звено, динамической коррекции и второе звено умножения, а также первый функциональный преобразователь, подключенный входом к датчику скорости ветраэ а выходом - ко второму звену умножения, причем первое звено умножения подключено входами к задатчику скорости ротора и пусковому переключателю, третий компаратор подключен к датчику скорости ротора, а выход второго звена умножения - к первому селектору,
4« Система по пп, 1-3-,о т л и чающаяся тем, что блок управления мощностью содержит последовательно соединенные второй функциональный преобразователь, четвертый компаратор, апериодическое звено, . сумматор и .третье звено умножения, последовательно соединенные пятый компаратор и второе звено динамической коррекции, а также третий функциональный преобразователь, подключенный входом к датчику скорости ветра,, а выходом - к третьему звену умножения, причем выход второгр звена динамической коррекции подключен к сумматору, входы пятого компаратора подключены к датчикам скорости ротора и скорости электрогенератора, четвертьм. компаратор подключен к датчику крутящего момента вала электрогенератора, второй функциональный
преобразователь подключен к датчику скорости ветра, а выход третьего звена умножений подключен к третьему селектору,
5.Система по пп. 1-4, отличающаяся тем, что интегратор содержит последовательно соединенные ограничитель, шестой компаратор и звено интегрирования, а также ограни 1итель сигнала интегратора, подключенный входом к выходу звена интегрирования, а выходом - к шестому компаратору, причем выход звена интегрирования подключен к приводу поворотных лопастей, а вход ограничителя синала интегратора подключен к третьем селектору.
6.Система по п. 5,отличающ а я с я тем, что интегратор содержит четвертый функциональный преобразователь к звеноделения, подключенное входами к Датчикам скорости ветра и скорости ротора, а выходом - к четвертому функциональному преобразователю, причем выход четвертого функционального преобразователя подключен к ограничителю сигнала йнтегратора. 

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО НА ОСНОВЕ ЛАЗЕРА ДЛЯ ИЗМЕРЕНИЯ РАССТОЯНИЯ ДО СОВМЕСТНОЙ ЦЕЛИ И/ИЛИ УРОВНЯ ЖИДКОСТИ | 1994 |
|
RU2101731C1 |
| Система управления ветродвигателем | 1985 |
|
SU1366687A1 |
| ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ЭЛЕКТРОПРИВОД | 2003 |
|
RU2265950C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ТУРБОВИНТОВОГО ДВИГАТЕЛЯ | 1992 |
|
RU2022144C1 |
| Система управления ветряной турбиной с поворотными лопастями | 1984 |
|
SU1278484A1 |
| Способ управления газотурбинным двигателем с форсажной камерой сгорания | 2021 |
|
RU2774566C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АСИНХРОНИЗИРОВАННЫМ СИНХРОННЫМ ГЕНЕРАТОРОМ | 2000 |
|
RU2189105C2 |
| Устройство для точного останова электропривода | 1985 |
|
SU1272447A1 |
| ТЕПЛОВАЯ ПРОТИВООБЛЕДЕНИТЕЛЬНАЯ СИСТЕМА ВРАЩАЕМОГО ЭЛЕМЕНТА | 1996 |
|
RU2093426C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2022 |
|
RU2774564C1 |
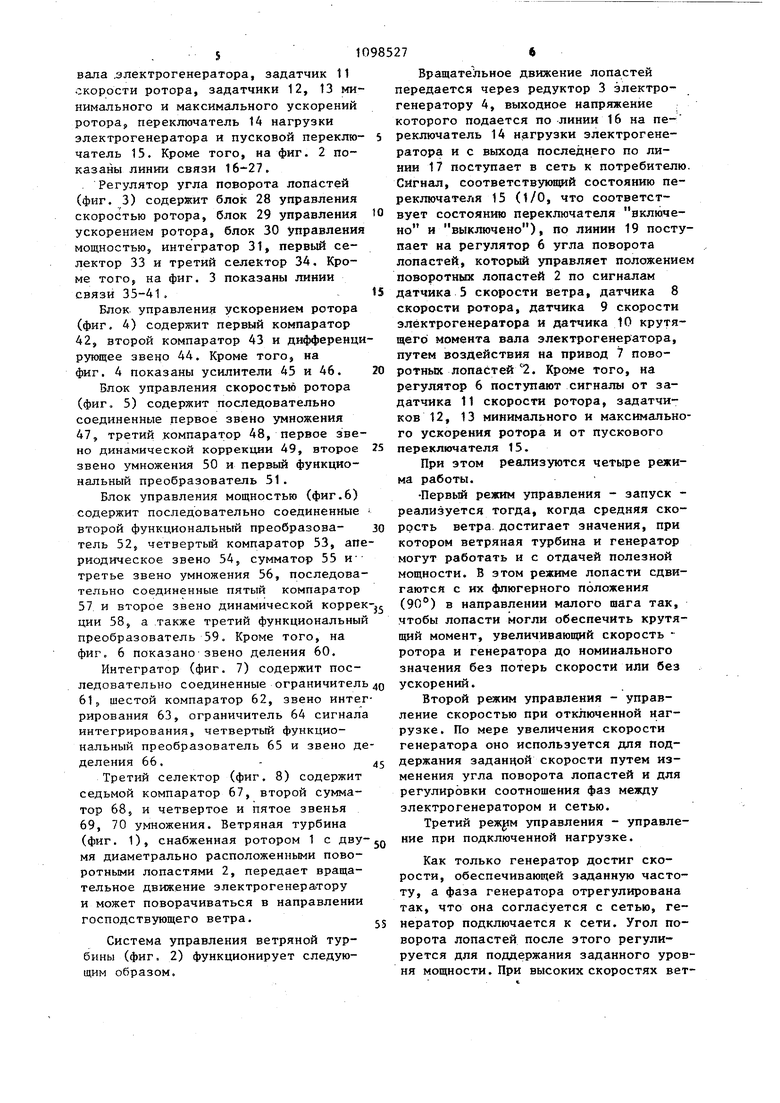
1. СИСТЕМА УПРАВЛЕНИЯ ВЕТРЯНОЙ ТУРБИНОЙ, снабженной ротором с поворотными лопастями и связанной через редуктор с электрогенератором, содержащая последовательно соединенные датчик скорости ветра, регулятор угла поворота лопастей и привод поворотных лопастей, отличающаяс я тем, чта, с целью повышения КПД электрогенератора и повьшения безопасности его работы, она дополнительно содержит датчик скорости ротора, датчик скорости электрогенератора, датчик крутящего момента вала электрогенератора, задатчик скорости ротора, задатчики минимального и максимального ускорений ротора, переключатель нагрузки электрогенератора и пусковой переключатель, а регулятор ..угла поворота лопастей составлен из блока управления скоростью ротора, блока управления ускорением ротора блока управления мощностью, интегратора и первого, второго и третьего селекторов, подключенных входами соответственно к блоку управления скоростью ротора и блоку управления ускорением ротора, к первому селектору и блоку управления ускорением ротора, к второму селектору и блоку управления мощностью, причем интегратор подключен входом к третьему селектору, а выходом - к приводу поворотных лопастей, входы блока управления скоростью ротора подключены к датчику и задатчику скорости ротора, датчику скорости ветра и пусковому переключателю, входы блoka управления ускорением ротора подключены к датчику скорости ротора и задатчикам минимального и максимального ускорений ротора, входы блока управления мощностью подключены к датчикам скорости ветра, скорости ротора, скоросСО ти электрогенератора и крутящего момента вала электрогенератора, интегратор подключен к датчикам скорости ветра и скорости ротора, а третий селектор подключен к переключателю нагрузки электрогенератора. 2.Система по п. 1, отличающаяся тем, что блок управления со -ускорением ротора содержит первый 00 и второй Компараторы, а также дифел ю ференцирующее звено, подключенное входом к датчику скорости ротора, а выходом - к первому и второму компараторам, связанным соответственно с задатчиками максимального и минимального ускорений ротора, причем выходы первого и второго компараторов подключены соответственно к первому и второму селекторам. 3.Система по пп. 1 и 2, отличающаяся „ТИМ, что блок управления скоростью.ротора содержит последовательно соединенные первое звено умножения, третий компаратор, первое
Изобретение относится к энергетике, в частности к автоматическому уп равлению ветряными турбинами. Известна система управления, ветря ной турбиной, снабженной ротором с поворотными лопастями и связанной через редуктор с электрогенератором, содержащая последовательно соединенные датчик скорости Befpa, регулятор угла поворота лопастей и привод поворотных лопастей СЬ. Однако известная система не обеспечивает требуемого КПД ветроэлектро генератора и безопасности его работы Целью изобретения является повышение КПД электрогенератора и повышение безопасности его работы. Поставленная цель достигается тем, что система управления ветряной турбиной, снабженной ротором с поворотными лопастями и связанной через редуктор с электрогенератором, содержащая последовательно соединенные датчик скорости ветра, регулятор угла поворота лопастей и привод поворотных лопастей, дополнительно содержит датчик скорости ротора, датчик скорости электрогенератора, датчик крутящего момента вала электрогенератора, задатчик скорости ротора, задатчик минимального и максимального ускорений ротора, переключатель нагрузки электрогенератора и пусковой переключатель, а регулятор угла поворота лопастей составлен из блока управления скоростью ротора, блока управления ускорением ротора, блока управления мощностью, интегратора и первого, второго и третьего селекторов, подключенных входами соответственно к
блоку управления скоростью ротора и блоку управления ускорением ротора, к первому селектору и блоку управления ускорением ротора,- ко второму селектору и блоку управления мощноетью, причем интегратор подключен входом к третьему селектору, а выходом к приводу поворотных лопастей, входы блока управления скоростью ротора подключены к датчику и задатчику CKoрости ротора, датчику скорости ветра и пусковому переключателю, входы блока управления ускорением ротора подключены к датчику скорости ротора и задатчикам минимального и максимального ускорений ротора, входы блока управления мощностью подключены к .датчикам скорости ветра, скорости ротора, скорости электрогенератора и крутящего момента вала электрогенератора, интегратор подключен к датчикам скорости ветра и скорости ротора, а третий селектор подключен к переключателю нагрузки электрогенератора. Блок управления ускорением ротора содержит первый и второй компараторы а также дифференцирующее звено, подключенное входом к датчику скорости ротора, а выходом - к первому и второму компараторам, связанным соответ ственно с задатчиками максимального и минимального ускорений ротора,причем выходы первого и второго компараторов подключены соответственно к первому и второму селекторам. Блок управления скоростью ротора содержит последовательно соединенные первое звено умножения, третий компаратор, первое звено динамической коррекции и второе звено умножения,а также первый функциональный преобразователь, подключенный входом к датчику скорости ветра, а выходом - ко второму звену умножения, причем первое звено умножения подключено входа ми к задатчику скорости ротора и пус крвому переключателю, третий компара тор подключен к датчику скорости ротора, а выход второго звена умноже- ния - к первому селектору. Блок управления мощностью содержи последовательно соединенные второй функциональный преобразователь, четвертый компаратор, апериодическое зв но, сумматор и третье звено умножения, ;последовательно соединенные пятый компаратор и второе звено динамической коррекции, а также третий функци
нальный преобразователь, подключенный входом к датчику скорости ветра, а выходом - к третьему звену умножения, причем выход второго звена динамической коррекции подключен к сумматору, входы пятого компаратора подключены к датчикам скорости ротора и скорости электрогенератора, четвертый компаратор подключен к датчику крутящего момента вала электрогенератора, второй функциональный преобразователь подключен к датчику скорости ветра, а выход третьего звена умножения подключен к третьему селектору.
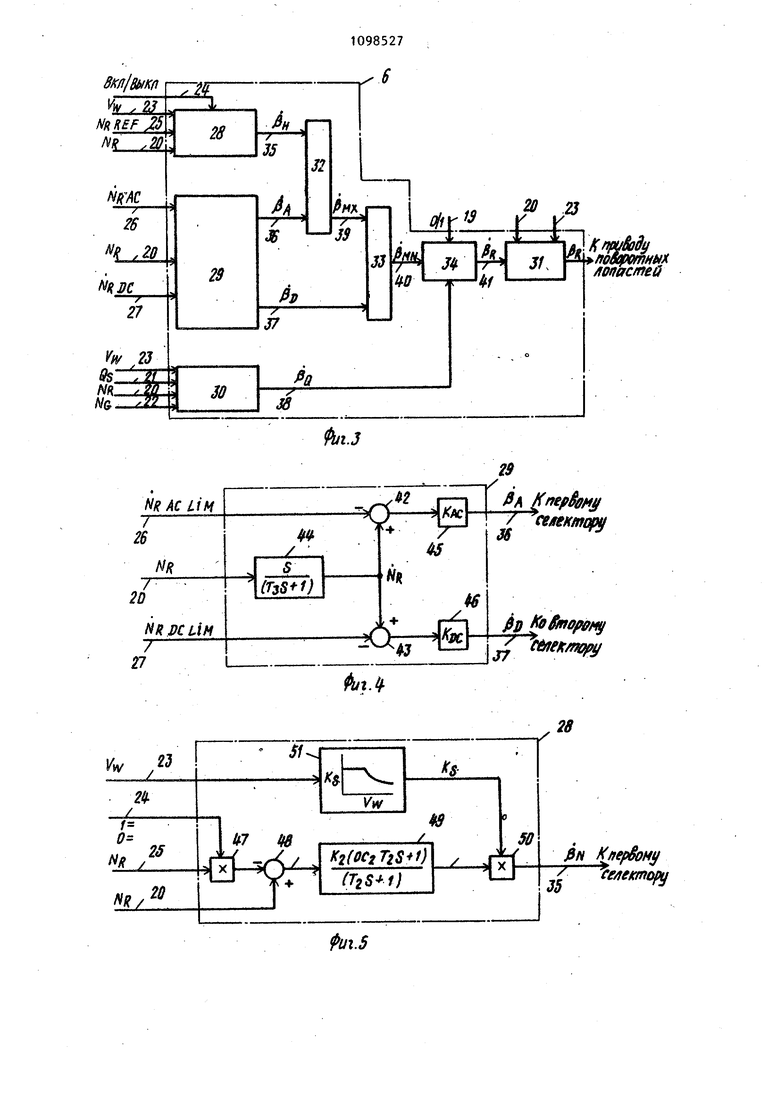
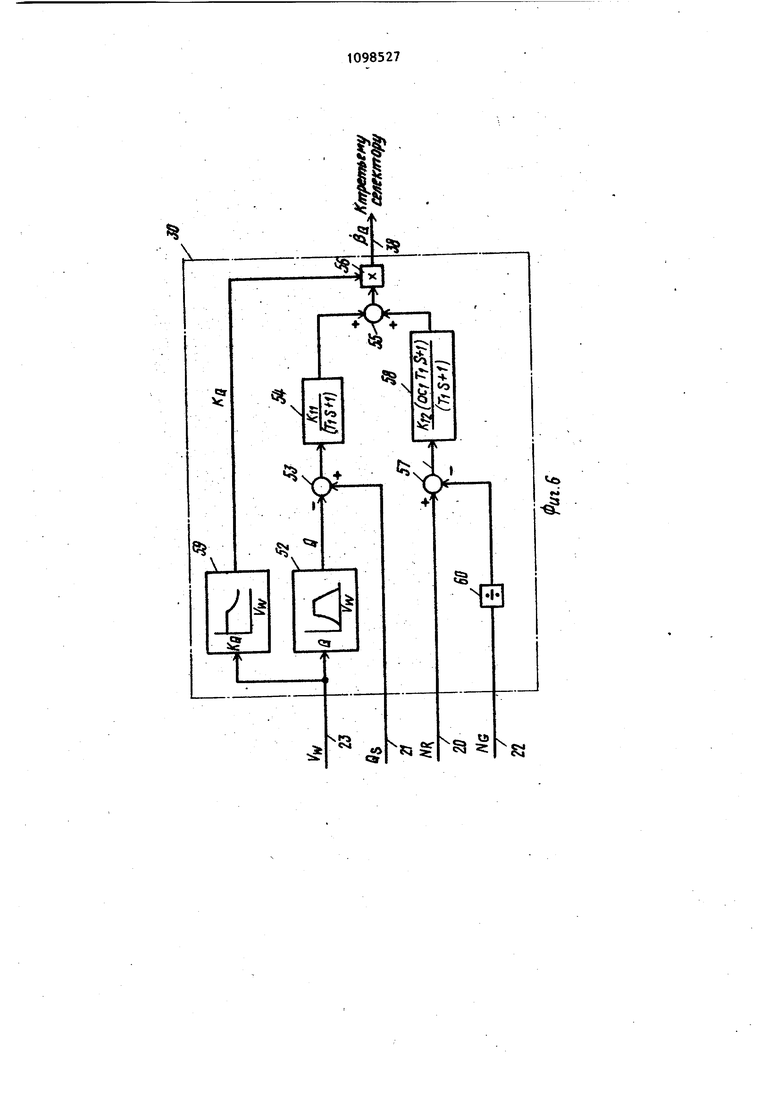
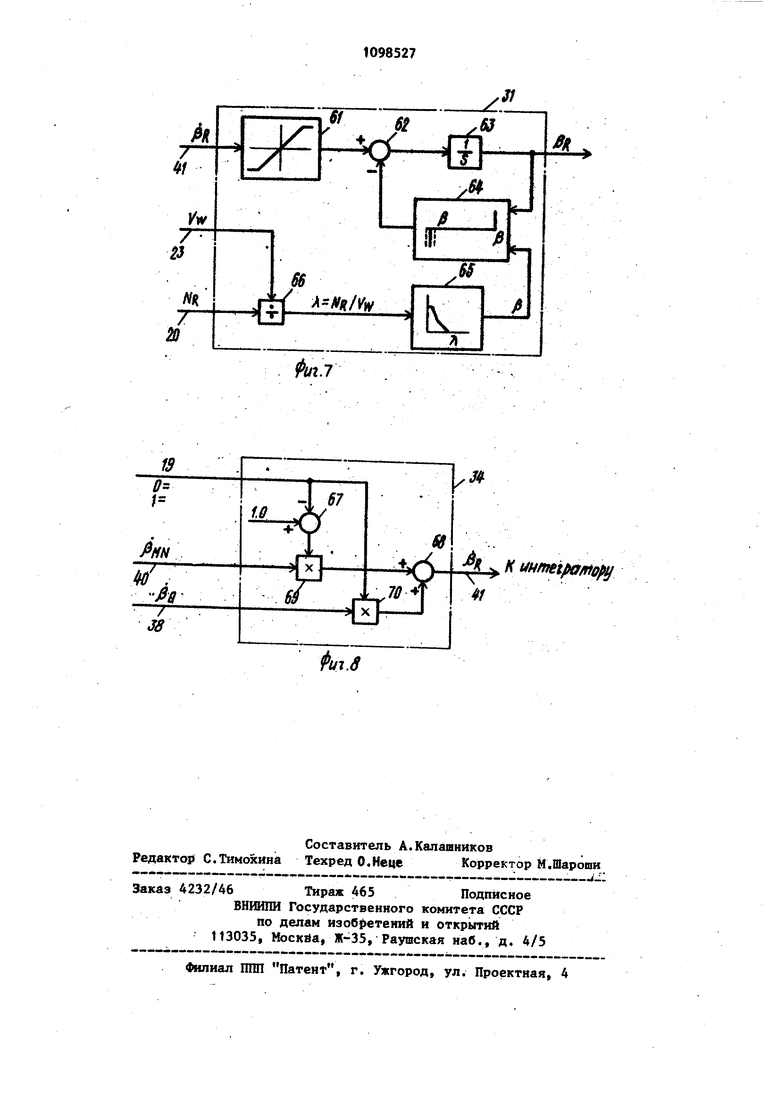
Интегратор содержит последовательна соединенные ограничитель, шестой компаратор и звено интегрирования, а также ограничитель сигнала интегратора, подключенный входом к выходу звена интегрирования, а выходом - к шестому, компаратору, причем выход звена интегрирования подключен к приводу поворотных лопастей, а вход ограничителя сигнала интегратора подключен третьему селектору. Интегратор содержит четвертьм функциональный преобразователь и звено деления, подключенное входами к датчикам скорости ветра и скорости ротора, а выходом - к четвертому функциональному преобразователю, причем выход четвертого функционального преобразователя подключен к ограничителю сигнала интегратора. На фиг. 1 схематически показана ветряная турбина; на фиг. 2 - блоксхема системы управления ветряной турбиной; на фиг. 3 - блок-схема регулятора угла поворота лопастей; на фиг. 4 - блок-схема блока управления ускорением ротора; на фиг. 5 - блоксхема блока управления скоростью ротора-, на фиг. 6 - блок-схема блока управления мощностью; на фиг. 7 - .: блок-схема интегратора; на фиг. 8 блок-схема третьего селектора. Ветряная турбина (фиг. 1) снабжена ротором 1 с поворотными лопастями 2. Система для управления ветряной турбиной, снабженной ротором с поворотньми лопастями и связанной через редуктор 3 с электрогенератором 4, содержит последовательно соединенные датчик 5 скорости ветра, регулятор 6 угла поворота лопастей, привод 7 поворотных лопастей, датчик 8 скорости ротора, датчик 9 скорости электрогенератора, датчик 10 крутящего момента 51 вала .электрогенератора, задатчик 11 скорости ротора, задатчики 12, 13 минимального и максимального ускорений ротора, переключатель 14 нагрузки электрогенератора и пусковой переключатель 15. Кроме того, на фиг. 2 показаны линии связи 16-27. . Регулятор угла поворота лопйстей (фиг. 3) содержит блок 28 управления скоростью ротора, блок 29 управления ускорением ротора, блок 30 управления мощностью, интегратор 31, первый селектор 33 и третий селектор 34. Кроме того, на фиг. 3 показаны линии связи 35-41,Блок управления ускорением ротора (фиг. 4) содержит первый компаратор 42, второй компаратор 43 и дифференци руняцее звено 44. Кроме того, на фиг. 4 показаны усилители 45 и 46. Блок управления скоростью ротора (фиг, 5) содержит последовательно соединенные первое звено умножения 47, третий компаратор 48, первое звено динамической коррекции 49, второе звено умножения 50 и первый функциональный преобразователь 51. Блок управления мощностью (фиг.6) содержит последовательно соединенные второй функциональный преобразователь 52, четвертый компаратор 53, апе риодическое звено 54, сумматор 55 и третье звено умножения 56, последовательно соединенные пятый компаратор 57 и второе звено динамической коррек ции 58, а также третий функциональный преобразователь 59, Кроме того, на фиг. 6 показано звено деления 60. Интегратор (фиг. 7) содержит последовательно соединенные ограничитель 61J шестой компаратор 62, звено инте рирования 63, ограничитель 64 сигнала интегрирования, четвертый функциональный преобразователь 65 и звено де деления 66.Третий селектор (фиг. 8) содержит седьмой компаратор 67, второй сумматор 68, и четвертое и пятое звенья 69, 70 умножения. Ветряная турбина (фиг. 1), снабженная ротором 1 с дву мя диаметрально расположенными поворотными лопастями 2, передает вращательное движение электрогенератору и может поворачиваться в направлении господствующего ветра. Система управления ветряной турбины (фиг. 2) функционирует следующим образом. 27 Вращательное движение лопастей передается через редуктор 3 электрогенератору 4, выходное напряжение которого подается по линии 16 на переключатель 14 нагрузки электрогенератора и с выхода последнего по линии 17 поступает в сеть к потребителю. Сигнал, соответствующий состоянию переключателя 15 (1/0, что соответствует состоянию переключателя включено и выключено), по линии 19 поступает на регулятор 6 угла поворота лопастей, который управляет положением поворотных лопастей 2 по сигналам датчика 5 скорости ветра, датчика 8 скорости ротора, датчика 9 скорости электрогенератора и датчика 10 крутящего момента вала электрогенератора, путем воздействия на привод 7 поворотньк лопастей 2. того, на регулятор 6 поступают сигналы от задатчика 11 скорости ротора, задатчиков 12, 13 минимального и максимального ускорения ротора и от пускового переключателя 15. При этом реализуются четыре режима работы. Первый режим управления - запуск реализуется тогда, когда средняя скорость ветра достигает значения, при котором ветряная турбина и генератор могут работать и с отдачей полезной мощности. В этом режиме лопасти сдвигаются с их флюгерного положения (90°) в направлении малого шага так. чтобы лопасти могли обеспечить крутящий момент, увеличивающий скорость ротора и генератора до номинального значения без потерь скорости или без ускорений. Второй режим управления - управление скоростью при отключенной нагрузке. По мере увеличения скорости генератора оно используется для поддержания заданной скорости путем изменения угла поворота лопастей и для регулировки соотнощения фаз между электрогенератором и сетью. Третий режрм управления - управление при подключенной нагрузке. Как только генератор достиг скорости, обеспечивающей заданную частоту, а фаза генератора отрегулирована так, что она согласуется с сетью, генератор подключается к сети. Угол поворота лопастей после этого регулируется для поддержания заданного уровня мощности. При высоких скоростях ветpa ротор может развивать мощность, превышающую требуемую, поэтому управление мощностью осуществляется путем измерения крутящего момента вала (может быть измерен ток или мощность ; эле1строгенератора) . Четвертый режим управления - останов который реализуется увеличением угла поворота лопасти до флюгерного положения (90°). Регулятор угла поворота лопастей (фиг. 3) работает следующим образом. При подаче команды запуска на линии 24 подается сигнал, соответствующий логической единице, который раз решает прохождение сигнала, поступающего по линии 25 от задатчика 11 ско рости ротора. На выходе блока 28 управления скоростью ротора (линия 35) формируется сигнал p.j , который пос тупает на первый селектор 32. Одновременно блок 29 управления ускорени ем ротора формирует на выходе (лини 36) сигнал /Ъд , также поступающий на первый селектор. Первый селектор 32 является схемой выбора максимального значения сигнала и так как сигнал Рд-алгебраически больше сигнала /i|g , то на выходе первого селектора (линия 39) сигнал рд( соответствует сиг налу р.. Кроме того, на выходе блока 29 формируется сигнал р который по линии 37 поступает на вход вт рого селектора 33, который является схемой выбора минимального значения сигнала, и формирует -на выходе (линия 40) сигнал , также соответствующий сигналу д . Так как нагруз ка отключена, третий селектор 34 обеспечивает прохождение сигнала /j к интегратору 31. По мере увеличения скорости рото ра вырастает значение сигнала Np , поступающего по линии 20, и в зависи мости от сигнала , поступающего по линии 23, увеличивается значение сигнала /jj в линии 35 до тех пор, пока оно не превысит величину сигнала д в линии 36, поступающего от блока 29 и формируемого в зависимоети от сигнала N (линия 20) и сигналов задатчиков минимального и максимального ускорений ротора, тогда первый селектор 32 пропускает сигнал Ь.. на вход второго селектора 33, а так как сигнал fb|M (как и сигнал Дд все еще меньше сигнала (ijj , поступаю щего на второй селектор 33 по линии 37, то сигнал на выходе второго и третьего селекторов соответствует р,.., и тем самым осуществляется регулирование не по ускорению, а по скорости, что соответствует установившемуся режиму работы при постоянной скорости ветра. При поступлении команды остановки ветряной турбины сигнал -/bff y на выходе первого селектора 32 соответствует сигналу jft , однако второй селектор 33 обеспечивает прохождение сигнала ,i- от блока 29 управления ускорением, что обеспечивает уменьшение скорости. При работе с подключенной нагрузкой третий селектор 34 пройускает сигнал /Ьд поступающий по линии 38 от блока 30 управления мощностью, на вход которого поступают сигналы от датчиков скорости ветра, скорости ротора, скорости электрогенератора и крутящего момента по линиям 23, 20, 22, 21. Блок управления ускорением ротора (фиг. 4) работает следующим образом. Сигнал от датчика скорости ротора, поступающий по линии 20 на дифференцирующее звено 44, подается на первый и второй компараторы 42, 43, где сравнивается с сигналами, поступающими на эти компараторы по линиям 27, 26 от задатчиков минимального и максимального ускорений ротора. Разностные сигналы, сформированные первым и вторым Компараторами 42, 43, усиливаются усилителями 45, 46 и поступают по линиям 36, 37 соответственно к первому и второму селекторам. Блок управления скоростью ротора (фиг. 5) работает следующим образом. Сигнал пуска В виде логической единицы поступает по линии 24 на первое звено умножения 47 иообеспечивает прохождение сигнала от зада:тчика. скорости ротора, поступакнцего по линии 25, к третьему компаратору 48, на другой вход которого по линии 20 подается сигнал от датчика скорости ротора. С выхода третьего компаратора 48 разностный сигнал через первое звено динамической коррекции поступает на второе звено умножения 50, на другой вход которого поступает сигнал с выхода первого функционального преобразователя 5,1 реализующего требуемую зависимость сигнала регулирования от сигнала датчика скорости ветра, поступающего на вход первого функционального преобразователя по линии 23. С выхода.второго звена умножения 50 сигнал и., регулирования скорости поступает по линии 35 на первый селектор. Блок управления мощностью (фиг.6) работает следующим образом. Сигнал, поступающий по линии 21 от датчика крутящего момента вала электрогенератора на четвертый компа ратор 53, сравнивается.с заданным сигналом, поступакмцим с выхода второ го функционального преобразователя 52, реализующего требуемую зависимост задающего сигнала от сигнала датчика скорости ветра, поступающего на вход второго функционального преобразователя 52 по линии 23. Разностный сигнал с выхода четвертого компаратора 53 через апериодическое звено 54 подается на сумматор 55. Одновременно на второй вход сумматора через второе звено динамической коррекции 58 подается сигнал, пропорциональный (с допустимой степенью приближения) производной крутящего момента, формируемый пятым компаратором 57, на входы которого подается по линии 20 сигнал от датчика скорости ротора, а по линии 22 через звено деления 60 на постоянньй коэффициент - сигнал от датчика скорости электрогенератора На входсумматора 55 от второго звена динамической коррекции 58 поступает сигнал, зависящий от первой и . второй прб зводных крутящего момента S на другой вход - задержанный сигнал, зависящий от крутящего момента, что позволяет получить на выходе сумматора 55 сигнал, зависящий от крутящего момента и первых двух его произвддных, что обеспечивает (после интегрирования) реализацию пропорцио нального, интегрального и производного управлений по сигналу крутящего момента вала. Лля компенсации нелинейности аэродинамической характерис тики ротора сигнал с выхода сумматора 55 подается на третье звено умножения 56, где корректируется с учетом сигнала, поступающего от датчика скорости ветра через третий функциональный преобразователь 59 на другой вход третьего звена умножения 56. Полученный сигнал управления мощ костью с выхода третьего звена умножения 56 по линии 38 поступает на третий селектор. Интегратор (фиг, 7) работает следу1(нцим образом. Сигнал управления поступает от третьего селектора по линии 41 через ограничитель 61 на шестой компаратор 62, где сравнивается с сигналом ограничителя 64 сигнала интегрирования, имеющим нулевое значение, если сигнал на выходе звена интегрирования 63 находится в допустимых пределах, и максимальное значение - в противном случае. Разностный сигнал с выхода шестого компаратора поступает на звено интегрирования 63, где ин|тегрируется и подается на привод поворотных лопастей в качестве сигнала управления. Верхний предел значения сигнала управления соответствует флюгерному положению лопастей (90 ), а нижнее значение корректируется в зависимости от отношения скорости ротора к скорости ветра, которое формируется з.веном деления 66, на вход которого поступают по линиям 23, 20 сигналы ат датчиков скорости ветра и датчика скорости ротора. Требуемая зависимость нижнего предела сигнала управления от отношения скорости ротора к скорости ветра формируется четвертым функциональным преобразователем 65. , Третий селектор (фиг. 8) работает следующим образом. На вход третьего селектора по линиям 40, 38 поступают сигналы от второго селектора и от блока управления мощностью, которые подаются на четвертое и пятое звенья умножения 69, 70.На другие входы этих звеньев подается сигнал от переключателя нагрузки электрогенератора, поступающий на вход третьего селектора по линии 19. При подключенной нагрузке значение этого сигнала соответствует единице и выходной сигнал пятого звена умножения 70 соответствует сигналу, поступающему от. блока управления мощностью. На вход четвертого звена умножения 69 сигнал от переключателя нагрузки электрогенератора подается через седьмой Компаратор 67, где сравнивается с единицей, и поэтому инвертируется. Таким образом, при подключенной нагрузке выходной сигнал четвертого звена умножения 69 равен нулю, а сигнал на выходе второго сумматора 68 соответствует сигналу, поступающему от блока управления мощностью. При отключенной нагрузке выходной сигнал пятого звена умножения 70 равен нулю, а выходной сигнал четверто го звена умножения 69 и сигнал на вы ходе сумматора 68 соответствует сигналу, поступающему от второго селектора. Таким образом, третий селектор коммутируе т управление в зависимости от Того, включена или выключена нагрузка. Введение в систему управления вет ряной турбиной датчика скорости рото ра, датчика скорости электрогенерато ра, датчика крутящего момента вала 1 2712 электрогенератора, задатчика скорости ротора, задатчиков минимального и максимального ускорений ротора, переключателя нагрузки электрогенератора и пускового переключателя, вьтолнение регулятора угла поворота лопастей в виде блока управления скоростью ротора, блока управления мощностью, интегратора и первого, второго и третьего селекторов позволяет повысить КПД электрогенератораза счет оптимизации управления и повысить безопасность его работы за счет ограничений сигналов управления и оптимизации процессов пуска и останова.
/V/ AC itM
Т 26
4,44 /
MR
(TjSi-l)
20
NKffCLlH
т
27
Д
n
/ JV
brX
4tf
fifffKmf
f /SdL jvftMM /
Фиг.if.6f
;FH
«/
-4 #/f/tV
MK
Т
20
/Г iJHfnei flto
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Реактор с кипящим слоем | 1980 |
|
SU924489A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| . | |||
