ю
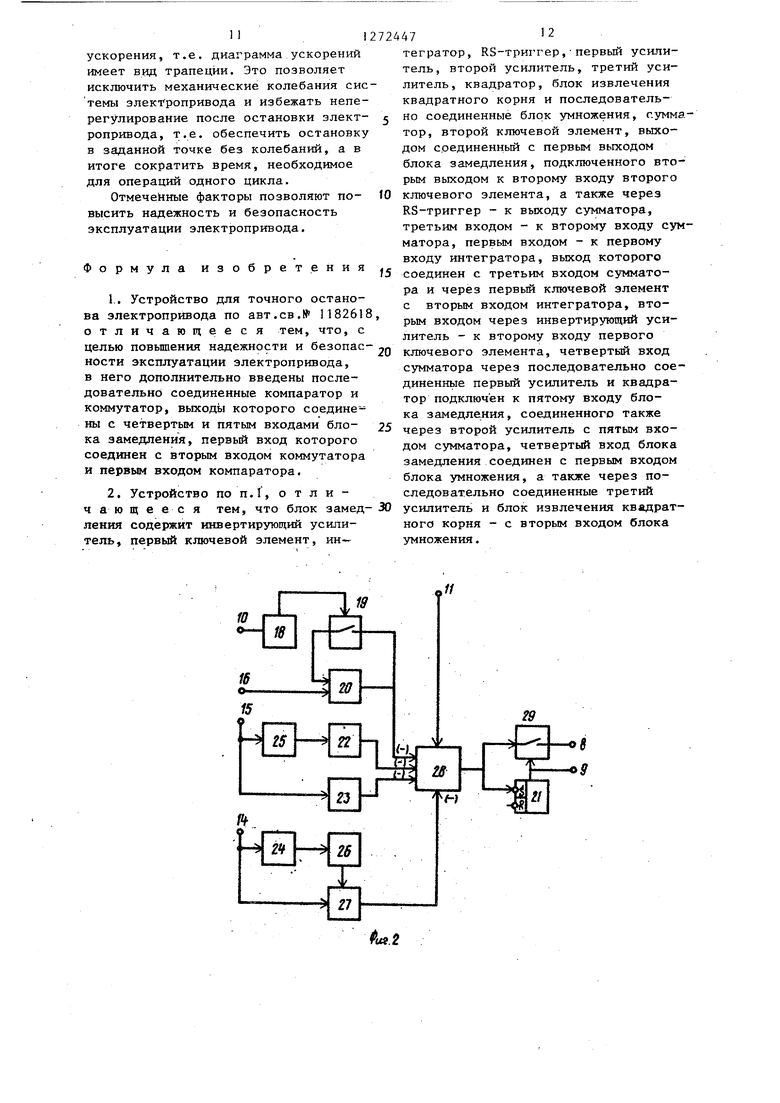
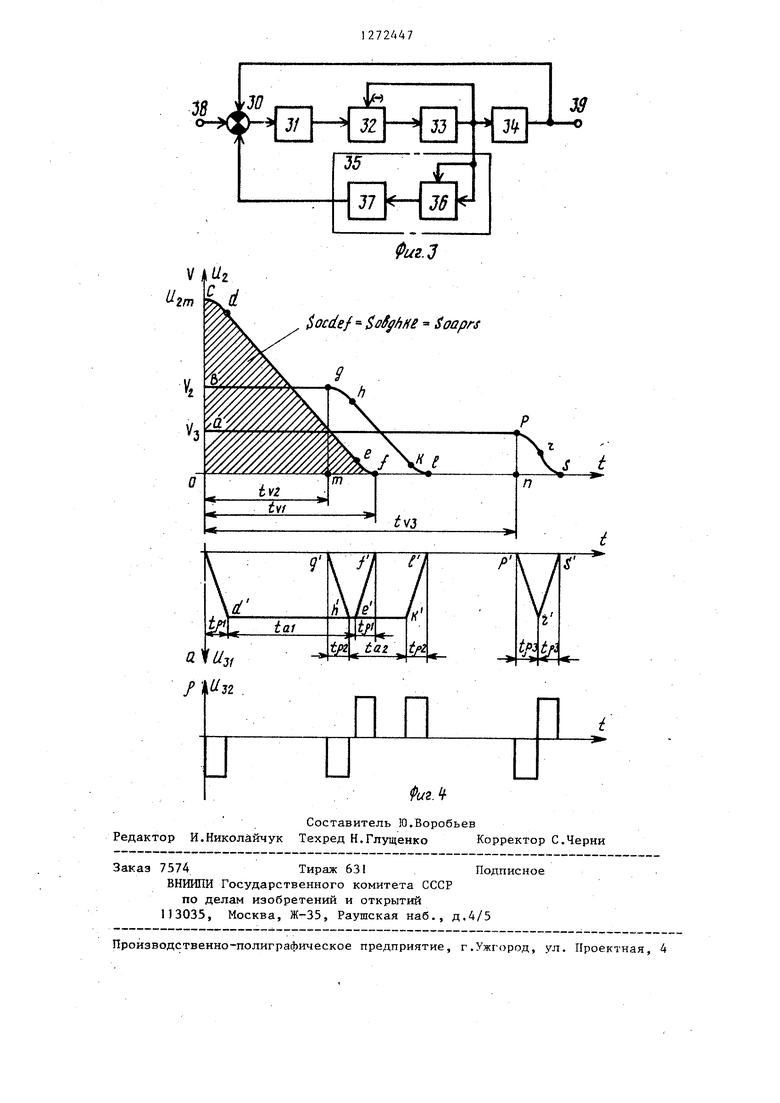
о 1 Изобретение относится к электротехнике, а именно к автоматическому управлению электроприводами, может найти применение при управлении промьтшенности установками, требующими точного останова, и является усовершенствованием устройства по авт. св. № 1182618. Целью изобретения является повышение надежности и безопасности эксплуатации электропривода. На фиг.1 представлена структурная схема устройства для точного останова электропривода; на фиг.2 структурная схема блока замедления; на фиг.З - структурная схема эадатчика интенсивности; на фиг.4 - диаграммы скорости, ускорения и рьшка. Устройство для точного останова электропривода (фиг. Г) содержит по следовательно /соединенные командньй блок 1, задатчик 2 интенсивности, сумматор 3, блок 4 регулирования ск рости электропривода, датчик 5 скорости, ключ 6, блок 7 замедления, первый выход 8 которого соединен с сумматором 3, а второй выход 9 - с входом командного блока 1, второй выход которого соединен с вторым входом ключа 6 и вторым входом 10 блока 7 замедлений, третий вход 11 которого связан с источнико 1 постоян ного входного сигнала, компаратор 12, подключенный к коммутатору 13, первый 14 и второй 15 выходы которо го соединены соответственно с четвертым и пятым входами блока 7 замед ления, первый вход 16 которого соединен с входами коммутатора 13 и ко паратора 12, второй вход 17 которого соединен с источником постоянног входного сигнала. Блок 7 замедления (фиг.2} содержит инвертирующий усилитель 18, пер вый ключевой элемент 19, интегратор 20, RS-триггер 21, первый 22, второй 23 и третий 24 усилители, квадратор .25, блок 26 извлечения квадратного корня, последовательно соединенные блок 27 умножения, сумматор 28, вто рой ключевой элемент 29, выходом сое диненный с первым выходом 8 блока 7 замедления, подключенного вторым вы ходом 9 квторому входу второго клю чевого элемента 29, а также через RS-триггер 21 - к вькоду сумматора 28, третьимвходом П - лс второму В.ХОДУ сумматора 28, первым входом , 72 16 - к первому входу интегратора 20, выход которого соединен с третьим входом сумматора 28 и через первьш ключевой элемент 19 - с вторым входом интегратора 20,вторым входом 10 через инвертирующий усилитель 18 к второму входу первого ключевого элемента 19, четвертьм Ьход сумматора 28 через последовательно соединенные первый усилитель 22 и квадратор 25 подключен к пятому входу 15 блока 7 замедления, соединенного также через второй усилитель 23 с пятым входом сумматора 28, четвертый вход 14 блока 7 замедления соединен с блоком 27 умножения, а также через последовательно соединенные третий усилитель 24 и блок 26 извлечения квадратного корня - с вторым входом блока 27 умножения. Командный блок 1 предназначен для пуска, зап1иты, блокировки и отключения привода и связан с датчиком импульса замедления (не показан). Задатчик 2 интенсивности предназначен для формирования диаграммы скороЬти электропривода во времени и содержит (фиг.З) сумматор 30, нелинейные звенья 31 и 32, интеграторы 33 и 34, узел 35 обратной связи, который состоит из блока 36 умножения и усилителя 37. Вход (клемма) 38 задатчика 2 интенсивности соединен с командным блоком 1, а выход (клемма) 39 - с сумматором 3. Задатчик 2 интенсивности работает следующим образом. При ступенчатом входном воздействии и, , равном по величине максимальнрму значению выходного сигнала командного блока 1, на вход нелинейного звена 31 типа ограничение подается разность AU Ug- К U . Так как в начальньй момент времени Ujg 0,то на выходе звена 31 имеется постоянный сигнал Ug, и, следовательно, увеличиваются сигналы по линейному закону, а U, по параболе до тех пор, пока сигнал станет равным U, .После этого U,j остается постоянным, а U, У ичивается по линейному закону. В момент времени, когда разность ди,, изменит знак, меняются знаки сигналов на вы- ходах звеньев 31 и 32.В результате сигнал Usi начинает уменьшаться по линейному закону, а и, приближается по параболе к заданному максимальному значению сигнала uj.
Для того, чтобы выходной сигнал и, стал .равным нулю в тот момент, когда и,4 станет равным U,, значение коэффициента К выбирается из условия и, - КЗР и,, 0.
Блок 4 регулирования скорости электропривода предназначен для преобразования входного сигнала в величину, необходимую для управления непосредственно электродвигателем.
Сумматоры 3 и 28 предназначены для суммирования входных сигналов и могут быть вьтолнены на операционны усилителях.
Датчик 5 скорости предназначен для преобразования угловой скорости электропривода в пропорциональное ей напряжение и представляет собой, например, тахогенератор.
Ключ 6 и ключевые элементы I9 и 29 предназначены для замыкания входной цепи с выходной по управляющему сигналу и могут быть выполнены на электронном ключе или электромеханическом реле.
Компаратор 12 предназначен для сравнения входных сигналов и может быть выполнен на операционном усилителе ,
Коммутатор 13 предназначен для подачи входного сигнала на один из выходов и может быть выполнен на электронных ключах или электромеханическом реле.
Устройство работает следующим образом.
Для обеспечения оптимальности по быстродействию и исключения динамических перегрузок электропривода ве- личина пути замедления Н должна определяться значениями максимальной с скорости У,максимального ограничиваемого ускорения а и максимального ограничиваемого рьшка р (первой производной по йремени от ускорения) . При этом для формирования управлякщего воздействия V Ug необходим задатчик интенсивности второго порядка (фиг.З), который формирует диаграммы напряжений (фиг.4), пропорциональных скорости V U , ускорению as и,,, рывку В период .замедления ( разгона ) задающие воздействия V, а, р последовательно принимают максимальные значения, причем в любой момент времени хотя бы одно из,воздействий достигает максимального значения. Оптимальное управляющее воздействие достигается, если напряжение U,, равняется нулю в тот момент времени, когда напряжение станет равно входному сигналу и и, задатчика 2 интенсивности. Это Достигается за счет обратной связи - узел 35 по ускорению а, подаваемой через сумматор 30 на вход нелинейного звена 31 - ограничителя ускорения. Параметры цепи обратной связи выбраны из условия
uu,o и,- и,- к,5и„.
Согласно диаграмме скорости (фиг.4) в координатах V ( скорость электропривода) и t (время) величина пути замедления Н равна площади, ограниченной кривой ocdef. Время замедлений
2tp + t
Я
где tp - время замедления с постоянным значением рьшка; t - время замедления с постоянным значением ускорения.
t ЛИ- Ъ- Р РП,
К„из,
де и, и - значения напряжений на выходе звеньев 31 и 32, пропорциональные соответственно ограничиваемому ускорению otpi и рьшку р .
Vm- 2л vf Ui- 2 А ut
в - - ..- щ. --«.«.-.«. - л.
m к;.и„
р а;.
де AV, - изменение скорости РТ
на участке движения с постоянным
рывком и пропорционально-г
,uf, iyia
34 9 V TI
/
де коэффициенты передачи интеграторов 33 и 34.
t YiP-ialb . -i (и - 5л1Ч) аРта„ - к«и„
, следовательно,
t, , Yffi- + JL-i У1п, и,.
«т рт К,и„ К„ и,г
1
т
где значение напряжения на выходе блока 2 при максимальной
скорости V.
Величина Напряжения и„,пропорционального пути замедления, определяет 512
максимальными значениями скоросV, ускорения : г„ , рьшка pj . t-v,
J V, ,dt |- t, .„,
Н о
-i V с--- + ) 2 otm Rm
апряжение, пропорциональное пу-н,
i тт + У
н и. - и. ( -ь ) .
2 - к;;и„ кТзи,/
Напряжение U,, на третьем входе блока 7 замедления пропорционально величине пути замедления Н: U(, Н Так как путь замедления для выбранных параметров постоянный, то с учетом его значения устанавлива.ется датчик импульса замедления на пути движения рабочего органа.
При скорости электропривода V (фиг.4) путь замедления равен площади, ограниченной кривой obghkl:
Н S , + S U1 1 h,.+ h, , obgm raghkl 2
где h| - путь замедления с ускорением, равным нулю; h - путь замедления с ускорением, меньше нуля;
Н, Jv,,dt; Vz 4;
2Д47 6
Во втором режиме скорость не, достигает максимального значения V, а ускорение достигает максимального ограничиваемого значения а, ,5 т.е. диаграмма ускорений имеет вид трапеции.
В третьем ускорение не достигает значения а и изменяется по треугольной диаграмме с двумя участО ками ограничения .
Определим граничное значение сигнала Uj. на втсоде задатчика 2 интенсивности, при котором напряжение U изменяется по треугольной диаграм 5 ме prs. Время.замедления на участке рг ограничением рьшка р
а из, f РгпГр/Гиз
0и,гр К,(|- и 2tp,)
blUL 1 Kji (Uj,)
К «Up.
К JJ и,2
Это напряжение U „ устанавливается на втором входе компаратора 12
(и и,7 ) и для выбранного пути замедления является величиной постоянной.
Время замедления tp на участке рг (фиг.4) до точки г изменения знака ускорения и рывка определяется из выражения
V, - 4. am- л 2 a Pn, -
i и (-- + ); 2 % ,, Kj.U,
и - (yv.ai ,yv,.
Uv
s 2 К„и„ 2К„и,,
н - h,- Ъ О, а в напряжениях и - U), О. Напряжение U|, формируется на выходе интегратора 20. Напряжение Uj, подается на четверты и пятый входы сумматора 28.
При этом условии вьщается сигнал на непосредственное замедление во втором режиме блоком 7 замедления. При скорости электропривода V2 это точка g (фиг.4).
В зависимости от значения сигнала скорости электропривода может быть три режима задания скорости, Лервый режим характеризуется максимальным значением скорости V и„ ,
№ ini
И изменением скорости при замедлении по кривой cdef (фиг.4).
При скорости электропривода ниже максимальной может быть второй или третий режим.
tpj
-r ,,J d t ,,мСили
V,
тогда
Uvi
к.зК„ир„
Путь замедления Н в третьем режиме равен
Н hjH- h.
где hj - путь замедления при скорости, равной или ниже граничной V
rp.V
с
t
Рз
Vs
И 2 ,fили
Р/Ч .к;:Ь
и - и .,- Мк,,к,лз:
Напряжение Uj, формируется на выходе блока 27 умножения. н- h,-UH, При выполнении этого условия в третьем режиме выдается сигнал на не посредственное замедление (точка р, фиг.4) блоком 7 замедления. Рассмотрим работу устройства в первом режиме при V V, т.е. такой скорости, для которой рассчитан путь Н. При подаче сигнала Пуск от командного блока 1 на выходе задатчика 2 интенсивности формируется напряжение задания скорости, которое через сумматор 3 с характеристикой Uj 112+ s блок 4 регули рования скорости электропривода, раз гоняя его до скорости, определяемой амплитудой сигнала на выходе командного блока 1. При подходе рабочего органа электропривода к датчику импульса замедления последний срабатывает и командный блок I в точке (фиг.4) с второго выхода выдает сигО при t «с О t го где Е, -напряжение, принятое за зн значение максимального сиг нала задания скорости и оп ределяемое источником пита ния. г Сигнал и подается на ключ 6, кото рый замыкается и подключает сигнал датчика 5 скорости, на вход компарато ра 12, на второй вход коммутатора 13 ,, ., на вход 16 блока 7 замедления, а также подается на вход 10 блока 7 замедления и далее через инвертирующий усилитель 18 на ключевой элемент 19, который размыкается и подготавливает интегратор 20 к работе. Компаратор 12 сра:батьшает с характеристикойГо при и, и ЕцПри Ug и, - напряжение, определяемое источником питания компаратора 12,13 и его выходное напряжение подается на первый вход коммутатора, который переключается, так как имеет характеристику
Ги при и„ О (,, )
ЕиШб .- и 17
, О при и. о при и, 0 (Ug : и,7 ) .и при и, E,,,) и сигнал Пд от датчика 5 скорости подается на вход 15 блока 7 замедления, а далее через квадратор 25 с характеристикой U u|, усилитель 22 с характеристикой U четвертый вход сумматора 28 с характеристикой U.J9 П„- и,г2 - Ujj- U57, а также через усилитель 23 с характеристикой и„ и,5 Kjj , К2, на пятый вход сумматора 28. Кроме того, напряжение от датчика 5 скорости подается на интегратор 20, выходное напряжение которого определяется по выражению и К U d о где К2-- коэффициент передачи интегратора 20. Напряжение с выхода сумматора 28 подается на RS-триггер 21 с характеристикой0 при 28 . Е„ при и„ О где Ej - напряжение ,определяемое источником питания. При работе интегратора 20 напряжение на выходе сумматора 28 уменьшается. Уменьшается при этом также напряжение на выходе сумматора 19. В первом режиме в период t О , ,„ (фиг.4 вьшолняется условие U-.. .. .. .. 8 и„ - Ujp - Uj - Ugj О, т.е. напряжение на выходе сумматора 28 равно О, так как напряжение 11 + гз °° ч и RS-триггер 21 срабатывает и на его выходе устанавливается напряжение, которое подается на командньй блок 1 и на ключевой элемент 29. Командный блок 1 снимает сигнал задания скорости с згщатчика 2 интенсивности точка с, фиг.4), и начинается торможение электропривода по кривой cdef, а ключевой элемент 29 замыкается и подключает сигнал с выхода сумматора 28 на первый вход сумматора 3. Момент начала торможения в точке С определяется автоматически блоком 7 замедления с учетом расстояния до конечной точки останова и скорое91ти электропривода. При выбранной неличине ускорения в режиме замедления на участках cd и ef линия ускорения od имеет.постоянный наклон, а на участке.de ускорение постоянное. При повторении электроприводом кривой cdef (фиг.А) сигнал на выходе сумматора 28 равен 0. В случае возмущения по темпу уменьшения скорости при замедлении равенство и, и„ - Ujo - и.г - и, О наруша5-11 - II .|| -11 rzfl 1лаг тгт1та - ется, т.е. Ujg f и. Напряжение с выхода сумматора 28 в виде сигнала коррекции подается н сумматор 3 и вызьгеает изменение ско рости электропривода до момента, пока не станет равным нулю. Таким образом, стабилизируется также ускорение при торможении. Предлагаемое устройство предназначено для управления механизмами циклического действия. Перед началом каждого цикла рабо ты производится установка всех необ ходимых блоков, элементов в исходное состояние, например разряд конденсаторов регулятора скорости блока 4 регулирования скорости электро привода, снятие.напряжения ;с второго выхода командного блока 1, уста новка RS-триггера 21 в нулевое состояние и др. При рабогб устройства во втором режиме скорость электропривода равна Vj (фиг.4) и ниже максимальной V,, HO вьппе граничной V... , т.е. ,v,.,p, Пуск и работа электропривода производится по сигналу командного блока 1 аналогично рассмотренному вьше. При срабатывании датчика импульса замедления командный блок 1 выдает сигнал на переключение ключа 6 и ключевого элемента 19. После замыкания ключа 6 сигнал датчика 5 скорости, пропорциональный скорости V,j , подается через ком мутатор 13, квадратор 25, усилитель 22 на четвертый вход сумматора 28, также через усилитель 23 на пятый вход сумматора 28. При работе ийтегратора 20 по сигналу Uy Ug напряжение на его выходе увеличивается, а на выходе сумматора 28 уменьш ется. При Ujg « и„ - Ujp- Uj2 - О RS-триггер 21 переключается и на его. выходе :устанавливается напряже7Юние Е„ которое подается на командный блок 1 и на ключевой элемент 29. Командный блок 1 снимает сигнал задания скорости с датчика 2 интенсивности (момент t ty , фиг. 4) , и начинается торможение электропривода по кривой ghkl, а ключевой элемент 29 замь1кается и обеспечивает прохождение сигнала коррекции от выхода сумматора 28 до сумматора 3 аналогично рассмотренному в первом режиме. В этом режиме момент начала замедления также осуществляется автоматически блоком 7 замедления, обеспечивается также стабилизация ускоре„ я при замедлении. При работе устройства в третьем режиме скорость электропривода равна Vj (фиг.4), ниже или равна граничной V, Vp.rp.. Пуск и работа электропривода в этом режиме производится также по сигналу командного блока 1 аналогично рассмотренному в первом и во втором режимах. На выходе компаратора 12 после замыкания ключа 6 сигнал равен нулю, поэтому сигнал датчика скорости Vg подается на вход 14 блока 7 замедления, а далее через усилитель 24 с характеристикой UH UH- К,,; К,, ерез блок 26 извлечения квадратного корIс характеристикой U а второй вход блока 27 умножения с характеристикой и„ U,. Сигнал Uj с выхода блока 27 умножения подается на первый .вход сумматора 28. При увеличении выходного напряжения на интеграторе 20, работающем по сигналу от датчика 5 скорости, напряжение на выходе сумматора 28 уменьшается и при выполнении условия и„- 17 срабатывает RS-триггер 21, замыкается ключевой элемент 29 и далее снимается сигнал задания скорости на выходе командного блока I Торможение производится при t tb по кривой prs. Дальнейшая работа электропривода аналогична описанному, Таким образом, устройство обеспечивает ограничение рывка, стабилизацию режимов замедления при высоком качестве переходных процессов, т.е. точную остановку без перерегулирования, ограничение динамических нагрузок электропривода. В устройстве можно регулировать темп изменения ускорения, т.е. диаграмма ускорений имеет вид трапеции. Это позволяет исключить механические колебания сис темы электропривода и избежать неперегулирование после остановки электропривода, т.е. обеспечить остановку в заданной точке без колебаний, а в итоге сократить время, необходимое для операций одного цикла. Отмеченные факторы позволяют повысить надежность и безопасность эксплуатации электропривода. Формула изобретения 1.Устройство для точного останова электропривода по авт.св.№ 118261 отличающееся тем, что, с целью повьшения надежности и безопас ности эксплуатации электропривода, в него дополнительно введены последовательно соединенные компаратор и коммутатор, выходы которого соединены с четвертым и пятым входами блока замедления, первый вход которого соединен с вторым входом коммутатора и первым входом компаратора. 2.Устройство по п.I, о т л и чающееся тем, что блок замед пения содержит инвертирующий усилитель, первый ключевой элемент, интегратор, RS-триггер, первый усилитель, второй усилитель, третий усилитель, квадратор, блок извлечения квадратного корня и последовательно соединенные блок умножения, сумматор, второй ключевой элемент, выходом соединенный с первым выходом блока замедления, подключенного вторым выходом к второму входу второго ключевого элемента, а также через RS-триггер - к выходу сумматора, третьим входом - к второму входу сумматора, первым входом - к первому входу интегратора, выход которого соединен с третьим входом сумматора и через первьй ключевой элемент с вторьм входом интегратора, вторым входом через инвертирующий усилитель - к второму входу первого ключевого элемента, четвертый вход сумматора через последовательно соединеннью первый усилитель и квадратор подключен к пятому входу блока замедления, соединенного также через второй усилитель с пятым входом сумматора, четвертый вход блока замедления соединен с первым входом блока умножения, а также через последовательно соединенные третий усилитель и блок извлечения квадратного корня - с вторым входом блока умножения.
$ocdef - SoSg/jHS SoQprs
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для точного останова электропривода | 1984 |
|
SU1182618A1 |
| Электропривод с оптимальным управлением | 1987 |
|
SU1534719A1 |
| Устройство для точного останова электропривода | 1988 |
|
SU1614086A2 |
| Устройство автоматического управления скоростью прокатного стана | 1984 |
|
SU1205954A1 |
| Электропривод отрезного устройства | 1982 |
|
SU1058726A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 2010 |
|
RU2460110C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 2009 |
|
RU2399080C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 2010 |
|
RU2450300C1 |
| Задающее устройство для электропривода | 1984 |
|
SU1248021A2 |
| Система позиционного управления электроприводом | 1985 |
|
SU1312521A1 |
Изобретение относится к электротехнике, а именно к автоматическому управлению электроприводами. Повышение надежности и безопасности управления обеспечивается за счет введения последовательно соединенных компаратора 12 и коммутатора 13, первый выход 14 и второй выход 15 которого соединены соответственно с четвертым и пятым входами блока замедления 7, первый вход 16 которого соединен с входами коммутатора I3 и компаратора 12, второй вход 17 которого соединен с источником постоянного-входного сигнала.В устрС1Йстве достигается ограничение рывка и стабилизация режимов замедления при выс S соком качестве переходных процессов. I з.п. ф-лы, 4 ил. (Л с
| Устройство для точного останова электропривода | 1984 |
|
SU1182618A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
