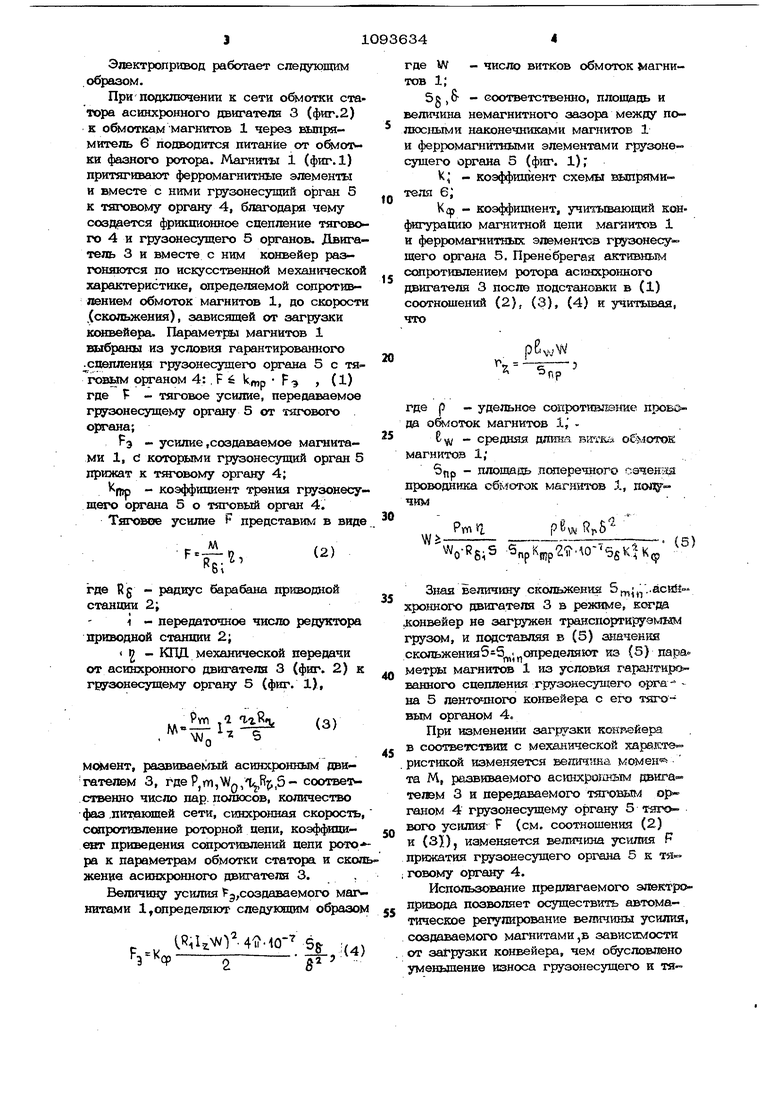
Изобретение относится к конивейерюму транспорту, а более к жкретно к магнитно--фрикииошсым электрсприводам ленточных конвейеров, и может быть использовано в качестве пр В« то«шого нрИБода многодвигатепьного ленточного шжвейера большой протяженности. Известен магнитно-фрикционный жуточный привод ленточногю конвейера, содержащий приводную станцию, грузоне- сущий орган с ферромагнитными элементами и тяговый орган с закреплвннЬпли на нем постоянными магнитами ij . Однако такой ненадежен в рй боте, так как отключение одного такого привода (при аварии) приводит к останов ке всего конвейера. Поэтому в конвейере с такими приводами при его недогруз ке невозможно отключение одного или нескольких приводов с целью электроэнергии. Кроме того, для успеишой эксплуатации этого промежуточного привода многодвигательного ленточного конвейера необходимы специальные средства выравнивания нагрузки двигателей различных промежуточных приводов (например, му ты)., Наиболее &1изким к изобретению по технической сущности является магнитно фршооишный электропривод ленточного конвейера, содержащий магшглы, приводную стенцию с асинхронным двигателем с фазным ротором, механически связанны с приводной станцией тягсшый орган, уса новленный с возможностью фрикционного (благодаря магнитам) сцепления с грузонесуюим органом, с бженным нитшлу и элементами 2j i. Одаако в таком приводе не осущестВЛ6НО регулирсввание создаваемого магнитами усилия прижатия грузонесущего органа конвейера к его тяговому органу в зависимости ОТзагр(узки конвейера, чем обустовлен одшшксйвый износ грузоHecyioero и тягового органов при любой загрузке конвейера. Целью изобретения является повхаие ние надежности путем обеспечения автоматлпеского регулирования величины уси ПИЯ, создаваемого магнитами, в зависимости от загрузки ксщвейера. Цель достигается тем,что в электрсщрвводе, содержащем магнипЕЛ, асинхрошжй двигатель с фазным роторе, механически связанного с тяговьпи оргаwfSM, и грузонесужий орган, магнитнофрЕвлионно связанный с тяговым органом обмотки магнитов подклкпены к выводам фазного ротора асинхронного двигателя через выпрямитель, причем параметры магнитов выбраны из условия pe,NRrS г ГТ1 /I V Ji: , Snp4 0S6fc K гдеР,т,Л/о,К«1,5гп1и соответственно коли- чество пар полюсов,количество фаз питающей сети, синхронная скорость, Коэффициент приведения сопротивления вели ротора к параметрам обмотки статора и скольжение асинхронного двигателя в режиме, когда конвейер не загружен транс прртируемым грузом, Snpipj WjW - площадь п М1еречного сечения, сопротивление привода,средняя длина витка, а также число витков катушки электромагнита;. 5§,S - плсяцадь и величина немагнитного зазора между 1юлюсным1 наконечниками магнитов и ферромагнитными элементами грузонесущего органа; - коэффициент схемы выходного напряжения выпрям1ггеля; Кф - коэффициент, учнтывакшщй конфигурацию магнитной цепи магнитов и ферромагнитных элементчйв грузонесущего органа; Rg - радиус барабана и перёдатот-. ное число редуктора приводной станции; - КЦД механической передйчй ki,)p - коэффициент трения грузонесуще органа о тяговый. На фиг. 1 изображен магнитно-4фикционный эябктр я1ривод ленточного конвейера, общий вид; на фиг. 2 - блсж-схема электропривода. Магнитвсм|)ршашсвшый электропривод ленточного конвейера содержит магниты 1, приводную станцию 2 (фиг. 1) с асинхронным двигателем 3 с фааным ротором (фиг. 2), механически связанный с приводной стшогаей 2 тяговзьЛй орган 4, груэонесущнй орган 5, при этом обмотки магнитов 1 подключены к выводам фазного ротора асинхронного двигателя 3 через выпрямитель 6. В качестве тягового органа может быть использована резинотканевая ленте, а в качестве грузонесущего органа резинотроссовая лвнта или лента с магнитно- лягкой обкладкой. Приводная станция ленточного конвейера содержит приводной асинхронный двигатель, редуктор, и барабан.
Электропривод работает спедуюпщм .образом.
При подключении к сети обмотки статора асинхронного двигателя 3 (фиг. 2) к ой юткам магнитов 1 через вьшрямитега 6 подводится питание от обмот ки фазного ротора. Магниты 1 (фиг.1) притягивают ферромагнитные элементы и вместе с ними грузонесущий орган 5 к тяговому органу 4, благодаря чему создается фрикционное сцепление тягового 4 и грузонесущего 5 органов. Двигатель 3 и вместе с ним конвейер разгоняются по искусственной механической характеристике, определяемой сопротивлением обмоток магнитов 1, до скорости .(скольжения), зависящей от загрузки конвейера. Параметры магнитов 1 выбраны из условия гарантированного здепления грузонесущего органа 5 с тяговым органом 4: , F 6 kmp F э , (1) где Р - тяговое усилие, передаваемое грузонесущему органу 5 от тягового органа;
РЭ усилие .создаваемое магнитами 1, С которыми грузонесущий орган 5 прижат к тяговому органу 4;
- коэффициент трения грузонесущего органа 5 о тяговый орган 4.
Тяговое усилие F представим в виде
М Ч(
(2)
F
где W - число витков обмоток магнитов 1;
5g ,& - соответственно, площадь и величина немагнитного зазора между полюс{шгми наконечниками магнитов 1 и ферромагнитными элементами груэонесущего органа 5 (фиг. 1),
К; - коэффициент схемы шлпрямителя 6i
Кф - коэффициент, учитьшающий конфигурацию магнитной цепи магнитов 1 и ферромагнитных элементов грузонесущего органа 5. Пренебрегая активным сопротивлением ротора асинхронного двигателя 3 после подстановки в (1) соотнсяиений (2), (3), (4) и учитывая, что
где р - удельное сопротивдение провода обмоток магнитов 1, 6 уу - средшш длшьа Bfr-r&i обмоток магнитов 1/
5пр - площадь лоперечного с.эченш проводника обмоток магнитов 1, чим
рЦ Rp5
(5)
W-5sKlK p
21 где Rg - радиус барабана приводной станции 2; 1 - передаточное число редуктора ариводной сташога 2; i 2 - КГЩ механической передачи от асинхронного двигателя 3 (фиг. 2) к грузонесущему органу 5 (фиг. 1), M M«ieHT, развиваемый асинхронным дви- гателем 3, ,Мр,Ц,К,5- соответственно чксло пар. полюсов, количество фаз .питающей сети, синхронная скорость сопротивление роторной цепи, коэффшшент приведения ссяхротивлений цепи ротора к параметрам обмотки статора и скош женив асинхронногч) двигателя 3.. Величину усилия создаваемого магнитами 1,определяют следующим образом (R,lz wf-4: -10 рЗная величину скольжения 5|,:j.. хронного двигателя 3 в режиме, Kcspfta .конвейер не загружен транспортируэ дам грузом, и подставляя в (5) значения скольжения5 5 ;(Шределяют из (S) пара метры магнитов 1 из условия гарантированного сцепления грузонесущего орга на 5 ленточного конвейера с его тяговым органом 4 При изменении загрузки конрййера в соответствии с механической характ© ристикой изменяется веяинида момен та М, развиваемого асинхро шым двига« телэм 3 и передаваемого тяговшх( орГШ10М 4 грузонесущему органу 5 тягового усилия- F (см. соотношения (2) и (31), изменяется величина усилия F прижатия грузонесущего органа 5 к тя говому органу 4. Использование предлагаемого электропривода позволяет осуществить автоматическое регулирование величины усилия, создаваемого магнитами ,в зависимости от загрузки конвейера, чем обусловлено уменьшение износа грузонесущего и тя
гЧжого органсяв, а выбор параметров магййтов из условия гарантированного сцепления грузонесущего органа ленточмого конвейера с его тяговым органом обеспечивает отсутствие прорисовки тягового органа относительно грузонесущего органа и нормальную работу пршвода во всем диапазоне изменения загрузки конвейера.
Кроме того, при применении предла гаемого эдектрсжривоца нет необходимости в использовании спепиальшйЬс, средств выравнивания нагрузок различных асинхронных двигателей 6гк1гор&ря маяой жесткости ИХ механических характеристик вследствие подЕЛюч;ения к выводам фазного ротора асинхронного дэигйтвяа обмоток магнитов.
/V
сСРсОэсаэ
/
Т
Фаг./
Фаг. г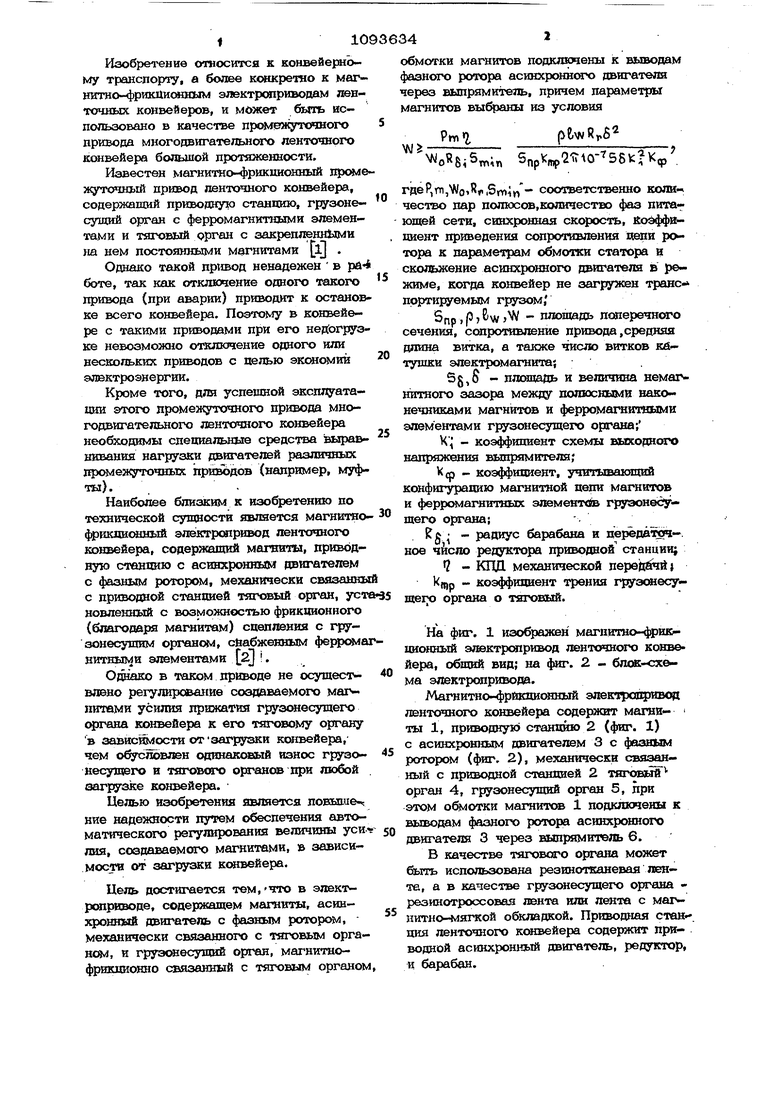

| название | год | авторы | номер документа |
|---|---|---|---|
| Магнитно-фрикционный электропривод ленточного конвейера | 1986 |
|
SU1382775A2 |
| Мотор-барабан ленточного конвейера | 1986 |
|
SU1351847A1 |
| Промежуточный привод ленточного конвейера | 1975 |
|
SU549388A1 |
| Промежуточный привод наклонного ленточного конвейера | 1982 |
|
SU1033389A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СКОРОСТИ ТЯГОВОГО ОРГАНА САМОДЕЙСТВУЮЩЕГО КОНВЕЙЕРА | 1992 |
|
RU2061636C1 |
| Электромагнитно-фрикционный привод конвейера | 1983 |
|
SU1146249A1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА ПЕРЕМЕННОГО ТОКА | 1993 |
|
RU2071628C1 |
| Дугостаторный электропривод винтового пресса | 1981 |
|
SU1027055A1 |
| СИСТЕМА ВОЗДУШНОГО ОХЛАЖДЕНИЯ БЛОКОВ ПУСКОТОРМОЗНЫХ РЕЗИСТОРОВ | 2010 |
|
RU2465152C2 |
| Промежуточный привод ленточного конвейера | 1976 |
|
SU581032A1 |
МАГНИТНОиФРШШИОННЫЙ ЭЛЕКТРОПРИВОД ЛЕНТОЧНОГО КОНВЕЙЕРА, содержаний магнита, асшкронный двигатель с фазным ротором, механически связанный с TsiroBbiM органом, и грузонесущий орган, магнитно :фр11взгашшо связанный с тяговым органом, отличающийся тем, что, с целью повышения надежности путем . - обеспечения автоматического регулиро вания величины усилия, создаваемого С магаитами, в зависимости от загрузки конвейера, обмотки магнитов подключены к вьшодам фазного ротора асннхршного двигателя. через выпрямитель причем параме11яы магнитов выфаны из ус:лов)ш p-gw-RrS P.m-r iW .iO-7.5g. VN гдеР, m,WQ,Rr соответственно числопар полюсов, количество фаз питакяцей сетв, синхронная скорость, коэффициент приведения соаротишюния цепи ротора к парат мет|рам охотки статора и скольмвение асинхронного даигате}К1 в режиме холйю того хода конвейера; Tip)p,6w,W - плшоадь поперечного се Чения, сопротивление привода, средняя шшна витка и число в пгков катушки электромагнита; Sg,8 - площадь и величина немагнитного зазови ; между полюсными нйконечниками магаитов и ферромагнитшшв элементами грузонесущего органа; . ki - коэффшгаент формы выхс|и ного напряжевЕЯ вьшрямитеш Кф - коэффшжанаг, учитываюDO щий к жф1ог7рапию магнитной цепи маг9д 00 4 нитов; R - радцус барабана и пере даточное число редуктора приводной станции; 2 КПД механической передачи; mf - коэффициет трения грузо несутаегх) органа о тяговый орган.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Н.Г | |||
| Основы созошаия магнитных транспортных установок М., 1972,с | |||
| Аппарат для радиометрической съемки | 1922 |
|
SU124A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Штокман Н.Г | |||
| Осношл создания магнитных транспортных установок | |||
| М., Недра, 1972,с | |||
| Паровоз для отопления неспекающейся каменноугольной мелочью | 1916 |
|
SU14A1 |
