задачи. В отличие от известного устройства процесс регулирования возложен на корректирующие фильтры, описываемая ниже электрическая цепь решает динамическую задачу, выполняя функции электрической цепи известного уст- ройстнсЧ и его корректирующих фильт1354335
10
токами Р,
Очевидно, что
(21)
(22)
и, + и + и, 0.
(23)
В этой энергосистеме необходимо минимизировать функционал (10) при 1 2 и k 3. Поэтому уравнения (14) для этой энергосистемы имеют
25 вид:
(24)
30
При этом регулятор должен решать систему уравнений (21) - (23), (15),
(24) при известных Р.. р«
л,
Р Р Ml
Рассмотрим теперь электрическую цепь (фиг.6), которая должна быть образована, в блоке 6 формирования управляющих воздействий для предлагаемой энергосистемы. В этой электрической цепи приняты следующие обозначения: R, - сопротивление резистора 15, входящего в состав имитатора 10; L, - индуктивность 13, входящая в состав имитатора 9; ток источника 11 тока ИТУНц , входящего в состав имитатора У; I a - ток-источника 14 тока ИТУНи|, входящего в состав имитатора 14; Ig - ток, протекающий через резистор R;;
LL ток, протекающий через индуктивность L..
По первому закону Кирхгофа находим
55 IA; IA; + IR; 5
и - i.k
(25) (26)
-ft IAJ i i .г
ющим выходы датчиков перетоков мощ- ности, второй вход, связанный с вторым выходом блока телеизмерений, объединяющим выходы датчиков генерируемых мощностей, третий вход, связанный с выходом блока задатчиков уставок, четвертый вход, связанньм с выходом блока формирования управляющих воздействий, первьй выход фактических уставок и второй выход весовых коэффициентов , блок формирования управляющих воздействий выполнен из имитаторов узлов энергосистемы и имитаторов линий электропередач, количество которых определяется количеством узлов и линий электропередач энергосистемы, каждый имитатор линии электропередач имеет два функциональных и два управляющих входа, а каждьй имитатор узла энергосистемы имеет еще и управляющий вьрсод, причем эти выходы образуют в совокупности выход блока формирования управляющих воздействий в целом, первые управляющие входы всех имитаторов образуют в совокупности первый вход блока формирования управляющих воздействий, связанный с вторым выходом весовых коэффициентов блока расчета фактических уставок и весовых коэффициентов, вторые управляющие входы всех имитаторов линий электропередачи образуют в совокупности второй вход блока формирования управляющих воздействий, связанный с первым выходом блока расчета фактических ус - тавок и весовых коэффициентов, вторые управляющие входы всех имитаторов узлов энергосистемы образуют в совокупности третий вход блока формирования управляющих воздействий, связанный с вторым выходом блока телеизмерений, объединяющим выходы датчиков генерируемых мощностей.
первые функциональные входы всех имитаторов узлов энергосистемы объединены, вторые фнукциональные входы этих имитаторов и первый и второй функциональные входы всех имитаторов линий электропередачи соединены между собой аналогично соединению концов имитируемых линий электропередач с имитируемыми узлами энер0 госистемы, при этом каждый имитатор узла энергосистемы содержит усил:и- тель и управляемый источник тока, включенный между двумя функциональными входами имитатора, управляю5 щий управляемого источника тока является вторым управляющим входом имитатора в целом, а выход уси - . лителя является управляющим выходом имитатора в целом, каждый имитатор
0 линии электропередач выполнен в виде параллельно соединенных управляемого резистора и управляемого источника тока, подключенных между двумя функциональными входами ими5 татора, а управляющие входы управляемого резистора и управляемого источника тока являются соответственно первым и вторым управляющими входами имитатора в целом, о т л и 0 чающееся тем, что, с целью упрощения устройства и повышения точности регулирования, в нем выходом управляющего блока в целом является выход блока формирования
г управляющих воздействий, а в каждый .имитатор узла энергосистемы дополнительно включена управляемая индуктивность, управляющий вход которой является первым управляющим входом
Q имитатора в целом, причем усилитель и управляемая индуктивность соединены в последовательную цепь, которая включена параллельно с управляемым источником тока.
Изобретение относится к области электротехники. Цель изобретения - упрощение у-ва и повышение точности регулирования. Из блока телеизмерений на вход блока расчета фактических уставок и весовых коэффициентов поступают измеренные значения перетоков Рд. и узловых мощностей -ч На другие входы этого же блока поступают из блока задатчиков уставок Рд. , Рд . , Р , Р . В результате рассчитываются фактические уставки Рд; и весовые коэффициенты q. и П| , значения которых подаются на входы блока формирования управляющих воздействий, выполненного- из имитаторов (И) 9 узлов энергосистемы и И 10 линий электропередачи, количество которых определяется количеством узлов и линий электропередач энергосистемы. На управляющие входы источников тока 14 И 10 подаются величины Рд) , в результате чего токи источников 14 становятся прос (Л со 00 w ел
5,
И,- 2
Mf
Редактор Е.Папп
Составитель К.Фотина
Техред А.Кравчук Корректор О.Кравцова
Заказ 5708/51 Тираж 618Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, -Москва, Ж-35, Раушсйая наб., д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная,4
| Устройство автоматического регулирования перетоков активной мощности в энергосистеме | 1984 |
|
SU1164822A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
