Изобретение относится к области аэродинамических измерений и может быть использовано для измерения составляющих векторов силы и момента, действующих на модели летательных аппаратов, судов, испытываемых в аэродинамических трубах, бассейнах и гидроканалах.
Область применения - авиация, космическая техника, судостроение.
Измерение составляющих векторов аэродинамической силы и момента, действующих на модели летательных аппаратов, является одной из главных задач экспериментальной аэродинамики.
Основным средством измерения, используемым для этой цели, являются многокомпонентные тензометрические весы (см. Энциклопедия Авиации, научное издательство «Большая Российская Энциклопедия» Москва, 1994 г., стр. 134 - Весы аэродинамические, стр. 224 - измерения аэродинамические).
По своей структуре тензометрические весы представляют, как правило, стержневую конструкцию, состоящую из набора функциональных динамометрических элементов (ДЭ), служащих для измерения составляющих векторов силы и момента.
Существует две основные разновидности весов - внутримодельные и внемодельные весы.
У внутримодельных весов все динамометрические элементы располагаются внутри испытываемой модели.
В тех случаях, когда динамометрические элементы не удается разместить внутри модели, их выносят за ее пределы. Такие весы получили название внемодельных. (см. «Датчики и системы» №3, 2004, с. 3, рис. 1, 2, 3).
Основным недостатком внемодельных весов является сравнительно низкая точность измерения основных аэродинамических характеристик летательных аппаратов. Например, такой важной характеристики, как запас продольной статической устойчивости летательного аппарата, определяемый неравенством:
 - координата центра тяжести аппарата, отнесенная к средней аэродинамической хорде (САХ).
- координата центра тяжести аппарата, отнесенная к средней аэродинамической хорде (САХ).
 - относительная координата аэродинамического фокуса.
- относительная координата аэродинамического фокуса.
 - изменение наклона характеристики коэффициента нормальной силы по углу атаки α.
- изменение наклона характеристики коэффициента нормальной силы по углу атаки α.
Точка с координатой XF всегда находится на крыле летательного аппарата. Она является точкой приложения приращения аэродинамической силы ΔY при изменении угла атаки α.
Момент ΔMz от силы ΔY измеряется относительно начала координат (Н.К.) динамометрического элемента, вынесенного за пределы модели. В результате между точками XF и Н.К. существует значительное расстояние, равное  которое служит координатой XF, отсчитываемой от Н.К.
которое служит координатой XF, отсчитываемой от Н.К.
Обычно для весов на средние нагрузки (αF~1000 мм.) относительная погрешность измерения αF по измеренным ΔMz и ΔY составляет порядка ±0,5%, или в абсолютном выражении ±5 мм.
Современные летательные аппараты - истребители, специальные космические аппараты и т.п. обладают малым запасом продольной статической устойчивости. Для них на моделях (XF-XT)=50÷25 мм, тогда относительная погрешность определения запаса продольной статической устойчивости будет составлять ±(10÷20)%, что является недопустимым.
Эффективным способом повышения точности внемодельных весов является перенос начала координат динамометрических элементов ДЭ Mz и ДЭ MY в точку, совпадающую с центром тяжести - ХТ, либо расположенную в непосредственной близости от нее.
Существует созданный в ФГУП «ЦАГИ» динамометрический элемент (см. «Измерительная техника» №11 за 1979 г., стр. 54, рис. 4; Авторское свидетельство №186730, 03.10.1966 г., Бюллетень №19).
Элемент состоит как минимум, из двух внешних балок, расположенных симметрично под углом наклона ϕ к продольной оси, и одной внутренней сигнальной балки, ось которой совпадает с продольной осью весов. Точка пересечения осей внешних балок с продольной осью весов является началом координат Н.К. динамометрического элемента. В корневых сечениях сигнальной балки наклеены тензорезисторы, которые соединены в мостовую схему. Выходной сигнал моста (разбаланс) зависит исключительно от S-образной деформации сигнальной балки. Сила Y, приложенная в начало координат, не вызывает S-образной деформации сигнальной балки и как следствие, разбаланса моста. S-образная деформация и разбаланс моста возникают под действием момента Mz. Изменяя угол наклона балок ϕ, можно задавать требуемое положение начала координат.
Для измерения момента Му используется аналогичный ДЭ Му, выполненный последовательно с ДЭ Mz и развернутый относительно продольной оси на угол  В результате общая длина элементов, не считая жесткого участка между ними, увеличивается вдвое.
В результате общая длина элементов, не считая жесткого участка между ними, увеличивается вдвое.
Использование подобной конфигурации элементов определило относительно широкую область применения внемодельных весов.
Главными недостатками известного решения являются относительно высокая трудоемкость и сложность расчета, ограниченные функциональные возможности, высокая трудоемкость и сложность изготовления, а также высокая металлоемкость таких весов.
За прототип принят созданный в ФГУП «ЦАГИ» динамометрический элемент (Патент РФ на изобретение №2396533, 20.04.2009, МПК G01M 9/06).
Данный элемент состоит из балок, параллельных с общей продольной осью весов, с измерительными мостами из тензорезисторов. Балки упругого шарнира, выполнены переменными по длине таким образом, что количественные значения их длин изменяются по линейному закону в зависимости от расстояния балки до продольной оси упругого шарнира. Высоты балок также изменяются в зависимости от их длины. Причем отношение высот любых двух соседних балок равно отношению квадратов их длин.
Основными недостатками известного решения являются недостаточная точность измерения, ограниченные функциональные возможности, невозможность измерения нескольких компонент нагрузки в одном элементе.
Внемодельные весы представляют собой монолитную стержневую конструкцию, состоящую из последовательно расположенных функциональных динамометрических элементов, количество которых равно числу компонент вектора измеряемой нагрузки. В большинстве случаев это шестикомпонентные весы, у которых последовательно с элементами ДЭ Mz и ДЭ MY расположены ДЭ X, ДЭ Y, ДЭ Z и ДЭ МХ для измерения составляющих векторов сил X, Y, Z и момента МХ. В результате весы получаются слишком большими по длине, и как следствие, падают их жесткость на изгиб и прочность. Падение жесткости приводит к паразитным угловым деформациям, снижающим точность измерения, а падение прочности к ограничению максимальных измеряемых нагрузок, что снижает их (весов) функциональные возможности. Кроме того, угол наклона балок ϕ у весов на большие нагрузки составляет величину 1÷2°, а расстояние αF≈1200 мм., в результате возможная технологическая неточность выполнения угла наклона балок приводит к большому разбросу положения начала координат, что в свою очередь снижает точность измерения аэродинамических нагрузок.
Техническим результатом предполагаемого изобретения является повышение точности измерения составляющих векторов аэродинамической силы и момента многокомпонентными тензометрическими весами, снижение трудоемкости изготовления и металлоемкости весов.
Технический результат достигается тем, что в многокомпонентных тензометрических весах, содержащих динамометрические элементы из балок, параллельных с общей продольной осью весов, с измерительными мостами из тензорезисторов, один из динамометрических элементов является четырехкомпонентным элементом для измерения составляющих векторов аэродинамической силы и момента Y, MZ и Z, MY, который выполнен из двух пар симметричных друг другу балок с продольными ребрами или пакетов балок с продольными ребрами с шагом ребер по окружности 90 градусов, при этом измерительные мосты из тензорезисторов наклеены на ребра, обеспечивающими перенос начала координат в заданную точку на продольной оси весов. Балки динамометрического элемента снабжены ребрами жесткости и продольными разрезами, при этом геометрические параметры сечения балок выбираются так, чтобы выполнялось соотношение, связывающее положение начала координат ХН с длиной балок  и отношением моментов сопротивления балок относительно главной оси сечения
и отношением моментов сопротивления балок относительно главной оси сечения  к моменту сопротивления относительно оси, проходящей через центр тяжести сечения балки Ws как:
к моменту сопротивления относительно оси, проходящей через центр тяжести сечения балки Ws как:
Для более подробного пояснения предполагаемого изобретения рассмотрим конструкцию и принцип действия весов.
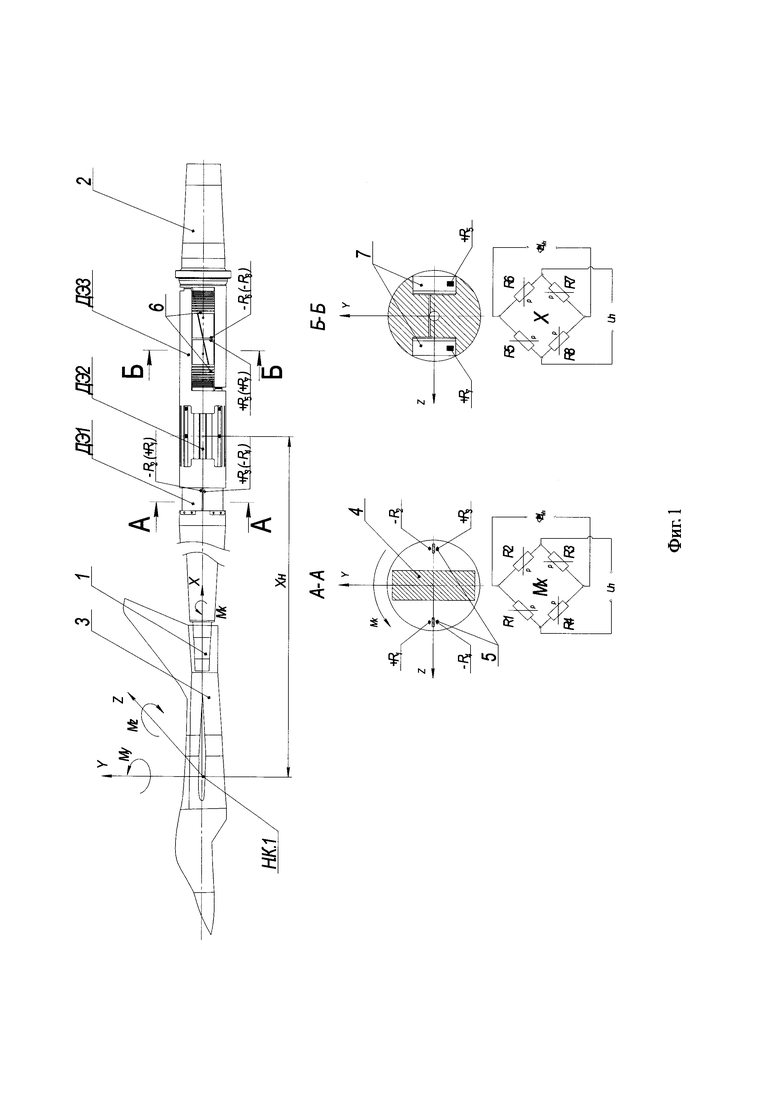
На Фиг. 1 показан чертеж общего вида многокомпонентных тензометрических весов
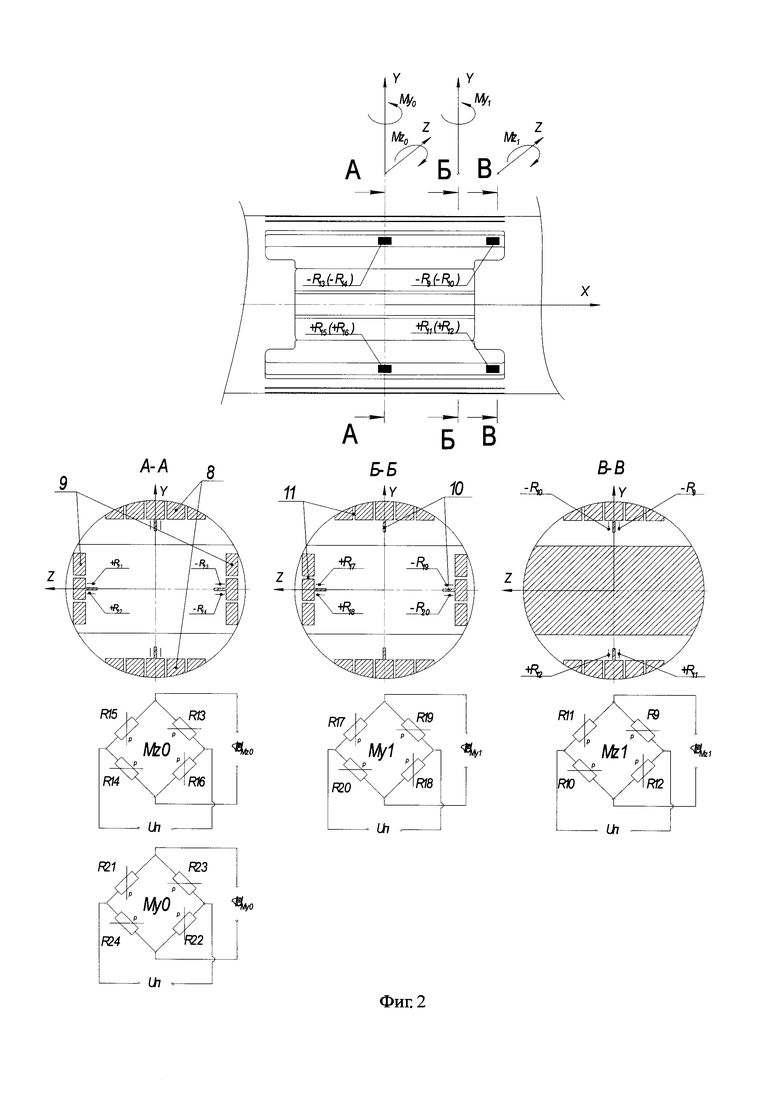
На Фиг. 2 показан чертеж четырехкомпонентного динамометрического элемента
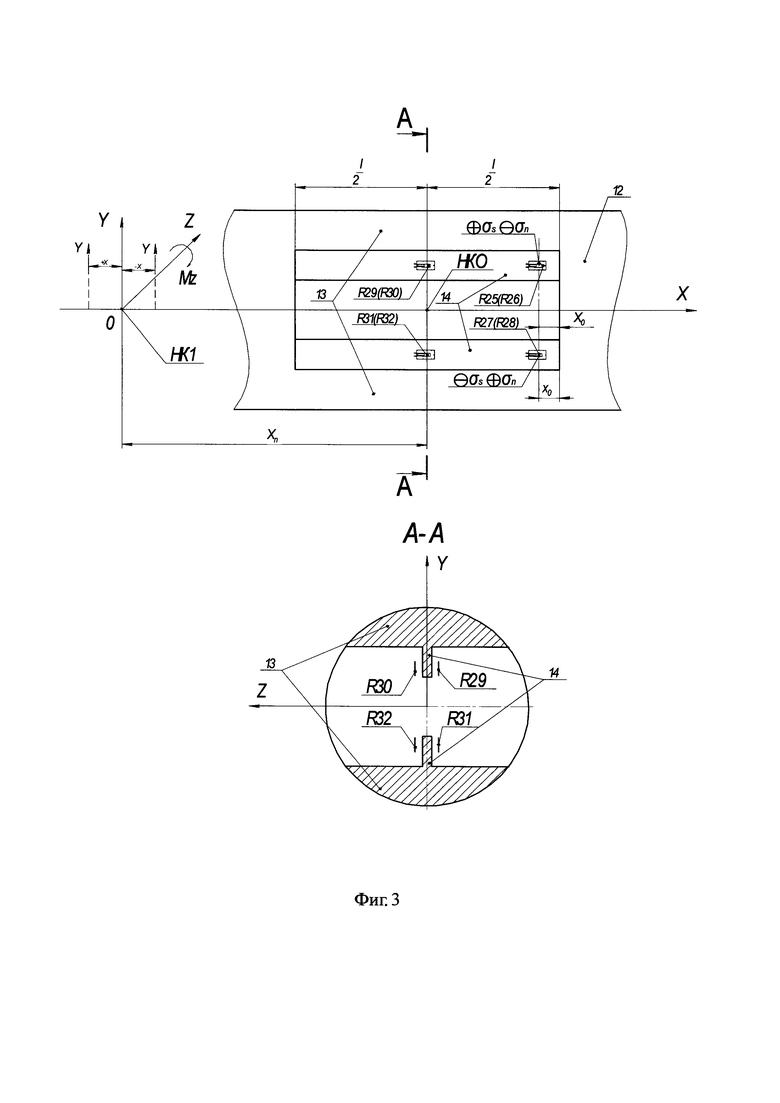
На Фиг. 3 показан чертеж двухкомпонентного динамометрического элемента
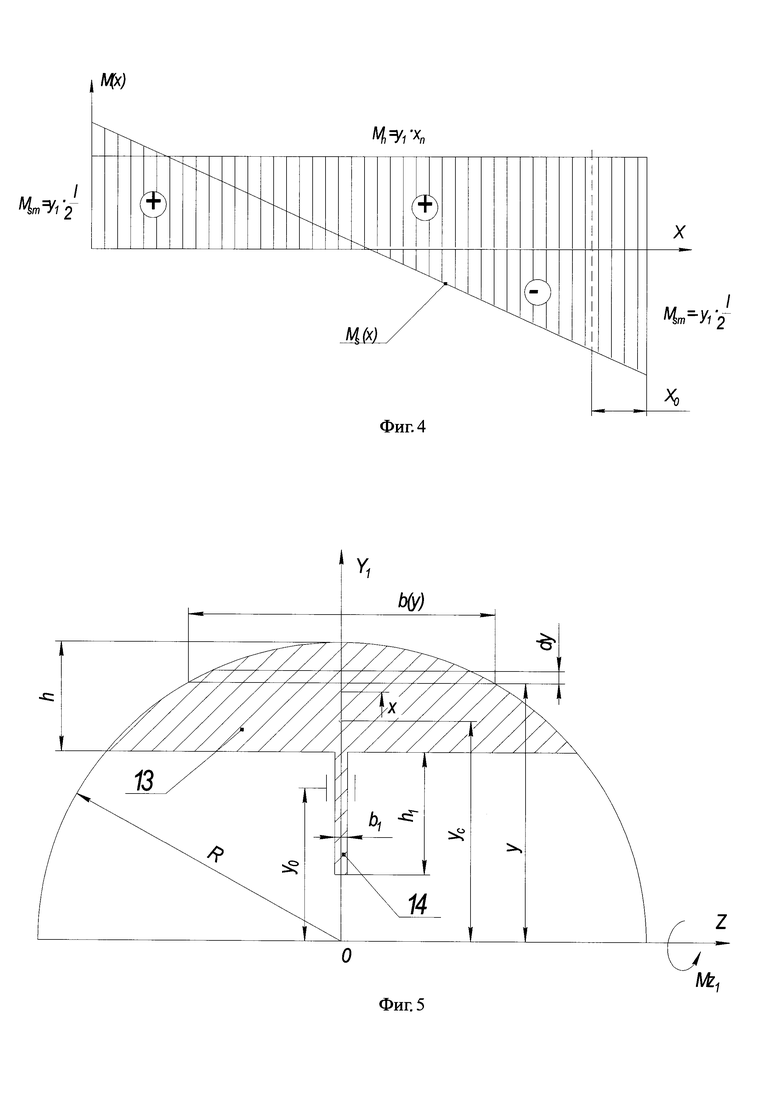
На Фиг. 4 показаны эпюры изгибающих моментов
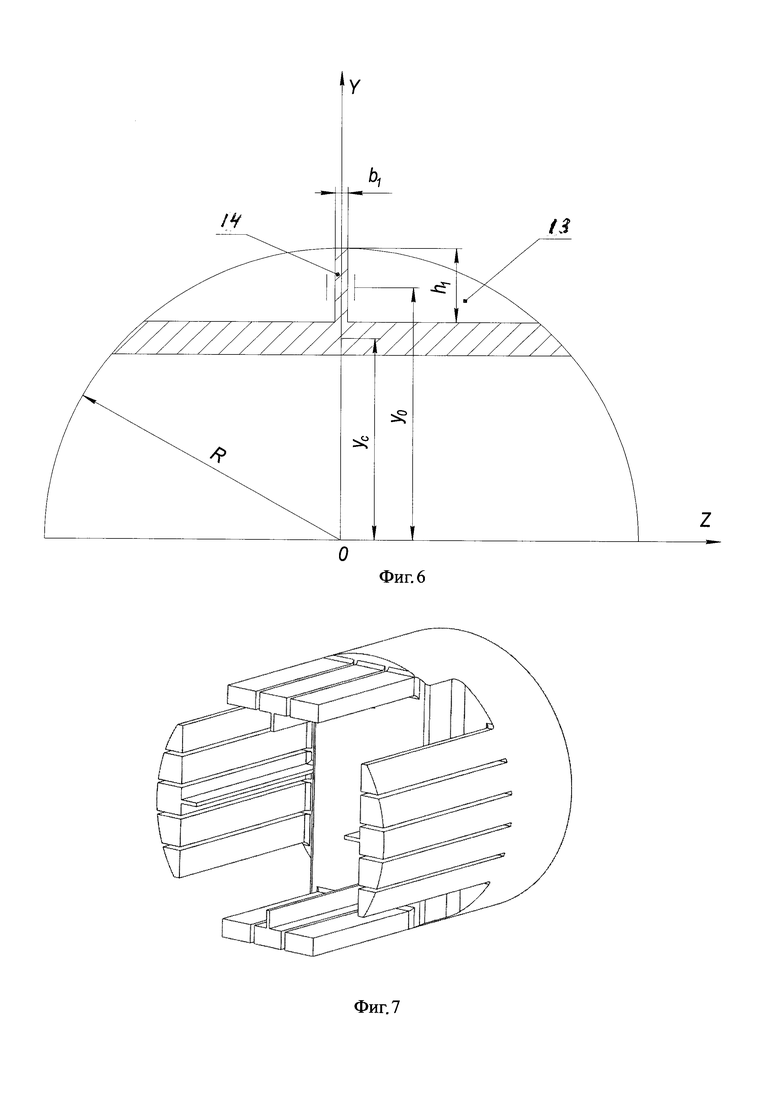
На Фиг. 5 показан чертеж сечения верхней половины динамометрического элемента
На Фиг. 6 показан чертеж сечения с ребром жесткости на внешней стороне балки
На Фиг. 7 показана аксонометрическая проекция динамометрического элемента
Шестикомпонентные внемодельные тензометрические весы (Фиг. 1) состоят из трех динамометрических элементов ДЭ1, ДЭ2, ДЭ3 и двух посадочных конусов - переднего 1 и заднего 2. Динамометрические элементы состоят из балок, параллельных с общей продольной осью весов, с измерительными мостами из тензорезисторов. На переднем посадочном конусе 1 установлена испытываемая модель 3, а при помощи заднего посадочного конуса 2 весы устанавливаются на механизме изменения углового положения модели. В начале координат Н.К.1 на модель действуют составляющие векторов аэродинамической силы X, Y, Z и момента МХ, MY, MZ.
Динамометрический элемент ДЭ1 предназначен для измерения составляющей MX аэродинамического момента. Элемент, сеч. А-А, состоит из центрального тела 4 и двух сигнальных балок 5, в правых корневых сечениях которых наклеены тензорезисторы R1, R2, R3, R4, объединенные в тензометрический мост, с напряжением питания Uп. Выходное напряжение моста ΔUMx пропорционально составляющей момента MX. Знаки перед обозначениями тензорезисторов указывают на знак приращения сопротивления под действием положительного момента.
Динамометрический элемент ДЭ3 предназначен для измерения составляющей аэродинамической силы X.
Элемент состоит из двух пакетов балок 6, являющихся упругими шарнирами и двух сигнальных балок 7 - сеч. Б-Б. В нижних корневых сечениях сигнальных балок наклеены тензорезисторы R5, R6, R7, R8, объединенные в тензометрический мост. Выходное напряжение моста ΔUX, пропорционально силе X.
Динамометрический элемент ДЭ2 предназначен для измерения четырех составляющих векторов аэродинамической силы и момента: Y, MZ и Z, MY.
На Фиг. 2 показан общий вид элемента и три сечения: центральное А-А и два корневых Б-Б и В-В.
Элемент состоит из двух пар симметричных друг другу параллельных балок 8 и 9 в общем случае различной длины, или пакетов балок с продольными ребрами жесткости 10 с шагом ребер по окружности 90 градусов. В балках выполнены продольные разрезы 11. Начало координат НК1 (Фиг. 1) вынесено на расстояние XH от центрального сечения А-А (Фиг. 2), на ребра жесткости 10 в сечениях А-А, Б-Б и В-В наклеены тензорезисторы R9…R24, объединенные в тензометрические мосты. Выходные сигналы мостов пропорциональны моментам, действующим в сечениях А-А, Б-Б и В-В (Фиг. 2). Геометрические параметры сечения и длины балок 8 и 9 или их пакетов выбраны для обеспечения переноса начала координат в заданную точку в соответствии с формулой:
как: 
где хн - требуемое расстояние переноса начала координат весов в заданную точку на продольной оси;
 - длина балок
- длина балок
- момент сопротивления сечения балки или пакета балок относительно продольной оси весов;
Ws - момент сопротивления сечения балки или пакета балок относительно оси, проходящей через центр тяжести сечения
Отличительной особенностью предлагаемых весов является наличие в их составе четырехкомпонентного динамометрического элемента с вынесенным в заданную точку на продольной оси весов началом координат.
Для пояснения принципа действия элемента и способа переноса начала координат рассмотрим более подробно отдельно от общей конструкции весов (Фиг. 1) двухкомпонентный динамометрический элемент (Фиг. 3) для измерения составляющих векторов аэродинамической силы и момента Y и Mz. Аналогичный принцип справедлив и для измерения компонент Z и My.
Элемент (Фиг. 3) состоит из основания 12, двух параллельных балок 13, расположенных симметрично относительно продольной оси X, снабженных ребрами жесткости 14.
В отличие от балок на Фиг. 2 балки на Фиг. 3 не имеют продольных разрезов. Основание 12 и балки 13 представляют монолитную конструкцию. На ребрах жесткости 14 на расстоянии Х0 от правого корневого сечения наклеены тензорезисторы R25(R26), R27(R28), а в центральном сечении А-А, находящемся на расстоянии  от корневого сечения наклеены тензорезисторы R29(R30), R31(R32).
от корневого сечения наклеены тензорезисторы R29(R30), R31(R32).
Тензорезисторы, с номерами, указанными в скобках, расположены на обратной стороне ребер 14 симметрично относительно тензорезисторов, находящихся на видимой стороне.
Собственное (конструктивное) начало координат динамометрического элемента НК0 находится в точке пересечения продольной оси с плоскостью центрального сечения. В точке на расстоянии Хн от плоскости центрального сечения находится вынесенное начало координат НК1, в котором действуют сила Y и момент MZ.
Положим MZ=0 и рассмотрим действие силы Y на динамометрический элемент.
На Фиг. 4 показаны эпюры изгибающих моментов, приведенные к одной (нижней) балке 13.
Постоянный по длине балки момент:

Момент  вызывает растяжение нижней балки. Y1 - сила приведенная к нижней балке:
вызывает растяжение нижней балки. Y1 - сила приведенная к нижней балке: 
Переменный по длине балки момент:

Момент MS(x) инициирует S-образный изгиб балок.
Обозначим коэффициент снижения момента, обусловленный смещением тензорезисторов на величину х0 от корневого сечения через  тогда значение момента MS в месте расположения тензорезисторов:
тогда значение момента MS в месте расположения тензорезисторов:

В сечении х0 на ребре 14 нижней балки 13 момент MS отрицательный, а момент  положительный.
положительный.
Напряжение в этом сечении:

На верхней балке наблюдается обратная картина:

 - момент сопротивления сечения нижней балки (Фиг. 3) относительно горизонтальной оси Z.
- момент сопротивления сечения нижней балки (Фиг. 3) относительно горизонтальной оси Z.
WS - момент сопротивления сечения нижней балки (Фиг. 3) относительно горизонтальной оси, проходящей через центр тяжести сечения.
Сигнальные напряжения σс под тензорезисторами R1…R4 (Фиг. 3) равно сумме напряжений:

По определению сигнальное напряжение от силы Y, приложенной в начале координат НК1, должно равняться нулю. Полагая σΣ=0 с учетом (4) и (6) получим:

Откуда

Обычно положение начала координат (xн) задается в качестве исходного при проектировании весов.
Учитывая, что всегда λ<1, а возможности изменения длины балки  ограничены особое значение при варьировании положения начала координат приобретает отношение моментов сопротивления, входящее в (8). С целью анализа возможностей изменения данного отношения рассмотрим сечение (Фиг. 5) - верхняя половина динамометрического элемента (Фиг. 3).
ограничены особое значение при варьировании положения начала координат приобретает отношение моментов сопротивления, входящее в (8). С целью анализа возможностей изменения данного отношения рассмотрим сечение (Фиг. 5) - верхняя половина динамометрического элемента (Фиг. 3).
Обозначения размеров элементов сечения указаны на чертеже.
Через yc обозначена координата центра тяжести сечения, а через y0 координата наклейки тензорезисторов - точка измерения напряжений σs и 
Учитывая, что:
Для xн получим выражение:

 - момент инерции сечения (Фиг. 5) относительно горизонтальной оси Z.
- момент инерции сечения (Фиг. 5) относительно горизонтальной оси Z.
Is - момент инерции сечения относительно горизонтальной оси, проходящей через центр тяжести сечения.
Изменяя в соответствии с (9) y0 от y01=R-h до

можно в широких пределах изменять положение начала координат xн. Пределы изменения, как следует из (10), определяются относительно ребра жесткости h1.
С целью расширения функциональных возможностей динамометрического элемента на Фиг. 6 приведено сечение, у которого в отличие от сечения на Фиг. 5 ребро жесткости 14 находится на внешней стороне 13.
Положение начала координат для такого сечение описывается выражением:

На Фиг. 7 в целях наглядности приведена аксонометрическая проекция динамометрического элемента с осрезанным верхом.
Зависимости, необходимые для расчета положения начала координат элемента на Фиг. 5:
S=S0+S1 - площадь сечения (Фиг. 5),
где  - площадь сегмента,
- площадь сегмента,
S1=b1⋅h1 - площадь сечения ребра жесткости,
 - переменный по длине поперечный размер сегментальный части сечения,
- переменный по длине поперечный размер сегментальный части сечения,
y - текущая координата Фиг. 5
 - координата центра тяжести сечения,
- координата центра тяжести сечения,
 - координата центра тяжести сегментальной части сечения,
- координата центра тяжести сегментальной части сечения,
 - координата центра тяжести ребра жесткости,
- координата центра тяжести ребра жесткости,
 - момент инерции сечения относительно горизонтальной оси Z,
- момент инерции сечения относительно горизонтальной оси Z,
 - момент инерции сегментальной части сечения, координаты центра тяжести сечения
- момент инерции сегментальной части сечения, координаты центра тяжести сечения
 - момент инерции ребра жесткости,
- момент инерции ребра жесткости,
IS=IS0+IS1+IS2 - момент инерции сечения относительно параллельной оси, проходящей через центр тяжести сечения,

x - координата, отслеживаемая от центра тяжести сечения,

 - переменные по длине поперечные размеры сегментальных частей сечения,
- переменные по длине поперечные размеры сегментальных частей сечения,
 - момент инерции ребра жесткости относительно центра тяжести сечения.
- момент инерции ребра жесткости относительно центра тяжести сечения.
Рассмотрим практический пример.
Зададим xн=1500 мм. В качестве исходных данных полученных в результате расчета динамометрического элемента найдены следующие величины:
R=75 мм, l=200 мм, h=16 мм, λ=0,88.
Используя расчетные значения для Фиг. 5 получим:
b1=3 мм, h1=38 мм, y0=46 мм, yc=62,88 мм, 
ISZ=9,797⋅106 мм4, xн=1499 мм.
Важным преимуществом предлагаемого динамометрического элемента по сравнению с изложенным является возможность наряду с моментом тангажа MZ измерять нормальную силу Y, а также наряду с моментом рысканья MY поперечную силу Z. В результате вместо двух компонент MZ и MY, в известном решении, удается разместить в одном моноблоке четыре компонента (Y, MZ, Z, MY) с сохранением функциональных возможностей весов.
Для пояснения указанного преимущества вернемся к схеме Фиг. 3, на которой пунктиром показана сила Y, отстоящая на ±х от начала координат (НК1).
Уравнение моментов относительно НК1 и НК0 имеет вид:

Откуда:

Отметим, что расстояние xн определяется экспериментально на градуировочном стенде при калибровке динамометрического элемента.
Моменты М0 и М1 измеряются в процессе эксперимента. Суммарный момент М1 действующий относительно НК1 дается первым уравнением (12).
В приведенном на Фиг. 2 сечении А-А динамометрического элемента балки 8 и 9 снабжены продольными разрезами на всем своем протяжении. Такие надрезы снижают жесткость пакета балок 8 в направлении оси Z и балок 9 в направлении оси Y. В результате увеличиваются приведенные к балкам 8 и 9 измеряемые силы Y и Z.
Обозначим коэффициенты жесткости одной балки в направлении осей Y и Z через C8Y и C8Z, а балки 9 в направлении осей Z и Y через C9Z и C9Y соответственно. Тогда сила Y1 приведенная к одной балке 8 будет равна:

Сила Z1 приведенная к одной балке 9:

Разрезы слабо влияют на коэффициент жесткости C8Y балки 8 и в разы снижают коэффициент жесткости C9Y балки 9. Аналогично коэффициент жесткости C8Z балки 8 снижается, а коэффициент жесткости C9Z слабо изменяется. В результате силы Y1 и Z1 приведенные к балкам 8 и 9 увеличиваются.
Коэффициенты жесткости балок 8 и 9 с n-1 разрезами выражаются общей зависимостью:

где
 - количество отдельных балок,
- количество отдельных балок,
ISi - момент инерции i-той балки относительно оси, проходящей через центр тяжести,
 - длина i-той балки.
- длина i-той балки.
Моменты MZ0 и MY0 (Фиг. 2) практически без потерь приходят к балкам 8 и 9 соответственно. Последнее объясняется тем, что коэффициент угловой жесткости балок 8 относительно оси Z в значительное число раз превосходит соответствующий коэффициент балок 9.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДИНАМОМЕТРИЧЕСКИЙ ЭЛЕМЕНТ | 2009 |
|
RU2396533C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СОСТАВЛЯЮЩИХ ВЕКТОРОВ АЭРОДИНАМИЧЕСКОЙ СИЛЫ И МОМЕНТА | 2005 |
|
RU2287795C1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ СТАТО - ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ФИЗИЧЕСКИХ ОБЪЕКТОВ | 2013 |
|
RU2562445C2 |
| ТЕНЗОМЕТРИЧЕСКИЕ ВЕСЫ | 2015 |
|
RU2599906C1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССЫ, КООРДИНАТ ЦЕНТРА МАСС И МОМЕНТОВ ИНЕРЦИИ ИЗДЕЛИЯ | 2012 |
|
RU2506551C2 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССЫ, КООРДИНАТ ЦЕНТРА МАСС И ТЕНЗОРА ИНЕРЦИИ ИЗДЕЛИЯ | 2010 |
|
RU2434213C1 |
| ПЯТИКОМПОНЕНТНЫЕ ТЕНЗОВЕСЫ | 2015 |
|
RU2595321C1 |
| Устройство для измерения составляющих векторов аэродинамической силы и момента | 2017 |
|
RU2657340C1 |
| ТЕНЗОМЕТРИЧЕСКИЕ ВЕСЫ | 2005 |
|
RU2287783C1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССО-ИНЕРЦИОННЫХ ХАРАКТЕРИСТИК ИЗДЕЛИЯ | 2013 |
|
RU2562273C2 |
Изобретение относится к области аэродинамических измерений и может быть использовано для измерения составляющих векторов силы и момента, действующих на модели летательных аппаратов, судов, испытываемых в аэродинамических трубах, бассейнах и гидроканалах. Многокомпонентные тензометрические весы содержат динамометрические элементы из балок, параллельных с общей продольной осью весов, с измерительными мостами из тензорезисторов, в которых один из динамометрических элементов - четырехкомпонентный для измерения составляющих векторов силы и момента Y, MZ и Z, MY - выполнен из двух пар симметричных друг другу балок с продольными ребрами или пакетов балок с продольными ребрами с шагом ребер по окружности 90 градусов, при этом измерительные мосты из тензорезисторов наклеены на ребра, а геометрические параметры сечения и длины балок или их пакетов выбраны для обеспечения переноса начала координат в заданную точку в соответствии с формулой. В балках выполнены продольные разрезы. Технический результат заключается в повышении точности измерения составляющих векторов аэродинамической силы и момента многокомпонентными тензометрическими весами, снижение трудоемкости изготовления и металоемкости весов. 1 з.п. ф-лы, 7 ил.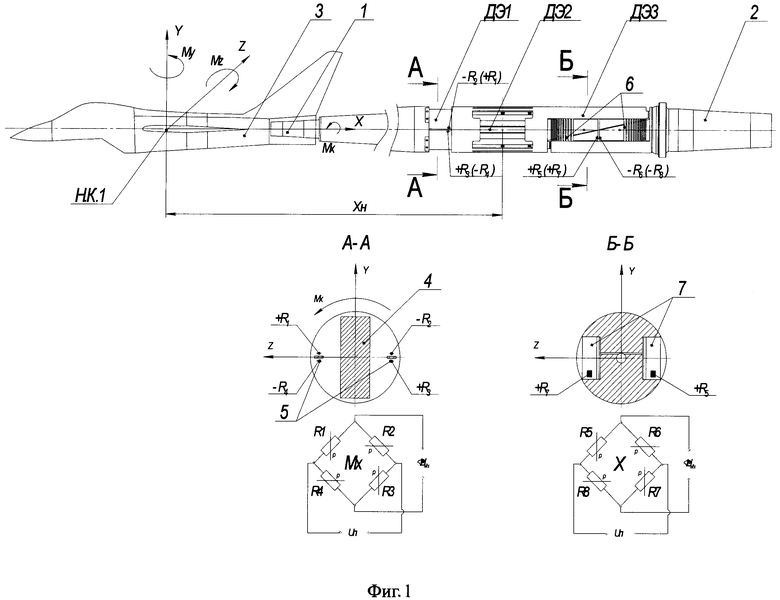
1. Многокомпонентные тензометрические весы, содержащие динамометрические элементы из балок, параллельных с общей продольной осью весов, с измерительными мостами из тензорезисторов, отличающиеся тем, что один из динамометрических элементов - четырехкомпонентный для измерения составляющих векторов силы и момента Y, MZ и Z, MY - выполнен из двух пар симметричных друг другу балок с продольными ребрами или пакетов балок с продольными ребрами с шагом ребер по окружности 90 градусов, при этом измерительные мосты из тензорезисторов наклеены на ребра, а геометрические параметры сечения и длины балок или их пакетов выбраны для обеспечения переноса начала координат в заданную точку в соответствии с формулой
где xн - требуемое расстояние переноса начала координат весов в заданную точку на продольной оси;
 - длина балок;
- длина балок;
 - момент сопротивления сечения балки или пакета балок относительно продольной оси весов;
- момент сопротивления сечения балки или пакета балок относительно продольной оси весов;
Ws - момент сопротивления сечения балки или пакета балок относительно оси, проходящей через центр тяжести сечения.
2. Многокомпонентные тензометрические весы по п. 1, отличающиеся тем, что в балках выполнены продольные разрезы.
| ДИНАМОМЕТРИЧЕСКИЙ ЭЛЕМЕНТ | 2009 |
|
RU2396533C1 |
| Устройство для измерения составляющих векторов аэродинамической силы и момента | 2017 |
|
RU2657340C1 |
| СПОСОБ ПОЛУЧЕНИЯ ГИПЕРИНА | 0 |
|
SU152542A1 |
| ПЯТИКОМПОНЕНТНЫЕ ТЕНЗОВЕСЫ | 2015 |
|
RU2595321C1 |
| Многокомпонентный динамометр | 1981 |
|
SU1015318A1 |
| US 4107986 A1 22.08.1978. | |||

