Изобретение относится к машиностроению, в частности к исполнительным механизмам пневмонриводов, и может быть использовано в блокирующих механизмах автоматизированных средств технологического контроля, требующих быстрого и точного дискретного позиционирования изделия.
Известен пневмоцилиндр, содержащий корпус, в котором с образованием рабочих полостей установлены щток и порщень, имеющий радиальные и осевые каналы, управляемые клапаны и стопорное устройство с магнитными приводами, снабженное подвижным магнитопроводом и механизмом возврата 1.
Недостатком известного пневмоцилиндра является наличие пружин в механизме возврата, что снижает надежность и быстродействие.
Целью изобретения является повыщение надежности.
Указанная цель достигается тем, что в пневмоцилиндре, содержащем корпус, в котором с образованием рабочих полостей установлены щток и порщень, имеющий радиальные и осевые каналы, управляемые клапаны и стопорное устройство с магнитными 1;риволами, снабженное подвижным магнитонроводом и механизмом возврата, механизм возврата выполнен в виде нескольких пар постоянных ма1нитов, установленных pa:,i()iiMoniibiMH полюсами навстречу один другому, в каждой из которых один закреплен на HopiuHC, а другой - на магнитопроводе, разме1ценном в радиальном канале цорщня, с возможностью взаимодействия с корпусом и кинематически связан с управляемым клапаном.
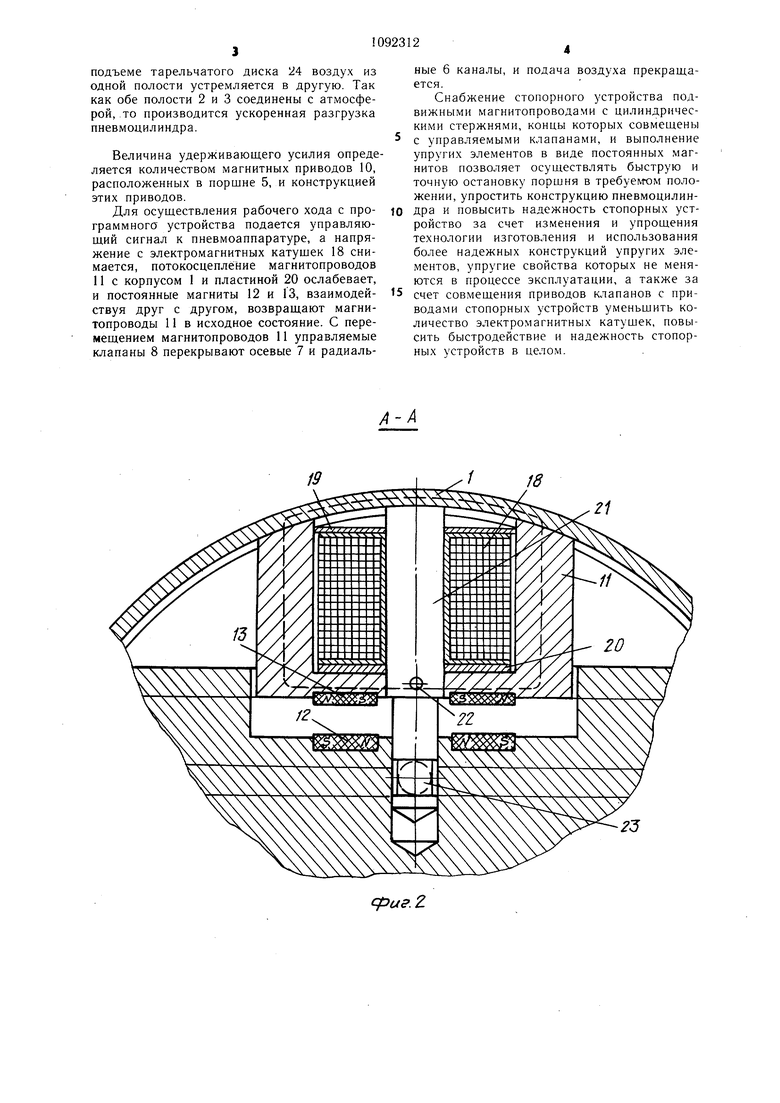
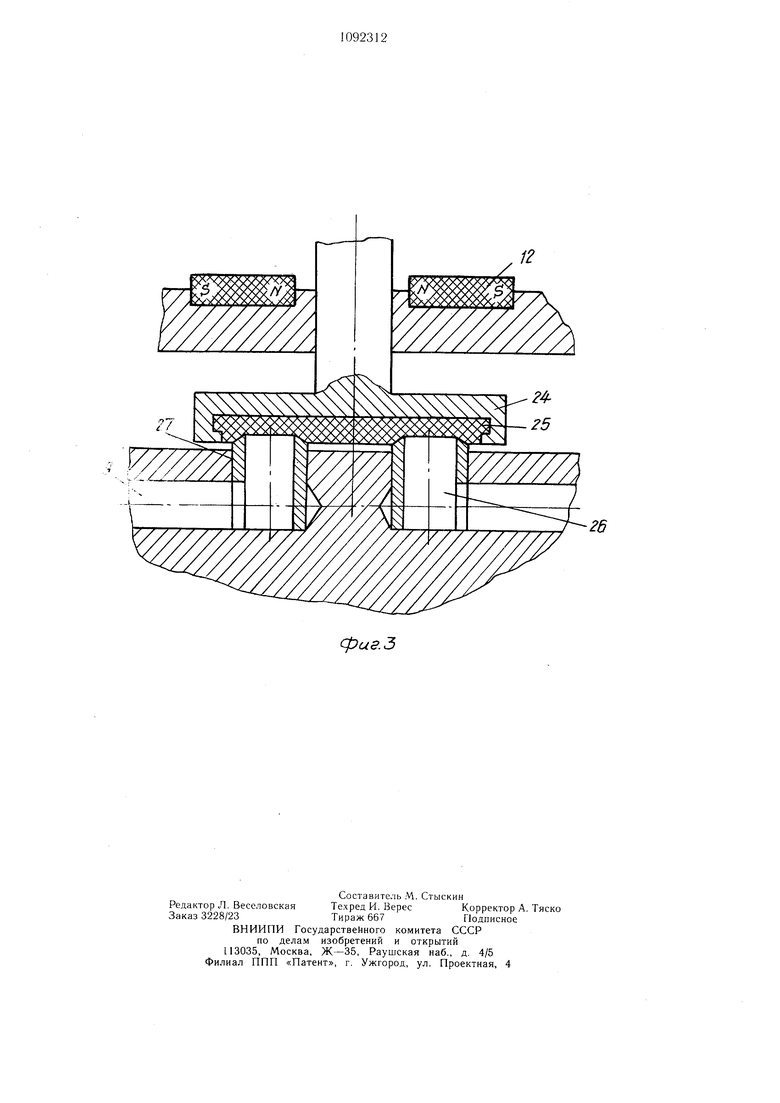
На фиг. 1 представлена схема пневмоцилиндра; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - вариант конструкции управляемого клапана.
Пневмоцилиндр содержит корпус 1, в ко.тором с образованием рабочих полостей 2 и 3 установлены шток 4 и поршень 5. Поршень 5 имеет радиальные 6 и осевые 7 каналы, управляемые клапаны 8 и стопорное устройство 9. Стопорное устройствоЭимеет магнитные приводы 10, снабженные подвижным магнитопроводом 11 и механизм возврата, вь полненный в виде нескольких пар постоянных магнитов 12 и 13, установленных разноименными полюсами навстречу один другому. Магниты 12 закреплены на порщне, а магниты 13 - на магнитопроводах 11, размещенных в радиальном канале 6 порщня 5, с возможностью взаимодействия с корпусом 1 и кинематически связанных с управляемыми клапанами 8.
Корпус 1 имеет подводящие каналы 14 и 15 и выполнен из магнитопроводящего материала, а крышки 16 и 17 и шток 4 с поршнем 5 - из алюминиевого сплава. Магнитные приводы 10, кроме магнитопроводов 11, имеют неподвижно закрепленные в поршне 5 электромагнитные катушки 18 с каркаса.ми 19, снабженные магнитопроводящи.ми пластинами 20. На магнитопроводах 11 закреплены центральные цилиндрические стержни 21 посредство.м штифтов 22.
Управляемыеклапаны 8 (фиг. 2) являются продолжением стержней 21 и выполнены в ввде золотниковых распределителей, 0 имеющих кольцевые полости 23, через которые они сообщают полости 3 и 4 в мо.мент торможения пневмоцилиндра.
Управляемые клапаны 8 конструктивно могут быть выполнены в виде тарельчатых дисков 24, снабженных уплотнительными элементами, выполненными, например, в виде мягких резиновых вкладышей 25 (фиг. 3), и расположенных под перепускными отверч;тиями 26. В радиальных каналах 6 находятся упорные втулки 27 с коническими по0верхностями, постоянно поджатыми к вкладыщам 25 посредством элементов упругости.
Втулки 27 на сторонах, обращенных к осевым каналам 7, имеют отверстия для прохода воздуха.
Магниты 12 и 13 выполнены из материала
5 обладающего высокой коэрцитивной силой,
установлены полюсами навстречу другу к
другу и образуют магнитоупругую систему,
у которой нет внещних подвижных частей.
Пневмоцилиндр работает следующи.м образом.
При подаче давления в одну из рабочих полостей 2 или 3 через каналы 14 и 15 крыщек 16 и 17 пневмоцилиндра осуществляется перемещение порщня 5 со штоком 4. При перемещении поршня 5 электромагнит, ные катушки 18 обесточены, магнитопроводы 11 притянуты постоянными магнитами 12 и 13 и расположены на некотором расстоянии от катушек 18. Все осевые каналы 7 перекрыты управляемыми клапанами 8.
При подаче управляющего сигнала на остановку программное устройство (не показано) подает напряжение питания на электромагнитные катушки 18 и управляющую аппаратуру (не показана). В ..момент отключения давления воздуха и соединения полостей 2 и 3 с атмосферой в электромагнитных катушках 18 возникает магнитное поле, которое усиливается каркасами 19 и пластинами 20. Магнитопроводы 11 преодолевают сопротивление притяжения постоянных маг0 нитов 12 и 13, перемещаются в направлении к корпусу 1 и притягиваются к нему, замыкая магнитный поток через оси магнитопроводов П. Остановка и стопорение порш- j ня осуществляется за счет возникающих магнитных сил и сцепления .магнитопроводов
5 11 с корпусом 1. Одновременно с перемещением магнитопроводов 11 управляемые клапаны 8 сообщают осевые каналы 7 полостей 2 и 3 через кольцевую полость 23 или при подъеме тарельчатого диска 24 воздух из одной полости устремляется в другую. Так как обе полости 2 и 3 соединены с атмосферой, то производится ускоренная разгрузка пневмоцилиндра. Величина удерживающего усилия опреде ляется количеством магнитных приводов 10, расположенных в поршне 5, и конструкцией этих приводов. Для осуществления рабочего хода с программнога устройства подается управляющий сигнал к пневмоаппаратуре, а напряжение с электромагнитных катушек 18 снимается, потокосцепление магнитопроводов 11 с корпусом 1 и пластиной 20 ослабевает. и постоянные магниты 12 и 13, взаимодействуя друг с другом, возвращают магнитопроводы 11 в исходное состояние. С перемещением магнитопроводов 11 управляемые клапаны 8 перекрывают осевые 7 и радиальные б каналы, и подача воздуха прекращается. Снабжение стопорного устройства подвижными магнитопроводами с цилиндрическими стержнями, концы которых совмещены с управляемыми клапанами, и выполнение упругих элементов в виде постоянных магнитов позволяет осуществлять быструю и точную остановку поршня в Tpe6yeNTOM положении, упростить конструкцию пневмоцилиндра и повысить надежность стопорных устроиство за счет изменения и упрощения технологии изготовления и использования более надежных конструкций упругих элементов, упругие свойства которых не меняются в процессе эксплуатации, а также за счет совмещения приводов клапанов с приводами стопорных устройств уменьшить количество электромагнитных катушек, повысить быстродействие и надежность стопорных устройств в целом.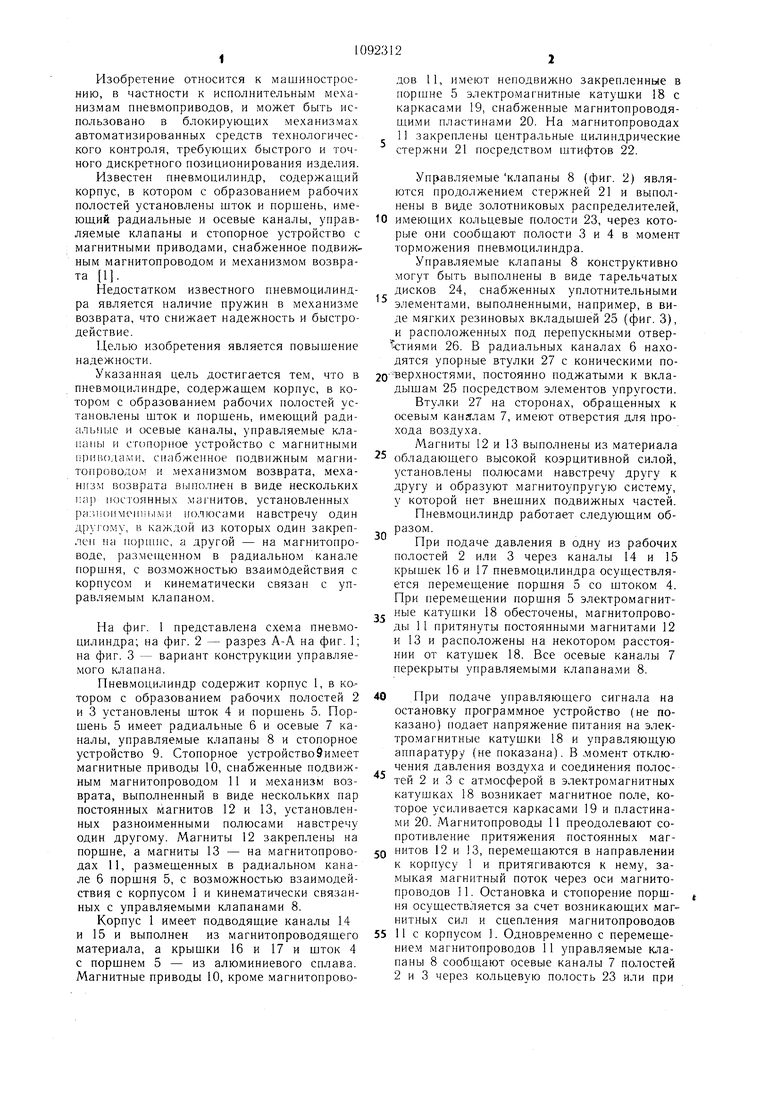
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропаяльник для демонтажа радиоэлементов | 1979 |
|
SU863212A1 |
| ПОРШНЕВОЙ КОМПРЕССОР С ЭЛЕКТРОДИНАМИЧЕСКИМ ПРИВОДОМ | 1989 |
|
RU2005912C1 |
| РЕЗЕРВИРОВАННЫЙ ЗАПОРНЫЙ МАГИСТРАЛЬНЫЙ ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ КЛАПАН МОДУЛЬНОГО ИСПОЛНЕНИЯ ДЛЯ ВСТРОЕННОГО МОНТАЖА, ВЫСОКИХ ДАВЛЕНИЙ И ТЕМПЕРАТУР | 2007 |
|
RU2350813C1 |
| Сенсорный клапан Овандера В.Б. | 1989 |
|
SU1721364A1 |
| КЛАПАН С ЭЛЕКТРОМАГНИТНЫМ ДВУХПОЗИЦИОННЫМ ПРИВОДОМ | 2011 |
|
RU2517002C2 |
| МАГНИТОРЕОЛОГИЧЕСКАЯ ПОЗИЦИОНИРУЮЩАЯ И ВИБРОИЗОЛИРУЮЩАЯ СИСТЕМА | 2010 |
|
RU2443911C1 |
| Амортизатор на основе линейного электродвигателя | 2021 |
|
RU2763617C1 |
| СИНХРОНИЗАТОР ДВИЖЕНИЯ ЯКОРЬ-ПОРШНЕЙ В ПРОТИВОФАЗЕ СВОБОДНОПОРШНЕВОГО НАСОС-ГЕНЕРАТОРА | 2010 |
|
RU2422654C1 |
| ПОГРУЖНОЙ ЛИНЕЙНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2014 |
|
RU2549381C1 |
| ЭЛЕКТРОМАГНИТНЫЙ КЛАПАН (Варианты) | 2016 |
|
RU2625072C1 |
ПНЕВМОЦИЛИНДР, содержащий корпус, в котором с образованием рабочих полостей установлены шток и поршень, имеющий радиальные и осевые каналы управляемые клапаны и стопорное устройство с магнитными приводами, снабженное подвижным магнитопроводом и механизмом возврата, отличающийся тем, что, с целью повышения надежности, механизм возврата выполнен в виде нескольких пар постоянных магнитов, установленных разноименными полюсами навстречу один другому, в каждой из которых один закреплен на поршне, а другой - на магнитопроводе, размещенном в радиальном канале порщня, с возможностью взаимодействия с корпусом и кинематически связан с управляемым клапаном. § (Л о со со ts:)
сриг.г
фие.З
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Пневмоцилиндр | 1976 |
|
SU606015A2 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
