Изобретение относится к рельсовым транспортным средствам и непосредственно касается асинхронных тяговых приводов локомотивов.
Известен частотно-управляемый асинхронный электропривод [Пат. 2194355 РФ. Частотно-управляемый асинхронный электропривод / М.В.Загорский, В.И.Воробьев, А.И.Ивахин, Г.С.Михальченко], содержащий электродвигатель, который снабжен не менее чем двумя дуговыми обмотками статора и механически связан с колесной парой, установленной на рельсах, а также датчик скорости электродвигателя и систему регулирования, состоящую из статического преобразователя частоты с автономными инверторами, каждый из которых подключен к отдельной дуговой обмотке статора, и блока управления преобразователем, имеющего обратную связь по датчику скорости и прямую связь со статическим преобразователем частоты. При этом токи автономных инверторов сдвинуты друг относительно друга на угол, определяемый числом дуговых обмоток статора.
К недостаткам указанного технического решения относится нерегулируемый угол смещения токов питания дуговых обмоток статора, что не позволяет управлять касательной силой тяги привода при возникновении процесса боксования колесной пары.
Техническим результатом изобретения является повышение тяговых качеств привода в условиях ограниченного сцепления колесной пары и рельсов путем регулирования угла смещения токов питания дуговых обмоток статора.
Технический результат достигается тем, что электропривод содержит электродвигатель, который снабжен не менее чем двумя дуговыми обмотками статора и механически связан с колесной парой, установленной на рельсах, а также датчик скорости электродвигателя и систему регулирования, состоящую из статического преобразователя частоты с автономными инверторами, каждый из которых подключен к отдельной дуговой обмотке статора, и блока управления преобразователем, имеющего обратную связь по датчику скорости и прямую связь со статическим преобразователем частоты. Система регулирования посредством блока управления статическим преобразователем частоты формирует сигналы управления инверторами по алгоритму с однократной на периоде коммутацией силовых элементов, обеспечивает изменение частоты напряжений на выходах автономных инверторов и сдвиг токов инверторов относительно друг друга на угол, определяемый числом дуговых обмоток. При этом блок управления статическим преобразователем частоты снабжен устройством измерения ускорения вращения электродвигателя, связанным с датчиком скорости электродвигателя и фиксирующим возникновение и окончание процесса боксования колесной пары, а также регулятором угла смещения токов дуговых обмоток статора, которое по сигналам, поступающим от устройства измерения ускорения вращения электродвигателя, обеспечивает в режиме боксования колесной пары уменьшение угла смещения токов питания дуговых обмоток в диапазоне, определяемом числом дуговых обмоток статора.
Изложенная сущность изобретения поясняется чертежом.
Электропривод содержит (фиг.1) электродвигатель 1 с дуговыми обмотками 2 статора (в качестве примера на фиг.1 изображен электропривод с тремя дуговыми обмотками), механически связанный с колесной парой 3, установленной на рельсах 4, а также датчик скорости 5 электродвигателя 1 и систему регулирования, которая состоит из статического преобразователя частоты 6 с автономными инверторами 7 и блока управления 8 преобразователем 6. При этом каждый автономный инвертор 7 подключен к отдельной дуговой обмотке 2, а блок управления 8 имеет обратную связь по датчику скорости 5 и прямую связь со статическим преобразователем частоты 6.
В электроприводе блок управления 8 снабжен устройством измерения ускорения вращения 9 электродвигателя 1, связанным с датчиком скорости 5, и регулятором угла смещения токов 10 дуговых обмоток 2.
Электропривод работает следующим образом.
Регулирование электропривода осуществляется частотным способом. Система регулирования посредством блока управления 8 статическим преобразователем частоты 6 формирует сигналы управления автономными инверторами 7 по алгоритму с однократной на периоде коммутацией силовых элементов и обеспечивает изменение частоты f1 напряжений на выходах автономных инверторов в соответствии с сигналом fp датчика скорости 5 электродвигателя 1 по известному закону f1=f2+fp, где
f2 - частота абсолютного скольжения (частота тока ротора). Кроме того, система регулирования задает сдвиг токов инверторов относительно друг друга на угол Θ=π/3k, определяемый числом k дуговых обмоток 2 статора, где k≥2.
Известно [Курбасов А.С., Седов В.И., Сорин Л.Н. Проектирование тяговых электродвигателей / Под ред. А.С.Курбасова - М.: Транспорт, 1987. - с.364-365], что в области низких частот f1 напряжения питания дуговых обмоток 2 при законах управления статическим преобразователем частоты с однократной на периоде коммутацией силовых элементов (λ=180 эл. градусов или λ=120 эл. градусов) пульсации δМα, крутящего момента, создаваемого в двигателе каждой обмоткой, могут достигать 25% и более от его среднего значения (фиг.2) в зависимости от заданной величины f2 и текущего значения fp. При этом частота следования пульсаций крутящего момента равна шестикратной частоте питающего напряжения, т.е. fδM=6f1.
Для угла Θ=π/3k суммирование крутящих моментов дуговых обмоток позволяет уменьшить до минимально возможного уровня относительную пульсацию δМΣ крутящего момента двигателя с одновременным увеличением частоты следования пульсаций до значений fδM=6kf1, а также достичь необходимой величины среднего момента МсрΣ электродвигателя (на фиг.2 приведен крутящий момент электродвигателя с тремя дуговыми обмотками). При уменьшении угла сдвига токов питания дуговых обмоток в диапазоне π/3k>Θ≥0 пульсация δМΣ крутящего момента двигателя увеличивается и в случае Θ=0 достигает максимального значения, равного пульсации δМα момента от одной дуговой обмотки (фиг.2). В рассматриваемом диапазоне угла Θ частота первой гармоники пульсации момента двигателя составляет fδM=6f1.
Через механическую связь крутящий момент двигателя передается колесной паре 3 (фиг.1), установленной на рельсах 4, создавая касательную силу тяги Fk привода. В качестве примера на фиг.3 приведена упрощенная тяговая характеристика тепловоза [Осипов С.И. и др. Основы локомотивной тяги/ С.И.Осипов., К.А.Миронов, В.И.Ревич. - М.: Транспорт, 1979. - 440 с., С.112-121], которая представляет собой зависимость касательной силы тяги локомотива Fк от скорости движения V и независимо от вида электропередачи содержит участки ограничения по сцеплению 1, ограничения по пусковому току тягового генератора 2 и ограничения по мощности дизеля 3. Участок ограничения по сцеплению 1 рассчитывается для сухих рельсов, а участок ограничения по пусковому току 2 - из условия реализации меньшей силы тяги, чем на участке 1 для уменьшения возможности боксования колесной пары. Трогание с места и разгон локомотива производится по кривой 2, чему соответствует режим пуска и разгона привода при малых частотах f1 напряжения питания дуговых обмоток двигателя. Низкий уровень пульсации δМΣ крутящего момента двигателя при Θ=π/3k благодаря ее гашению в элементах механической связи (на фиг.1 не показаны) практически не вызывает пульсации силы тяги Fk.
Увлажнение рельсов, попадание масла в контакт колеса и рельса и другие факторы вызывают уменьшение коэффициента сцепления ψ на всех скоростях движения локомотива V и, следовательно, снижение участка 1 тяговой характеристики (на фиг.3 - кривая 1'). В результате возникает срыв сцепления, приводящий к режиму боксования колесной пары.
Известно [Минов А.К. Повышение тяговых свойств электровозов и тепловозов с электрической передачей. - М.: Транспорт, 1965. - С.229], что режим боксования начинается при окружном ускорении колесной пары w, превышающем 0,45-0,5 м/с2. Для выделения процесса боксования блок управления 8 (фиг.1) статическим преобразователем частоты 6 снабжен устройством измерения ускорения вращения 9 электродвигателя 1, которое производит дифференцирование сигнала по частоте вращения ротора fр двигателя, поступающего с датчика скорости 5:
εр=Tдdfp/dt,
где Tд - постоянная времени дифференцирования, величина которой определяет необходимую продолжительность процесса измерения углового ускорения ротора εр.
При выделении сигнала εр, которое в пересчете соответствует окружному ускорению колесной пары w, превышающему 0,5 м/с2, устройство 9 подает сигнал на регулятор угла смещения токов 10 дуговых обмоток 2. Регулятор 10 обеспечивает уменьшение угла сдвига токов питания дуговых обмоток 2 в диапазоне π/3k>Θ≥0 до значения, определяющего величину пульсации δМΣ, момента двигателя (фиг.2), при которой процесс боксования прекращается. Момент окончания боксования фиксируется также устройством 9 путем измерения εр, соответствующего w<0,45 м/с2, и от устройства 9 подается сигнал на регулятор 10, который устанавливает угол Θ в указанном выше значении. Этот момент соответствует точке А на фиг.3.
Полученная пульсация момента двигателя вызывает пульсацию 4 силы тяги Fk (фиг.3), которая в одной части периода пульсации находится ниже кривой 1', а в другой части - выше. Это позволяет реализовать предельную силу тяги с полезным проскальзыванием в зоне максимально возможного коэффициента сцепления ψmax при отмеченных ранее неблагоприятных условиях работы привода. На фиг.4 приведена зависимость коэффициента сцепления ψ от скорости скольжения Vск (или коэффициента скольжения s) 1 при фиксированной скорости движения локомотива V [П.Вигнер. Тягово-энергетические показатели электровозов серии 250 // Железные дороги мира. - 1985. - №10, С.9-16]. По аналогичной зависимости изменяется предельно возможная сила тяги, определяемая известным выражением Fк=ψQ, где Q - сцепной вес локомотива, а для рассматриваемого привода - осевая нагрузка. При полученной пульсации сила тяги Fk реализуется по замкнутой кривой 2 (фиг.4), не приводя к разносному боксованию колесной пары.
В случае повторного возникновения процесса боксования колесной пары (фиг.3, точка В), вызванного некоторым уменьшением величины δМΣ в процессе разгона привода и расхождением участков 2 и 1' характеристики, регулятор 10 (фиг.1) производит дальнейшее уменьшение угла Θ, и электропривод работает по описанному выше алгоритму. В точке С (фиг.3) кривая 2 или 3 пересекает участок Г тяговой характеристики, что обуславливает окончательное прекращение режима боксования.
Переход тяговой характеристики с участка 2 на участок 3 обычно происходит при скоростях движения локомотива 5-15 км/ч. На участке 3 сила тяги Fk быстро уменьшается, а скорость движения V возрастает. При достижении скорости V>15 км/ч, гарантирующей выход из зоны боксования, система регулирования переходит в исходное состояние, задавая угол сдвига токов инверторов Θ=π/3k. Это можно осуществить, например, путем переключения регулятора 10 (фиг.1) по сигналу fp датчика скорости 5, соответствующему в пересчете указанной скорости. Кроме того, возвращение системы в исходное состояние аналогично производится по сигналу отключения сети питания привода (сброса нагрузки).
Технико-экономическая эффективность изобретения в сравнении с прототипом заключается в том, что в режиме боксования колесной пары система регулирования электропривода обеспечивает уменьшение угла сдвига токов дуговых обмоток электродвигателя. При этом задается требуемая пульсация касательной силы тяги привода, которая позволяет реализовать предельную силу тяги с полезным проскальзыванием в зоне максимального коэффициента сцепления, благодаря чему электропривод имеет повышенные тяговые качества в условиях ограниченного сцепления колесной пары и рельсов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЧАСТОТНОУПРАВЛЯЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 1996 |
|
RU2100898C1 |
| ЧАСТОТНО-УПРАВЛЯЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2000 |
|
RU2194355C2 |
| СТЕНД ДЛЯ МОДЕЛИРОВАНИЯ ДИНАМИЧЕСКИХ ПРОЦЕССОВ В ТЯГОВОМ ПРИВОДЕ ЛОКОМОТИВА С ЭЛЕКТРОПЕРЕДАЧЕЙ | 2012 |
|
RU2496100C1 |
| ЧАСТОТНО-УПРАВЛЯЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2001 |
|
RU2231209C2 |
| Преобразователь тяговый локомотива | 2019 |
|
RU2732816C1 |
| ЧАСТОТНО-УПРАВЛЯЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2316109C1 |
| Способ обнаружения боксования и юза колес транспортного средства с электрической передачей | 2016 |
|
RU2657157C1 |
| СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМИ ТЯГОВЫМИ ДВИГАТЕЛЯМИ, ПОДКЛЮЧЕННЫМИ ПАРАЛЛЕЛЬНО К ОДНОМУ ИНВЕРТОРУ | 2010 |
|
RU2428326C1 |
| Способ обнаружения боксования и юза колес транспортного средства с электрической передачей | 2018 |
|
RU2702549C1 |
| Устройство для регулирования силы тяги и торможения электроподвижного состава при автоматическом управлении | 2019 |
|
RU2739552C1 |
Изобретение относится к области электротехники и может быть использовано в рельсовом транспортном средстве и непосредственно касается асинхронных тяговых приводов локомотивов. Техническим результатом является повышение тяговых качеств электропривода в условиях ограниченного сцепления колесной пары и рельсов. Частотно-управляемый асинхронный электропривод рельсового транспортного средства содержит электродвигатель, по крайней мере, с двумя дуговыми обмотками статора, механически связанный с колесной парой, установленной на рельсах, датчик скорости электродвигателя и систему регулирования. Система регулирования состоит из статического преобразователя частоты с автономными инверторами для питания обмоток статора и блока управления преобразователем с обратной связью по скорости и прямой связью со статическим преобразователем частоты. Система регулирования формирует сигналы управления инверторами по алгоритму с однократной на периоде коммутацией силовых элементов, обеспечивает изменение частоты напряжений на выходах автономных инверторов и сдвиг токов инверторов относительно друг друга на угол, определяемый числом дуговых обмоток. Электропривод снабжен устройством измерения ускорения вращения электродвигателя, связанным с датчиком скорости электродвигателя и фиксирующим возникновение и окончание процесса боксования колесной пары, регулятором угла смещения токов дуговых обмоток статора. В режиме боксования колесной пары по сигналам, поступающим от устройства измерения ускорения, регулятор обеспечивает уменьшение угла сдвига токов питания дуговых обмоток в диапазоне π/3k>Θ≥0, определяемом числом k дуговых обмоток статора. При этом задается требуемая пульсация касательной силы тяги привода, которая позволяет реализовать предельную силу тяги с полезным проскальзыванием в зоне максимально возможного коэффициента сцепления. 4 ил.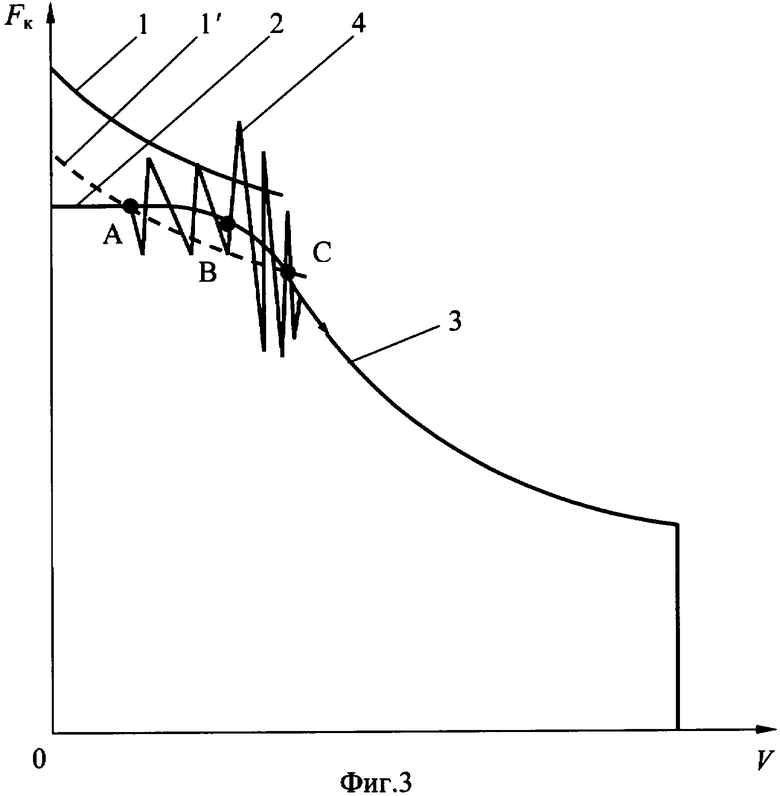
Частотно-управляемый асинхронный электропривод рельсового транспортного средства, содержащий электродвигатель, который снабжен не менее чем двумя дуговыми обмотками статора и механически связан с колесной парой, установленной на рельсах, а также датчик скорости электродвигателя и систему регулирования, состоящую из статического преобразователя частоты с автономными инверторами, каждый из которых подключен к отдельной дуговой обмотке статора, и блока управления преобразователем, имеющего обратную связь по датчику скорости и прямую связь со статическим преобразователем частоты, при этом система регулирования посредством блока управления статическим преобразователем частоты формирует сигналы управления инверторами по алгоритму с однократной на периоде коммутацией силовых элементов, обеспечивает изменение частоты напряжений на выходах автономных инверторов и сдвиг токов инверторов относительно друг друга на угол, определяемый числом дуговых обмоток, отличающийся тем, что блок управления статическим преобразователем частоты снабжен устройством измерения ускорения вращения электродвигателя, связанным с датчиком скорости электродвигателя и фиксирующим возникновение и окончание процесса боксования колесной пары, а также регулятором угла смещения токов дуговых обмоток статора, который по сигналам, поступающим от устройства измерения ускорения вращения электродвигателя, обеспечивает в режиме боксования колесной пары уменьшение угла сдвига токов питания дуговых обмоток в диапазоне π/3k>Θ≥0, определяемом числом k дуговых обмоток статора.
| ЧАСТОТНО-УПРАВЛЯЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2000 |
|
RU2194355C2 |
| ЧАСТОТНОУПРАВЛЯЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 1996 |
|
RU2100898C1 |
| ЧАСТОТНО-УПРАВЛЯЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2003 |
|
RU2253940C2 |
| Регулируемый электропривод для низкоскоростного технологического оборудования | 1985 |
|
SU1385213A1 |
| Способ частотного управления многообмоточным электродвигателем | 1981 |
|
SU1066023A1 |
| US 7224079 B2, 29.05.2007 | |||
| DE 10252507 A1, 27.05.2004 | |||
| Погрузчик-подпрессовщик кормов | 1987 |
|
SU1521356A1 |
| WO 200731058 A1, 22.03.2007. | |||

