СО
СА:)
01
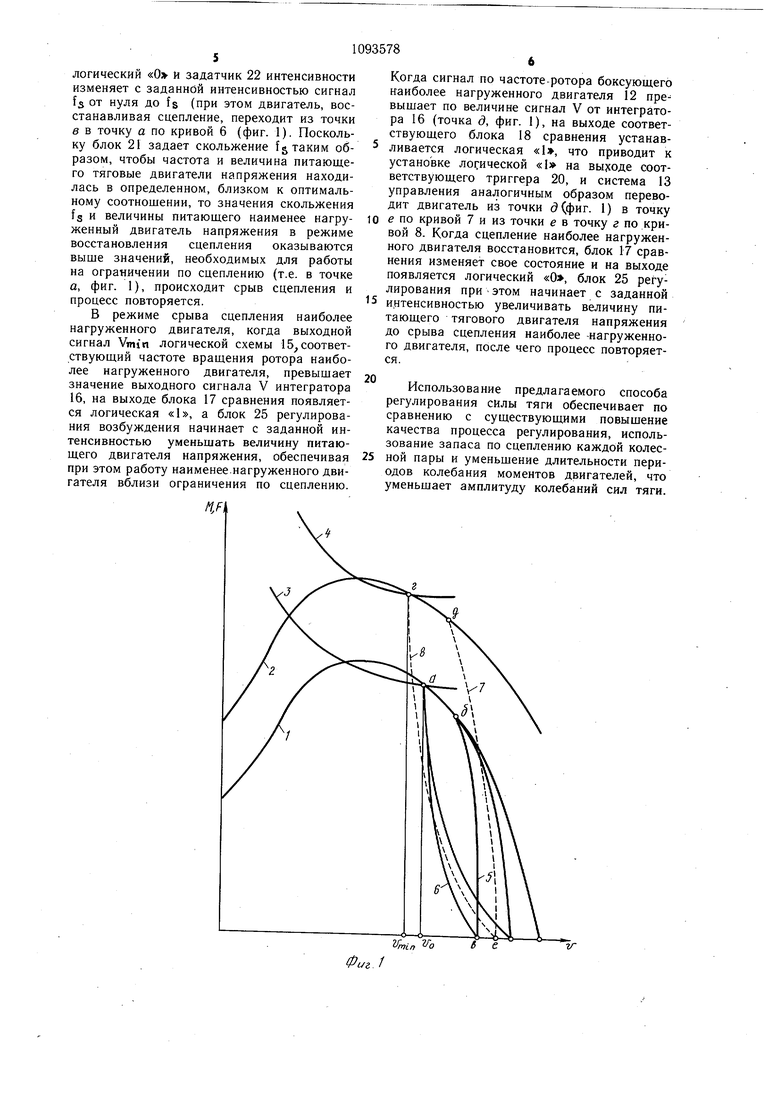
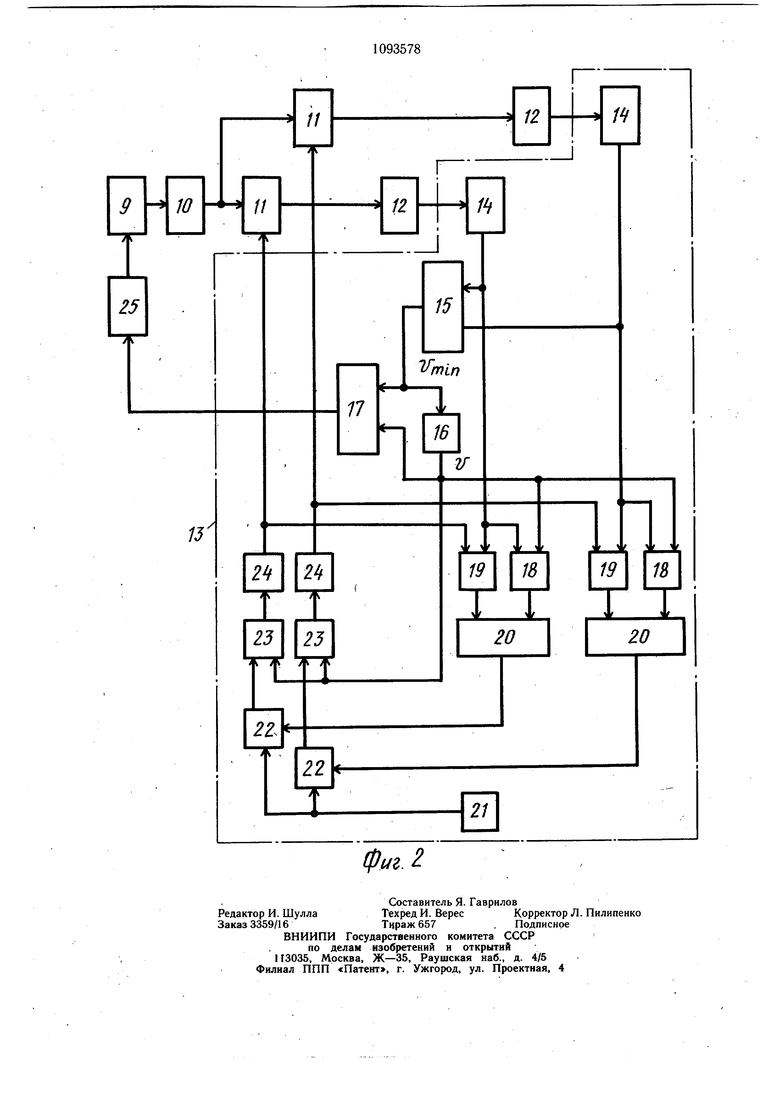
00 Изобретение относится к железнодорожному транспорту и может быть использовано на локомотиве с автономным источником питания и тяговыми двигателями переменного тока. Известен способ регулирования силы тяги локомотива с автономным источником питания, заключающийся в том, что регулируют величину напряжения источника питания, выделяют сигналы, пропорциональные нагрузкам тяговых двигателей, сравнивают их, выделяют сигнал, пропорциональный избыточному скольжению тягового двигателя с минимальной нагрузкой, и сравнивают величину этого сигнала с допустимым значением 1. Недостаток способа состоит в том, что регулирование силы- .тяги ведется вблизи ограничения посцеплению наименее нагруженного двигателя, при этом не исаользуется запас по сцеплению наиболее нагруженных двигателей, что снижает качество процесса регулирования и, как следствие, надежность pa6oTbf системы. Цель изобретения - повыщение надежности способа. Поставленная цель достигается тем, что согласно способу регулирования силы тяги локомотива с автономным источником питания, заключающемуся в том, что регулируют величину напряжения источника питания, выделяют сигналы, пропорциональные нагрузкам тяговых двигателей, сравнивают их и выделяют сигнал, пропорциональный избыточному скольжению тягового двигателя с минимальной нагрузкой, и сравнивают величину этого сигнала с допустимым значением, выделяют сигнал, пропорциональный избыточному скольжению тягового двигателя с максимальной нагрузкой, увеличивают величины напряжения источника питания и частоты напряжения, подводимого к каждому тяговому двигателю, до уровней, при которых величины сигналов, пропорциональных избыточным скольжениям тяговых двигателей с максимальной и минимальной нагрузками, превысят допустимые.значения, после чего понижают величины напряжения источника питания и частоты напряжения, подводимого к каждому тяговому двигателю, до исчезновения избыточного скольжения. На фиг. 1 представлены механические характеристики тяговых асинхронных двигателей (кривые 1 и 2 - механические характеристики наименее и наиболее нагруженных тяговых асинхронных двигателей, кривые 3 и 4 - зависимость силы тяги F от поступательной скорости локомотива V на границе по сцеплению наименее и наиболее нагруженных двигателей, кривые 5-8 - пере одные механические характеристики асинхронных двигателей); на фиг. 2 - блоксхема устройства, реализующего способ; регулирования си1лы тяги локомотива с автономным источником питания. Способ регулирования силы тяги локомотива с автономным источником питания заключается в следующем. Повыщак)т величину питающего напряжения до срыва сцепления наиболее нагруженного двигателя, а частоту питающего напряжения - до срыва сцепления наименее нагруженного двигателя. Как только. происходит срыв сцепления наименее нагруженного двигателя, работавц1его до этого в точке а, двигатель из точки а переходит в точку б, где частота питающего напряжения, запитывающего наименее нагруженный двигатель, по сигналу датчиков проскальзывания начинает снижаться и двигатель из точки б переходит в точку в по кривой, характер которой зависит от интенсивности снижения частоты питающего напряжения. В точке в частота вращения ротора достигает синхронной и момент М снижается до нуля, боксование прекращается и двигатель возвращается из точки в в точку а по кривой 6, характер которой зависит от регулирования частоты питающего напряжения в режиме восстановления сцепления. При превыщении частоты питающего напряжения в процессе восстановления сцепления над частотой, соответствующей работе двигателя на границе по сцеплению, происходит срыв сцепления и процесс повторяется. В режиме боксования наименее нагруженного двигателя величина питающего напряжения повыщается до срыва сцепления наиболее нагруженного двигателя, причем частота напряжения, запитывающего наиболее нагруженный двигатель, системой автоматического регулирования ( в контуре регулирования частоты вращения ротора наиболее нагруженного двигателя) приводится в соответствие с величиной напряжения. Как только частота и величина напряжения, питающего наиболее нагруженный двигатель, превысят значения, соответствующие работе его на границе по сцеплению (в точке г), происходит срыв сцепления (боксование наиболее нагруженного двигателя) и двигатель из точки г по кривой 2 переходит в точку д, где по сигналу датчиков проскальзывания величина питающего напряжения начинает снижаться, обеспечивая работу наименее нагруженного двигателя вблизи ограничения по сцеплению и способствуя защите от боксования наиболее нагруженного двигателя, а частота питающего наиболее нагруженный двигатель напряжения, снижаясь, обеспечивает защиту его от боксования. При этом двигатель из точки д переходит в точку е по кривой 7, характер которой зависит от интенсивности снижения частоты и величины йитающего напряжения. и из точки е в точку г по кривой 8, характер которой зависит от регулироваиия частоты и величины питающего напряжения в режиме восстановления сцепления. При превышении значений частоты и величины питающего напряжения в процессе их повышения над значениями, соответствующими работе наиболее нагруженного двигателя в точке г, происходит срыв сцепления наиболее нагруженного двигателя и процесс повторяется. Предлагаемый способ обеспечивает регулирование силы тяги каждого тягового двигателя вблизи ограничения по сцеплению и уменьщения длительности периодов колебания моментов двигателей, за счет чего повышается надежность работы системы. Устройство, реализующее предлагаемый способ, содержит главный генератор 9, к, которому через выпрямитель 10 и преобразователи 11 частоты подключены асинхронные тяговые двигатели 12. К преобразователям 11 частоты подключена система 13 управления, состоящая из датчиков 14 частоты вращения роторов двигателей 12, логической схемы 15 выбора минимального сигнала, по частоте вращения роторов двигателей 12, интегратора 16, блоков 17-19 сравнения, триггеров 20, блока 21 задания скольжения, задатчиков 22 интенсивности, сумматоров 23, блоков 24 формирования импульсов управления вентилями преобразователей 11 частоты, и блок 25 регулирования возбуждения главного генератора 9, вход которого соединен с выходом блока 17 сравнения,f Устройство работает следующим образом. Сигналы от датчиков 14 поступают на входы логической схемы 15 и первые входы соответствующих блоков 18 и 19 сравнения. Логическая схема 15 выбирает минимальный сигнал от датчиков 14, соответствующий частоте вращения ротора наиболее нагруженного двигателя, и подает его на вход интегратора 16 и на первый вход блока 17 сравнения. Поскольку для наиболее нагруженного двигателя возможен режим боксования, то выходной сигнал интегратора 16 (V) более точно соответствует поступательной скорости тепловоза, чем выходной сигнал логической схемы 15 ( Vmin ) - Выходной сигнал V интегратора 16 поступает на первые входы сумматора 23 и на вторые входы блоков 17 и 18 сравнения, работающих в режиме компаратора, т.е. при превышении величины частотных сигналов, поступающих на первые входы блоков сравнения, над сигналом V, поступающим на вторые входьь блоки 17 и 18 сравнения формируют на выходе логическую «1, а при равенстве вели.чин входных сигналов и превышении сигнала V над величинами частотных сигналов, поступающих на первые входы, блоки сравнения формируют логический «О. Блоки 19 сравнения, на вторые входы которых поступают частотные сигналы от блоков 24, соответствующие частоте питающего соответствующий двигатель 12 напряжения, работают в режиме компаратора таким образом, что при равенстве величин входных сигналов на выходе формируется логическая «1 , а при неравенстве величин входных сигналов - логический «О. Выходные сигналы блоков 18 сравнения поступают на одни входы, а выходные сигналы блоков 19 сравнения - на другие входы соответствующих триггеров 20, выходные сигналы которых поступают на управляющие входы соответствующих задатчиков 22 интенсивности. Задатчик 22 интенсивности работает в режиме ключа, пропуская сигнал f от блока 21задания скольжения без изменений, если от соответствующего триггера 20 поступает логический «О, и запрещает прохождение сигнала fj при логической «I. При смене сигнала на управляющем входе задатчик 22интенсивности изменяет сигнал fj с заданной постоянной времени от fg до нуля или от нуля до fg соответственно. В сумматорах 23 сигнал от интегратора 16 суммируется с сигналом fs блока 21 и подается на вход соответствующих блоков 24, которые обеспечивают частоту формирования тактовых импульсов управления вентилей преобразователей 11 частоты. Блок 25 регулирования возбуждения работает таким образом, что, когда блок 17 сравнения формирует на выходе логический «О или логическую «1, блок 25 регулирования возбуждения главного генератора 9 увеличивает или соответственно уменьшает с заданной интенсивностью величину питающего тяговые двигатели напряжения. В исходном состояйии на выходах триггеров 20 устанавливается логический «О. В режиме срыва сцепления наименее нагруженного двигателя, когда сигнал по частоте ротора боксующего двигателя 12 превь|шает по величине сигнал V от интегратора 16 (точка б, фиг. 1) на выходе соответствующего блока 18 сравнения устанавливается логическая «IX которая поступает на один вход соответствующего триггера 20, что приводит к появлению логической «1 на его выходе, которая поступает на управляющий вход соответствующего задатчика 22 интенсивности, который уменьшает с заданной интенсивностью сигнал fg от блока 21 до нуля (при этом двигатель из точки б переходит в точку в по кривой 5 (фиг. 1). Как только частота вращения ротора боксующего двигателя становится равной синхронной (точка в, фиг. 1), на выходе блока 19 .сравнения появляется логическая «1, которая поступает на другой вход соответствующего триггера 20, на выходе которого устанавливается при этом логический «О и задатчик 22 интенсивности изменяет с заданной интенсивностью сигнал fs от нуля до fs (при этом двигатель, восстанавливая сцепление, переходит из точки в в точку а по кривой 6 (фиг. 1). Поскольку блок 21 задает скольжение fg таким образом, чтобы частота и величина питающего тяговые двигатели напряжения находилась в определенном, близком к оптимальному соотношении, то значения скольжения fg и величины питающего наименее нагруженныи двигатель напряжения в режиме восстановления сцепления оказываются выше значений, необходимых для работы на ограничении по сцеплению (т.е. в точке а, фиг. 1), происходит срыв сцепления и процесс повторяется. В режиме срыва сцепления наиболее нагруженного двигателя, когда выходной сигнал Vmin логической схемы 15,соответствующий частоте вращения ротора наиболее нагруженного двигателя, превышает значение выходного сигнала V интегратора 16, на выходе блока 17 сравнения появляется логическая «1, а блок 25 регулирования возбуждения начинает с заданной интенсивностью уменьшать величину питающего двигателя напряжения, обеспечивая при этом работу наименее нагруженного двигателя вблизи ограничения по сцеплению. Когда сигнал по частоте ротора боксующего наиболее нагруженного двигателя 12 превышает по величине сигнал V от интегратора 16 (точка д, фиг. 1), на выходе соответствующего блока 18 сравнения устанавливается логическая «1, что приводит к установке ло1;ической «I на соответствующего триггера 20, и система 13 управления аналогичным образом переводит двигатель из точки ((фиг. 1) в точку е по кривой 7 и из точки е в точку г по кривой 8. Когда сцепление наиболее нагруженного двигателя восстановится, блок 17 сравнения изменяет свое состояние и на выходе появляется логический «О, блок 25 регулирования приэтом начинает с заданной интенсивностью увеличивать величину питающего тягового двигателя напряжения до срыва сцепления наиболее -нагруженного двигателя, после чего процесс повторяется. Использование предлагаемого способа регулирования силы тяги обеспечивает по сравнению с существующими повышение качества процесса регулирования, использование запаса по сцеплению каждой колесной пары и уменьшение длительности периодов колебания моментов двигателей, что уменьшает амплитуду колебаний сил тяги.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для защиты от боксования транспортного средства с асинхронными двигателями | 1979 |
|
SU863435A1 |
| ЧАСТОТНО-УПРАВЛЯЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2007 |
|
RU2359400C2 |
| Устройство для регулирования силы тяги и торможения электроподвижного состава при автоматическом управлении | 2019 |
|
RU2739552C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧИ ТЕПЛОВОЗА | 1998 |
|
RU2130389C1 |
| Устройство для регулирования тока возбуждения тягового генератора | 1975 |
|
SU524717A1 |
| Способ регулирования электрической передачи тепловоза | 2020 |
|
RU2729865C1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ОТ БОКСОВАНИЯ И ЮЗА КОЛЕСНЫХ ПАР ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 1991 |
|
RU2025310C1 |
| Способ защиты от боксования тяговых асинхронных двигателей транспортного средства | 1983 |
|
SU1184707A1 |
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ОТ БОКСОВАНИЯ КОЛЕСНЫХ ПАР ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2013 |
|
RU2540223C1 |
| СПОСОБ УПРАВЛЕНИЯ ТЯГОВЫМ ЭЛЕКТРОПРИВОДОМ ЛОКОМОТИВА НА ПРЕДЕЛЕ ПО СЦЕПЛЕНИЮ КОЛЕС С РЕЛЬСАМИ | 2010 |
|
RU2446063C2 |
СПОСОБ РЕГУЛИРОВАНИЯ СИЛЫ ТЯГИ ЛОКОМОТИВА С АВТОНОМНЫМ ИСТОЧНИКОМ ПИТАНИЯ, заключающийся в том, что регулируют величину напряжения источника питания, выделяют сигналы, пропорциональные нагрузкам тяговых двигателей, сравнивают их, выделяют сигнал, пропорциональный избыточному скольжению тягового двигателя с минимальной нагрузкой, и сравнивают величину этого сигнала с допустимым значением, отличающийся тем, что, с целью повышения его надежности, выделяют сигнал, пропорциональный избыточному скольжению тягового двигателя с максимальной нагрузкой, увеличивают величины напряжения источника питания и частоты напряжения, подводинюго к каждому тяговому двиг-ателю, до уровней, при которых величины сигналов, пропорциональных избыточным скольжениям тяговых двигателей с максимальной и минимальной нагрузками, превысят допустиTSS мые значения, после чего понижают ьеличины напряжения источника питания и частоты напряжения, подводимого к каждому тяговому -двигателю, до исчезновения избыточного скольжения.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Нестеров Э | |||
| И | |||
| и др | |||
| Способы улучшения использования сцепного веса локомотивов применением противобоксовочных систем | |||
| :- «Новости зарубежного тепловозостроения, сер | |||
| «Транспортное оборудование, (НИИинформтяжмаш), 1976, № 31, с | |||
| Нивелир для отсчетов без перемещения наблюдателя при нивелировании из средины | 1921 |
|
SU34A1 |
